Изобретение относится к машиностроению, в частности к грузоподъемной технике, и может использоваться во фронтальных погрузчиках.
Известен погрузчик с вилочным захватом (Александров М.П. Подъемно-транспортные машины: Учебник для машиностроительных техникумов. - 2-е изд., перераб. - М.: Машиностроение, 1984, стр.44-45, рис.38, 39), имеющим подвижную платформу с подъемным грузозахватным устройством в виде вилочного захвата, установленным на раме. Рама может наклоняться вперед или назад на угол до 10…15°.
Причинами, препятствующими достижению указанного ниже технического результата, является то, что контроль положения груза на вилочном захвате осуществляется оператором визуально из кабины на удалении от рабочего органа и при движении погрузчика по наклонной поверхности возможно опрокидывание или соскальзывание груза с вилочного захвата.
Известна система управления для погрузочно-разгрузочного устройства (патент РФ на изобретение №2309116, МПК B66F 17/00), содержащая датчик для измерения опрокидывающего момента, обеспечивающего входной сигнал к контроллеру, являющемуся в свою очередь чувствительным для оказания влияния на работу исполнительного механизма. При приближении опрокидывающего момента к пороговому значению скорость движения груза постепенно уменьшается.
Причинами, препятствующими достижению указанного ниже технического результата, является то, что при приближении опрокидывающего момента к пороговому значению снижается скорость движения груза и не предусмотрено выравнивание груза относительно горизонтали.
Задача, на решение которой направлено заявляемое изобретение, - повышение удобства контроля и управления вилочным захватом фронтального погрузчика с рабочего места оператора.
Технический результат - исключение опрокидывания и соскальзывания груза с вилочного захвата при движении погрузчика.
Указанный технический результат достигается тем, что на вилочном захвате установлен датчик положения, заполненный демпфирующей жидкостью и содержащий маятник с дроссельными отверстиями, на конце которого установлен постоянный магнит, а на корпусе датчика закреплены герметизированные магнитоуправляемые контакты (герконы), сигнал от которых поступает на информационную панель в кабину оператора, отображающую наклон к горизонтали вилочного захвата с контейнером.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существующим признакам заявленного объекта.
Следовательно, заявленное предлагаемое изобретение соответствует требованию «новизна» по действующему законодательству.
На фиг.1 изображена принципиальная схема системы контроля положения контейнера на вилочном захвате, на фиг.2 - датчик положений, на фиг.3 - место установки датчика положений на вилочном захвате, на фиг.4 - внешний вид информационной панели.
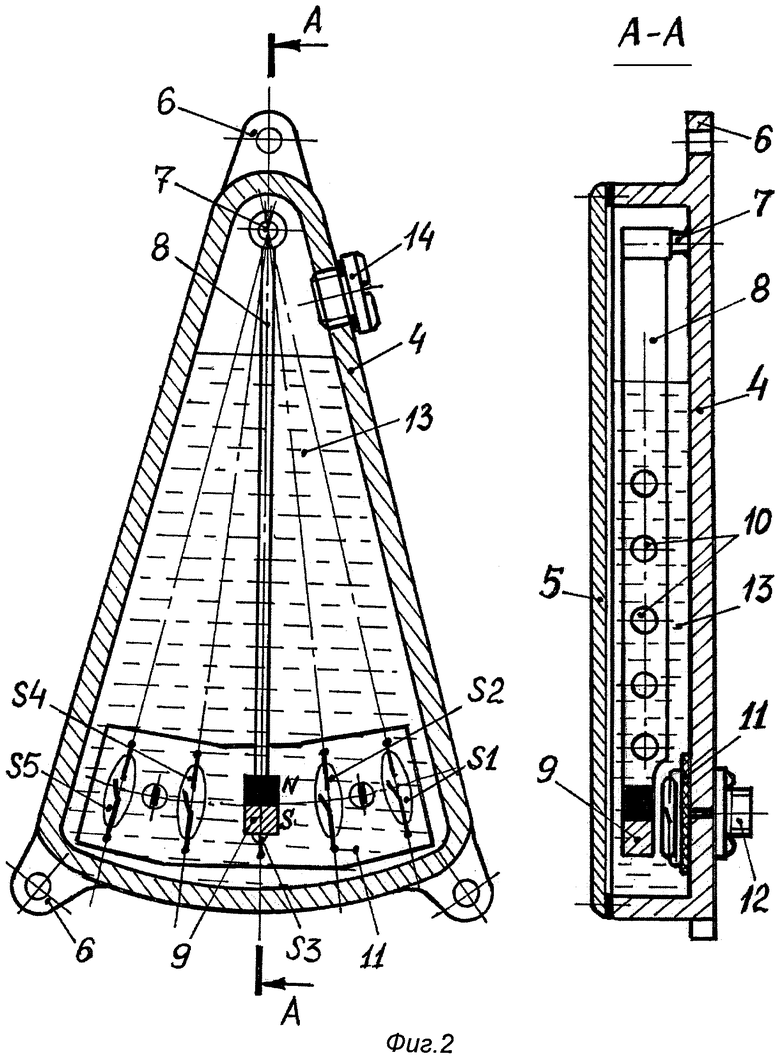
Устройство состоит (фиг.1) из датчика 1, информационной панели 2 и стабилизатора напряжения 3. В качестве источника сигнала угла наклона используются герметизированные магнитоуправляемые контакты (герконы) S1, S2, S3, S4, S5, размещенные по дуге, герконы имеют подключение через токоограничивающие резисторы R1, R2, R3, R4, R5 соответственно к анодам светодиодов VD1, VD2, VD3, VD4, VD5, катоды которых подключены на общий провод - «массу». Верхние выводы герконов S1, S2, S3, S4, S5 соединяются между собой и через стабилизатор напряжения 3 подключаются к бортовой сети погрузочного агрегата.
