Изобретение относится к области охранной сигнализации, в частности к способам порогового обнаружения нарушителя, применяющимся в средствах и системах обнаружения, использующих различные физические принципы действия.
Эти способы основаны на обнаружении сигнала, выделяющегося при преодолении нарушителем контролируемой области пространства, называемой зоной обнаружения, на фоне помех, вызываемых различными дестабилизирующими факторами. Основными характеристиками средств обнаружения, использующих эти способы обнаружения, являются вероятность обнаружения и средняя наработка на ложную тревогу. «Средняя наработка на ложную тревогу» или средний интервал времени между ложными тревогами - общепринятый в технике охранной сигнализации термин, эквивалентный термину «вероятность ложной тревоги», применяющемуся в радиолокации, поэтому они оба будут использоваться в соответствующих местах текста. Также будут использоваться термины «нарушитель» и «цель», как объект обнаружения. Указанные основные характеристики определяются уровнями сигнала и помехи и их соотношением, а также пороговым уровнем срабатывания.
Один из аналогов заявленного способа описан в патенте RU №2455692, МКИ G08В 13/00, G01S 13/36 «Способ обнаружения нарушителя в контролируемой зоне», заявлено 15.12.2010 г., опубликовано 10.07.2012 г. Он заключается в том, что контролируемую зону облучают импульсным радиосигналом, при приеме импульсного радиосигнала выделяют сигнал нарушителя в виде изменения амплитуды принимаемого импульсного радиосигнала при появлении нарушителя в контролируемой зоне, сравнивают сигнал нарушителя с пороговым уровнем и формируют сигнал тревоги при превышении сигналом нарушителя порогового уровня. Устройство, в котором используется указанный способ, является радиоволновым средством обнаружения, его помехи обусловлены колебаниями растительности в зоне обнаружения, проводящих предметов (проводов, кабелей, элементов заграждения), резкими изменениями погодных условий, электромагнитными воздействиями и т.п. Этот способ рассчитан на использование метрового и дециметрового диапазонов длин волн, поэтому влияние растительности, изменений погодных условий в нем минимально. Кроме того, в нем используется сверхширокополосные зондирующие сигналы, что обеспечивает ограничение поперечных размеров зоны чувствительности и влияния подвижных тел за пределами зоны чувствительности. Тем не менее, помехи остаются, и они ухудшают характеристики обнаружения и помехоустойчивости.
Оптимальное соотношение между вероятностью обнаружения нарушителя и средней наработкой на ложную тревогу можно установить, правильно выбирая пороговый уровень срабатывания. Как правило, пороговый уровень устанавливают в процессе контрольных преодолений зоны обнаружения, добиваясь срабатывания при преодолении зоны обнаружения в различных местах и различными способами. При этом неизвестно, какие характеристики получились. Подтверждение вероятности обнаружения и наработки на ложную тревогу требует большого объема испытаний и значительных затрат времен
Установка порогового уровня при настройке практически осуществляется «вслепую», по факту срабатывания при нескольких преодолениях зоны обнаружения. Это связано с недостаточной информативностью способа обнаружения нарушителя, не позволяющей контролировать при настройке и в процессе эксплуатации основные характеристики - вероятность обнаружения и наработку на ложную тревогу, и оптимизировать их соотношение, что является недостатком аналога. Указанный недостаток свойственен практически всем способам и средствам обнаружения, известным авторам.
Известны способы обнаружения нарушителя, в которых пороговый уровень устанавливается адаптивно в зависимости от уровня помех. Такой способ описан, например, в эксплуатационном документе «Средство обнаружения сейсмическое «БСК-С». Руководство по эксплуатации. БАЖК.425139.010 РЭ», НИКИРЭТ, инв. №3198, с. 73-75 (http://www.nikiret.ru\Главная\Продукция\Комплексы и средства оперативно-тактического назначения\Комплекс сигнализационный быстроразвертываемый (БСК) «Паутина-М»\БСК-С\Руководство по эксплуатации). В нем с помощью сейсмодатчиков выделяют сигнал нарушителя, сравнивают его с пороговым уровнем и при превышении сигналом нарушителя порогового уровня после соответствующей обработки по классификации объекта-нарушителя формируют сигнал тревоги. В средстве обнаружения измеряется помеховый фон (уровень помехи), и пороговый уровень устанавливается в соответствии с этим помеховым фоном. При его увеличении, соответственно увеличивается и пороговый уровень. Это позволяет повысить наработку на ложную тревогу за счет вероятности обнаружения. В средстве обнаружения предусмотрена и ручная корректировка порогового уровня по результатам контрольных пересечений зоны обнаружения, как описано в источнике «Средство обнаружения сейсмическое «БСК-С». Руководство по эксплуатации. БАЖК.425139.010 РЭ», НИКИРЭТ, инв. №3198, с. 79, 80, (http://www.nikiret.ru\Главная\Продукция\Комплексы и средства оперативно-тактического назначения\Комплекс сигнализационный быстроразвертываемый (БСК) «Паутина-М»\БСК-С\Руководство по эксплуатации).
