Изобретение относится к области охранной сигнализации, в частности к радиотехническим способам обнаружения нарушителей, вторгающихся в контролируемую область пространства, находящуюся на периметре охраняемого объекта. Радиотехнические способы обнаружения основаны на фиксировании возмущений электромагнитного поля, создаваемого в контролируемой зоне, при появлении в этой зоне нарушителя [Изделие РЛД-СМ. Руководство по эксплуатации БЖАК.425142.029 РЭ, раздел 1, п.1.4., с.7-13]. Средства обнаружения (СО, извещатели, датчики, детекторы вторжения), использующие этот способ обнаружения, наиболее широко распространены в системах охраны периметров важных объектов.
Существующие способы радиотехнического обнаружения нарушителя в контролируемой зоне заключаются в том, что контролируемую зону облучают импульсным радиосигналом, при приеме импульсного радиосигнала выделяют изменения его амплитуды, и при превышении этими изменениями порогового значения формируют сигнал тревоги. Такой способ обнаружения нарушителя описан в работе [Магауенов Р.Г. Системы охранной сигнализации: основы теории и принципы построения. Учебное пособие. - М. Горячая линия - Телеком, 2004. - Гл.3, п.3.2, с.134-138] и является наиболее близким к предлагаемому способу.
Для лучшего понимания изобретения следует подробнее рассмотреть существующий способ обнаружения нарушителя - прототип. Он поясняется рисунками, приведенными на фиг.1, 2.
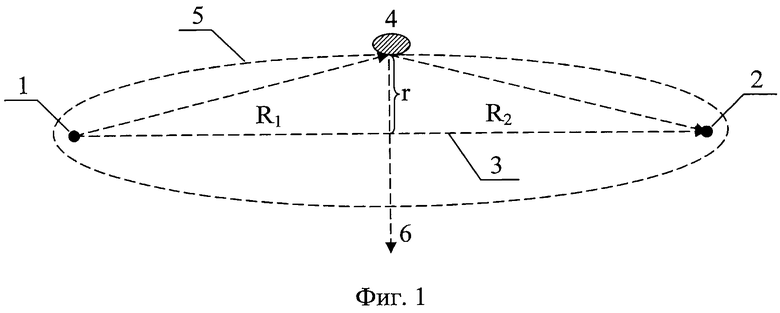
На фиг.1 показано расположение точек излучения 1 и приема 2 при обычном двухпозиционном способе обнаружения нарушителя в контролируемой зоне и формирование зоны обнаружения. При этом способе излучают импульсный сигнал из точки 1, расположенной на одном конце контролируемой зоны, и принимают сигнал в точке 2, расположенной на другом конце контролируемой зоны. В точку приема приходят два основных луча - прямой луч 3, прошедший расстояние R=R1+R2 от точки излучения до точки приема, и луч, отраженный от объекта 4 (нарушителя или помехи, например, кроны дерева), прошедший расстояние
 ,
,
где r - расстояние от отражающего объекта 4 до линии прямого луча 3, соединяющей точки излучения и приема (средней линии контролируемой зоны).
Разность хода этих лучей

При R1=R2 разность хода  . Условная линия 5, при нахождении на которой отражающего объекта разность хода одинакова, представляет собой эллипс, в фокусах которого расположены точки излучения и приема 1 и 2. Области, ограниченные эллипсами разного размера, соответствующими разностям хода ΔR, кратным половине длины волны nλ/2, называется зонами Френеля [Долуханов М.П. Распространение радиоволн. Учебник для вузов. - М. Связьиздат, 1960. - Гл.1, п.1.7, с.49-54].
. Условная линия 5, при нахождении на которой отражающего объекта разность хода одинакова, представляет собой эллипс, в фокусах которого расположены точки излучения и приема 1 и 2. Области, ограниченные эллипсами разного размера, соответствующими разностям хода ΔR, кратным половине длины волны nλ/2, называется зонами Френеля [Долуханов М.П. Распространение радиоволн. Учебник для вузов. - М. Связьиздат, 1960. - Гл.1, п.1.7, с.49-54].
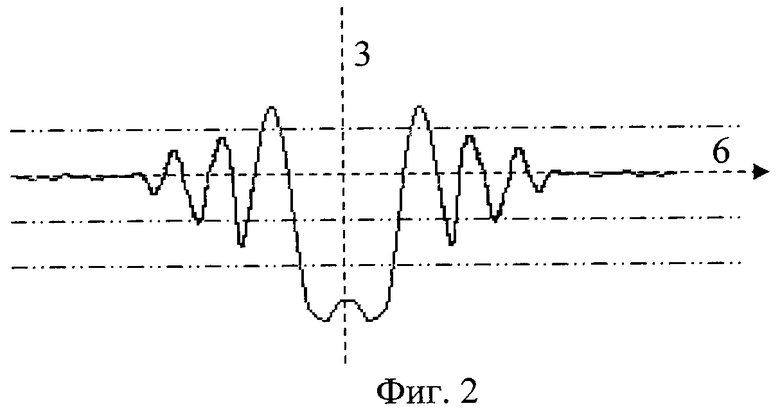
При движении объекта-нарушителя 4 через контролируемую зону по направлению стрелки 6 отраженный от объекта сигнал суммируется с прямым сигналом, вызывая изменения его амплитуды. Это суммирование происходит поочередно в фазе и в противофазе в зависимости от разности хода ΔR и номера зоны Френеля (расстояния r от отражающего объекта 4 до линии прямого луча 3). При этом амплитуда принимаемого сигнала поочередно увеличивается и уменьшается при пересечении объектом контролируемой зоны. Уровень отраженного сигнала и вызываемые им изменения принимаемого сигнала увеличиваются с приближением объекта к средней линии зоны (линии прямого луча). На фиг.2 приведена временная диаграмма, показывающая типовую форму изменения амплитуды принимаемого сигнала при движении нарушителя по направлению стрелки 6. При пересечении прямого луча 3 объект затеняет его, что приводит к сильному уменьшению амплитуды принимаемого сигнала. Изменения амплитуды принимаемого сигнала сравниваются с пороговыми значениями, и при превышении их формируется сигнал тревоги. С учетом формы сигнала часто используется двух- и трехпороговое обнаружение [Изделие РЛД-СМ. Руководство по эксплуатации БЖАК.425142.029 РЭ, раздел 1, п.1.4, с.7-13]. Пороговые уровни показаны на фиг.2 штрихпунктирными линиями. Область, ограниченная линией, при нахождении на которой нарушитель вызывает сигнал тревоги, является зоной обнаружения. Эта зона по форме близка к эллипсу 5.
Такой широко распространенный способ обнаружения может быть реализован в различных частотных диапазонах. Однако, практически он применяется в основном в диапазоне сантиметровых и миллиметровых волн, когда антенны при приемлемых габаритах могут создавать направленное излучение и ограничивать размеры области распространения электромагнитных волн, за пределами которой посторонние движущиеся объекты не могут быть причиной ложных тревог. Дело в том, что в точку приема может попадать сигнал, отраженный от массивного удаленного объекта, амплитуда которого достаточна, чтобы вызывать изменения принимаемого сигнала, сравнимые с пороговым значением. Движения этого объекта (например, транспортного средства или крон деревьев, раскачивающихся при ветре) могут вызывать ложные тревоги. Антенны с узкой диаграммой направленности ограничивают область распространения электромагнитных волн и снижают вероятность ложных тревог от движения массивных удаленных объектов.
