Изобретения относятся к области радиотехники и могут быть применены в системах моноимпульсной радиолокации и радиопеленгации, использующих антенную решетку и цифровую обработку сигналов.
Для определения с высокой точностью угловых координат (УК) целей с 40-50 гг. прошлого века применяется моноимпульсный амплитудный суммарно-разностный метод пеленгации [Родс Д.Р. Введение в моноимпульсную радиолокацию. - М.: Сов. радио, 1960, 160 с.], потенциально позволяющий получить результат по единственному принятому импульсу. При этом еще 30 лет назад отмечалось, что «моноимпульсные РЛС не используют своих потенциальных возможностей в быстродействии и извлекают угловую информацию о цели из серии последовательных импульсов» [Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация - М.: Радио и связь, 1984, 312 с., стр. 127]. И в настоящее время авторам не известны публикации о способах определения УК цели по единственному импульсу, не имеющих существенных ограничений. Поэтому вопросы приближения быстродействия пеленгаторов и радиолокационных систем (РЛС) к теоретически возможному пределу при высокой точности определения УК в случае высокого отношения сигнал/шум являются актуальными.
Известен способ обработки сигналов при обзорной одноканальной амплитудной пеленгации [патент РФ 2159940. Способ обработки сигналов при одноканальной амплитудной пеленгации], являющийся аналогом заявляемого первого способа, при котором формируют диаграмму направленности (ДН), перемещающуюся в плоскости пеленгации, принимают сигнал источника радиоизлучения (ИРИ), пространственно манипулируют перемещающейся ДН на ее ширину по уровню минус 3 дБ, принятый сигнал селектируют по частоте манипуляции, обнаруживают сигнал радиометрическим способом, перемещают манипулированную ДН в секторе обнаружения, по максимальному уровню сигнала формируют сектор пеленгования и требуемый коэффициент усиления тракта, производят перемещение манипулированной ДН в обе стороны сектора пеленгования, по снятым при этом реализациям сигнала вычисляют абсциссы центров тяжести полученных реализаций и по их среднему значению - пеленг.
Недостатками аналога являются энергетические потери из-за одноканальной обработки, низкая точность из-за нелинейности пеленгационной характеристики (ПХ) и большое время, затрачиваемое на ее формирование.
Более близким по технической сущности к заявляемому первому способу является способ обработки сигналов при двухканальной обзорной амплитудной пеленгации [патент РФ 2225990. Способ обработки сигналов при двухканальной амплитудной пеленгации / Аветисьянц В.А., Горовой А.В., Ларионов Б.А., Музыченко Н.Ю., Фоминченко Г.Л.], принятый за прототип, в котором формируют пару ДН углового датчика, сдвинутых на ширину ДН по уровню минус 3 дБ и образующих равносигнальное направление (РСН), осуществляют в заданном угловом секторе поиск сигналов, принимают сигналы ИРИ и селектируют их по частоте, формируют ПХ углового дискриминатора путем перемещения пары ДН в пределах сектора пеленгования, вычисления абсцисс центров тяжести полученных реализаций в моменты максимальных значений корреляционных интегралов, вычисленных по способу совпадения полярностей и аппроксимации ее линейной функцией, и, решая пеленгационное уравнение, вычисляют угол прихода сигналов ИРИ.
Недостатками прототипа первого способа являются низкая точность определения УК из-за грубой аппроксимации нелинейной ПХ линейной функцией и низкое быстродействие из-за необходимости получения множества реализаций сигнала для формирования ПХ углового дискриминатора.
Аналогом заявляемого второго способа может служить способ обработки сигналов при обзорной одноканальной амплитудной пеленгации [патент РФ 2159940. Способ обработки сигналов при одноканальной амплитудной пеленгации], при котором формируют ДН, перемещающуюся в плоскости пеленгации, принимают сигнал ИРИ, пространственно манипулируют перемещающейся ДН на ее ширину по уровню минус 3 дБ, принятый сигнал селектируют по частоте манипуляции, обнаруживают сигнал радиометрическим способом, перемещают манипулированную ДН в секторе обнаружения, по максимальному уровню сигнала формируют сектор пеленгования и требуемый коэффициент усиления тракта, производят перемещение манипулированной ДН в обе стороны сектора пеленгования, по снятым при этом реализациям сигнала вычисляют абсциссы центров тяжести полученных реализаций и по их среднему значению - пеленг.
Недостатками аналога являются энергетические потери из-за одноканальной обработки, низкая точность из-за нелинейности пеленгационной характеристики и большое время, затрачиваемое на ее формирование.
В качестве прототипа заявляемого второго способа выбран способ обработки сигналов при двухканальной обзорной амплитудной пеленгации [патент РФ 2225990. Способ обработки сигналов при двухканальной амплитудной пеленгации / Аветисьянц В.А., Горовой А.В., Ларионов Б.А., Музыченко Н.Ю., Фоминченко Г.Л.], в котором формируют пару ДН углового датчика, сдвинутых на ширину ДН по уровню минус 3 дБ и образующих РСН, осуществляют в заданном угловом секторе поиск сигналов, принимают сигналы ИРИ и селектируют их по частоте, формируют ПХ углового дискриминатора путем перемещения пары ДН в пределах сектора пеленгования, вычисления абсцисс центров тяжести полученных реализаций в моменты максимальных значений корреляционных интегралов, вычисленных по способу совпадения полярностей и аппроксимации ее линейной функцией, и, решая пеленгационное уравнение, вычисляют угол прихода сигналов ИРИ.
Недостатками прототипа второго способа являются низкая точность определения УК из-за грубой аппроксимации нелинейной ПХ линейной функцией и низкое быстродействие из-за необходимости получения множества реализаций сигнала для формирования ПХ углового дискриминатора.
Задачей, на решение которой направлен предлагаемый первый способ, является повышение точностных характеристик и быстродействия при обзорной амплитудной суммарно-разностной пеленгации с учетом того, что для обзорной пеленгации важны ширина рабочей зоны 2ϑРЗ и точность аппроксимации пеленгационной характеристики S(ϑ) в этой зоне (-ϑРЗ≤ϑ≤ϑРЗ) линейной функцией.
Для решения этой задачи, согласно первому изобретению, применяют способ цифровой обработки сигналов при обзорной моноимпульсной амплитудной суммарно-разностной пеленгации с использованием антенной решетки, при котором в соответствии с весовой функцией, описывающей распределение поля в раскрыве антенной решетки и обеспечивающей заданный уровень боковых лепестков, формируют диаграммы направленности F1(ϑ)≡F(ϑ-ϑ0) и F2(ϑ)≡F(ϑ+ϑ0) парциальных каналов приема углового датчика, где ϑ - текущий угол, отсчитываемый от РСН, причем максимумы этих диаграмм отстоят в каждую сторону от РСН на угол смещения ϑ0, а также сопряженную с ними диаграмму направленности компенсационного канала, обеспечивающую определенное превышение усиления этого канала над усилением по боковым лепесткам диаграмм направленности парциальных каналов, принимают сигналы источников радиоизлучений, осуществляют их аналого-цифровое преобразование, на выходах парциальных каналов обнаруживают сигналы с уровнями соответственно U1 и U2 и измеряют их параметры, селектируют из потоков этих сигналов те из них, уровни которых одновременно превышают уровень сигнала компенсационного канала, вычисляют сигнал рассогласования  являющийся значением пеленгационной характеристики
являющийся значением пеленгационной характеристики  углового дискриминатора, и по значению SCР находят значение угла ϑ прихода сигнала источника радиоизлучения - пеленг.
углового дискриминатора, и по значению SCР находят значение угла ϑ прихода сигнала источника радиоизлучения - пеленг.
Согласно изобретению, в заявленном первом способе до приема сигналов осуществляют моделирование процесса их приема и обработки, при котором используют весовую функцию Хэмминга w(x)=0.08+0.92cos2(πх/2), -1≤х≤1, обеспечивающую уровень боковых лепестков не выше минус 40 дБ и, с учетом далее определяемого значения угла смещения ϑ0, ширину рабочей зоны пеленгации не менее двукратной ширины диаграммы направленности парциального канала по уровню половинной мощности, или другую весовую функцию, обеспечивающую не более высокий, чем функция Хэмминга, уровень боковых лепестков и не меньшую ширину рабочей зоны, в процессе моделирования определяют на основе весовой функции и параметров антенной решетки конкретный вид функций F1(ϑ), F2(ϑ) и S(ϑ,ϑ0), параметрически зависящих от угла смещения ϑ0, разлагают нечетную функцию S(ϑ,ϑ0), описывающую пеленгационную характеристику, по нечетным степеням угла ϑ в ряд Маклорена
коэффициенты bk(ϑ0) которого являются функциями угла смещения ϑ0, определяют предварительное значение угла смещения как результат решения задачи b3(ϑ0)=0, обеспечивающее линейность пеленгационной характеристики с точностью до членов разложения пятого и более высоких порядков, вычисляют окончательное значение угла смещения ϑ0 как результат решения задачи ϑРЗ(ϑ0)→max, обеспечивающее максимальное значение ширины ϑРЗ(ϑ0)≡ϑРЗ(ϑ0,εmax) рабочей зоны, в которой ошибка измерения угла ϑ не превышает максимальной ошибки emах, которая, в свою очередь, задана не превышающей, например, 0,01 ширины диаграммы направленности парциального канала по уровню половинной мощности, вычисляют по полученному значению угла смещения значение коэффициента b1(ϑ0), затем использованную при моделировании весовую функцию и определенное в результате моделирования значение угла смещения ϑ0 используют при формировании диаграмм направленности антенной решетки, приеме и обработке сигнала, получая значение SСР, после чего вычисляют значение угла ϑ прихода сигнала источника радиоизлучения - пеленг ϑС по формуле  как результат решения линейного уравнения b1(ϑ0)ϑ=SCP.
как результат решения линейного уравнения b1(ϑ0)ϑ=SCP.
