Область техники
Изобретение относится к области погрузочно-разгрузочных машин, содержащих основной корпус, в целом предназначенный для размещения на земле, по меньшей мере одну погрузочно-разгрузочную стрелу, предназначенную для приема полезной нагрузки, подлежащей перемещению, и исполнительное устройство, выполненное с возможностью осуществления перемещения погрузочно-разгрузочной стрелы относительно основного корпуса, и, в частности, к передвижным погрузочно-разгрузочным машинам.
Такая машина может быть, в частности, выполнена в виде погрузчика с телескопической стрелой, вилочного погрузчика, подъемного крана, механической лопаты, ковшового погрузчика или другой машины.
Уровень техники
В области погрузочно-разгрузочных машин некоторые страны решили принять стандарты, которые предъявляют к производителям особые требования в отношении контроля устойчивости машины и управления устойчивостью машины во время работы.
Силы, действующие на устойчивость погрузочно-разгрузочной машины во время работы, включают как гравитационные силы, также известные как статические нагрузки, то есть вес погрузочно-разгрузочной стрелы, полезной нагрузки, основного корпуса и/или других элементов машины, и силы инерции, также известные как динамические нагрузки, то есть ускорения, передаваемые между погрузочно-разгрузочной стрелой, полезной нагрузкой, основным корпусом и/или другими элементами машины в результате перемещений, выполняемых во время работы, в частности, перемещений погрузочно-разгрузочной стрелы и полезной нагрузки относительно основного корпуса.
Силы инерции могут быть ограничены по своей природе путем ограничения скорости перемещения элементов машины. Так, европейский стандарт EN 1459: 1998, озаглавленный «Безопасность промышленных погрузчиков. Самоходные погрузчики с изменяемым вылетом» ("Safety of industrial trucks. Self-propelled variable reach trucks"), накладывает ограничение на максимальную скорость опускания погрузочно-разгрузочной стрелы. В частности, этот стандарт предусматривает ограничение этой скорости, так чтобы внезапная остановка погрузочно-разгрузочной стрелы, нагруженной максимальной полезной нагрузкой, не смогла вызвать опрокидывание машины, при этом позволяя задним колесам машины временно подниматься.
Однако введение постоянного ограничения скорости противоречит цели эффективной работы, которая требуется в области погрузочно-разгрузочных машин. Поэтому постоянное ограничение скорости не может являться удовлетворительным общим решением проблемы контроля устойчивости машин и управления устойчивостью машин во время работы.
Другое известное решение для уменьшения сил инерции, передаваемых на основной корпус погрузочно-разгрузочной стрелой и полезной нагрузкой, состоит в автоматическом замедлении перемещения погрузочно-разгрузочной стрелы, в частности, когда она приближается к положению завершения перемещения. Решения этого типа описаны, в частности, в GB-A-1403046, US-A-4006347, ЕР-А-0059901, US-A-5333533, JP-A-3252006 и GB-A-2390595.
В GB-A-2431248 описан поворотный корпус строительной машины, снабженный исполнительным устройством, которое соответствует правилам управления перемещением в зависимости от скорости поворотного корпуса или положения поворотного корпуса.
В ЕР-А-2733110 описана погрузочно-разгрузочная машина, в которой перемещение погрузочно-разгрузочной стрелы регулируется и изменяется автоматически в случае аварийной ситуации посредством автоматических корректирующих мер, включающих, например, опускание или втягивание телескопической стрелы.
В ЕР-А-2736833 описана погрузочно-разгрузочная машина, в которой перемещение погрузочно-разгрузочной стрелы управляется и поддерживается в каждом положении стрелы на скорости, которая меньше, чем заданная максимальная поступательная скорость.
В ЕР-А-2263965 описана погрузочно-разгрузочная машина, в которой измеряется поступательная скорость машины на земле для отключения определенных элементов управления машиной.