Недостатком использования в способе обнаружения сантиметровых и миллиметровых волн является влияние растительности в пределах области распространения волн на помехоустойчивость обнаружения. Колебания растительности (травы) вызывают изменения принимаемого импульсного сигнала, соизмеримые с изменениями, вызываемыми движением нарушителя, и являются причинами ложных тревог. Поэтому контролируемая область должна быть свободна от растительности. Это приводит к необходимости регулярного обслуживания участков контролируемой зоны [Изделие РЛД-СМ. Руководство по эксплуатации БЖАК.425142.029 РЭ, раздел 3, п.3.1., п.3.2., с.33-35] путем удаления растительности и, соответственно, к значительным эксплуатационным расходам на это обслуживание.
Решением этой проблемы может быть использование диапазона метровых и дециметровых волн, в которых влияние растительности минимально. Однако, при использовании диапазона метровых и дециметровых волн, когда при приемлемых габаритах антенн не удается получить хорошие направленные свойства антенн, область распространения электромагнитных волн практически не ограничена, и границы зоны обнаружения сильно «размыты» в пространстве и нестабильны во времени. Это приводит к тому, что изменения амплитуды принимаемого импульсного радиосигнала могут вызываться движениями различных мешающих объектов (крон деревьев, транспортных средств), находящихся на значительном удалении от контролируемой области, и создавать ложные тревоги. По причине низкой помехоустойчивости такой способ обнаружения в диапазоне метровых и дециметровых волн не нашел широкого применения в системах охраны.
Целью настоящего изобретения является повышение помехоустойчивости способа обнаружения нарушителя в контролируемой зоне.
Для достижения этого технического результата в способе обнаружения нарушителя в контролируемой зоне решены несколько взаимосвязанных технических задач.
Первая задача заключается в формировании границ, ограничении и нормировании размеров зоны чувствительности, за пределами которой посторонние движущиеся объекты не могут вызывать изменений амплитуды принимаемого импульсного радиосигнала и ложных тревог. При этом отсутствуют ограничения на ширину диаграммы направленности используемых антенн и диапазон используемых частот. Эта задача является основной, и остальные без ее решения не реализуются.
Эта задача в настоящем изобретении решена следующим образом: в способе обнаружения нарушителя в контролируемой зоне, заключающемся в том, что контролируемую зону облучают импульсным радиосигналом, при приеме импульсного радиосигнала выделяют изменения его амплитуды, и при превышении этими изменениями порогового значения формируют сигнал тревоги, - длительность облучающего импульсного радиосигнала, полосу пропускания тракта приема выбирают такими, чтобы длительность принятого радиосигнала t1 не превышала времени задержки сигнала, отраженного от нарушителя, находящегося на границе контролируемой зоны, относительно прямого сигнала, принимаемого с минимальной задержкой.
Вторая техническая задача, решенная в способе обнаружения нарушителя в контролируемой зоне, заключается в формировании нескольких зон чувствительности различного размера для отслеживания движения нарушителя и повышения помехоустойчивости обнаружения. Эта задача в настоящем изобретении решена двумя различными путями.
Первый путь заключается в следующем: в первом (основном) способе обнаружения нарушителя выделяют изменения принятого сигнала в n (n≥1) каналах приема, в которых полосы пропускания тракта приема выбирают такими, чтобы длительность принятого радиосигнала tn (tn≥t1) не превышала времени задержки сигнала, отраженного от нарушителя, находящегося на границе n-й контролируемой зоны, относительно прямого сигнала, принимаемого с минимальной задержкой, а по последовательности появления изменений принятого сигнала в n-х каналах приема определяют приближение или удаление нарушителя от середины контролируемой зоны.
Второй путь заключается в следующем: в первом (основном) способе выделяют изменения принятого сигнала в n (n≥1) временных отсчетах, соответствующих времени задержки сигнала, отраженного от нарушителя, находящегося на границе n-й контролируемой зоны, относительно прямого сигнала, а по последовательности появления изменений принятого сигнала в n-х каналах приема определяют приближение или удаление нарушителя от середины контролируемой зоны.
Третья техническая задача, решенная в способе обнаружения нарушителя в контролируемой зоне, заключается в определении направления движения нарушителя путем формирования асимметричных относительно средней линии зон чувствительности и отслеживания движения нарушителя в этих зонах.
Эта задача в настоящем изобретении решена следующим образом: в предыдущих способах обнаружения нарушителя в контролируемой зоне излучение и прием импульсного радиосигнала осуществляют в направлении в сторону от середины контролируемой зоны, а по последовательности появления изменений принятого сигнала в n-х каналах приема определяют направление движения нарушителя.
Четвертая техническая задача, решенная в способе обнаружения нарушителя в контролируемой зоне, заключается в повышении устойчивости к электромагнитным помехам, вероятным для приемного тракта с широкой полосой пропускания.
Эта задача в настоящем изобретении решена следующим образом:
- в первом (основном) варианте способа обнаружения нарушителя при приеме выделяют один или несколько дополнительных радиосигналов в других полосах частот относительно полосы частот первого радиосигнала, а сигнал тревоги формируют при превышении изменениями дополнительных радиосигналов и первого радиосигнала пороговых значений;
- в других вариантах способа обнаружения нарушителя полосы пропускания в n каналах приема выбирают в различных областях частот в пределах общего спектра принимаемого сигнала.
Таким образом, реализуется двух- или многополосный прием импульсного радиосигнала и выделение коррелированных изменений амплитуды импульсов в каждом канале на фоне некоррелированных электромагнитных помех.
Решение всех четырех задач при достижении цели изобретения является взаимосвязанными, поскольку последние из них не могут быть реализованы без реализации первой, а решение первой задачи является главным.
Указанный способ и его варианты предназначены, главным образом, для двухпозиционного обнаружения нарушителя. При этом облучение контролируемой зоны импульсным сигналом и прием отраженного от нарушителя импульсного сигнала осуществляют из различных точек контролируемой зоны, обычно с противоположных концов этой зоны. Однако, они могут использоваться и при однопозиционном обнаружении нарушителя. В этом случае облучение контролируемой зоны импульсным сигналом и прием отраженного от нарушителя импульсного сигнала осуществляют из одной точки контролируемой зоны. Этот случай отражен в последнем пункте формулы изобретения.
Способ и его варианты поясняются чертежами, приведенными на фиг.3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13.
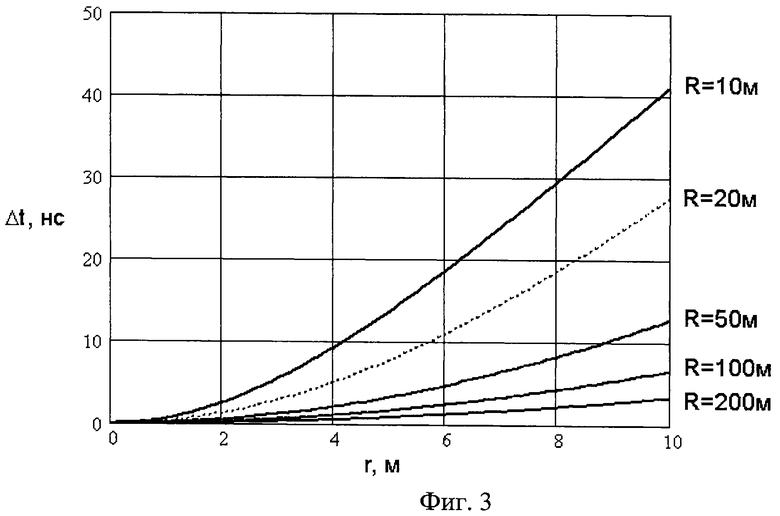
На фиг.3 показаны зависимости времени задержки Δt отраженного сигнала относительно прямого от расстояния r, характеризующего удаление объекта-нарушителя от средней линии контролируемой зоны (см. фиг.1).