Техническим результатом первого способа является повышение точностных характеристик и быстродействия, вплоть до определения угла прихода сигнала по единственной его реализации, с точностью, например, не хуже 1% ширины ДН парциального канала при обзорной амплитудной суммарно-разностной пеленгации и высоком отношении сигнал/шум за счет достижения высокой линейности пеленгационной характеристики во всей рабочей зоне пеленгации, ширина которой составляет не менее двукратной ширины ДН парциального канала по уровню половинной мощности.
Задачей, на решение которой направлен предлагаемый второй способ, является повышение точностных характеристик и быстродействия при обзорной амплитудной суммарно-разностной пеленгации с учетом того, что для обзорной пеленгации важны ширина рабочей зоны 2ϑРЗ и точность аппроксимации пеленгационной характеристики S(ϑ) в этой зоне (-ϑРЗ≤ϑ≤ϑРЗ) функцией, обеспечивающей точность и быстроту вычисления пеленга.
Для решения этой задачи предлагается второй способ цифровой обработки сигналов при обзорной моноимпульсной амплитудной суммарно-разностной пеленгации с использованием антенной решетки, при котором в соответствии с весовой функцией, описывающей распределение поля в раскрыве антенной решетки и обеспечивающей заданный уровень боковых лепестков, формируют диаграммы направленности F1(ϑ)≡F(ϑ-ϑ0) и F2(ϑ)≡F(ϑ+ϑ0) парциальных каналов приема углового датчика, где ϑ - текущий угол, отсчитываемый от равносигнального направления, причем максимумы этих диаграмм отстоят в каждую сторону от равносигнального направления на угол смещения ϑ0, а также сопряженную с ними диаграмму направленности компенсационного канала, обеспечивающую определенное превышение усиления этого канала над усилением по боковым лепесткам диаграмм направленности парциальных каналов, принимают сигналы источников радиоизлучений, осуществляют их аналого-цифровое преобразование, на выходах парциальных каналов обнаруживают сигналы с уровнями соответственно U1, и U2 и измеряют их параметры, селектируют из потоков этих сигналов те из них, уровни которых одновременно превышают уровень сигнала компенсационного канала, вычисляют сигнал рассогласования  являющийся значением пеленгационной характеристики
являющийся значением пеленгационной характеристики  углового дискриминатора, и по значению SCP находят значение угла ϑ прихода сигнала источника радиоизлучения - пеленг.
углового дискриминатора, и по значению SCP находят значение угла ϑ прихода сигнала источника радиоизлучения - пеленг.
Согласно изобретению в заявленном втором способе до приема сигналов осуществляют моделирование процесса их приема и обработки, при котором используют весовую функцию Хэмминга w(x)=0.08+0.92cos2(πx/2), -1≤х≤1, обеспечивающую уровень боковых лепестков не выше минус 40 дБ и, с учетом далее определяемого значения угла смещения ϑ0, ширину рабочей зоны пеленгации не менее двукратной ширины диаграммы направленности парциального канала по уровню половинной мощности, или другую весовую функцию, обеспечивающую не более высокий, чем функция Хэмминга, уровень боковых лепестков и не меньшую ширину рабочей зоны, в процессе моделирования определяют на основе весовой функции и параметров антенной решетки конкретный вид функций F1(ϑ), F2(ϑ) и S(ϑ,ϑ0), параметрически зависящих от угла смещения ϑ0, разлагают нечетную функцию S(ϑ,ϑ0), описывающую пеленгационную характеристику, по нечетным степеням угла ϑ в ряд Маклорена
коэффициенты bk(ϑ0) которого являются функциями угла смещения ϑ0, определяют окончательное значение угла смещения как результат решения задачи ϑ5(ϑ0)=0, обеспечивающее соответствие пеленгационной характеристики кубической функции с отклонением только в седьмом и более высоких порядках членов разложения, далее по полученному значению угла смещения вычисляют значения коэффициентов b1(ϑ0) и b3(ϑ0), затем использованную при моделировании весовую функцию и определенное в результате моделирования значение угла смещения ϑ0 используют при формировании диаграмм направленности антенной решетки, приеме и обработке сигнала, получая значение SCP, после чего вычисляют значение угла ϑ прихода сигнала источника радиоизлучения, совпадающее с пеленгом ϑC, как минимальное по абсолютной величине действительное решение кубического уравнения b1(ϑ0)ϑ+b3(ϑ0)ϑ3=SCP, полученное по формулам Кардано.
Техническим результатом второго способа является повышение точностных характеристик и быстродействия, вплоть до определения угла прихода сигнала по единственной реализации, с точностью, например, не хуже 1% ширины ДН парциального канала при обзорной амплитудной суммарно-разностной пеленгации за счет достижения соответствия ПХ кубической функции во всей рабочей зоне пеленгации.
Отличительной особенностью предложенных способов является дополнительно еще и то, что при малом числе антенных элементов в антенной решетке и, следовательно, большой ширине ее диаграммы направленности, а также при сканировании, вместо переменных ϑ и ϑ0 используют значения синусов этих углов, то есть значения u и u0, где u=sinϑ и u0=sinϑ0, причем нулевым значениям углов соответствует нормаль к раскрыву антенной решетки.
Аналогом заявляемого устройства, реализующего предложенные способы, является пеленгатор с обработкой сигналов при обзорной одноканальной амплитудной пеленгации [патент РФ 2159940. Способ обработки сигналов при одноканальной амплитудной пеленгации], содержащий последовательно соединенные антенную систему (АС) на базе фазированной антенной решетки, радиоприемное устройство (РПУ), амплитудный детектор, демодулятор и вычислитель, а также устройство управления диаграммой направленности (УУДН), фильтр, коммутатор, устройство управления и синхронизации (УУС) и генератор. Выход амплитудного детектора через фильтр связан со входом коммутатора, выходы УУДН связаны с управляющим входом АС и вторым входом вычислителя, другие выходы которого связаны со вторым входом коммутатора и входами УУС, выходы которого связаны с третьим и четвертым входами УУДН, управляющим входом коммутатора, четвертым входом и входом ПЕЛ. вычислителя.
Недостатками аналога заявляемого устройства являются энергетические потери из-за одноканальной обработки, низкая точность из-за нелинейности пеленгационной характеристики и большое время, затрачиваемое на ее формирование.
В качестве прототипа заявляемого устройства, реализующего предложенные способы, выбран пеленгатор с обработкой сигналов при двухканальной обзорной амплитудной пеленгации [патент РФ 2225990. Способ обработки сигналов при двухканальной амплитудной пеленгации / Аветисьянц В.А., Горовой А.В., Ларионов Б.А., Музыченко Н.Ю., Фоминченко Г.Л.], содержащий последовательно соединенные АС на базе фазированной антенной решетки, двухканальное РПУ, коррелятор и вычислитель, а также УУДН, амплитудный детектор, фильтр, сумматор, коммутатор и УУС. Выходы РПУ через амплитудный детектор и фильтр связаны со входами сумматора, выход которого связан с первым входом коммутатора и вторым входом вычислителя. Первый выход УУДН связан с управляющим входом АС, второй - с третьим входом вычислителя, причем второй выход вычислителя связан со вторым входом коммутатора, третий - с первым входом УУДН, четвертый и пятый - с первым и вторым входами УУС, при этом первый выход УУС связан с третьим входом УУДН, второй - с четвертым, третий - с управляющим входом коммутатора, пятый - с четвертым входом вычислителя, шестой - с входом ПЕЛ вычислителя. Выход коммутатора связан с третьим входом РПУ.
Недостатками прототипа заявляемого устройства являются низкая точность определения УК из-за грубой аппроксимации нелинейной ПХ линейной функцией и низкое быстродействие из-за необходимости получения множества реализаций сигнала для формирования ПХ углового дискриминатора.
Задачей, на решение которой направлено создание обзорного моноимпульсного амплитудного суммарно-разностного пеленгатора, реализующего предложенные способы, является повышение его точностных характеристик и быстродействия, вплоть до определения угла прихода сигнала по единственной реализации, с точностью, например, не хуже 1% ширины ДН парциального канала при высоком отношении сигнал/шум.
Для решения указанной задачи предлагается обзорный моноимпульсный амплитудный суммарно-разностный пеленгатор с использованием антенной решетки и цифровой обработки сигналов, содержащий последовательно соединенные блок антенных элементов, блок многоканального радиоприемного устройства, блок аналого-цифровых преобразователей, блок умножителей, диаграммообразующее устройство, блок согласованных фильтров, блок селекции, измеритель сигнала углового рассогласования и устройство управления, причем первый, второй, третий и четвертый управляющие выходы устройства управления подключены соответственно к входу управления блока многоканального радиоприемного устройства, входу управления синтезатора частот, первому входу управления диаграммообразующего устройства и входу управления блока обнаружения и измерения параметров сигналов, гетеродинный выход синтезатора частот подключен к одноименному входу блока многоканального радиоприемного устройства, а выход дискретизации синтезатора частот - к одноименному входу блока аналого-цифровых преобразователей, выходы U1 и U2 парциальных каналов диаграммообразующего устройства соединены с одноименными входами блока согласованных фильтров и блока обнаружения и измерения параметров сигналов, выход параметров которого подключен к одноименным входам блока согласованных фильтров и устройства управления.