Однако существуют рабочие условия, при которых силы, воздействующие на погрузочно-разгрузочную машину, и, в особенности, силы инерции, трудно прогнозировать и контролировать. В частности, при движении машины по земле в случае передвижной машины, может возникать множество сил, которые не находятся под контролем системы управления погрузочно-разгрузочной стрелой. Поэтому вышеупомянутый европейский стандарт EN 1459: 1998 устанавливает, что всякий раз, когда машина передвигается по повороту, машина передвигается по уклону, машина передвигается по неровной поверхности или земле с препятствиями и отверстиями, или машина передвигается с грузом, находящемся в поднятом положении, существует риск опрокидывания машины, несмотря на использование устройства управления опрокидывающим моментом.
Также известно, что погрузчик может опрокидываться вперед, если движущееся транспортное средство выполняет торможение, когда оно перемещает груз.
Раскрытие сущности изобретения
Одна задача изобретения состоит в создании способов и систем для управления погрузочно-разгрузочной машиной, которые обеспечивают возможность сохранения устойчивости машины, в частности, с учетом сил инерции, и которые не ограничивают удобство использования машины в случае, если учет сил инерции выполнен неточно или неэффективно из-за рабочих условий.
С этой целью изобретение предусматривает погрузочно-разгрузочную машину, содержащую:
основной корпус,
погрузочно-разгрузочную стрелу, предназначенную для приема груза, подлежащего перемещению,
исполнительное устройство, выполненное с возможностью осуществления перемещения погрузочно-разгрузочной стрелы относительно основного корпуса,
датчик регистрации опрокидывающего момента, чувствительный к величине, показывающей опрокидывающий момент, приложенный к основному корпусу, относительно оси опрокидывания,
блок управления, выполненный с возможностью управления исполнительным устройством, так чтобы останавливать или предотвращать выполняемое или запрашиваемое перемещение погрузочно-разгрузочной стрелы, как только выполнено условие остановки, причем условие остановки зависит от измеренной величины, показывающей опрокидывающий момент, и
элемент выбора, который может приводиться в действие оператором для выбора простого режима работы и расширенного режима работы.
Согласно одному варианту осуществления, если выбран расширенный режим работы, условие остановки, используемое блоком управления, также зависит от величины, представляющей скорость выполняемого или запрашиваемого перемещения погрузочно-разгрузочной стрелы,
и, если выбран простой режим работы, условие остановки не зависит от величины, представляющей скорость перемещения погрузочно-разгрузочной стрелы.
Изобретение также обеспечивает способ управления для управления исполнительным устройством в погрузочно-разгрузочной машине, содержащей подвижный основной корпус и погрузочно-разгрузочную стрелу, предназначенную для приема груза, подлежащего перемещению, причем исполнительное устройство выполнено с возможностью осуществления перемещения погрузочно-разгрузочной стрелы относительно основного корпуса,
при этом способ включает:
измерение величины, показывающей опрокидывающий момент, приложенный к основному корпусу, относительно оси опрокидывания, и
остановку или предотвращение выполняемого или запрашиваемого перемещения погрузочно-разгрузочной стрелы, как только выполнено условие остановки, причем условие остановки зависит от измеренной величины, показывающей опрокидывающий момент,
причем, если выбран расширенный режим работы, условие остановки также зависит от величины, представляющей скорость перемещения погрузочно-разгрузочной стрелы,
а, если выбран простой режим работы, условие остановки не зависит от величины, представляющей скорость перемещения погрузочно-разгрузочной стрелы.
В расширенном рабочем режиме блок управления применяет условие остановки, которое зависит от скорости перемещения погрузочно-разгрузочной стрелы, или от величины, представляющей эту скорость. Это обеспечивает возможность учета сил инерции, которые могут возникать при этой скорости в случае остановки перемещения. Для учета этого могут быть использованы различные методы, основанные на скорости. Данный режим работы особенно подходит для условий работы, при которых корпус машины неподвижен, поскольку в этом случае силы инерции могут быть определены с достаточной степенью точности. Другими словами, в этом случае можно установить реальные ограничения скорости для запрета или предотвращения перемещений погрузочно-разгрузочной стрелы, которые фактически создают риск опрокидывания в случае остановки.