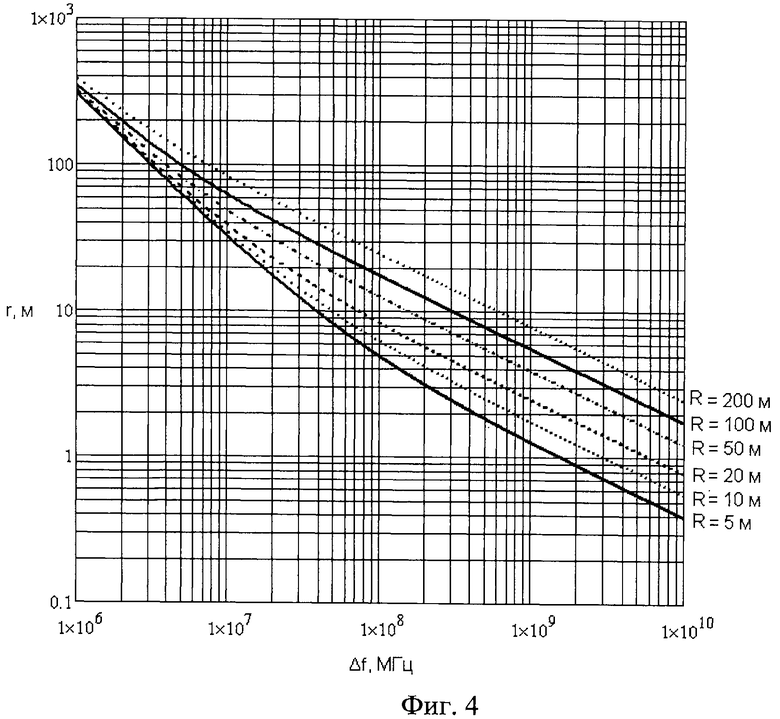
На фиг.4 показаны графики зависимостей ширины зоны чувствительности r от ширины полосы пропускания приемного тракта.
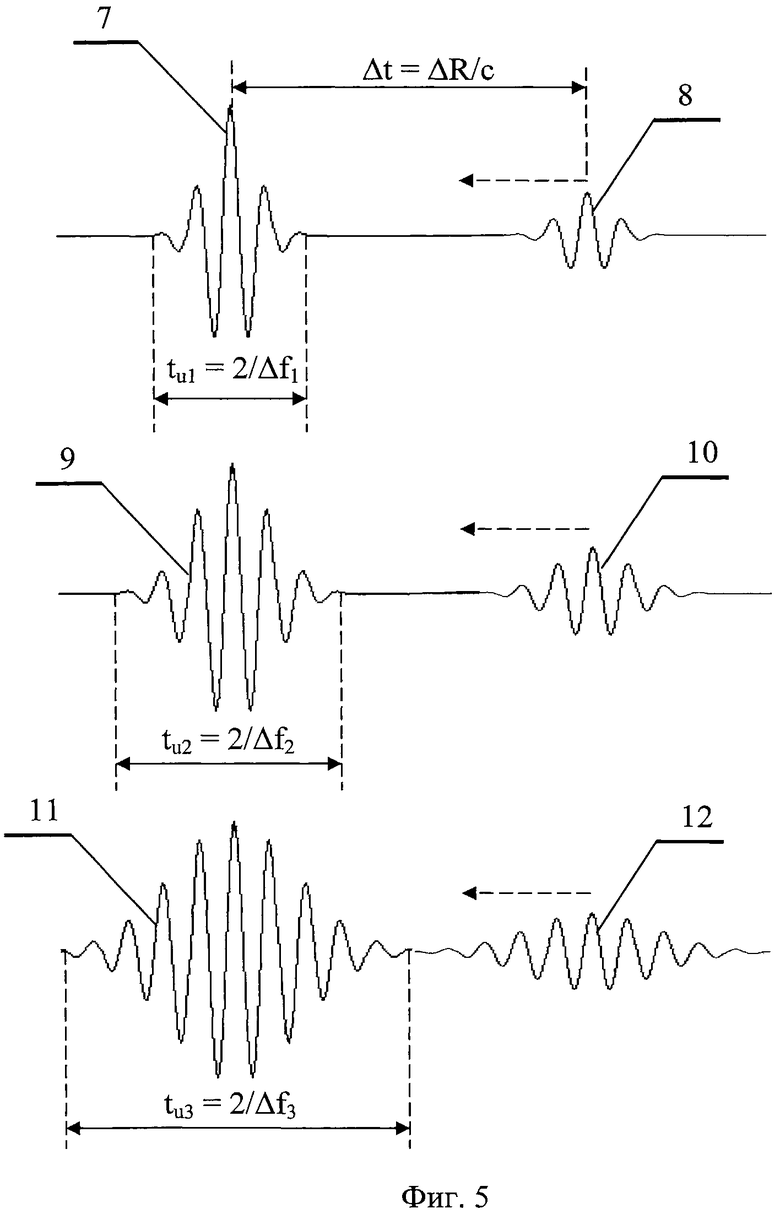
На фиг.5 показаны временные диаграммы прямых и отраженных сигналов при предлагаемом способе обнаружения при различной ширине полосы пропускания приемного тракта.
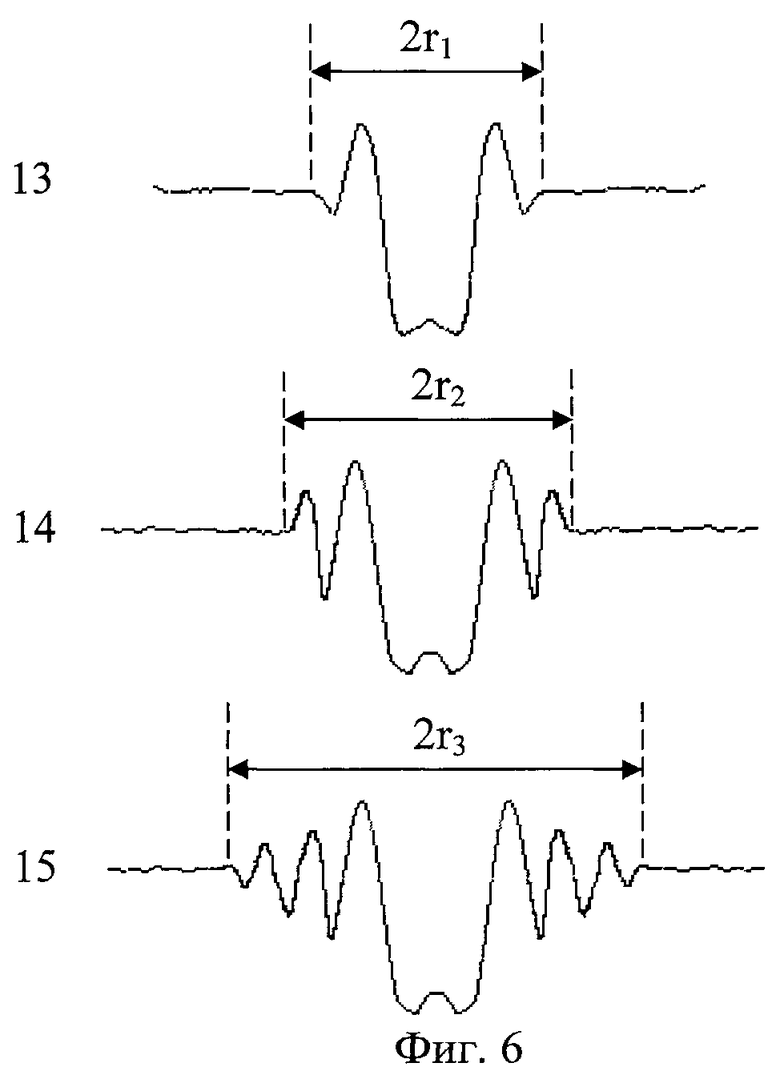
На фиг.6 показаны изменения амплитуды принимаемого сигнала, вызываемые нарушителем, при различной ширине полосы пропускания приемного тракта.