Согласно изобретению в него дополнительно введены последовательно соединенные запоминающее устройство значений весовой функции, вычислитель видов функциональных зависимостей, вычислитель коэффициентов bk(ϑ0) разложения пеленгационной характеристики, вычислитель значения угла смещения ϑ0, вычислитель окончательных значений коэффициентов bk(ϑ0) и b3(ϑ0) и вычислитель пеленга ϑС, причем выход запоминающего устройства значений весовой функции соединен через устройство управления со входом управления блока умножителей, а вход управления запоминающего устройства значений весовой функции - с выходом управления вычислителя видов функциональных зависимостей, выход вычислителя видов функциональных зависимостей соединен через вычислитель коэффициентов bk(ϑ0) разложения пеленгационной характеристики со входом вычислителя значения угла смещения ϑ0 и вторым входом вычислителя окончательных значений коэффициентов разложения b1(ϑ0) и b3(ϑ0), выход вычислителя значения угла смещения подключен к первому входу вычислителя окончательных значений коэффициентов b1(ϑ0) и b3(ϑ0), а через устройство управления - ко второму входу управления диаграммообразующего устройства, вход данных вычислителя значения угла смещения ϑ0 соединен с седьмым выходом устройства управления, выход вычислителя окончательных значений коэффициентов b1(ϑ0) и b3(ϑ0) подключен к первому входу вычислителя пеленга, второй вход вычислителя пеленга соединен через устройство управления с выходом измерителя сигнала углового рассогласования, а входы данных и управления вычислителя видов функциональных зависимостей подключены к пятому и шестому выходам устройства управления.
Техническим результатом предлагаемого устройства является достижение повышенных точностных характеристик и быстродействия, вплоть до определения угла прихода сигнала по единственной реализации, с точностью, например, не хуже 1% ширины ДН парциального канала при обзорной амплитудной суммарно-разностной пеленгации за счет соответствия ПХ линейной или кубической функции во всей рабочей зоне пеленгации.
Предлагаемые изобретения не известны в современной радиотехнике, а также не известны источники информации, содержащие сведения об аналогичных технических решениях, имеющих признаки, сходные с признаками, отличающими заявляемые решения от прототипа, а также свойства, совпадающие со свойствами заявляемых решений, поэтому можно считать, что они обладают существенными отличиями, вытекают из них неочевидным образом и, следовательно, соответствуют критериям «новизна» и «изобретательский уровень».
Сущность изобретений поясняется чертежами:
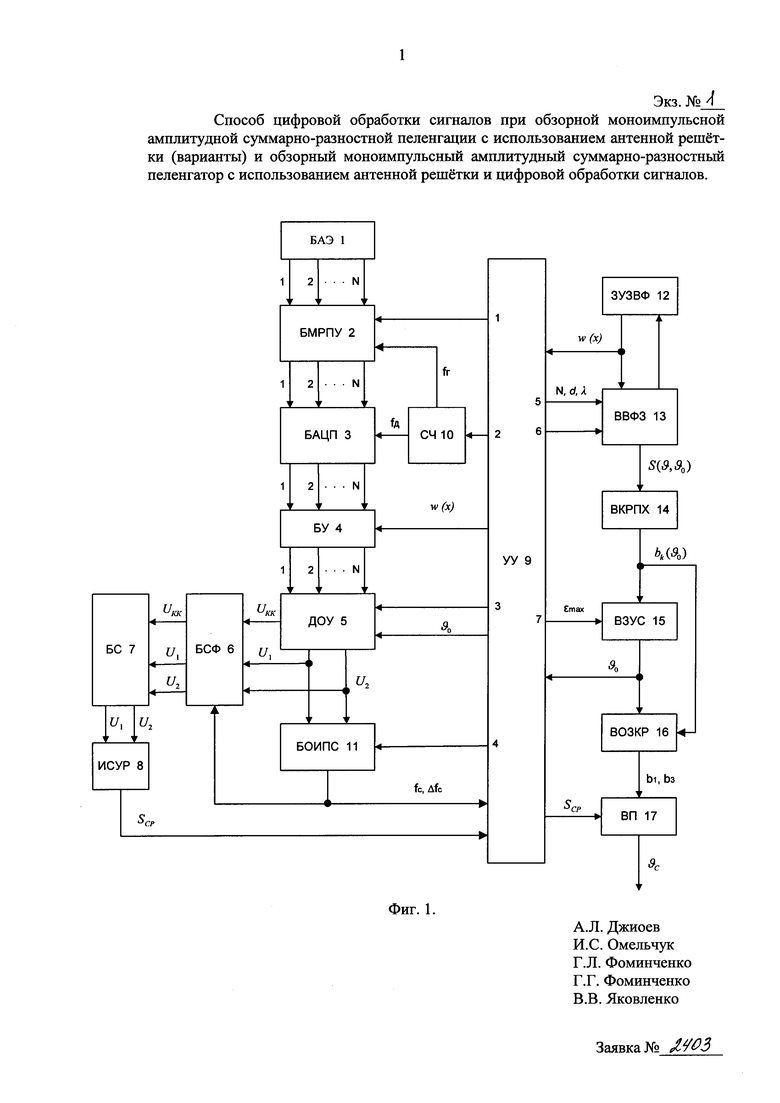
фигура 1 - схема электрическая структурная предлагаемого устройства, реализующего предлагаемые способы;
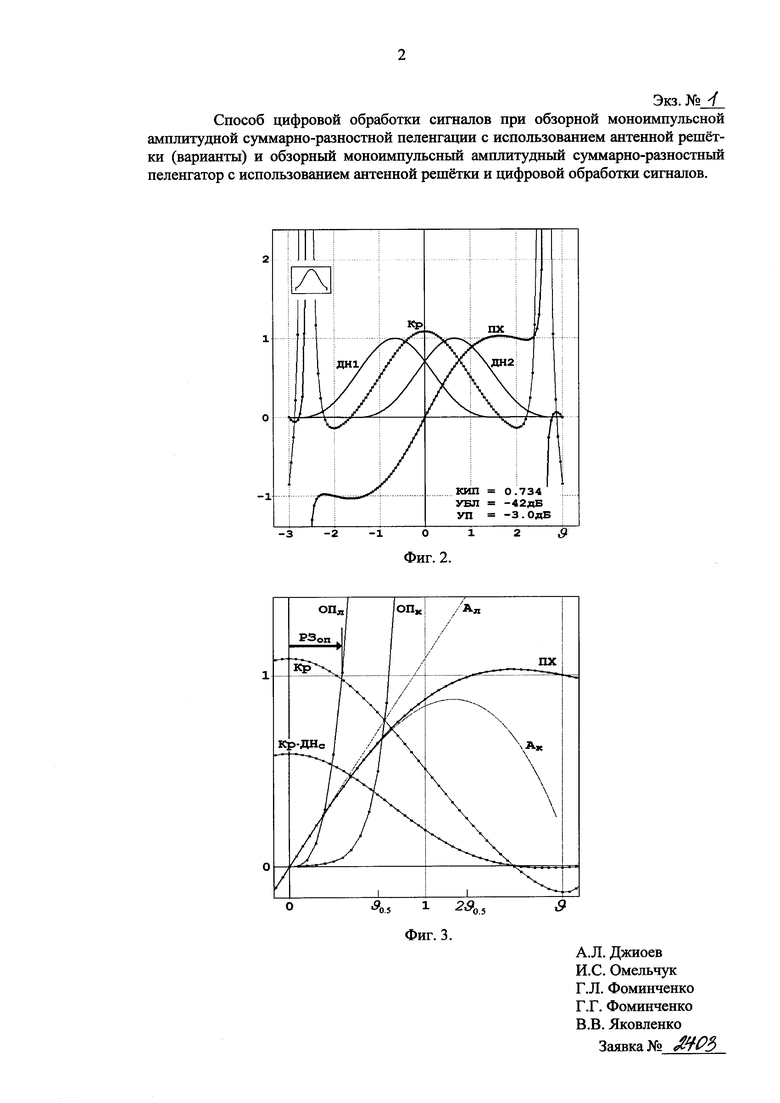
фигура 2 - парциальные ДН, соответствующая им ПХ и крутизна (Кр) пеленгационной характеристики для общепринятого угла смещения ϑ0=ϑ0.5 и косинус-квадратного на пьедестале 0,08 амплитудного распределения на раскрыве антенной решетки, соответствующего функции Хэмминга вида w(x)=0.08+0.92cos2(πх/2), -1≤х≤1;
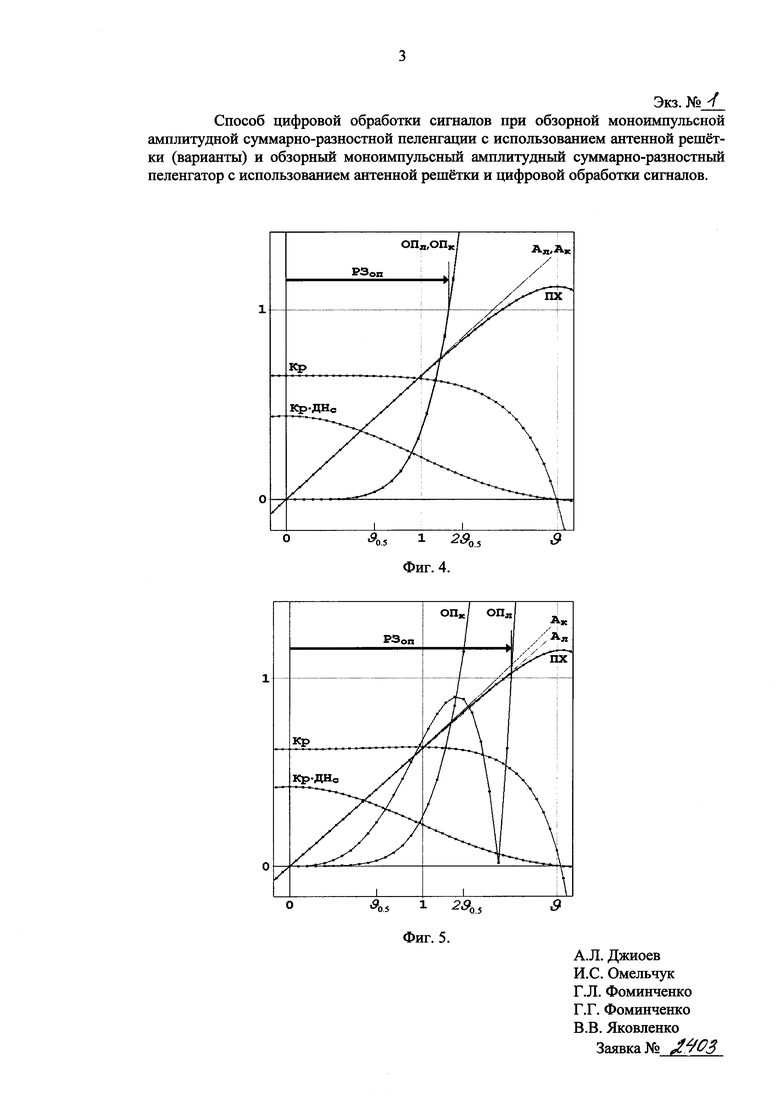
фигура 3 - характеристики пеленгатора для того же амплитудного распределения в виде функции Хэмминга w(x)=0.08+0.92cos2(πх/2), -1≤х≤1 при общепринятом угле смещения ϑ0=ϑ0.5, равном полуширине ДН парциального канала на уровне минус 3 дБ: сама ПХ, ее крутизна, линейная (Ал) и кубическая (Ак) аппроксимации ПХ усеченным рядом Маклорена, ошибка пеленгования для этих аппроксимаций (ОПл и ОПк) в процентах от ширины ДН, произведение Кр×ДНс (здесь ДНс - это уровень суммарной ДН); горизонтальными стрелками на фигурах 3-6 показана рабочая зона1(1Область углов, в которой ошибка пеленгования вследствие отличия ПХ от линейной или кубической функции не превышает заданной величины.) ϑ=0…ϑРЗ при ошибке пеленгования (РЗоп), не превосходящей 1% ширины ДН парциального канала;
фигура 4 - характеристики пеленгатора для того же амплитудного распределения (в виде функции Хэмминга) после определения предварительного значения угла смещения  где λ - длина волны, d - период решетки, N - число ее элементов) с целью получения линейной ПХ (с отклонением в пятом порядке разложения): сама ПХ, ее крутизна, линейная аппроксимация (Ал) пеленгационной характеристики усеченным рядом Маклорена, ошибка пеленгования для этой аппроксимации (ОПл) в процентах ширины ДН парциального канала, произведение Кр×ДНс.;