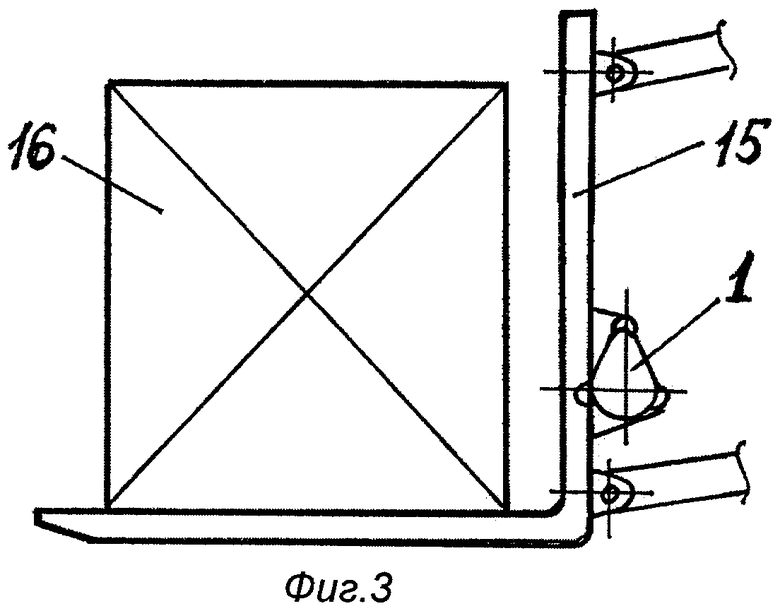
Датчик положения (фиг.2) состоит из герметичного корпуса 4, крышки 5, на корпусе датчика имеются проушины 6 для крепления датчика, внутри корпуса на оси 7 подвешен маятник 8, на конце которого установлен постоянный магнит 9, в маятнике выполнены дроссельные отверстия 10. В корпусе датчика на дуге радиуса вращения магнита 9 крепится секторная рейка 11 с герконами S1, S2, S3, S4, S5, выводы от герконов выводятся наружу из корпуса 4 датчика посредством разъема 12 и далее на информационную панель 3 посредством многожильного кабеля. В герметичном корпусе 4 находится демпфирующая жидкость 13, пробка 14 герметизирует заливное отверстие в корпусе 4.