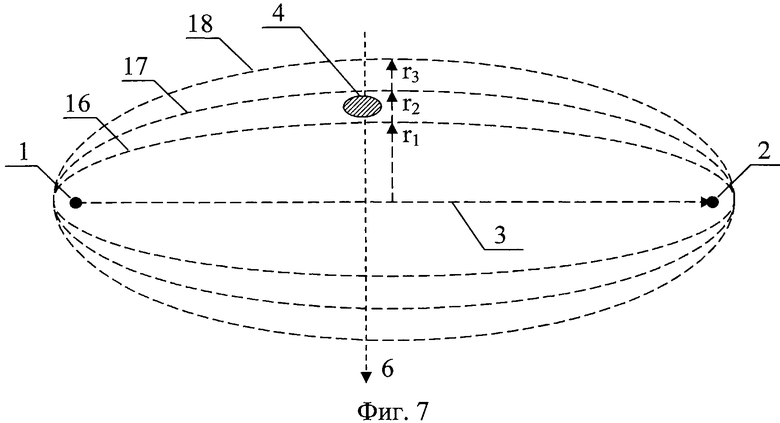
На фиг.7 показано формирование зон чувствительности различной ширины на местности.
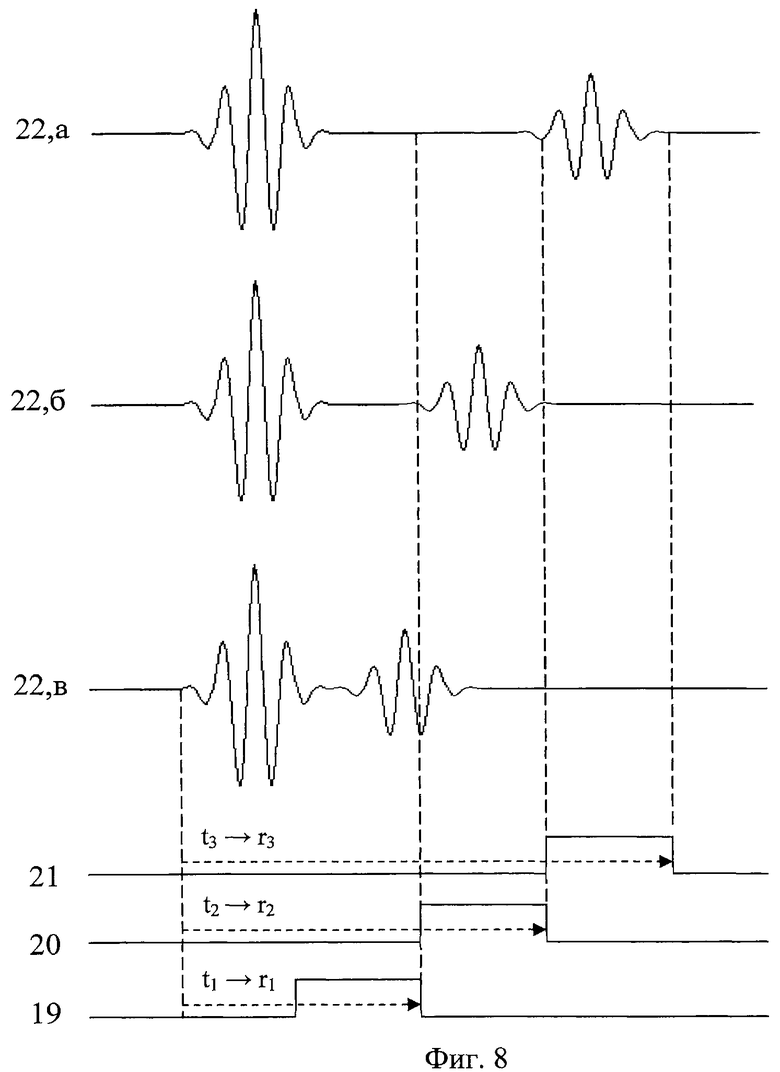
На фиг.8 приведены временные диаграммы прямых и отраженных сигналов, поясняющие вариант формирования зон чувствительности различной ширины.
На фиг.9 показано формирование несимметричных зон чувствительности на местности для определения направления движения нарушителя.
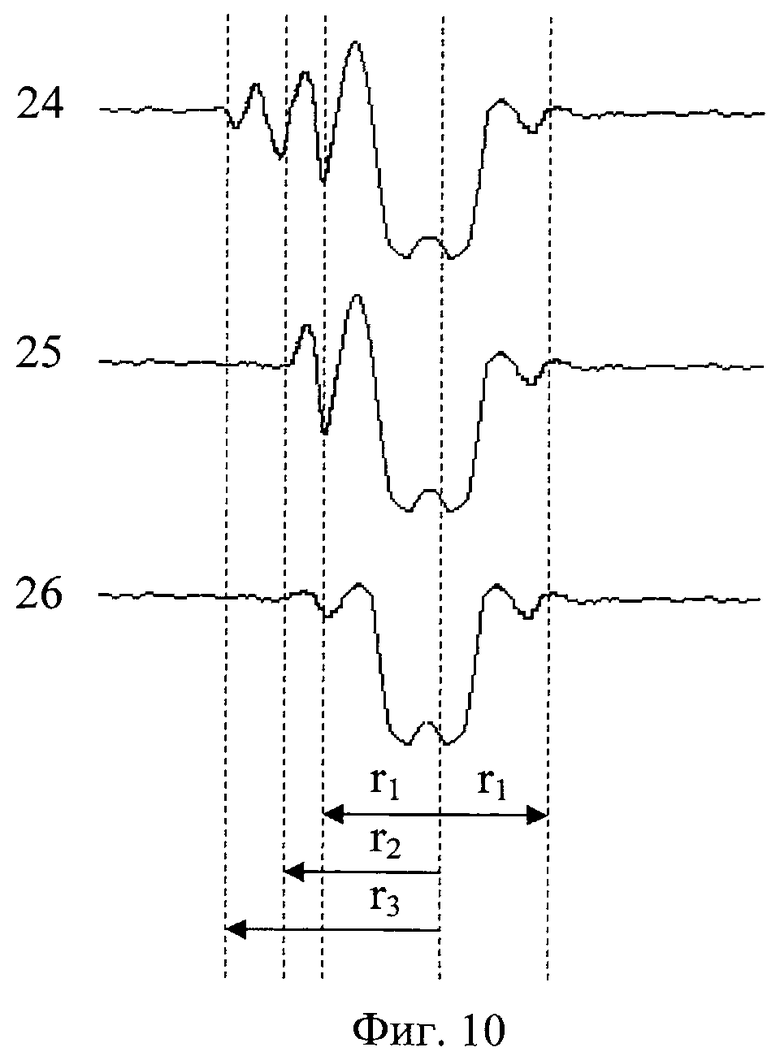
На фиг.10 показаны изменения амплитуды принимаемого сигнала, вызываемые нарушителем, при несимметричных зонах чувствительности и различной ширине полосы пропускания приемного тракта.