где λ - длина волны, d - период решетки, N - число ее элементов) с целью получения линейной ПХ (с отклонением в пятом порядке разложения): сама ПХ, ее крутизна, линейная аппроксимация (Ал) пеленгационной характеристики усеченным рядом Маклорена, ошибка пеленгования для этой аппроксимации (ОПл) в процентах ширины ДН парциального канала, произведение Кр×ДНс.;
фигура 5 - характеристики пеленгатора согласно пункту 1 формулы изобретения, для того же случая после определения окончательного значения угла смещения путем его оптимизации с целью обеспечения максимальной рабочей зоны пеленгатора 
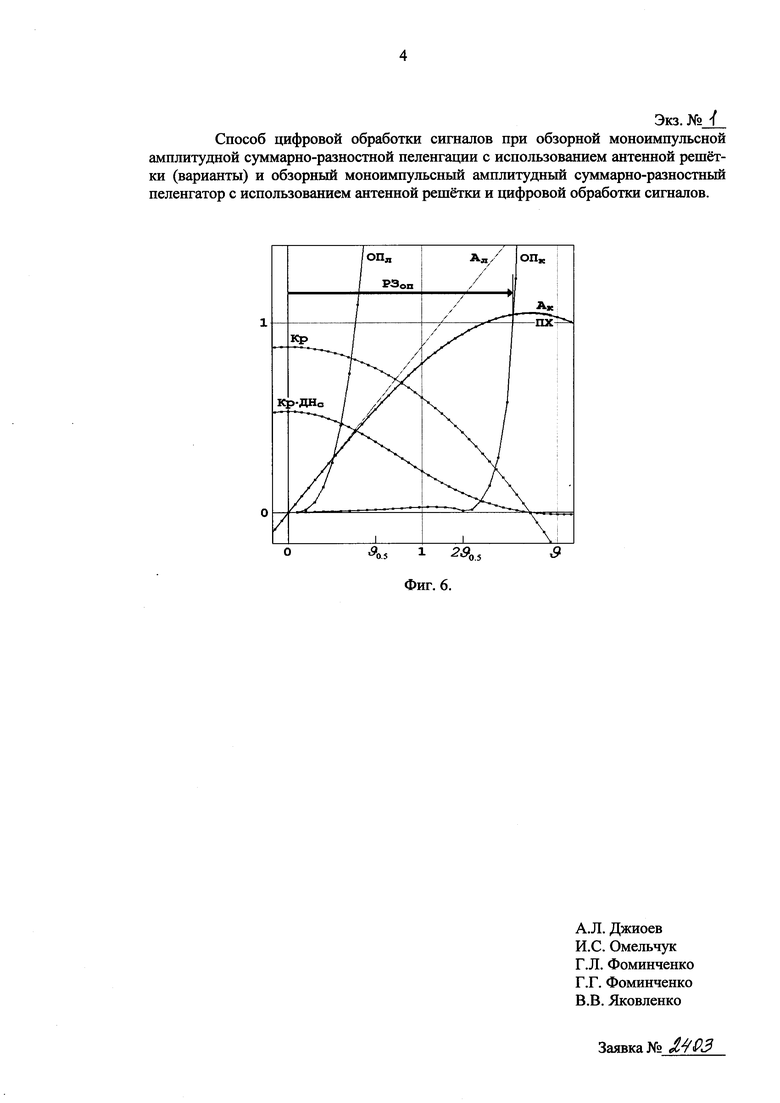
фигура 6 - характеристики пеленгатора согласно пункту 2 формулы изобретения, для того же амплитудного распределения после определения окончательного значения угла смещения  с целью получения кубической ПХ: сама ПХ, ее крутизна, кубическая аппроксимация ПХ (Ак) усеченным рядом Маклорена, ошибка пеленгования для этой аппроксимации (ОПк) в % ширины ДН парциального канала, произведение Кр×ДНс..
с целью получения кубической ПХ: сама ПХ, ее крутизна, кубическая аппроксимация ПХ (Ак) усеченным рядом Маклорена, ошибка пеленгования для этой аппроксимации (ОПк) в % ширины ДН парциального канала, произведение Кр×ДНс..
При реализации предложенного первого способа выполняется следующая последовательность операций:
- до приема сигналов осуществляют моделирование процесса их приема и обработки, при котором выбирают весовую функцию на раскрыве антенной решетки с числом элементов N и периодом d, например, функцию Хэмминга w(х)=0.08+0.92cos2(πх/2), -1≤х≤1, обеспечивающую уровень боковых лепестков не выше минус 40 дБ и, с учетом далее определяемого значения угла смещения ϑ0, ширину рабочей зоны пеленгации не менее двукратной ширины диаграммы направленности парциального канала по уровню половинной мощности (по уровню минус 3 дБ), или другую весовую функцию, обеспечивающую не более высокий, чем функция Хэмминга, уровень боковых лепестков и не меньшую ширину рабочей зоны; затем вычисляют амплитуды возбуждения антенных элементов как 
- продолжая моделирование и используя эти амплитуды, определяют вид парциальных ДН F1(ϑ)=F(ϑ-ϑ0) и F2(ϑ)=F(ϑ+ϑ0), максимумы которых отстоят от равносигнального направления на угол ϑ0;
- по этим ДН строят модельную ПХ в виде функции

параметрически зависящей от угла ϑ0, и, учитывая нечетность ПХ относительно РСН, разлагают ее по нечетным степеням угла ϑ в ряд Маклорена
коэффициенты bk (ϑ0) которого являются функциями угла смещения ϑ0;
- определяют предварительное значение угла смещения ϑ0 как результат решения задачи b3(ϑ0)=0, обеспечивающее линейность пеленгационной характеристики с точностью до членов разложения 5-го порядка;
- вычисляют окончательное значение угла смещения ϑ0 как результат решения задачи ϑP3(ϑ0)→max, обеспечивающее максимальное значение ширины ϑРЗ(ϑ0)≡ϑРЗ(ϑ0,εmах) рабочей зоны (-ϑРЗ(ϑ0)≤ϑ≤ϑРЗ(ϑ0)), в которой текущая ошибка измерения угла ϑ не превышает максимальной ошибки εmах, которая, в свою очередь, задана не превышающей, например, 0,01 ширины ДН парциального канала по уровню половинной мощности;
- по полученному окончательному значению угла смещения ϑ0 вычисляют значение коэффициента b1(ϑ0), затем использованную при моделировании ВФ и окончательное значение угла смещения используют при формировании ДН парциальных каналов;
- принимают сигнал ИРИ антенными элементами углового датчика, оцифровывают выходные сигналы каждого элемента ФАР и умножают сигнал каждого i-го элемента на вычисленную амплитуду wi; сдвигают фазу каждого i-го элемента на величину  (или вводят эквивалентную временную задержку) с целью формирования двух диаграмм F1(ϑ)=--F(ϑ-ϑ0) и F2(ϑ)=F(ϑ+ϑ0) соответственно знаку сдвига фазы;
(или вводят эквивалентную временную задержку) с целью формирования двух диаграмм F1(ϑ)=--F(ϑ-ϑ0) и F2(ϑ)=F(ϑ+ϑ0) соответственно знаку сдвига фазы;
- суммируют сигналы элементов и измеряют уровни двух сигналов U1 и U2, принятых двумя парциальными диаграммами F1(ϑ) и F2(ϑ), оси которых разнесены на угол 2ϑ0, затем вычисляют значение UКК сигнала компенсационного канала и, в случае |U1|>|UKK| и |U2|>|UKK|, вычисляют сигнал рассогласования  в противном случае считают, что в данной рабочей зоне ИРИ отсутствует;
в противном случае считают, что в данной рабочей зоне ИРИ отсутствует;
- вычисляют угол ϑ прихода сигнала (пеленг ИРИ) по формуле  как результат решения линейного уравнения b1(ϑ0)ϑ=SСР.