Описанный способ обнаружения нарушителя содержит наибольшее количество общих признаков с первым вариантом заявленного способа и может быть его прототипом. Общие признаки - выделение сигнала нарушителя, сравнение его с пороговым уровнем и формирование сигнала тревоги при превышении сигналом нарушителя порогового уровня, измерение уровня помехи.
Несмотря на то, что в этом способе и устройстве предусмотрено достаточно подробное информирование оператора в процессе настройки, предусмотрено отображение информации о классе нарушителя (одиночный - групповой - транспортное средство), все же отсутствует информирование об основных текущих характеристиках - вероятности обнаружения и наработке на ложную тревогу, и возможность оптимизировать их соотношение, что ограничивает функциональные возможности способа обнаружения. Это является недостатком прототипа.
Способов обнаружения нарушителя с такими функциональными возможностями, как предоставление оператору текущей информации об основных характеристиках - вероятности обнаружения и наработке на ложную тревогу, оптимизация соотношения этих характеристик, не найдено в классе охранной сигнализации. Но в смежных областях техники, например, в радиолокации, применяются способы обнаружения сигнала на фоне помех, в которых фиксируется вероятность ложной тревоги (при переходе к нашей терминологии - наработка на ложную тревогу) и устанавливается адаптивный порог, зависимый от уровня помех. В литературе аббревиатурой названия такого подхода является CFAR (constant false alarm rate - постоянный уровень ложных тревог), в отечественной литературе - ПЧЛТ (постоянная частота ложных тревог) или ПУЛТ (постоянный уровень ложных тревог).
Такой способ описан, например, в статье Чухломина И.Е., Файзулина Н.А. Анализ обнаружителя log-CFAR с цифровым адаптивным порогом обнаружения на фоне морских помех, «Журнал радиоэлектроники», №2, 2015 г. В этом способе выделяют сигнал обнаруживаемого объекта (цели), сравнивают его с пороговым уровнем и формируют сигнал тревоги после превышения сигналом цели порогового уровня, при этом задают фиксированную вероятность ложной тревоги, измеряют среднеквадратическое отклонение помехи, и вычисляют пороговый уровень с учетом заданной вероятности ложной тревоги, измеренного среднеквадратического отклонения помехи и закона распределения помехи. При изменении среднеквадратического отклонения помехи изменяют пороговый уровень, поддерживая заданную вероятность ложной тревоги.
Этот способ может являться прототипом второго и третьего вариантов заявленного способа, т.к. для третьего варианта более близкого аналога не нашлось.
Общие признаки со вторым вариантом заявленного способа - выделение сигнала нарушителя, сравнение его с пороговым уровнем и формирование сигнала тревоги при превышении сигналом нарушителя порогового уровня, причем задают фиксированное значение средней наработки на ложную тревогу, измеряют среднеквадратическое отклонение помехи и вычисляют пороговый уровень по заданной средней наработке на ложную тревогу и измеренному среднеквадратическому отклонению помехи, при изменении среднеквадратического отклонения помехи изменяют пороговый уровень для поддержания заданной средней наработки на ложную тревогу.
Общие признаки с третьим вариантом заявленного способа - выделение сигнала нарушителя, сравнение его с пороговым уровнем и формирование сигнала тревоги при превышении сигналом нарушителя порогового уровня, причем измеряют среднеквадратическое отклонение помехи и вычисляют пороговый уровень, при изменении среднеквадратического отклонения помехи изменяют пороговый уровень.
