Изобретение относится к моноимпульсным пеленгаторам (МП) и предназначено для измерения угловых координат радиолокационных целей, например, в прямоотсчетных МП.
Известен МП, содержащий включенные последовательно суммарно-разностное приемное устройство со схемой автоматической регулировки усиления (АРУ) и фазовый детектор (ФД) с выходом для сигнала угловой ошибки (СУО) [А.И.Леонов, К.И.Фомичев. Моноимпульсная радиолокация. - М.: Радио и связь, 1984, рис.1.5а на с.14].
Суммарно-разностное приемное устройство содержит двухканальную антенну, суммарно-разностное устройство, преобразователи частоты и усиления суммарного и разностного сигналов. Схема АРУ служит для нормировки указанных сигналов. ФД (синхронный (СД) или квадратурный (КД) при амплитудной или фазовой пеленгации соответственно) формирует СУО Uфд в виде действительной или мнимой составляющих отношения векторов разностного и суммарного сигналов при амплитудной или фазовой пеленгации соответственно.
Однако в силу своей инерционности АРУ не может работать по нескольким близко расположенным целям [там же, с.14].
Известен также МП по Патенту US 3159234 от 10.1964, G01S 9/22, содержащий включенные последовательно суммарно-разностное приемное устройство, преобразователь угловой информации из соотношений амплитуд суммарного U∑ и разностного UΔ сигналов в соотношение фаз сигналов U1=U∑+jUΔ и U2=UΔ+jU∑, выходы для которых через амплитудные ограничители соединены со входами СД.
Амплитудные ограничители обеспечивают безинерционную нормировку сигналов U1 и U2
U1ОГ=UОГ×exp(j(ωt+ϕ1)),
U2ОГ=UОГ×exp(j(ωt+ϕ2)).
СД выделяет действительную составляющую сигнала, полученную в результате умножения и усреднения входных сигналов по следующей формуле [А.И.Леонов, К.И.Фомичев. Моноимпульсная радиолокация. - М.: Радио и связь, 1984, ф-лы 4.9 и 4.10 на с.68].

где Δϕ=ϕ1-ϕ2=k×sin(α), k=2πd/λ - волновой коэффициент.
Известны также и другие варианты технической реализации МП с амплитудными ограничителями для нормировки сигналов, например патенты US 3969726 с приоритетом от 13.07.76 г. G01S 9/22 и US 5402130 с приоритетом от 28.05.81 г. G01S 9/22 и др.
Однако нелинейность амплитудных ограничителей ведет к появлению мешающей составляющей в измеряемом СУО под воздействием внутренних и внешних аддитивных помех, что снижает точность пеленгования [А.М.Зуфрин. Методы построения судовых автоматических угломерных систем. Л. Судостроение, 1970, с.124].
Наиболее близким по технической сущности является МП [Теоретические основы радиолокации./Под редакцией В.Е.Дулевича, М. Сов. Радио, 1978, рис.13.12в и ф-ла 13.16 на с.384-386], содержащий включенные последовательно суммарно-разностное приемное устройство и преобразователь угловой информации из соотношений амплитуд суммарного U∑ и разностного UΔ сигналов в соотношение фаз сигналов U1=U∑+jUΔ и U2=UΔ+jU∑, выходы для которых через СД и КД соединены соответственно с первым и вторым входами делителя, выход которого является выходом МП для СУО. СУО данного МП представляет собой оценку разности фаз сигналов U1 и U2 в виде отношения квадратурных составляющих взаимно-корреляционной функции

Сигнал  в знаменателе выражения (2) является функцией угловой координаты α и потому искажает измеряемый СУО. Так, в явном виде зависимость СУО от α при аппроксимации диаграмм направленности (ДН) суммарного и разностного сигналов U∑=cos(α) UΔ=sin(α)
в знаменателе выражения (2) является функцией угловой координаты α и потому искажает измеряемый СУО. Так, в явном виде зависимость СУО от α при аппроксимации диаграмм направленности (ДН) суммарного и разностного сигналов U∑=cos(α) UΔ=sin(α)

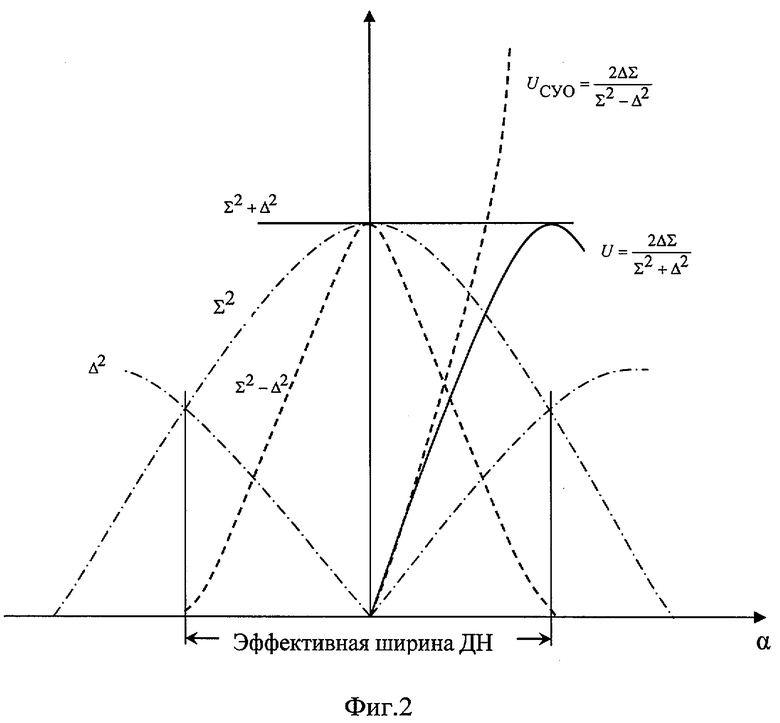
Недостатком данного МП является существенное уменьшение его рабочего диапазона углов (примерно в 2 раза) из-за того, что в пределах эффективной ширины ДН суммарного сигнала значение стремится к нулю, a Uсуо - к бесконечности, как показано на фиг.2 прилагаемых чертежей.