как результат решения линейного уравнения b1(ϑ0)ϑ=SСР.
Покажем возможность повышения скорости и точности измерения угла ϑ за счет увеличения размера линейного участка ПХ. Отметим, что ПХ (1) в общем случае не линейна, т.к. является нелинейной комбинацией нелинейных функций; в соответствии с третьим постулатом моноимпульсного метода [Родс Д.Р. Введение в моноимпульсную радиолокацию. - М.: Сов. радио, 1960, 160 с.], ПХ является нечетной функцией угла ϑ и, следовательно, может быть разложена в ряд Маклорена по нечетным степеням этого угла. В окрестности нуля (т.е. РСН) она аппроксимируется первым ненулевым членом ряда - линейной функцией

где угловой коэффициент µ=b1(ϑ0), в общем случае зависящий от угла смещения, характеризует крутизну ПХ.
Отклонение ПХ (1) от аппроксимации (2), имеющее вид
δS=S(ϑ,ϑ0)-µϑ,
приводит к ошибке определения угла ϑ

в общем случае зависящей от угла смещения ϑ0. При его фиксированном значении характер зависимости величин δS и δϑ от ϑ определяется первым ненулевым нелинейным членом ряда Маклорена, т.е. эти величины растут как куб или более высокая нечетная степень угла ϑ. В таком случае ошибка определения угла ϑ, возникающая вследствие отклонения ПХ от линейной аппроксимирующей функции (2) в точке ϑ углового положения цели, может быть существенно уменьшена, если при повторном вычислении направления ϑ на цель использовать предыдущую оценку угла ϑ в качестве РСН (нового начала координат) - именно так производят измерение пеленга «обычным» способом по серии принятых сигналов.
Последовательность уточнений при «обычном» расчете можно представить как итерационный процесс, на каждом шаге которого требуется повторно вычислять приемные ДН и значения ПХ для нового РСН, еще раз принимая сигнал (в РЛС - излучая импульс). Это требует дополнительного времени и аппаратной поддержки, реализующей обратную связь. Длительность одной итерации зависит от объема задействованной в ней аппаратуры. При решении нелинейного пеленгационного уравнения для единственного принятого сигнала вычисления ограничиваются использованием процессора и оперативной памяти, тогда как для измерения значения SCP для нового РСН требуется задействовать всю аппаратуру, обрабатывающую сигнал в антенной решетке. Следовательно, для повышения скорости и точности измерений следует отказаться от перерасчетов SСР для новых РСН и обрабатывать единственный принятый сигнал. Этот путь требует использования ПХ (в явном виде или аппроксимации) и наиболее эффективен при линейности ПХ. Таким образом, итераций и связанных с ними затрат времени и усложнения аппаратуры можно избежать, если обеспечить в соотношении (1) линейную зависимость ПХ от угла ϑ.
Как известно из литературы [Родс Д.Р. Введение в моноимпульсную радиолокацию. - М.: Сов. радио, 1960, 160 с.], строго линейная ПХ, учитывая работы Керра и Мурдока, может быть получена при амплитудном распределении, являющемся неотрицательной степенью полупериода косинусоиды, и угле смещения

где λ - длина волны;
d - период антенной решетки;
N - число элементов антенной решетки.
Однако это распределение и значение угла смещения обычно не используется; принято использовать, как и в прототипе, угол смещения ϑ0=ϑ0.5, равный полуширине парциальной ДН на уровне половинной мощности. Простой, понятный и удобный для инженерного использования критерий ϑ0=ϑ0.5 обеспечивает близость угла смещения к классическому оптимальному значению, максимизирующему произведение коэффициента направленного действия (уровня суммарной диаграммы) и крутизны разностной диаграммы на РСН [Родс Д.Р. Введение в моноимпульсную радиолокацию. - М.: Сов. радио, 1960, 160 с.]. Это важно для следящего пеленгатора, но для обзорного пеленгатора, как показано ниже, это не очевидно.
Для упомянутого общепринятого угла смещения ϑ0=ϑ0.5 на фигуре 2 показаны парциальные ДН, вычисленная по ним ПХ и крутизна (Кр) ПХ при косинус-квадратном амплитудном распределении на пьедестале 0,08, что соответствует функции Хэмминга вида w(x)=0.08+0.92cos2(πx/2), -1≤х≤1. График амплитудного распределения на раскрыве антенной решетки показан в верхнем левом углу, в правом нижнем углу приведены значения коэффициента использования поверхности (КИП), уровня боковых лепестков (УБЛ) и уровня пересечения (УП) ДН. Для независимости изложения от конкретных значений длины волны и размера раскрыва ФАР всюду за единицу измерения углов принят угол  соответствующий первому нулю ДН при равномерном амплитудном распределении. Соответственно на фигуре 2 по оси абсцисс единицей измерения угла ϑ является величина ϑ1, а по оси ординат единицей измерения крутизны ПХ является величина, обратная ϑ1. По оси ординат парциальные ДН нормированы к единице. Видно, что в данном случае обеспечен низкий УБЛ (минус 42 дБ), но ПХ является нелинейной, и это не позволяет (см. фигуру 3) получить широкую рабочую зону пеленгации при повышенных быстродействии и точности.
соответствующий первому нулю ДН при равномерном амплитудном распределении. Соответственно на фигуре 2 по оси абсцисс единицей измерения угла ϑ является величина ϑ1, а по оси ординат единицей измерения крутизны ПХ является величина, обратная ϑ1. По оси ординат парциальные ДН нормированы к единице. Видно, что в данном случае обеспечен низкий УБЛ (минус 42 дБ), но ПХ является нелинейной, и это не позволяет (см. фигуру 3) получить широкую рабочую зону пеленгации при повышенных быстродействии и точности.
Размер рабочей зоны ϑРЗ, соответствующей ошибке пеленгования 1% ширины ДН парциального канала (РЗоп), и другие характеристики пеленгации показаны на фигуре 3 для того же амплитудного распределения на раскрыве, что и на фигуре 2. На фигурах 3-6 рабочая зона ϑ=0…ϑРЗ показана горизонтальной стрелкой; в этой области углов ошибка пеленгования, возникающая из-за отклонения используемой аппроксимации ПХ от самой ПХ, не превышает 1% ширины парциальной ДН по уровню минус 3 дБ. Через Ал и Ак обозначены линейная и кубическая аппроксимации ПХ, полученные усечением ряда Маклорена, а ОПл и ОПк - ошибка пеленгования для этих аппроксимаций. Отметим, что на фигурах 3-6 показаны увеличенные в 100 раз (чтобы «1» на оси ординат соответствовала 1%) графики величины ошибки пеленгования, ниже используемой в левой части уравнения (6). Видно, что на фигуре 3, соответствующей общепринятому случаю ϑ0=ϑ0,5, рабочая зона по упомянутому 1%-му критерию составляет малую часть ширины ДН парциального канала. Рассмотрим возможность ее увеличения.
Так как ПХ является плавной нечетной функцией угла ϑ, то в окрестности нуля наибольший вклад в отклонение ПХ от линейной функции вносит кубический член ряда Маклорена с коэффициентом
Потребовав равенства его нулю, мы уменьшим отклонение ПХ от линейной функции и увеличим размер области, внутри которой отклонения от линейности малы. Соответствующий угол смещения ϑ0 можно искать как решение уравнения

Численно решая задачу (5) для амплитудного распределения на раскрыве АР в виде функции Хэмминга, получаем, что b3(ϑ0)≈0 при угле ϑ0=ϑ0 лин 1≈0,406, где за единицу принят угол ϑ1. Этот угол обеспечивает для данного распределения максимальную точность определения УК при использованном нами способе линеаризации пеленгационного уравнения путем усечения ряда Маклорена. Результат линеаризации ПХ для того же амплитудного распределения на раскрыве (в виде функции Хэмминга), что и на фигуре 3, показан на фигуре 4. Видно, что здесь обеспечена практически линейная ПХ в существенно более широкой рабочей зоне пеленгации.
В то же время можно заметить, что на фигуре 4 ошибка пеленгования при линейной аппроксимации (график ОПл) монотонно возрастает с ростом ϑ; это означает, что ПХ в рабочей зоне отклоняется от аппроксимирующей ее линейной функции только в одну сторону. Если допустить возможность отклонения ПХ в любую сторону, лишь бы абсолютное значение ошибки пеленгования не превышало определенный выше однопроцентный порог, то можно увеличить размер ϑРЗ рабочей зоны. Он равен минимальному по абсолютной величине корню уравнения

где ошибка пеленгования δϑ как функция угла ϑ и параметра ϑ0 определена выше формулой (3). Решая задачу
ϑРЗ(ϑ0)→max,
в которой при текущем значении параметра ϑ0 необходимо в качестве подзадачи решить уравнение (6), получаем значение угла ϑ0=ϑ0 лин 2≈0,387. Построив соответствующие ему графики (фигура 5), можно увидеть, что размер рабочей зоны увеличился по сравнению с показанной на фигуре 4. Все это отражено в пункте 1 формулы изобретения.