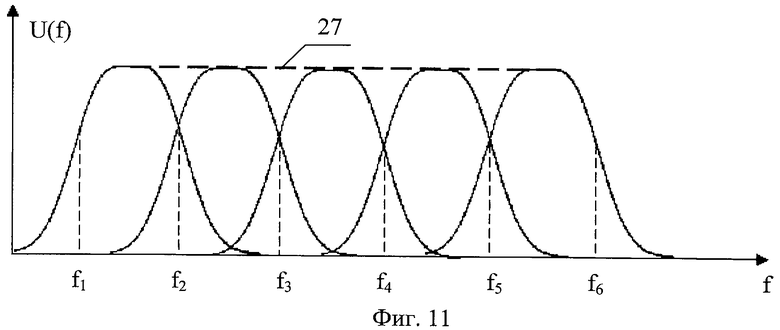
На фиг.11 показано формирование нескольких частотных каналов (полос) в пределах общего спектра облучающего сигнала для повышения электромагнитной помехоустойчивости.
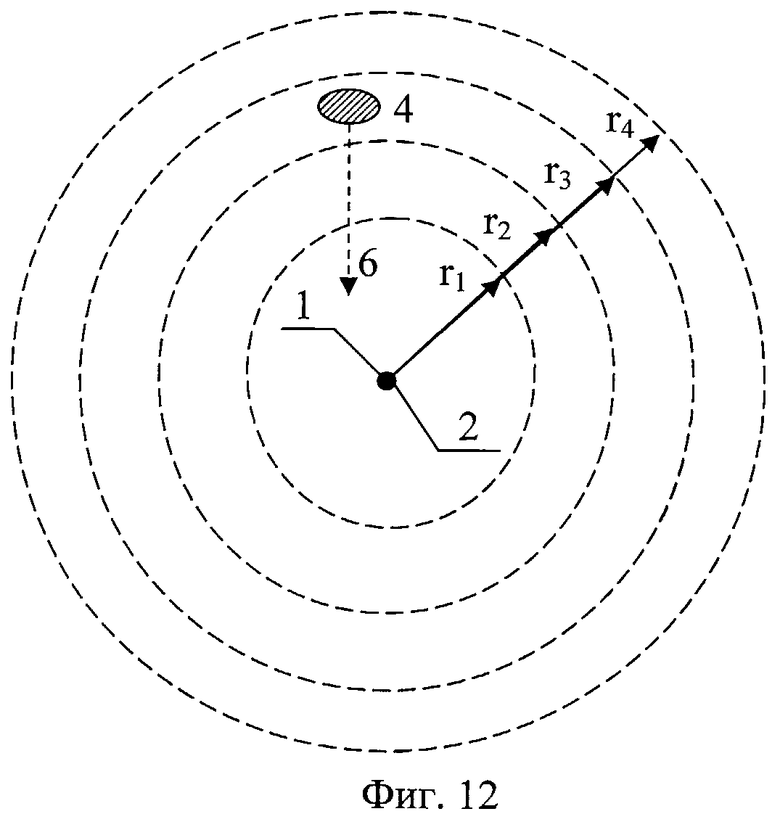
На фиг.12 показано формирование зон чувствительности различного размера на местности при однопозиционном обнаружении и ненаправленном облучении и приеме отраженного сигнала в контролируемой зоне.
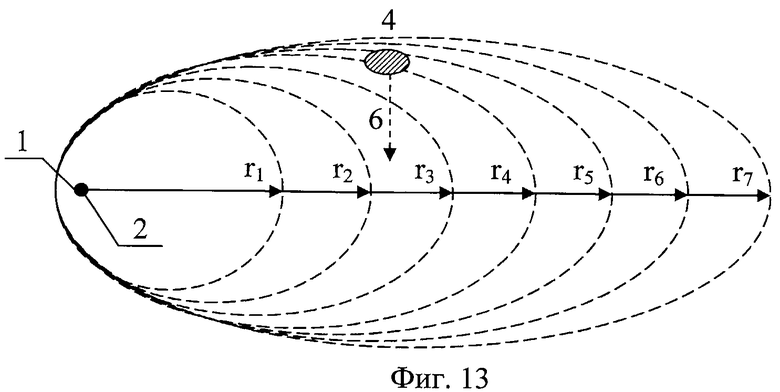
На фиг.13 показано формирование зон чувствительности различного размера на местности при однопозиционном обнаружении и направленном облучении и приеме отраженного сигнала в контролируемой зоне.
Таким образом, первая задача ограничения и нормирования размеров зоны чувствительности сводится к задаче ограничения и нормирования длительности принимаемого импульсного радиосигнала.
За счет разности хода ΔR прямой и отраженный лучи приходят в точку приема не одновременно. Задержка отраженного луча относительно прямого Δt=ΔR/c, где с - скорость распространения электромагнитной волны.
Зависимости задержки Δt от удаления отражающего объекта r при различных расстояниях между точками излучения и приема R (протяженности контролируемой зоны) приведены на фиг.3. Величина этой задержки не превышает десятков наносекунд.
В известных двухпозиционных способах обнаружения нарушителя, в т.ч. в прототипе, используют излучаемый (зондирующий) импульсный сигнал длительностью десятки микросекунд и более, что гораздо больше задержки отраженного сигнала относительно прямого. При такой длительности (tu>>Δt) любой отраженный сигнал, даже от удаленного объекта, накладывается на прямой сигнал и интерферирует с ним, вызывая изменения амплитуды принимаемого сигнала. Чтобы этого не происходило, длительность прямого сигнала не должна превышать максимальной задержки отраженного сигнала от объекта, находящегося на границе зоны чувствительности. Тогда отраженный сигнал с большей задержкой не перекрывается с прямым сигналом, не вызывает изменения его амплитуды и ложных тревог.
В предлагаемом способе обнаружения нарушителя используется излучаемый импульсный сигнал наносекундной длительности, сравнимой с временем задержки отраженного от нарушителя сигнала относительно прямого сигнала. Одновременно полоса пропускания тракта приема импульсного сигнала выбирается такой, чтобы принимаемый импульсный сигнал имел определенную длительность. Считая, что длительность импульсного сигнала tu связана с полосой пропускания приемника Δf соотношением tu=2/Δf, a длительность импульса выбирают из условия tu=Δt=ΔR/c, определим, что полоса пропускания приемного тракта должна быть Δf=2c/ΔR, или
т.е. чтобы ограничить зону чувствительности на расстоянии r от средней линии, полоса пропускания приемника должна быть не менее Δf. Отсюда
т.е. полоса пропускания приемника Δf ограничивает зону чувствительности на расстоянии r от средней линии.
Зависимости расстояния r ограничения зоны чувствительности от ширины полосы пропускания приемного тракта Δf при различных значениях расстояния R между точками излучения и приема приведены на фиг.4. Ими можно руководствоваться при выборе параметров приемного тракта для ограничения зоны чувствительности с использованием наносекундных импульсных сигналов.
Физическую суть предлагаемого способа обнаружения поясняют временные диаграммы прямых и отраженных сигналов, приведенные на фиг.5.
На них показаны принимаемые на приемной стороне импульсные сигналы при различных значениях полосы пропускания приемного тракта. В верхней части фиг.5 показан случай, когда полоса пропускания приемного тракта Δf1 достаточно велика, и длительность принимаемых импульсных сигналов tu1 мала. При этом, естественно, длительность облучающего сигнала на передающей стороне должна соответствовать требуемой длительности принимаемого сигнала, т.е. не превышать ее. На фиг.5 показаны прямой сигнал 7 и отраженный от объекта 4 сигнал 8, задержанный относительно прямого сигнала 7 на время Δt, соответствующее разности хода прямого и отраженного лучей ΔR. (Соотношение амплитуд прямого и отраженного сигналов показано условно, реальный отраженный сигнал по амплитуде гораздо меньше, чем прямой сигнал). С приближением объекта 4 к средней линии 3 разность хода ΔR и задержка Δt отраженного сигнала 8 уменьшаются, и отраженный сигнал 8 приближается к прямому сигналу 7 по направлению пунктирной стрелки на фиг.5. При некотором расстоянии от средней линии 3 отраженный сигнал 8 начинает перекрываться с прямым сигналом 7. Это расстояние является границей зоны чувствительности, при нахождении на которой объект начинает влиять на амплитуду принимаемого прямого сигнала.