Указанный недостаток может быть устранен посредством формирования СУО в виде:
где  так как соответствует всей принятой от цели энергии электромагнитных волн, значение которой в пределах эффективной ширины ДН суммарного сигнала практически постоянно, что обеспечивает расширение рабочего диапазона углов [Теоретические основы радиолокации./Под редакцией В.Е.Дулевича, М. Сов. Радио, 1964, с.449].
так как соответствует всей принятой от цели энергии электромагнитных волн, значение которой в пределах эффективной ширины ДН суммарного сигнала практически постоянно, что обеспечивает расширение рабочего диапазона углов [Теоретические основы радиолокации./Под редакцией В.Е.Дулевича, М. Сов. Радио, 1964, с.449].
Однако состав элементов и функциональные связи известного МП не обеспечивают указанной возможности.
Технической задачей, решаемой предлагаемым МП, является устранение указанного недостатка, а именно расширение рабочего диапазона углов.
Поставленная задача решается тем, что в известный МП дополнительно введен коррелятор, который своим входом соединен с одним из выходов указанного преобразователя угловой информации, а своим выходом - со вторым входом делителя, при этом коррелятор выполняет перемножение и усреднение двух комплексно-сопряженных значений одного из выходных сигналов U1 или U2 преобразователя угловой информации.
Введенные отличия (коррелятор и его связи) обеспечивают формирование нормирующего сигнала в виде  что устраняет искажения СУО и расширяет рабочий диапазон углов.
что устраняет искажения СУО и расширяет рабочий диапазон углов.
Функциональная схема предлагаемого МП изображена на фиг.1, а принцип его работы и достигаемый технический результат поясняется графически на фиг.2.
В функциональной схеме предлагаемого МП введены следующие обозначения:
1 - суммарно-разностное приемное устройство;
2 - преобразователь угловой информации из соотношения амплитуд суммарного U∑ и разностного UΔ сигналов в соотношение фаз сигналов U1 и U2;
3 - синхронный (фазовый) детектор (СД);
4 - делитель;
5 - коррелятор (К).
Суммарно-разностное приемное устройство 1 своими выходами соединено со входами преобразователя угловой информации 2 для суммарного U∑ и разностного UΔ сигналов, который своими выходами соединен со входами синхронного (фазового) детектора 3. Один из выходов преобразователя угловой информации 2 также соединен со входом коррелятора 5. Выход СД 3 и выход коррелятора 5 соединены соответственно с первым (т.е. для делимого) и со вторым (т.е. для делителя) входами делителя 4, выход которого является выходом предлагаемого МП.
Коррелятор 5 является типовым элементом радиоприемных устройств и используется по своему прямому назначению [Проектирование радиолокационных приемных устройств./Под ред. М.А.Соколова, М., Высшая школа, 1984, рис.1.33 на с.40].
Синхронный (фазовый) детектор СД 3 выделяет действительную составляющую сигнала посредством перемножения и усреднения комплексно-сопряженных значений двух входных сигналов 
Зависимости сигналов  ,
,  от угла α показаны на фиг.2.
от угла α показаны на фиг.2.
Коррелятор 5 выполняет операцию перемножения и усреднения двух комплексно-сопряженных значений одного из выходных сигналов преобразователя угловой информации 2, например,  и формирует сигнал
и формирует сигнал 
как показано на фиг.2.