Этот способ, как и предыдущие, имеет недостаточную информативность, поскольку поддержание постоянной наработки на ложную тревогу при повышении уровня помех снижает вероятность обнаружения, а она не контролируется, до какой степени она снизилась - неизвестно, и когда она становится неприемлемой - тоже неизвестно. При неприемлемо малой вероятности обнаружения может потребоваться откорректировать заданную наработку на ложную тревогу, оптимизируя соотношение наработки на ложную тревогу и вероятности обнаружения, а когда это сделать - тоже неизвестно. Это ограничивает функциональные возможности способа обнаружения, по крайней мере, применительно к области охранной сигнализации.
Целью и техническим результатом заявленных вариантов способа является повышение информативности путем вычисления и предоставления оператору текущих значений вероятности обнаружения и наработки на ложную тревогу, обеспечение оптимального соотношения характеристик вероятности обнаружения и наработки на ложную тревогу путем ручной или адаптивной регулировки порогового уровня, и расширение за счет этого функциональных возможностей способа.
Варианты способа имеют общую цель и используют схожие существенные признаки, поэтому они объединены в единой заявке на группу изобретений.
Для достижения цели изобретения в первом варианте способа обнаружения нарушителя, заключающемся в выделении сигнала нарушителя, сравнении его с пороговым уровнем и формировании сигнала тревоги при превышении сигналом нарушителя порогового уровня, причем измеряют среднеквадратическое отклонение помехи, согласно заявленному изобретению дополнительно измеряют амплитуду сигнала нарушителя и при установке порогового уровня вычисляют и отображают оператору значения вероятности обнаружения и средней наработки на ложную тревогу, соответствующие установленному пороговому уровню и измеренным амплитуде сигнала нарушителя и среднеквадратическому отклонению помехи, пороговый уровень устанавливают в соответствии с желаемым соотношением вероятности обнаружения и средней наработки на ложную тревогу.
Во втором варианте способа обнаружения нарушителя, заключающемся в выделении сигнала нарушителя, сравнении его с пороговым уровнем и формировании сигнала тревоги при превышении сигналом нарушителя порогового уровня, причем задают фиксированное значение средней наработки на ложную тревогу, измеряют среднеквадратическое отклонение помехи и вычисляют пороговый уровень по заданной средней наработке на ложную тревогу и измеренному среднеквадратическому отклонению помехи, при изменении среднеквадратического отклонения помехи изменяют пороговый уровень для поддержания заданной средней наработки на ложную тревогу, согласно заявленному изобретению дополнительно измеряют амплитуду сигнала нарушителя, вычисляют вероятность обнаружения по измеренным амплитуде сигнала нарушителя и среднеквадратическому отклонению помехи, и вычисленному пороговому уровню, отображают оператору значения вероятности обнаружения и средней наработки на ложную тревогу.
В третьем варианте способа обнаружения нарушителя, заключающемся в выделении сигнала нарушителя, сравнении его с пороговым уровнем и формировании сигнала тревоги при превышении сигналом нарушителя порогового уровня, причем измеряют среднеквадратическое отклонение помехи и вычисляют пороговый уровень, при изменении среднеквадратического отклонения помехи изменяют пороговый уровень, согласно заявленному изобретению дополнительно измеряют амплитуду сигнала нарушителя, задают требуемую вероятность обнаружения, пороговый уровень вычисляют по заданной вероятности обнаружения и измеренным амплитуде сигнала нарушителя и среднеквадратическому отклонению помехи, при изменении среднеквадратического отклонения помехи изменяют пороговый уровень для поддержания заданной вероятности обнаружения, вычисляют среднюю наработку на ложную тревогу по измеренному среднеквадратическому отклонению помехи и рассчитанному пороговому уровню, отображают оператору значения вероятности обнаружения и средней наработки на ложную тревогу.
При этом в каждом из вариантов измерение амплитуды сигнала нарушителя производят при выполнении контрольных преодолений зоны обнаружения, среднеквадратическое отклонение помехи выделяют ее детектированием и усреднением с постоянной времени, гораздо большей длительности сигнала нарушителя, с последующим пересчетом к среднеквадратическому отклонению, а вычисления производят в предположении нормального закона распределения помехи.
Способ обнаружения нарушителя поясняется рисунками, приведенными на фиг. 1, 2, 3, 4.
На фиг. 1 приведены зависимости средней наработки на ложную тревогу и вероятности обнаружения от порогового уровня при различных уровнях помех. Фиг. 2 поясняет измерение параметров сигнала и помехи. На фиг. 3 приведена схема алгоритма функционирования способа в трех вариантах (режимах). Фиг. 4 иллюстрирует пример использования способа в средстве обнаружения.