При реализации предложенного второго способа выполняется следующая последовательность операций:
- до приема сигналов осуществляют моделирование процесса их приема и обработки, при котором выбирают ВФ на раскрыве АР с числом элементов N и периодом d, например, функцию Хэмминга w(x)=0.08+0.92cos2(πx/2), -1≤x≤1, обеспечивающую уровень боковых лепестков не выше минус 40 дБ и, с учетом далее определяемого значения угла смещения ϑ0, ширину рабочей зоны пеленгации не менее двукратной ширины диаграммы направленности парциального канала по уровню половинной мощности, или другую весовую функцию, обеспечивающую не более высокий, чем функция Хэмминга, уровень боковых лепестков и не меньшую ширину рабочей зоны; затем вычисляют амплитуды возбуждения антенных элементов как
- в процессе моделирования с использованием этих амплитуд определяют на основе весовой функции и параметров АР конкретный вид функциональной зависимости от угла ϑ парциальных ДН Fx(ϑ)≡F(ϑ-ϑ0) и F2(ϑ)≡F(ϑ+ϑ0), максимумы которых симметрично отстоят на угол ϑ0 от равносигнального направления;
- по этим ДН строят модельную ПХ в виде функции (1), параметрически зависящей от угла ϑ0, и, учитывая нечетность ПХ, разлагают эту функцию по нечетным степеням угла ϑ в ряд Маклорена
коэффициенты bk(ϑ0) которого являются функциями угла смещения ϑ0;
- определяют окончательное значение этого угла как результат решения задачи b5(ϑ0)=0, обеспечивающее соответствие пеленгационной характеристики кубической функции с отклонением только в 7-м и более высоких порядках разложения, далее по полученному значению угла смещения вычисляют значения коэффициентов b1(ϑ0) и b3(ϑ0), затем использованную весовую функцию и полученное значение угла смещения ϑ0 используют при формировании диаграмм направленности антенной решетки;
- принимают сигнал ИРИ антенными элементами углового датчика, оцифровывают выходные сигналы каждого элемента антенной решетки и умножают сигнал каждого i-гo элемента на вычисленную амплитуду wt; сдвигают фазу каждого i-го элемента на величину  (или вводят эквивалентную временную задержку) с целью формирования двух диаграмм F1(ϑ)≡F(ϑ-ϑ0) и F2(ϑ)≡F(ϑ+ϑ0) соответственно знаку сдвига фазы;
(или вводят эквивалентную временную задержку) с целью формирования двух диаграмм F1(ϑ)≡F(ϑ-ϑ0) и F2(ϑ)≡F(ϑ+ϑ0) соответственно знаку сдвига фазы;
- суммируют сигналы элементов каналов и измеряют уровни двух сигналов U1 и U2, принятых двумя парциальными ДН F1(ϑ) и F2(ϑ), оси которых разнесены на угол 2ϑ0, затем вычисляют значение UKK сигнала компенсационного канала и, в случае |U1|>|UKK| и |U2|>|UKK|, вычисляют значение  в противном случае считают, что в данной рабочей зоне ИРИ отсутствует;
в противном случае считают, что в данной рабочей зоне ИРИ отсутствует;
- определяют угол прихода сигнала ϑ источника радиоизлучения (его пеленг) как минимальное по абсолютной величине действительное решение кубического уравнения b1(ϑ0)ϑ+b3(ϑ0)ϑ3=SСР, полученное по формулам Кардано.
При линейной аппроксимации ПХ угловая координата цели вычисляется аналитически как решение уравнения 1-го порядка, однако аналитически решаются алгебраические уравнения до 4-го порядка включительно. Следовательно, при аппроксимации ПХ полиномом 3-го порядка возможно аналитическое решение пеленгационного уравнения с использованием решения Тартальи-Кардано. Для получения кубической аппроксимации потребуем, аналогично (5), нулевого значения коэффициента 5-го порядка ряда Маклорена

где 
Решая задачу (7) численно, получаем угол смещения ϑ0=ϑ0 куб≈0,533.
Характеристики пеленгатора для этого случая показаны на фигуре 6. Видно, что здесь обеспечена такая же широкая рабочая зона пеленгации, как и на фигуре 5. Кубический вариант аппроксимации ПХ отражен в пункте 3 формулы изобретения.
Результаты проведенного моделирования показали, что предлагаемые способы позволяют за счет специального выбора значения угла разноса парциальных ДН в моноимпульсной группе лучей и ВФ в виде функции Хэмминга обеспечить расширение в 4,3 раза рабочей зоны, то есть области линейности (или кубичности) ПХ с ошибкой пеленгования (из-за отклонения используемой аппроксимации ПХ от самой ПХ), не превышающей 1% ширины парциальной ДН по уровню минус 3 дБ. Этот результат позволяет при высоком отношении сигнал/шум определить направление на ИРИ с указанной точностью по одному принятому сигналу и повысить скорость измерения УК не менее чем в 3 раза (за счет исключения повторных приемов сигнала), а также получить приращение уровня сигнала в РСН на 2 дБ.
Примером реализации предложенных способов является обзорный моноимпульсный амплитудный суммарно-разностный пеленгатор с использованием антенной решетки и цифровой обработки сигналов, схема электрическая структурная которого приведена на фигуре 1, где приняты следующие обозначения:
1 - блок антенных элементов (БАЭ) антенной решетки;
2 - блок многоканального радиоприемного устройства (БМРПУ);
3 - блок аналого-цифровых преобразователей (БАЦП);
4 - блок умножителей (БУ) отсчетов сигналов с выходов АЦП на отсчеты ВФ;
5 - диаграммообразующее устройство (ДОУ), формирующее диаграммы F1, F2 парциальных каналов и Fkk компенсационного канала;
6 - блок согласованных фильтров (БСФ);
7 - блок селекции (БС);
8 - измеритель сигнала SСР углового рассогласования (ИСУР), являющегося значением ПХ;
9 - устройство управления (УУ);
10 - синтезатор частот (СЧ);
11 - блок обнаружения и измерения параметров сигналов (БОИПС);
12 - запоминающее устройство значений весовой функции (ЗУЗВФ);
13 - вычислитель видов функциональных зависимостей (ВВФЗ), описывающих ДН парциальных каналов и пеленгационную характеристику;
14 - вычислитель коэффициентов разложения функции, описывающей ПХ (ВКРПХ), в ряд Маклорена;
15 - вычислитель значения угла смещения ϑ0 (ВЗУС) максимумов ДН парциальных каналов от РСН;
16 - вычислитель окончательных значений коэффициентов разложения (ВОЗКР) функции, описывающей ПХ;
17 - вычислитель пеленга (ВП).
Обзорный моноимпульсный амплитудный суммарно-разностный пеленгатор с использованием антенной решетки и цифровой обработки сигналов, реализующий предложенные способы, содержит последовательно соединенные БАЭ 1, БМРПУ 2, БАЦП 3, БУ 4, ДОУ 5, БСФ 6, БС 7, ИСУР 8 и УУ 9, причем первый, второй, третий и четвертый управляющие выходы УУ 9 подключены соответственно к входу управления БМРПУ 2, входу управления СЧ 10, первому входу управления ДОУ 5 и входу управления БОИПС 11, гетеродинный выход СЧ 10 подключен к одноименному входу БМРПУ 2, а выход дискретизации СЧ 10 - к одноименному входу БАЦП 3, при этом выход компенсационного канала ДОУ 5 соединен с одноименным входом БСФ 6, а выходы U1 и U2 парциальных каналов ДОУ 5 соединены с одноименными входами БСФ 6 и БОИПС 11, выход параметров которого подключен к одноименным входам БСФ 6 и УУ 9.
Согласно изобретению в него дополнительно введены последовательно соединенные ЗУЗВФ 12, ВВФЗ 13, ВКРПХ 14, ВЗУС 15, ВОЗКР 16 и ВП 17, причем выход ЗУЗВФ 12 соединен через УУ 9 с входом управления БУ 4, а вход управления ЗУЗВФ 12 - с выходом управления ВВФЗ 13, выход ВВФЗ 13 соединен через ВКРПХ 14 со входом ВЗУС 15 и вторым входом ВОЗКР 16, выход ВЗУС 15 подключен к первому входу ВОЗКР 16, а через УУ 9 - ко второму входу управления ДОУ 5, вход данных ВЗУС 15 соединен с седьмым выходом УУ 9, выход ВОЗКР 16 подключен к первому входу ВП 17, второй вход ВП 17 соединен через УУ 9 с выходом ИСУР 8, а входы данных и управления ВВФЗ 13 подключены к пятому и шестому выходам УУ 9.
Обзорный моноимпульсный пеленгатор работает следующим образом. После получения от вышестоящей системы команды на начало работы (поиск и обнаружение сигналов ИРИ в заданном частотном диапазоне и секторе углов с последующим определением их УК) в УУ 9 формируются:
- коды настройки гетеродина БМРПУ 2 на заданные частоты, которые через второй управляющий выход УУ 9 передаются в СЧ 10;
- текущие УК равносигнального направления ϑРСН для поиска сигналов в заданном подсекторе (рабочей зоне) сектора Δϑп углов, которые через третий управляющий выход УУ 9 передаются в ДОУ 5;
- задание на проведение моделирования процесса приема и обработки сигналов ИРИ, которые через шестой управляющий выход УУ 9 передаются в ВВФЗ 13 и соединенные с ним ВКРПХ 14, ВЗУС 15 и ВОЗКР 16.
Далее, используя значения выбранной ВФ для антенных элементов, хранящиеся в ЗУЗВФ 12, и данные о параметрах антенной решетки (числе элементов N, периоде решетки d и длине волны λ), в ВВФЗ 13 определяют вид функций, описывающих зависимости от углов ϑ и ϑ0 диаграмм направленности пеленгационных каналов F1(ϑ)≡F(ϑ-ϑ0) и F2(ϑ)≡F(ϑ+ϑ0) и пеленгационной характеристики  углового дискриминатора. ВКРПХ 14 осуществляет разложение функции, описывающей ПХ, по нечетным степеням угла ϑ в ряд Маклорена
углового дискриминатора. ВКРПХ 14 осуществляет разложение функции, описывающей ПХ, по нечетным степеням угла ϑ в ряд Маклорена
коэффициенты bk(ϑ0) которого являются функциями угла смещения ϑ0.