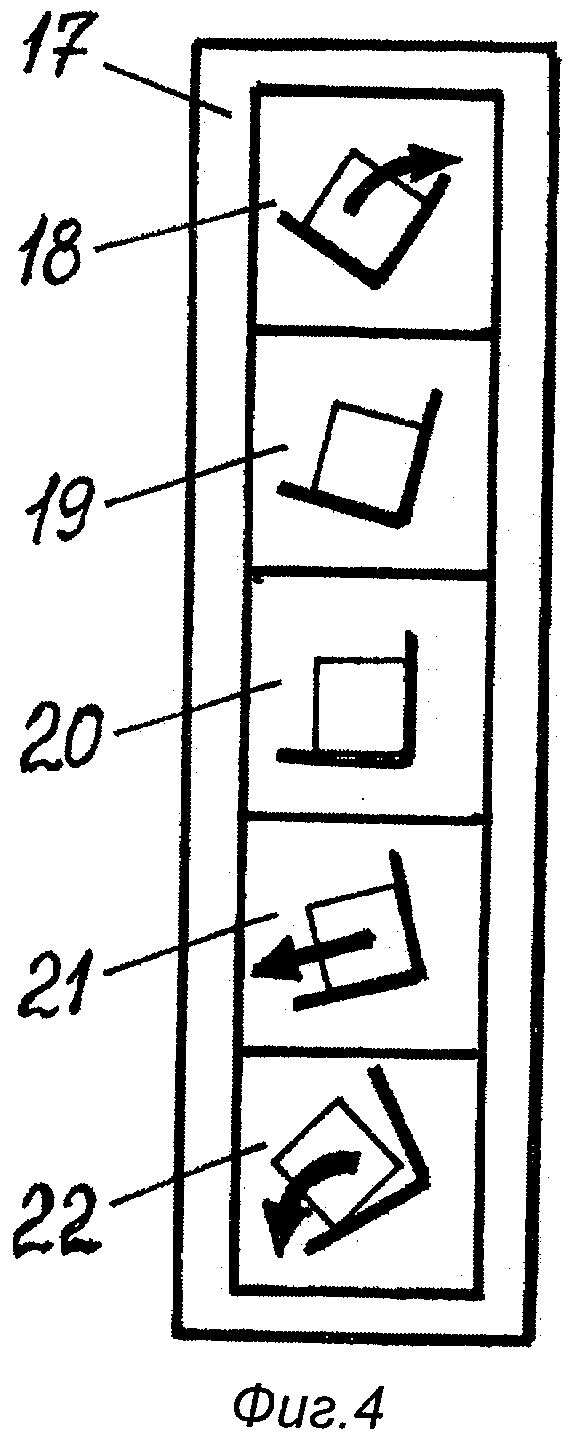
Датчик положения 1 (фиг.3) крепится к вилочному захвату 15, на котором расположен контейнер 16.
Визуализация угла наклона груза на вилочном захвате относительно горизонтали осуществляется посредством информационной панели 17 (фиг.4), размещенной в кабине оператора. Панель имеет пять светофильтров: красный 18, оранжевый 19, зеленый 20, оранжевый 21 и красный 22, имеющие изображения соответствующего угла наклона вилочного захвата.
Работа устройства осуществляется следующим образом.
Когда вилочный захват 15 (фиг.3) с контейнером 16 находятся в горизонтальном положении, датчик положений 1 находится строго в вертикальном положении. Маятник 8 датчика (фиг.2) с постоянным магнитом 9 находятся строго вертикально и симметрично относительно корпуса 4 датчика. Магнит 9 находится напротив геркона S3, который под действием магнитного поля замыкается, вследствие чего электрический ток от бортовой сети погрузочного агрегата через стабилизатор 3 (фиг.1), геркон S3, токоограничивающий резистор R3 протекает через светодиод VD3 зеленого цвета. На информационной панели (фиг.4) светится светофильтр 20, показывающий, что контейнер находится в нейтральном положении.
При наклоне вилочного захвата 15 (фиг.3) влево на определенный угол контейнер 16 также наклоняется на тот же угол, вместе с вилочным захватом 15 наклоняется и датчик положений 1. При наклоне корпуса 4 датчика (фиг.1) влево от вертикали маятник 8 с постоянным магнитом 9 стараются вернуться в вертикальное положение под действием силы тяжести, и тогда магнит 9 останавливается напротив геркона S4, который замыкаясь под действием магнитного поля пропускает ток от стабилизатора 3 (фиг.1) через токоограничивающий резистор R4 к светодиоду VD4, начинает светиться оранжевым цветом светофильтр 21 (фиг.4), информирующий оператора о том, что груз наклонен и требуется его выравнивание посредством системы управления наклоном вилочного захвата.
При большом угле наклона вилочного захвата 15 влево маятник 8 займет крайнее левое положение в корпусе 4, магнит 9 установится напротив геркона S5, ток пройдет через токоограничивающий резистор R5 и светодиод VD5. Засветится красным цветом светофильтр 22, информируя оператора о критическом наклоне вилочного захвата и принятии решений о незамедлительном выравнивании груза относительно горизонтали.
При наклоне вилочного захвата 15 вправо работа системы происходит аналогично, светятся светофильтры 18 или 19.