Выше отмечены основные помеховые факторы, воздействующие на средство обнаружения и вызывающие помехи флуктуационного характера. В соответствии с центральной предельной теоремой теории вероятностей (Левин Б.Р. Теоретические основы статистической радиотехники. М.: Радио и связь, 1989. - 656 с, с. 73, с. 132) совокупность таких помех может быть отнесена к случайным процессам с гауссовским (нормальным) законом распределения. Тогда, измеряя текущие параметры сигналов и помех, можно рассчитать основные характеристики средств обнаружения и выбрать пороговый уровень в соответствии с требуемым критерием.
При нормальном законе распределения помехи вероятность обнаружения нарушителя определится как вероятность превышения сигналом нарушителя порогового уровня (Горяинов В.Т., Журавлев А.Г., Тихонов В.И. Статистическая радиотехника: Примеры и задачи. Учеб. пособие для вузов / Под ред. В.И. Тихонова. - М.: Сов. радио, 1980. - 544 с, с. 27):

где: Uc - амплитуда сигнала,
Up - пороговый уровень,
σ - среднеквадратическое отклонение помехи,
Ф(x) - интеграл вероятности от аргумента x,
erƒ(x) - функция ошибок от аргумента x.
Здесь интеграл вероятности заменен функцией ошибок для удобства последующих расчетов.
Средняя наработка на ложную тревогу определится как средний период превышения случайным процессом (помехой) порогового уровня (Горяинов В.Т., Журавлев А.Г., Тихонов В.И. Статистическая радиотехника: Примеры и задачи. Учеб. пособие для вузов / Под ред. В.И. Тихонова. - М.: Сов. радио, 1980. - 544 с, с. 394):

где: τ - постоянная времени усреднения помехи и сигнала.
Формула (2) дает значение ТЛТ непосредственно в часах, как это принято в технике охранной сигнализации.
На фиг. 1 показаны рассчитанные по приведенным формулам зависимости средней наработки на ложную тревогу ТЛТ и вероятности обнаружения Po, от порогового уровня Uр для различных среднеквадратических значений помехи σ. В них принято τ=0,1 си Uс=1 В, т.е. аргументы нормированы относительно амплитуды сигнала. Средней наработке на ложную тревогу соответствуют прямые линии и левая шкала в логарифмическом масштабе, вероятности обнаружения соответствуют кривые линии и правая шкала в линейном масштабе. Графики приведены совместно для сравнения их зависимостей от порогового уровня. Из графиков видно, что, изменяя пороговый уровень Up, можно улучшать одну из характеристик за счет другой и устанавливать желательное соотношение между ними в зависимости от важности той или другой характеристики в каждой конкретной ситуации.
Для расчетов и отображения оператору основных характеристик средства обнаружения (TЛТ и Po) требуется измерить параметры сигнала и помехи. На фиг. 2,а приведена запись сигналограммы реального сигнала 1 с помехой 2, а на фиг. 2,б - сигналограмма с детектированными сигналом и помехой. На ней показаны измеряемые параметры сигнала и помехи: 3 - амплитуда сигнала Uc и 4 - усредненный уровень помехи  . На сигналограмме показан также пороговый уровень 5 - Uр.
. На сигналограмме показан также пороговый уровень 5 - Uр.
Измеряемое среднее значение (математическое ожидание) детектированной гауссовской помехи определяется как:

где:  - плотность вероятности помехи x при нормальном распределении.
- плотность вероятности помехи x при нормальном распределении.
В соответствии с (3) среднеквадратическое отклонение помехи σ больше, чем измеренное среднее значение  . Поэтому при расчетах следует брать:
. Поэтому при расчетах следует брать:

Схема функционирования способа в трех режимах установки порогового уровня приведена на фиг. 3. На схеме не приведены основные операции, заключающиеся в выделении сигнала нарушителя, сравнении его с пороговым уровнем и формировании сигнала тревоги при превышении сигналом нарушителя порогового уровня, а показаны только операции, относящиеся к процессу формирования порогового уровня и расчетов основных характеристик.