В средней части фиг.5 показаны прямой сигнал 9 и отраженный сигнал 10, отличающиеся от предыдущих своей длительностью. Полоса пропускания приемного тракта в этом случае Δf2 выбрана меньшей, чем в предыдущем, и длительность импульсов tu2, соответственно, большей. В этом случае также при нахождении объекта 4 на некотором удалении от средней линии 3 отраженный сигнал 10 начинает влиять на прямой сигнал 9, но это происходит раньше, т.е. на большем расстоянии от средней линии. Таким образом, граница зоны чувствительности расположена дальше от средней линии, и зона чувствительности шире, чем в предыдущем случае.
В нижней части фиг.5 показаны прямой сигнал 11 и отраженный сигнал 12, отличающиеся еще большей длительностью tu3. В этом случае полоса пропускания приемного тракта Δf3 выбрана еще меньше, и границы зоны чувствительности получаются еще шире.
Выделяемые приемником изменения амплитуды принимаемого импульсного сигнала при различной ширине полосы пропускания приемного тракта приведены на фиг.6. Изменения амплитуды импульсов представлены в виде низкочастотных сигналов, соответствующих приращениям амплитуды импульсов при пересечении объектом 4 контролируемой зоны. Выделение этих низкочастотных сигналов осуществляется детектором амплитуды принимаемых импульсов (пиковым детектором) с последующей полосовой фильтрацией.
Низкочастотный сигнал 13 соответствует приращениям амплитуды импульсов прямого сигнала 7 при наложении на него отраженного сигнала 8, когда объект входит в зону чувствительности. Ширина этой зоны чувствительности соответствует
и определяется шириной полосы пропускания Δf1.
Аналогично, для других значений полос пропускания приемного тракта Δf2 и Δf3 низкочастотные сигналы 14 и 15 соответствуют приращениям прямых сигналов 9 и 11 при наложении на них отраженных сигналов 10 и 12, когда объект входит в зону чувствительности. Ширина зон чувствительности 2r2 и 2r3 в этих случаях определяется соответствующими полосами пропускания Δf2 и Δf3. Зависимость r от Δf приведена на фиг.4.
Сравнивая сигналы 13, 14 и 15, приведенные на фиг.6, с типовым сигналом СО при обычном радиотехническом способе обнаружения, приведенном на фиг.2, можно видеть, что они отличаются только наличием ограничения ширины зоны чувствительности. Чем шире полоса пропускания Δf, тем уже зона чувствительности 2r. Отражения за пределами зоны чувствительности не влияют на прямой сигнал и не вызывают ложных срабатываний. Изменения же прямого сигнала от воздействия объекта в пределах зоны чувствительности сравниваются с пороговым значением, и при его превышении формируется сигнал тревоги.
Таким образом, в способе обнаружения нарушителя путем выбора длительности облучающего импульсного сигнала и ширины полосы пропускания приемного тракта ограничивают длительность принимаемого импульсного сигнала и границы контролируемой зоны (зоны чувствительности), предотвращая ложные срабатывания от движения любых объектов и тел за пределами зоны чувствительности и повышая помехоустойчивость независимо от диаграмм направленности используемых антенн.
Из приведенного описания технического решения первой (основной) поставленной задачи понятны пути решения второй задачи - дополнительного повышения помехоустойчивости за счет отслеживания движения нарушителя в зоне чувствительности, т.е. использования элементов траекторного анализа.
Первый путь заключается в том, что при приеме формируют n каналов приема с различными полосами пропускания и, соответственно с различной шириной зон чувствительности, выделяют низкочастотные сигналы, соответствующие приращениям амплитуды принимаемых сигналов в этих n каналах, и при последовательном превышении ими пороговых значений формируют сигнал тревоги. Этот случай для n=3 показан на фиг.6, где по форме низкочастотных сигналов пересечения объектом контролируемой зоны видна различная ширина зон чувствительности при различной ширине полос пропускания каналов. На фиг.7 показано формирование зон чувствительности различной ширины на местности. Здесь 16 - самая узкая зона чувствительности шириной 2r1, соответствующая наиболее широкой полосе пропускания Δf1, 17 - более широкая зона чувствительности шириной 2r2, соответствующая полосе пропускания Δf2, и 18 - наиболее широкая зона чувствительности шириной 2r3, соответствующая наиболее узкой полосе пропускания Δf3. Объект 4 обнаруживается только в случае последовательного пересечения им зон чувствительности 18, 17 и 16 при подходе к средней линии 3 и затем при пересечении этих зон в обратной последовательности при выходе из контролируемой области по стрелке 6. Вход объекта 4 в соответствующую зону чувствительности определяется по превышению изменениями амплитуды принимаемых сигналов в каждом канале пороговых значений. Таким путем реализуется элемент траекторного анализа. Сочетание помеховых изменений амплитуды принимаемых импульсов в каналах в такой последовательности очень маловероятно. Таким образом решается задача дополнительного повышения помехоустойчивости.
Второй путь решения этой задачи заключается в том, что при приеме формируют n каналов приема, в каждом из которых выделяют изменения принятого сигнала в n (n≥1) временных отсчетах, соответствующих времени задержки сигнала, отраженного от нарушителя, находящегося на границе n-й контролируемой зоны, относительно прямого сигнала, а по последовательности появления изменений принятого сигнала (отраженных от нарушителя сигналов) в n-х каналах приема определяют приближение или удаление нарушителя от середины контролируемой зоны. Этот способ поясняется временными диаграммами, приведенными на фиг.8. Для каждого канала приема формируют свой стробирующий импульс 19, 20, 21, задержки которых от начала принимаемого импульса прямого сигнала t1, t2, t3 соответствуют размерам зон чувствительности r1, r2, r3. Принимаемый сигнал 22 в каждом канале имеет составляющие прямого и отраженного импульсов. При движении нарушителя к средней линии по стрелке 6 (см. фиг.7) отраженный от него импульс приближается к прямому импульсу, что показано последовательными положениями его на оси времени на диаграммах 22а, 22б, 22в (фиг.8). В процессе приближения к прямому сигналу отраженный сигнал последовательно появляется в стробах 21, 20, 19, что соответствует последовательному появлению объекта 4 в зонах чувствительности 18, 17, 16. В соответствующих каналах появляются изменения сигнала, и по превышению пороговых значений фиксируются появления объекта в соответствующих зонах чувствительности. Последовательное появление объекта 4 в зонах чувствительности 18, 17, 16 соответствует приближению его к средней линии 3. После пересечения объектом 4 средней линии и удаления от нее, отраженный сигнал начинает снова удаляться по оси времени от прямого сигнала, принимая положения, приведенные на диаграммах 22в, 22б, 22а в обратной последовательности, и появляясь в соответствующих стробах 19, 20, 21, что соответствует последовательному появлению объекта в соответствующих зонах чувствительности 16, 17, 18 и удалению его от средней линии. Фиксированием факта последовательного пересечения объектом зон чувствительности в прямом и обратном направлении реализуется элемент траекторного анализа. Таким образом, путем обработки сигналов с формированием его временных отсчетов решается задача дополнительного повышения помехоустойчивости.
Как следует из описания путей формирования нескольких зон чувствительности разного размера, эти зоны чувствительности симметричны относительно средней линии, и при движении объекта по пересечению этих зон определяется только приближение или удаление его от средней линии. При симметричных зонах чувствительности невозможно определить, с какой стороны объект приближается к средней линии или удаляется от нее. Поэтому третья поставленная задача определения направления движения объекта через зоны чувствительности заключается в формировании несимметричных относительно средней линии зон чувствительности.