После этого в ВЗУС 15 вычисляют значение угла смещения ϑ0 следующим образом:
а) в случае линейной аппроксимации ПХ (по первому способу изобретения) - сначала вычисляют предварительное значение как результат решения задачи b3(ϑ0)=0; затем задают функцию  являющуюся ошибкой пеленгования, и максимальную ошибку пеленгования ε=0,01 относительно ширины ДН, после чего определяют функцию ϑРЗ(ϑ0), равную минимальному по абсолютной величине корню ϑ уравнения
являющуюся ошибкой пеленгования, и максимальную ошибку пеленгования ε=0,01 относительно ширины ДН, после чего определяют функцию ϑРЗ(ϑ0), равную минимальному по абсолютной величине корню ϑ уравнения  и вычисляют окончательное значение угла ϑ0 как решение задачи ϑРЗ(ϑ0)→max, обеспечивающей максимизацию размера рабочей зоны, в которой остаточная ошибка пеленгования из-за отклонения используемой аппроксимации ПХ от самой ПХ не превышает 1% ширины парциальной ДН по уровню минус 3 дБ;
и вычисляют окончательное значение угла ϑ0 как решение задачи ϑРЗ(ϑ0)→max, обеспечивающей максимизацию размера рабочей зоны, в которой остаточная ошибка пеленгования из-за отклонения используемой аппроксимации ПХ от самой ПХ не превышает 1% ширины парциальной ДН по уровню минус 3 дБ;
б) в случае кубической аппроксимации ПХ (по второму способу изобретения) - как результат решения задачи b5 (ϑ0)=0; это значение ϑ0 является окончательным.
Вычисленное значение угла смещения ϑ0 передают в УУ 9 и ВОЗКР 16, в котором рассчитывают значения коэффициентов b1(ϑ0), и во втором способе b3(ϑ0), соответствующие полученным значениям угла ϑ0.
После завершения процесса моделирования осуществляют настройку пеленгатора, обеспечив с использованием вычисленного в процессе моделирования значения угла ϑ0 формирование двух парциальных ДН F1(ϑ)=F(ϑ-ϑ0) и F2(ϑ)=F(ϑ+ϑ0), а также сдвиг фазы (или соответствующую временную задержку) в каждом i-м элементе на величину 
Далее осуществляют прием сигналов ИРИ с помощью БАЭ 1, их усиление и преобразование по частоте в БМРПУ 2 с использованием сигнала гетеродина fГ, формируемого в СЧ 10, аналого-цифровое преобразование этих сигналов в БАЦП 3 с использованием сигнала дискретизации fД, формируемого также в СЧ 10, умножение в БУ 4 отсчетов сигнала на значения ВФ, поступающие из ЗУЗВФ 12, после формирования в ДОУ 5 парциальных ДН и получения на выходах ДОУ 5 (после суммирования) двух сигналов U1 и U2, принятых по двум парциальным ДН, оси которых разнесены на угол 2ϑ0, и сигнала UKK компенсационного канала, осуществляют в БОИПС 11 поиск сигналов ИРИ в заданном угловом секторе ΔϑП, а также обнаружение и измерение параметров сигналов (несущих частот fci и ширины спектра Δfci); в УУ 9 выбирают сигналы, подлежащие пеленгованию, в БСФ 6 на основе данных о параметрах сигналов осуществляют формирование частотных характеристик согласованных фильтров и фильтрацию сигналов, в БС 7 селектируют те из них, уровни которых одновременно превышают уровень сигнала компенсационного канала. Затем, в случае |U1|>|UKK| и |U2|>|UKK|, в ИСУР 8 вычисляют отношение  являющееся значением ПХ углового дискриминатора; в противном случае считают, что ИРИ в данном секторе отсутствует.
являющееся значением ПХ углового дискриминатора; в противном случае считают, что ИРИ в данном секторе отсутствует.
Наконец, используя полученное значение SCP и вычисленные значения коэффициентов bк(ϑ0), в ВП 17 вычисляют угол прихода сигнала  как результат решения линейного уравнения b1(ϑ0)ϑC=SCP (по первому способу) или кубического уравнения
как результат решения линейного уравнения b1(ϑ0)ϑC=SCP (по первому способу) или кубического уравнения  по формулам Кардано (по второму способу), используя минимальный по абсолютной величине действительный корень этого уравнения. Пеленг ϑС формируется на выходе ВП 17.
по формулам Кардано (по второму способу), используя минимальный по абсолютной величине действительный корень этого уравнения. Пеленг ϑС формируется на выходе ВП 17.
В Ростовском-на-Дону НИИ радиосвязи проведено компьютерное моделирование предлагаемых способов цифровой обработки сигналов и осуществлена проверка их работоспособности на макете пеленгатора. Реализация предложенных способов и обзорного моноимпульсного пеленгатора не встречает затруднений при современном уровне развития устройств цифровой обработки сигналов. Возможность реализации данного способа обеспечивает ему критерий «промышленная применимость». По сравнению с прототипом (где ϑ0=ϑ0.5) получен следующий технико-экономический эффект:
- повышена не менее чем в 3 раза скорость измерения угловой координаты ИРИ;
- повышена до величины 1% от ширины ДН парциального канала точность измерения угловой координаты в рабочей зоне при высоком отношении сигнал/шум;
- увеличена более чем в 4 раза ширина рабочей зоны обзорного пеленгатора, в результате чего она перекрывает всю ширину моноимпульсной группы лучей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ одновременного измерения двух угловых координат цели в обзорной амплитудной моноимпульсной радиолокационной системе с антенной решеткой и цифровой обработкой сигнала | 2015 |
|
RU2615491C1 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| Способ повышения точности определения угла пеленга цели при сохранении взаимозаменяемости антенны в составе системы | 2019 |
|
RU2731879C1 |
| Способ определения направления на цель цифровой антенной решеткой моноимпульсной радиолокационной станции | 2021 |
|
RU2761106C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ | 2011 |
|
RU2455658C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ И НАЛИЧИИ ОШИБОК КАЛИБРОВКИ ПРИЕМНЫХ КАНАЛОВ | 2011 |
|
RU2456631C1 |
| Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов | 2019 |
|
RU2713498C1 |
Изобретение относится к области радиотехники и может быть применено в системах моноимпульсной радиолокации и радиопеленгации, использующих антенную решетку и цифровую обработку сигналов. Достигаемый технический результат изобретения - повышение точностных характеристик и быстродействия, вплоть до определения угла прихода сигнала по единственной его реализации. Для достижения технического результата по первому варианту способа, до приема сигналов осуществляют моделирование процесса их приема и обработки, при котором используют весовую функцию Хэмминга, обеспечивающую соответствующий уровень боковых лепестков и далее определяемого значения угла смещения, ширину рабочей зоны пеленгации не менее двукратной ширины диаграммы направленности парциального канала по уровню половинной мощности, в процессе моделирования определяют на основе весовой функции и параметров антенной решетки конкретный вид функций, параметрически зависящих от угла смещения, разлагают нечетную функцию, описывающую пеленгационную характеристику, по нечетным степеням текущего угла в ряд Маклорена, определяют предварительное значение угла смещения, вычисляют окончательное значение угла смещения, использованную при моделировании весовую функцию и определенное в результате моделирования значение угла смещения используют при формировании диаграмм направленности антенной решетки, получают значение сигнала рассогласования и вычисляют значение угла прихода сигнала источника радиоизлучения соответствующим образом. Для достижения технического результата по второму варианту определяют окончательное значение угла смещения как результат решения задачи, обеспечивающий соответствие пеленгационной характеристики кубической функции с отклонением только в седьмом и более высоких порядках разложения, далее использованную при моделировании весовую функцию и определенное в результате моделирования значение угла смещения используют при формировании диаграмм направленности антенной решетки, приеме и обработке сигнала, получая значение сигнала рассогласования, после чего вычисляют значение угла прихода сигнала источника радиоизлучения определенным образом. Примером реализации способов по первому и второму вариантам является обзорный моноимпульсный амплитудный суммарно-разностный пеленгатор с использованием антенной решетки и цифровой обработки сигналов, выполненный определенным образом. 3 н.п. ф-лы, 6 ил.