Во всех режимах исходной является операция 6 - измерение амплитуды сигнала. Для измерения амплитуды сигнала Uc необходимо при настройке выполнить контрольное преодоление зоны обнаружения. Измеренное значение сохраняется и используется в дальнейшем без изменения. Измеряется минимальная амплитуда сигнала. Для этого преодоление зоны обнаружения нужно выполнить в самых сложных условиях, чтобы все реальные преодоления давали сигналы с амплитудой, не менее зафиксированной.
Далее следует операция 7 выбора режима - нужно выбрать режим установки порогового уровня из трех вариантов:
- ручной 8 с контролем Po и ТЛТ,
- адаптивный 9 с фиксированной наработкой на ложную тревогу ТЛТ,
- адаптивный 10 с фиксированной вероятностью обнаружения Po.
Ручной режим и первый вариант способа обнаружения нарушителя соответствует среднему столбцу схемы на фиг. 3.
После выбора ручного режима следует операция 11 установки порогового уровня Un. Пороговый уровень устанавливается в диапазоне (0,5…0,9)⋅Uc. Затем следует операция 12 измерения уровня помехи . Измерение уровня помехи осуществляется постоянно с отслеживанием его изменения в процессе функционирования. Усреднение уровня помехи при измерении следует производить с постоянной времени, гораздо большей длительности сигнала нарушителя, чтобы этот сигнал не влиял на измеренный уровень помехи и не искажал результатов расчетов.
Далее выполняется операция 13, при которой по установленному пороговому уровню и измеренным параметрам сигнала и помехи рассчитывают характеристики ТЛТ и Po по приведенным выше формулам. На заключительном этапе 14, анализируя полученные значения характеристик, оценивают их соответствие желательным значениям. При несоответствии возвращаются к этапу 11, изменяют пороговый уровень и контролируют новые рассчитанные значения характеристик. Пороговым уровнем можно улучшить одну из характеристик за счет другой. При соответствии полученных характеристик желательным значениям процесс завершают (событие 15). Пороговый уровень оставляют таким, при котором получено оптимальное соотношение характеристик.
При реализации расчетов по приведенным формулам (1) и (2) программным путем функция ошибок erƒ(x) не всегда удобна. С достаточной точностью она может быть заменена функцией

При х≥1 относительная разница между этими функциями Δ<<1%. Расчеты с использованием функции (5) легко реализуются программным путем с помощью микроконтроллера.
Адаптивный режим с постоянным значением средней наработки на ложную тревогу ТЛТ соответствует второму варианту способа обнаружения нарушителя. Он показан правым столбцом на схеме фиг. 3. После выбора этого режима нужно в соответствии с операцией 16 установить фиксированное значение наработки на ложную тревогу ТЛТ и после измерения уровня помехи по операции 17 выполнить операцию 18 по расчету порогового уровня Up, соответствующего наработке на ложную тревогу ТЛТ. Пороговый уровень Up, рассчитывается из формулы (2), которая с учетом (5) преобразуется в следующую формулу:

Выражение (6) явно не решается относительно Uр, оно решено эвристическим методом:

Погрешность расчетов Up по формуле (7) не превышает 0,8% в приведенном на фиг. 1 диапазоне изменения параметров. Расчеты по формуле (7) могут быть реализованы программным путем с помощью микроконтроллера. После расчета по формуле (7) порогового уровня Uр, соответствующего заданному значению наработки на ложную тревогу ТЛТ, выполняется операция 19 и по формуле (1) рассчитывается вероятность обнаружения Po. При расчетах по формуле (1) для реализации их программным путем также используется замена (5).
Описанный процесс, начиная с операции 17 измерения уровня помехи , выполняется непрерывно в процессе функционирования средства обнаружения. При изменении уровня помехи рассчитывается новое значение порогового уровня Uр и новое значение вероятности обнаружения Рo. Таким образом, при изменении уровня помехи за счет соответствующего изменения порогового уровня и вероятности обнаружения поддерживается постоянное значение наработки на ложную тревогу. Полученные характеристики Рo и TЛТ отображаются оператору (событие 15).
Адаптивный режим с постоянным значением вероятности обнаружения Pо соответствует третьему варианту способа обнаружения нарушителя. Он показан левым столбцом на схеме фиг. 3. После выбора этого режима в соответствии с операцией 20 нужно установить фиксированное значение вероятности обнаружения Pо и после измерения уровня помехи Un по операции 21 в соответствии с операцией 22 выполнить расчет порогового уровня Uр, соответствующего установленной вероятности обнаружения Po. Пороговый уровень Up рассчитывается из формулы (1), которая с учетом (3) преобразуется в следующую формулу:

В таком виде (8) легко решается относительно Up:

После расчета по формуле (9) порогового уровня Up, соответствующего заданному значению вероятности обнаружения Po, выполняется операция 23 и по формуле (2) рассчитывается наработка на ложную тревогу ТЛТ.