В случае когда магнит 9 занимает положение между герконами, например, S3 и S4, то светятся светодиоды VD3 и VD4 и соответственно светофильтры 20 и 21. Такие промежуточные положения магнит 9 может занимать при движении погрузчика с контейнером по пересеченной поверхности, тем самым вызывая колебания маятника 8. В этом случае мигание различных светофильтров может дезинформировать оператора о реальном положении груза, с целью успокоения колебаний маятника 8 в корпусе 4 датчика положений находится демпфирующая жидкость 13. Скорость перемещения маятника 8 в корпусе 4 с жидкостью 13, а соответственно и время запаздывания системы контроля положения контейнера на вилочном захвате зависят от диаметра и числа дроссельных отверстий, выполненных в маятнике 8.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного изобретения следующей совокупности условий:
- средство предназначено для повышения удобства контроля и управления вилочным захватом фронтального погрузчика с рабочего места оператора;
- средство, воплощающее заявленный объект, способно обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, заявленное изобретение соответствует требованию промышленная применимость по действующему законодательству.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля положения каретки стеллажного крана-штабелера | 1986 |
|
SU1466991A1 |
| УКАЗАТЕЛЬ НАПРЯЖЕНИЯ | 2002 |
|
RU2218576C1 |
| ПРОМЫШЛЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2006 |
|
RU2397885C2 |
| КОМПЛЕКТ ДЛЯ ДЕМОНСТРАЦИИ ЗАКОНОВ МЕХАНИКИ (ВАРИАНТЫ), МАГНИТНЫЙ ГЕРКОНОВЫЙ ДАТЧИК И ПРИСПОСОБЛЕНИЕ ДЛЯ ОПРЕДЕЛЕНИЯ МГНОВЕННОЙ СКОРОСТИ ТЕЛА, БРОШЕННОГО ГОРИЗОНТАЛЬНО | 2011 |
|
RU2460146C1 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ-ТРИПОДОМ | 2011 |
|
RU2501648C2 |
| Стенд для исследования рабочих органов погрузчиков | 1989 |
|
SU1721466A1 |
| ПОГРУЗЧИК ДЛЯ ЗАГРУЗКИ И ВЫГРУЗКИ ВАГОНОВ | 1993 |
|
RU2092429C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ИЗ МАГНИТНОГО МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2510888C1 |
| УПРАВЛЕНИЕ ПОГРУЗОЧНО-РАЗГРУЗОЧНОЙ МАШИНОЙ | 2018 |
|
RU2756412C2 |
Изобретение относится к машиностроению, в частности к грузоподъемной технике, и может использоваться во фронтальных погрузчиках. Система контроля положения контейнера на вилочном захвате содержит информационную панель, датчик положения, содержащий корпус, неподвижные магнитоуправляемые контакты, равномерно распределенные вдоль корпуса, и маятник с установленным на конце постоянным магнитом. Корпус датчика положения заполнен демпфирующей жидкостью, а в маятнике выполнены дроссельные отверстия, диаметр которых и их количество могут быть различными. Решение направлено на расширение функциональных возможностей погрузчика. 4 ил.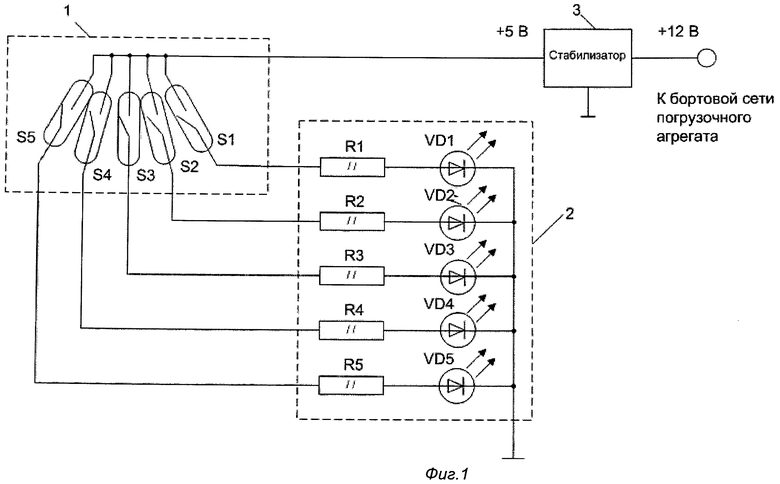
Система контроля положения контейнера на вилочном захвате, содержащая информационную панель, датчик положения, содержащий корпус, неподвижные магнитоуправляемые контакты, равномерно распределенные вдоль корпуса, и маятник с установленным на конце постоянным магнитом, отличающаяся тем, что корпус датчика положения заполнен демпфирующей жидкостью, а в маятнике выполнены дроссельные отверстия, диаметр которых и их количество могут быть различными.
| СТАТЬЯ: НАВЕСНЫЕ УСТРОЙСТВА ДЛЯ ПОГРУЗЧИКА | |||
| НОВЫЕ ЗАДАЧИ - НОВЫЕ РЕШЕНИЯ | |||
| Ж.: СКЛАД & ТЕХНИКА, №10/2006 | |||
| Датчик угла наклона | 1990 |
|
SU1752195A3 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНОГО УСТРОЙСТВА | 2003 |
|
RU2309116C2 |
| ЭПИСКОП | 1927 |
|
SU6000A1 |
| МНОГОСЛОЙНОЕ ОПТИЧЕСКОЕ ПОКРЫТИЕ | 2001 |
|
RU2226288C2 |
| DE 102008020595 A1, 29.10.2009. | |||