Для решения этой задачи излучение и прием импульсного радиосигнала осуществляют в направлении в сторону от середины контролируемой зоны, а по последовательности появления изменений принятого сигнала (отраженных от нарушителя сигналов) в n-х каналах приема определяют направление движения нарушителя. Излучение и прием импульсного радиосигнала в направлении в сторону от середины контролируемой зоны осуществляют с помощью однонаправленных антенн. В диапазоне дециметровых волн антенны с диаграммой направленности типа «кардиоида» (например, антенна Вивальди) имеют приемлемые габариты. Формирование несимметричных зон чувствительности поясняется рисунком, приведенным на фиг.9 и диаграммами сигналов, приведенными на фиг.10. На фиг.9 приведено знакомое по фиг.1 расположение точек излучения 1 и приема 2 импульсного радиосигнала, а на местах расположения этих точек показаны диаграммы направленности 23 антенн, с помощью которых осуществляются излучение и прием сигналов. Диаграммы направленности 23 имеют форму, подобную приведенный на фиг.9, например, типа «кардиоиды», обращенной максимумом в сторону от средней линии 3. В направлении средней линии, т.е. в направлении друг на друга, антенны сохраняют достаточный уровень излучения и приема, но в сторону, обратную максимуму, уровень излучения и приема минимальны. Благодаря этому объект, находящийся со стороны максимума диаграмм направленности, переизлучает и создает в приемнике гораздо больший уровень отраженного сигнала, чем, находясь со стороны минимума диаграмм направленности. Таким образом, дополнительные зоны чувствительности 17 и 18 оказываются несимметричными относительно средней линии - они существуют только со стороны максимума диаграмм направленности. Основная зона чувствительности 16 остается, поскольку она создается «зетенением» антенн друг от друга объектом, находящимся вблизи средней линии.
На фиг.10 приведены диаграммы низкочастотных сигналов в каналах приема при движении объекта 4 в направлении стрелки 6 от зоны чувствительности 18 через зоны 17, 16 и далее. Диаграмма 24 соответствует каналу приема с зоной чувствительности 18, имеющей наибольшую ширину, диаграмма 25 соответствует каналу приема с зоной чувствительности 17, а диаграмма 26 соответствует каналу приема с зоной чувствительности 16, имеющей наименьшую ширину. Из-за несимметрии зон чувствительности сигналы в каналах также несимметричны, в них отсутствуют изменения в то время, когда объект находится со стороны минимума диаграмм направленности антенн. Поэтому по последовательности появления сигналов 24, 25, 26 в каналах можно судить о последовательности появления объекта в зонах 18, 17, 16 и о направлении движения объекта - со стороны максимума диаграмм направленности на сторону минимума или обратно. Это дает дополнительный выигрыш в помехоустойчивости, поскольку фиксирует факт пересечения средней линии контролируемой зоны.
Решение четвертой задачи - повышение устойчивости к электромагнитным помехам, актуально при использовании предлагаемого способа обнаружения нарушителя и его вариантов, поскольку они основаны на применении импульсных широкополосных сигналов наносекундной длительности и приемных трактов с широкой полосой пропускания. Решение этой задачи обеспечивается разнесением частотных полос каналов для того, чтобы электромагнитные помехи не могли действовать одновременно во всех каналах.
Для этого в первом (основном) способе обнаружения нарушителя при приеме выделяют один или несколько дополнительных радиосигналов в других полосах частот относительно полосы частот первого радиосигнала, а сигнал тревоги формируют при превышении изменениями дополнительных радиосигналов и первого радиосигнала пороговых значений.
В вариантах способа, где уже имеются дополнительные каналы приема, полосы пропускания в этих каналах выбирают в различных областях частот в пределах общего спектра принимаемого сигнала, как показано на фиг.11.
Количество разнесенных по частоте каналов определяется шириной полос каналов (f1-f2), (f2-f3), (f3-f4), (f4-f5), (f5-f6), и общей шириной спектра принимаемого сигнала 27 (f1-f6). Например, при ширине спектра принимаемого сигнала 500 МГц и максимальной полосе пропускания каждого канала не более 100 МГц может быть организовано до пяти каналов приема. Поскольку одновременное появление электромагнитной помехи в разных каналах очень маловероятно, то помехоустойчивость многоканального приема значительно выше, чем одноканального. Сигнал же при воздействии объекта-нарушителя существует во всех каналах, поэтому его обнаружение при многоканальном приеме более достоверно.
Описанные варианты способа обнаружения нарушителя рассмотрены в применении к двухпозиционному обнаружению, когда точки излучения и приема разнесены на края контролируемой зоны, облучение контролируемой зоны импульсным сигналом и прием отраженного от нарушителя импульсного сигнала осуществляют из различных точек контролируемой зоны. Однако, все эти варианты, кроме варианта с определением направления движения нарушителя, могут использоваться и для однопозиционного обнаружения, когда точки излучения и приема объединены и расположены на одной позиции. В этом случае облучение контролируемой зоны импульсным сигналом и прием отраженного от нарушителя импульсного сигнала осуществляют из одной точки контролируемой зоны.
Этот случай поясняется чертежами, приведенными на фиг.12 для ненаправленного излучения и приема и на фиг.13 для направленного излучения и приема. Направленность излучения и приема определяется типом используемых антенн - с круговой диаграммой направленности (ненаправленной) или с односторонней диаграммой направленности (например, типа «кардиоиды»).
Однопозиционное обнаружение соответствует случаю, когда точки излучения и приема 1 и 2 совмещены. Если на фиг.1 совместить точки 1 и 2, то R1=R2=0 и разность хода ΔR=2r, форма зон чувствительности из эллипсоидных превращаются в круговые, как показано на фиг.12. Все сказанное выше относительно ограничения и нормирования размеров зон чувствительности остается в силе, в контролируемой зоне могут быть сформированы зоны чувствительности различного размера rn (r1-r4 на фиг.12), и отслеживаться движение объекта-нарушителя 4 к центру зоны чувствительности по траектории 6 или от центра зоны.
Формирование, как показано на фиг.13, несимметричных зон чувствительности с различными размерами rn (например, от r1 до r7) с помощью направленного излучения и приема, позволяет отследить последовательность появления нарушителя в зонах чувствительности в случае радиальной траектории его движения, или, как показано на фиг.13, при поперечном движении нарушителя 4 по траектории 6 определить минимальный номер пересекаемой зоны чувствительности (в данном случае r3) и место пересечения контролируемой зоны.
Таким образом, предложенный способ обнаружения нарушителя в контролируемой зоне позволяет повысить помехоустойчивость обнаружения путем снижения размытости и нестабильности границ зоны чувствительности, формирования и нормирования ее размера за счет применения импульсного широкополосного облучающего сигнала и нормирования ширины полосы пропускания приемного тракта и длительности принимаемого сигнала. При этом для ограничения размеров зоны чувствительности не предъявляются требования к ширине диаграмм направленности используемых антенн. Благодаря этому способ целесообразно применять в метровом и дециметровом диапазонах длин волн, когда большие габариты антенн не позволяют использовать высокую направленность излучения и приема для ограничения зоны чувствительности.
Полученный технический результат развит в вариантах способа обнаружения. Поскольку этот результат заключается в нормировании размеров зоны чувствительности и возможности его изменения, варианты способа предусматривают формирование нескольких вложенных зон чувствительности различного размера. Это позволяет отслеживать движение нарушителя при пересечении им зон чувствительности и дополнительно повысить помехоустойчивость обнаружения. Формирование несимметричных относительно рубежа зон чувствительности за счет направленного излучения и приема в сторону от рубежа позволяет при отслеживании пересечения зон чувствительности нарушителем определять направление его движения, что также повышает помехоустойчивость обнаружения.