Описанный процесс, начиная с операции 21 измерения уровня помехи , выполняется непрерывно в процессе функционирования средства обнаружения. При изменении уровня помехи рассчитывается новое значение порогового уровня Uр и новое значение наработки на ложную тревогу TЛТ. Таким образом, при изменении уровня помехи за счет соответствующего изменения порогового уровня и наработки на ложную тревогу поддерживается постоянное значение вероятности обнаружения. Полученные характеристики Po и TЛТ отображаются оператору (событие 15).
На фиг. 4 показан пример использования способа обнаружения нарушителя. Укрупненная схема устройства, в котором используется способ, показана на фиг. 4,а. Она содержит передатчик 24 и приемник 25, которые формируют зону обнаружения 26. Выходной сигнал приемника 25 представляет собой смесь сигнала нарушителя 1 и помехи 2, показанные на фиг. 2,а. Эта смесь подается на микроконтроллер 27, который ее оцифровывает (преобразует в цифровую форму) и выполняет с ней операции, предусмотренные заявленным способом. Результат обработки сигнала и помехи поступает в средство отображения информации 28. Это средство отображения обычно выполняется в двух вариантах - носимом в виде пульта настройки и стационарном для отображения информации оператору. Связь средства обнаружения со средствами отображения информации осуществляется с помощью цифрового интерфейса.
На фиг. 4,б показан экран пульта настройки, на котором отображается выводимая информация. На верхней строке отображается номер контролируемого участка рубежа. Пунктирной горизонтальной шкалой для наглядности отображаются измеряемые параметры с пороговым уровнем. Вся шкала соответствует амплитуде сигнала, принятой за единицу. Остальные параметры нормированы относительно амплитуды сигнала. Риской в начале шкалы отмечен уровень помехи Un, соответствующий среднеквадратическому отклонению помехи σ, второй риской отмечен пороговый уровень Up. Эти параметры показываются также в числовом виде на первой из нижних строк экрана. На второй из нижних строк показаны полученные значения вероятности обнаружения Рo и наработки на ложную тревогу ТЛТ. С помощью клавиатуры пульта можно изменять пороговый уровень, контролируя получающиеся при этом Po и ТЛТ. Пороговый уровень устанавливается таким, при котором полученные значения характеристик Po и ТЛТ и их соотношение окажутся приемлемыми. В других режимах (вариантах способа) с помощью клавиатуры можно задавать вероятность обнаружения или наработку на ложное срабатывание и контролировать остальные параметры. Полученное значение порогового уровня поступает на операции обнаружения сигнала нарушителя.
Варианты способа могут быть реализованы в устройстве обнаружения нарушителя и по отдельности, и совместно. При совместной реализации возможен выбор варианта способа, как изображено на фиг. 3, и возможна их параллельная реализация с тремя вариантами пороговых уровней и тремя выходами сигнала тревоги. В последнем случае есть возможность сравнить между собой варианты алгоритмов обработки сигналов с различными, в т.ч. адаптивными пороговыми уровнями, по основным характеристикам.
Введение признаков измерения параметров сигнала нарушителя и помехи и вычисление соответствующих установленному порогу вероятности обнаружения и наработки на ложную тревогу позволяет повысить информативность способа обнаружения нарушителя, отображая оператору текущие основные характеристики средства обнаружения и их изменение в процессе функционирования, упростить процесс и повысить качество настройки средства обнаружения, использовать три режима работы, включая адаптивные с фиксированной наработкой на ложную тревогу или с фиксированной вероятностью обнаружения. Это расширяет функциональные возможности систем обнаружения.
Критерии выбора того или иного режима определяются ценой ошибки первого рода (ложной тревоги) или второго рода (пропуска нарушителя). Как правило, в системах охраны наибольшую цену имеет риск пропустить нарушителя, поэтому третий режим с гарантированной вероятностью обнаружения может быть наиболее востребован. Однако в различных задачах охраны критерии эффективности могут быть различными.