1. Способ цифровой обработки сигналов при обзорной моноимпульсной амплитудной суммарно-разностной пеленгации с использованием антенной решетки, при котором в соответствии с весовой функцией, описывающей распределение поля в раскрыве антенной решетки и обеспечивающей заданный уровень боковых лепестков, формируют диаграммы направленности F1(ϑ)=F(ϑ-ϑ0) и F2(ϑ)=F(ϑ+ϑ0) парциальных каналов приема углового датчика, где ϑ - текущий угол, отсчитываемый от равносигнального направления, причем максимумы этих диаграмм отстоят в каждую сторону от равносигнального направления на угол смещения ϑ0, а также сопряженную с ними диаграмму направленности компенсационного канала, обеспечивающую определенное превышение усиления этого канала над усилением по боковым лепесткам диаграмм направленности парциальных каналов, принимают сигналы источников радиоизлучений, осуществляют их аналого-цифровое преобразование, на выходах парциальных каналов обнаруживают сигналы с уровнями соответственно U1 и U2 и измеряют их параметры, селектируют из потоков этих сигналов те из них, уровни которых одновременно превышают уровень сигнала компенсационного канала, вычисляют сигнал рассогласования  , являющийся значением пеленгационной характеристики
, являющийся значением пеленгационной характеристики  углового дискриминатора, и по значению SCP находят значение угла ϑ прихода сигнала источника радиоизлучения - пеленг, отличающийся тем, что до приема сигналов осуществляют моделирование процесса их приема и обработки, при котором используют весовую функцию Хэмминга w(x)=0.08+0.92cos2(πx/2), -1≤x≤1, обеспечивающую уровень боковых лепестков не выше минус 40 дБ и, с учетом далее определяемого значения угла смещения ϑ0, ширину рабочей зоны пеленгации не менее двукратной ширины диаграммы направленности парциального канала по уровню половинной мощности, в процессе моделирования определяют на основе весовой функции и параметров антенной решетки конкретный вид функций F1(ϑ), F2(ϑ) и S(ϑ,ϑ0), параметрически зависящих от угла смещения ϑ0, разлагают нечетную функцию S(ϑ,ϑ0), описывающую пеленгационную характеристику, по нечетным степеням угла ϑ в ряд Маклорена
углового дискриминатора, и по значению SCP находят значение угла ϑ прихода сигнала источника радиоизлучения - пеленг, отличающийся тем, что до приема сигналов осуществляют моделирование процесса их приема и обработки, при котором используют весовую функцию Хэмминга w(x)=0.08+0.92cos2(πx/2), -1≤x≤1, обеспечивающую уровень боковых лепестков не выше минус 40 дБ и, с учетом далее определяемого значения угла смещения ϑ0, ширину рабочей зоны пеленгации не менее двукратной ширины диаграммы направленности парциального канала по уровню половинной мощности, в процессе моделирования определяют на основе весовой функции и параметров антенной решетки конкретный вид функций F1(ϑ), F2(ϑ) и S(ϑ,ϑ0), параметрически зависящих от угла смещения ϑ0, разлагают нечетную функцию S(ϑ,ϑ0), описывающую пеленгационную характеристику, по нечетным степеням угла ϑ в ряд Маклорена
 ,
,
коэффициенты bk(ϑ0) которого являются функциями угла смещения ϑ0, определяют предварительное значение угла смещения как результат решения задачи b3(ϑ0)=0, обеспечивающее линейность пеленгационной характеристики с точностью до членов разложения пятого и более высоких порядков, вычисляют окончательное значение угла смещения ϑ0 как результат решения задачи ϑРЗ(ϑ0)→max, обеспечивающее максимальное значение ширины ϑРЗ(ϑ0)≡ϑРЗ(ϑ0,εmax) рабочей зоны, в которой ошибка измерения угла ϑ не превышает максимальной ошибки εmax, которая, в свою очередь, задана не превышающей, например, 0,01 ширины диаграммы направленности парциального канала по уровню половинной мощности, вычисляют по полученному значению угла смещения значение коэффициента b1(ϑ0), затем использованную при моделировании весовую функцию Хэмминга и определенное в результате моделирования значение угла смещения ϑ0 используют при формировании диаграмм направленности антенной решетки, приеме и обработке сигнала, получая значение SCP, после чего вычисляют значение угла ϑ прихода сигнала источника радиоизлучения - пеленг ϑC по формуле  как результат решения линейного уравнения b1(ϑ0)ϑ=SCP.
как результат решения линейного уравнения b1(ϑ0)ϑ=SCP.
2. Способ цифровой обработки сигналов при обзорной моноимпульсной амплитудной суммарно-разностной пеленгации с использованием антенной решетки, при котором в соответствии с весовой функцией, описывающей распределение поля в раскрыве антенной решетки и обеспечивающей заданный уровень боковых лепестков, формируют диаграммы направленности Fl(ϑ)=F(ϑ-ϑ0) и F2(ϑ)=F(ϑ+ϑ0) парциальных каналов приема углового датчика, где ϑ - текущий угол, отсчитываемый от равносигнального направления, причем максимумы этих диаграмм отстоят в каждую сторону от равносигнального направления на угол смещения ϑ0, а также сопряженную с ними диаграмму направленности компенсационного канала, обеспечивающую определенное превышение усиления этого канала над усилением по боковым лепесткам диаграмм направленности парциальных каналов, принимают сигналы источников радиоизлучений, осуществляют их аналого-цифровое преобразование, на выходах парциальных каналов обнаруживают сигналы с уровнями соответственно U1 и U2 и измеряют их параметры, селектируют из потоков этих сигналов те из них, уровни которых одновременно превышают уровень сигнала компенсационного канала, вычисляют сигнал рассогласования  , являющийся значением пеленгационной характеристики
, являющийся значением пеленгационной характеристики  углового дискриминатора, и по значению SCP находят значение угла ϑ прихода сигнала источника радиоизлучения - пеленг, отличающийся тем, что до приема сигналов осуществляют моделирование процесса их приема и обработки, при котором используют весовую функцию Хэмминга w(x)=0.08+0.92cos2(πx/2), -1≤x≤1, обеспечивающую уровень боковых лепестков не выше минус 40 дБ и, с учетом далее определяемого значения угла смещения ϑ0, ширину рабочей зоны пеленгации не менее двукратной ширины диаграммы направленности парциального канала по уровню половинной мощности, в процессе моделирования определяют на основе весовой функции и параметров антенной решетки конкретный вид функций F1(ϑ), F2(ϑ) и S(ϑ,ϑ0), параметрически зависящих от угла смещения ϑ0, разлагают нечетную функцию S(ϑ,ϑ0), описывающую пеленгационную характеристику, по нечетным степеням угла ϑ в ряд Маклорена
углового дискриминатора, и по значению SCP находят значение угла ϑ прихода сигнала источника радиоизлучения - пеленг, отличающийся тем, что до приема сигналов осуществляют моделирование процесса их приема и обработки, при котором используют весовую функцию Хэмминга w(x)=0.08+0.92cos2(πx/2), -1≤x≤1, обеспечивающую уровень боковых лепестков не выше минус 40 дБ и, с учетом далее определяемого значения угла смещения ϑ0, ширину рабочей зоны пеленгации не менее двукратной ширины диаграммы направленности парциального канала по уровню половинной мощности, в процессе моделирования определяют на основе весовой функции и параметров антенной решетки конкретный вид функций F1(ϑ), F2(ϑ) и S(ϑ,ϑ0), параметрически зависящих от угла смещения ϑ0, разлагают нечетную функцию S(ϑ,ϑ0), описывающую пеленгационную характеристику, по нечетным степеням угла ϑ в ряд Маклорена
 ,
,
коэффициенты bk(ϑ0) которого являются функциями угла смещения ϑ0, определяют окончательное значение угла смещения как результат решения задачи b5(ϑ0)=0, обеспечивающее соответствие пеленгационной характеристики кубической функции с отклонением только в седьмом и более высоких порядках членов разложения, далее по полученному значению угла смещения вычисляют значения коэффициентов b1(ϑ0) и b3(ϑ0), затем использованную при моделировании весовую функцию Хэмминга и определенное в результате моделирования значение угла смещения ϑ0 используют при формировании диаграмм направленности антенной решетки, приеме и обработке сигнала, получая значение SCP, после чего вычисляют значение угла ϑ прихода сигнала источника радиоизлучения, совпадающее с пеленгом ϑC, как минимальное по абсолютной величине действительное решение кубического уравнения b1(ϑ0)ϑ+b3(ϑ0)ϑ3=SCP, полученное по формулам Кардано.
3. Обзорный моноимпульсный амплитудный суммарно-разностный пеленгатор с использованием антенной решетки и цифровой обработки сигналов, содержащий последовательно соединенные блок антенных элементов, блок многоканального радиоприемного устройства, блок аналого-цифровых преобразователей, блок умножителей, диаграммообразующее устройство, выходы сигналов компенсационного канала и двух парциальных каналов которого соединены с одноименными входами блока согласованных фильтров, а выходы сигналов двух парциальных каналов соединены с одноименными входами блока обнаружения и измерения параметров сигналов, блок селекции, измеритель сигнала углового рассогласования и устройство управления, причем первый, второй, третий и четвертый управляющие выходы устройства управления подключены соответственно к входу управления блока многоканального радиоприемного устройства, входу управления синтезатора частот, первому входу управления диаграммообразующего устройства и входу управления блока обнаружения и измерения параметров сигналов, выход сигнала гетеродина синтезатора частот подключен к одноименному входу блока многоканального радиоприемного устройства, а выход сигнала дискретизации синтезатора частот - к одноименному входу блока аналого-цифровых преобразователей, причем выход параметров блока обнаружения и измерения параметров сигналов подключен к одноименным входам блока согласованных фильтров и устройства управления, отличающийся тем, что в него дополнительно введены запоминающее устройство значений весовой функции, вычислитель видов функциональных зависимостей, вычислитель коэффициентов bk(ϑ0) разложения пеленгационной характеристики, вычислитель значения угла смещения ϑ0, вычислитель окончательных значений коэффициентов b1(ϑ0) и b3(ϑ0) и вычислитель пеленга ϑC, причем выход запоминающего устройства значений весовой функции соединен со входом вычислителя видов функциональных зависимостей и, через устройство управления, со входом управления блока умножителей, а вход управления запоминающего устройства значений весовой функции - с выходом управления вычислителя видов функциональных зависимостей, входы данных и управления которого подключены к пятому и шестому выходам устройства управления, а выход вычислителя видов функциональных зависимостей соединен со входом вычислителя коэффициентов разложения пеленгационной характеристики, выход которого подключен ко входу вычислителя значения угла смещения и второму входу вычислителя окончательных значений коэффициентов разложения b1(ϑ0) и b3(ϑ0), к первому входу которого подключен выход вычислителя значения угла смещения, подключенный также через устройство управления ко второму входу управления диаграммообразующего устройства, а вход данных вычислителя значения угла смещения ϑ0 соединен с седьмым выходом устройства управления, причем выход вычислителя окончательных значений коэффициентов разложения b1(ϑ0) и b3(ϑ0) подключен к первому входу вычислителя пеленга, второй вход вычислителя пеленга соединен через устройство управления с выходом измерителя сигнала углового рассогласования, а выход вычислителя пеленга является выходом пеленгатора.
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ ОДНОКАНАЛЬНОЙ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ | 1999 |
|
RU2159940C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ И НАЛИЧИИ ОШИБОК КАЛИБРОВКИ ПРИЕМНЫХ КАНАЛОВ | 2011 |
|
RU2456631C1 |
| Способ сборки и упаковки ящиков из отштампованных картонных заготовок | 1958 |
|
SU119126A2 |
| Автомат для нарезания резьбы в соединительных пластинах для электроаппаратуры | 1959 |
|
SU133326A1 |
| Вращатель | 1975 |
|
SU619622A1 |
| US 8269665 B1, 18.09.2012 | |||
| Высокотемпературная камера-приставка к рентгеновскому дифрактометру | 1975 |
|
SU537289A1 |