Варианты способа предусматривают разделение общего спектра принимаемого сигнала на отдельные полосы и использование в каждом канале при формировании зон чувствительности различных частотных полос. Это повышает электромагнитную помехоустойчивость благодаря малой вероятности действия электромагнитных помех во всех используемых полосах приема.
Варианты способа могут использоваться как при двухпозиционном обнаружении, когда излучение и прием импульсного радиосигнала осуществляют из различных точек контролируемой зоны, так и при однопозиционном обнаружении, когда излучение и прием импульсного радиосигнала осуществляют из одной и той же точки контролируемой зоны. Это расширяет область применения способа обнаружения нарушителя при блокировании контролируемых зон, в которых сложно использовать две позиции аппаратуры (углы периметра, подходы к воротам, дверям, окнам, крыши, прибрежные участки водоемов и т.п.).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ С ИСПОЛЬЗОВАНИЕМ СВЕРХШИРОКОПОЛОСНОГО СИГНАЛА (ВАРИАНТЫ) | 2015 |
|
RU2595979C1 |
| СПОСОБ СКРЫТНОГО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ В КОНТРОЛИРУЕМОЙ ЗОНЕ | 2011 |
|
RU2480837C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 2015 |
|
RU2618491C1 |
| Способ обнаружения нарушителя на контролируемом рубеже | 2019 |
|
RU2719505C1 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| ИНФРАКРАСНАЯ АКТИВНАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2014 |
|
RU2573261C2 |
| Способ обнаружения нарушителя (варианты) | 2017 |
|
RU2661753C1 |
| Инфракрасная активная система для контроля протяженных рубежей охраны | 2019 |
|
RU2722927C1 |
| ДВУХЧАСТОТНОЕ ИМПУЛЬСНО-ДОПЛЕРОВСКОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2015 |
|
RU2594383C1 |
| Мобильная система тревожной сигнализации | 2019 |
|
RU2712108C1 |
Изобретение относится к радиотехническим способам обнаружения нарушителей, пытающихся проникнуть на охраняемый объект. Техническим результатом является повышение помехоустойчивости обнаружения за счет снижения размытости и нестабильности границ зоны обнаружения и нормирования ее размера для исключения ложных срабатываний от движения предметов и тел за пределами зоны обнаружения, что актуально для диапазонов метровых и дециметровых волн при использовании слабонаправленных антенн, когда зона чувствительности не ограничена диаграммой направленности. В способе длительность облучающего импульсного радиосигнала, полосу пропускания трактов передачи и приема выбирают такими, чтобы длительность принятого радиосигнала не превышала времени задержки сигнала, отраженного от нарушителя, находящегося на границе контролируемой зоны, относительно прямого сигнала, принимаемого с минимальной задержкой. Поскольку размер зоны чувствительности нормирован и может изменяться, в способе предусматривают формирование нескольких вложенных зон чувствительности различного размера для контроля движения нарушителя с определением направления движения нарушителя. Разделение полосы частот зондирующего сигнала на несколько частотных каналов повышает электромагнитную помехоустойчивость. 6 з.п. ф-лы, 13 ил.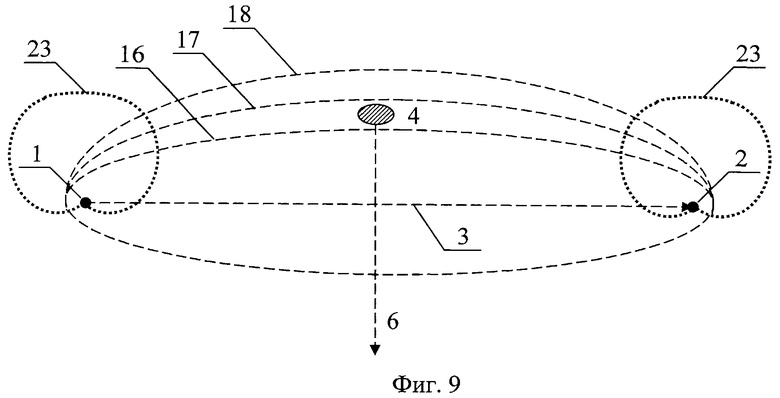
1. Способ обнаружения нарушителя в контролируемой зоне, заключающийся в том, что контролируемую зону облучают импульсным радиосигналом, при приеме импульсного радиосигнала выделяют изменения его амплитуды, и при превышении этими изменениями порогового значения формируют сигнал тревоги, отличающийся тем, что длительность облучающего импульсного радиосигнала, полосу пропускания трактов передачи и приема выбирают такими, чтобы длительность принятого радиосигнала t1 не превышала времени задержки сигнала, отраженного от нарушителя, находящегося на границе контролируемой зоны, относительно прямого сигнала, принимаемого с минимальной задержкой.
2. Способ обнаружения нарушителя по п.1, при котором выделяют изменения принятого сигнала в n (n≥1) каналах приема, в которых полосы пропускания тракта приема выбирают такими, чтобы длительность принятого радиосигнала tn (tn≥t1) не превышала времени задержки сигнала, отраженного от нарушителя, находящегося на границе n-й контролируемой зоны, относительно прямого сигнала, принимаемого с минимальной задержкой, а по последовательности появления изменений принятого сигнала в n-х каналах приема определяют приближение или удаление нарушителя от середины контролируемой зоны.
3. Способ обнаружения нарушителя по п.1, при котором выделяют изменения принятого сигнала в n (n≥1) временных отсчетах, соответствующих времени задержки сигнала, отраженного от нарушителя, находящегося на границе n-й контролируемой зоны, относительно прямого сигнала, а по последовательности появления изменений принятого сигнала (отраженных от нарушителя сигналов) в n-х каналах приема определяют приближение или удаление нарушителя от середины контролируемой зоны.
4. Способ обнаружения нарушителя по п.2 или 3, при котором излучение и прием импульсного радиосигнала осуществляют в направлении в сторону от середины контролируемой зоны, а по последовательности появления изменений принятого сигнала (отраженных от нарушителя сигналов) в n-х каналах приема определяют направление движения нарушителя.
5. Способ обнаружения нарушителя по п.1, отличающийся тем, что при приеме выделяют один или несколько дополнительных радиосигналов в других полосах частот относительно полосы частот первого радиосигнала, а сигнал тревоги формируют при превышении изменениями дополнительных радиосигналов и первого радиосигнала пороговых значений.
6. Способ обнаружения нарушителя по п.4, отличающийся тем, что полосы пропускания в n каналах приема выбирают в различных областях частот в пределах общего спектра принимаемого сигнала.
7. Способ обнаружения нарушителя по любому из пп.2, 3, 5, отличающийся тем, что облучение контролируемой зоны импульсным сигналом и прием отраженного от нарушителя импульсного сигнала осуществляют из различных точек контролируемой зоны или из одной точки контролируемой зоны.
| РАДИОЛОКАЦИОННЫЙ МОДУЛЬ И ИЗВЕЩАТЕЛИ ОХРАНЫ НА ЕГО ОСНОВЕ | 2009 |
|
RU2406154C1 |
| СПОСОБ ОБНАРУЖЕНИЯ КЛАСТЕРА МНОГОЛУЧЕВОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2000 |
|
RU2164057C1 |
| ЕР 764278 В1, 01.12.1999 | |||
| Способ изготовления бюгельных протезов | 1988 |
|
SU1505531A1 |
| Способ производства ферроизвести | 1979 |
|
SU834166A1 |