Оптимальный выбор режима работы в соответствии с критериями оценки риска, оптимальная настройка средства обнаружения и контроль его текущего состояния позволяют повысить эффективность и гибкость применения средств обнаружения и безопасность охраняемых объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ С ИСПОЛЬЗОВАНИЕМ СВЕРХШИРОКОПОЛОСНОГО СИГНАЛА (ВАРИАНТЫ) | 2015 |
|
RU2595979C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ В КОНТРОЛИРУЕМОЙ ЗОНЕ | 2010 |
|
RU2455692C1 |
| Способ комбинирования технических средств обнаружения для охраны периметров и территорий объектов | 2018 |
|
RU2697622C1 |
| Комбинированная двухрубежная система охраны периметров объектов | 2018 |
|
RU2683186C1 |
| РАДИОЛУЧЕВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С ВОЗМОЖНОСТЬЮ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПЕРЕСЕЧЕНИЯ НАРУШИТЕЛЕМ РУБЕЖА ОХРАНЫ | 2015 |
|
RU2600432C1 |
| Устройство для тревожной сигнализации с сервоприводами передающего и приемного блоков | 2017 |
|
RU2665866C1 |
| СПОСОБ СКРЫТНОГО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ В КОНТРОЛИРУЕМОЙ ЗОНЕ | 2011 |
|
RU2480837C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 2015 |
|
RU2618491C1 |
| Пассивное инфракрасное устройство для обнаружения нарушителя с формированием граничных сигналов | 2017 |
|
RU2661751C1 |
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ РУБЕЖЕЙ ОБЪЕКТОВ И ГРАНИЦ | 2018 |
|
RU2705770C1 |
Изобретение относится к области охранной сигнализации, в частности к способам порогового обнаружения нарушителя, применяющимся в средствах и системах обнаружения, использующих различные физические принципы действия. Техническим результатом изобретения является повышение информативности и оптимизация соотношения между вероятностью обнаружения нарушителя и средней наработкой на ложную тревогу с помощью ручной или адаптивной установки порогового уровня. Технический результат достигается тем, что производят измерение параметров сигнала нарушителя и помехи, вычисление соответствующих установленному порогу вероятности обнаружения и наработки на ложную тревогу и отображение их оператору, установкой порога добиваются требуемого соотношения вероятности обнаружения и наработки на ложную тревогу. В вариантах способа используется фиксирование наработки на ложную тревогу или вероятности обнаружения и адаптивное изменение порога при изменении уровня помехи. Расчеты производят в предположении нормального закона распределения помехи. 3 н. и 1 з.п. ф-лы, 4 ил.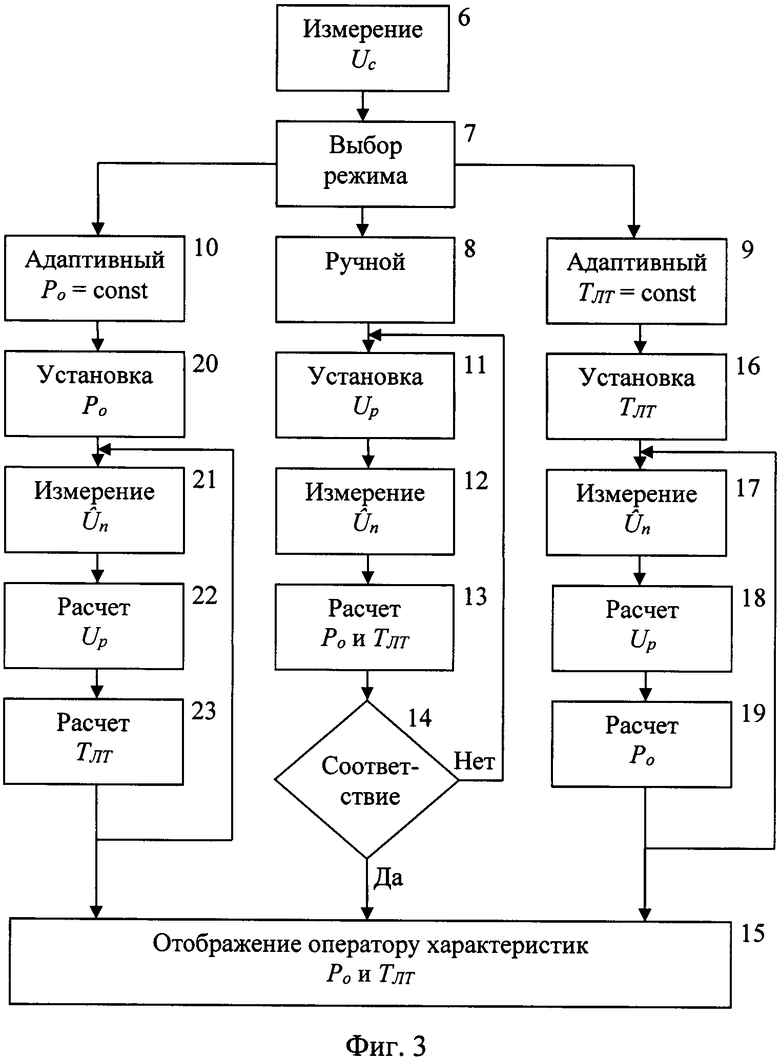
1. Способ обнаружения нарушителя, заключающийся в выделении сигнала нарушителя, сравнении его с пороговым уровнем и формировании сигнала тревоги при превышении сигналом нарушителя порогового уровня, причем измеряют среднеквадратическое отклонение помехи, отличающийся тем, что дополнительно измеряют амплитуду сигнала нарушителя и при установке порогового уровня вычисляют и отображают оператору значения вероятности обнаружения и средней наработки на ложную тревогу, соответствующие установленному пороговому уровню и измеренным амплитуде сигнала нарушителя и среднеквадратическому отклонению помехи, пороговый уровень устанавливают в соответствии с желаемым соотношением вероятности обнаружения и средней наработки на ложную тревогу.