Сигналы Uсд и Uк поступают соответственно на первый и второй входы делителя 4, формирующего на своем выходе сигнал угловой ошибки предлагаемого МП  Данная зависимость изображена на фиг.2.
Данная зависимость изображена на фиг.2.
Таким образом, введенные отличия обеспечили расширение рабочего диапазона углов МП до границ, соответствующих эффективной ширине ДН суммарного сигнала. Из сравнения графического представления выражений (3) и (4) на фиг.2 следует, что выигрыш по сравнению с прототипом равен примерно двум.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2326397C1 |
| СПОСОБ МОНОИМПУЛЬСНОЙ ГИДРОЛОКАЦИИ | 2015 |
|
RU2626148C2 |
| СПОСОБ СОВМЕСТНОГО МОНОИМПУЛЬСНОГО МГНОВЕННОГО ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ПРИНИМАЕМОГО СИГНАЛА И ПЕЛЕНГА ИСТОЧНИКА ЭТОГО СИГНАЛА | 2012 |
|
RU2492500C1 |
| ПРИЕМНОЕ УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС | 1995 |
|
RU2084919C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1997 |
|
RU2108595C1 |
| Способ измерения угла места маловысотной цели и устройство для его осуществления | 2020 |
|
RU2752235C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| ПРИЕМНОЕ УСТРОЙСТВО ДЛЯ МОНОИМПУЛЬСНОГО РАДИОЛОКАТОРА | 2005 |
|
RU2298808C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| АМПЛИТУДНЫЙ НЕСЛЕДЯЩИЙ ИТЕРАЦИОННЫЙ РАДИОПЕЛЕНГАТОР ДЛЯ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1984 |
|
SU1841062A1 |
Моноимпульсный пеленгатор (МП) предназначен для измерения угловых координат радиолокационных целей и содержит суммарно-разностное приемное устройство, преобразователь угловой информации из соотношения амплитуд суммарного и разностного сигналов в соотношение фаз выходных сигналов и синхронный (фазовый) детектор СД, включенные последовательно, а также делитель, соединенный своим первым входом с выходом СД, а своим выходом - с выходом МП. Для расширения рабочего диапазона углов в пределах эффективной ширины диаграммы направленности суммарного сигнала введен коррелятор, который выполняет перемножение и усреднение двух комплексно-сопряженных значений одного из выходных сигналов U1 или U2 преобразователя угловой информации, и своим входом соединен с одним из выходов указанного преобразователя угловой информации, а своим выходом - со вторым входом делителя. Достигаемым техническим результатом является расширение рабочего диапазона углов. 2 ил.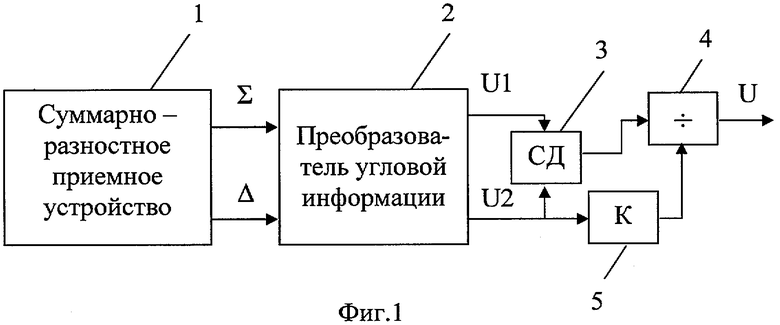
Моноимпульсный пеленгатор (МП), содержащий суммарно-разностное приемное устройство, преобразователь угловой информации из соотношений амплитуд суммарного U∑ и разностного UΔ сигналов в соотношение фаз сигналов U1=U∑+jUΔ и U2=UΔ+jU∑ и синхронный (фазовый) детектор (СД), включенные последовательно, а также содержащий делитель, соединенный своим первым входом с выходом СД, а своим выходом - с выходом МП, отличающийся тем, что он дополнительно содержит коррелятор, который своим входом соединен с одним из выходов указанного преобразователя угловой информации, а своим выходом - со вторым входом делителя, при этом коррелятор выполняет перемножение и усреднение двух комплексно-сопряженных значений одного из выходных сигналов U1 или U2 преобразователя угловой информации.
| Теоретические основы радиолокации | |||
| Под ред | |||
| ДУЛЕВИЧА В.Е., Москва, Сов | |||
| Радио, 1978, с.384-386 | |||
| RU 2000107984 А, 10.07.2002 | |||
| RU 2001103037 А, 20.01.2003 | |||
| ДВУХКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 1993 |
|
RU2078348C1 |
| US 6118402 А, 12.09.2000 | |||
| US 6087974 А, 11.07.2000 | |||
| ЕР 1012623 А1, 28.06.2000. | |||