2. Способ обнаружения нарушителя, заключающийся в выделении сигнала нарушителя, сравнении его с пороговым уровнем и формировании сигнала тревоги при превышении сигналом нарушителя порогового уровня, причем задают фиксированное значение средней наработки на ложную тревогу, измеряют среднеквадратическое отклонение помехи и вычисляют пороговый уровень по заданной средней наработке на ложную тревогу и измеренному среднеквадратическому отклонению помехи, при изменении среднеквадратического отклонения помехи изменяют пороговый уровень для поддержания заданной средней наработки на ложную тревогу, отличающийся тем, что дополнительно измеряют амплитуду сигнала нарушителя, вычисляют вероятность обнаружения по измеренным амплитуде сигнала нарушителя и среднеквадратическому отклонению помехи, и вычисленному пороговому уровню, отображают оператору значения вероятности обнаружения и средней наработки на ложную тревогу.
3. Способ обнаружения нарушителя, заключающийся в выделении сигнала нарушителя, сравнении его с пороговым уровнем и формировании сигнала тревоги при превышении сигналом нарушителя порогового уровня, причем измеряют среднеквадратическое отклонение помехи и вычисляют пороговый уровень, при изменении среднеквадратического отклонения помехи изменяют пороговый уровень, отличающийся тем, что дополнительно измеряют амплитуду сигнала нарушителя, задают требуемую вероятность обнаружения, пороговый уровень вычисляют по заданной вероятности обнаружения и измеренным амплитуде сигнала нарушителя и среднеквадратическому отклонению помехи, при изменении среднеквадратического отклонения помехи изменяют пороговый уровень для поддержания заданной вероятности обнаружения, вычисляют среднюю наработку на ложную тревогу по измеренному среднеквадратическому отклонению помехи и рассчитанному пороговому уровню, отображают оператору значения вероятности обнаружения и средней наработки на ложную тревогу.
4. Способ обнаружения нарушителя по п. 1, или 2, или 3, отличающийся тем, что измерение амплитуды сигнала нарушителя производят при выполнении контрольных преодолений зоны обнаружения, среднеквадратическое отклонение помехи выделяют ее детектированием и усреднением с постоянной времени, гораздо большей длительности сигнала нарушителя, с последующим пересчетом к среднеквадратическому отклонению, а вычисления производят в предположении нормального закона распределения помехи.
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ В КОНТРОЛИРУЕМОЙ ЗОНЕ | 2010 |
|
RU2455692C1 |
| АДАПТИВНОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2002 |
|
RU2212691C1 |
| Диализатор | 1937 |
|
SU72342A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ | 2008 |
|
RU2365945C1 |
| US 7573384 B2, 11.08.2009 | |||
| Способ производства ферроизвести | 1979 |
|
SU834166A1 |
| Способ изготовления бюгельных протезов | 1988 |
|
SU1505531A1 |