Если выбран простой режим работы, условие остановки не зависит от величины, представляющей скорость перемещения погрузочно-разгрузочной стрелы. Таким образом, погрузочно-разгрузочной стрелой проще управлять. Согласно одному варианту осуществления, если выбран простой режим работы, способ также включает этап, на котором перемещение погрузочно-разгрузочной стрелы предотвращается или останавливается, как только величина, показывающая опрокидывающий момент, превысит заданное пороговое значение.
Согласно вариантам осуществления погрузочно-разгрузочная машина или способ управления может включать одну или более из следующих характеристик.
Согласно одному варианту осуществления элемент выбора выполнен с возможностью:
выбора расширенного режима работы в ответ на первое воздействие оператора на элемент выбора, и
выбора простого режима работы в ответ на второе воздействие оператора на элемент выбора.
Согласно одному варианту осуществления блок управления выполнен с возможностью выбора расширенного режима работы в ответ на обнаружение того факта, что основной корпус оставался по существу в неподвижном состоянии в течение времени, превышающего заданное пороговое значение.
Можно выполнить одну или более проверок для обнаружения того, что основной корпус находится по существу в неподвижном состоянии, например, для обнаружения приведения в действие парковочного тормоза, отключения трансмиссии (вывода из зацепления электромагнитным клапаном или электрическим реле управления), опускания стабилизирующих опор 5, так чтобы они опирались на землю, или условия, основанного на поступательной скорости основного корпуса.
Согласно одному варианту осуществления машина также содержит датчик поступательной скорости, выполненный с возможностью измерения величины, представляющей поступательную скорость основного корпуса, и
блок управления выполнен с возможностью обнаружения того, что основной корпус остается по существу в неподвижном состоянии, в зависимости от величины, представляющей поступательную скорость основного корпуса.
Согласно одному варианту осуществления, если выбран расширенный режим работы, блок управления выполнен с возможностью определения порогового значения, представляющего максимальную допустимую скорость, в зависимости от величины, показывающей опрокидывающий момент,
сравнение величины, представляющей скорость выполняемого или подлежащего выполнению перемещения, с пороговым значением, представляющим максимальную допустимую скорость и
управление исполнительным устройством в зависимости от результата указанного сравнения, с тем чтобы:
выполнять или продолжать перемещение погрузочно-разгрузочной стрелы, пока величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, ниже указанного порогового значения, и
предотвращать или останавливать перемещение погрузочно-разгрузочной стрелы, как только величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, становится выше указанного порогового значения.
Благодаря этим признакам в расширенном режиме работы перемещение погрузочно-разгрузочной стрелы, выполняемое машиной, всегда выполняется в соответствии с запросом на перемещение, произведенным оператором, но это перемещение не выполняется или прерывается, если в результате запроса оператора будет или может быть превышено пороговое значение, представляющее максимально допустимую скорость. Другими словами, блок управления действует как фильтр включения/выключения, который выполняет или обеспечивает возможность выполнения запросов на перемещение, которые соответствуют критерию допустимости, но предотвращает или отменяет выполнение запросов на перемещение, которые не соответствуют критерию допустимости. При этом блоку управления не нужно изменять запросы на перемещение, выдаваемые оператором, что означает, что оператор сохраняет эффективное управление этими запросами, в частности, в отношении скорости.
Пороговое значение, представляющее максимальную скорость, может быть определено различными способами, в частности, с целью исключения перемещений, связанных с чрезмерным количеством движения, то есть количеством движения, которое машина не способна воспринять или распределить без риска создания неустойчивости.
Согласно одному варианту осуществления машина также содержит датчик регистрации опрокидывающего момента для измерения величины, показывающей опрокидывающий момент, приложенный к основному корпусу, относительно оси опрокидывания.
Использование такого датчика регистрации опрокидывающего момента обеспечивает возможность блоку управления учитывать информацию, относящуюся к опрокидывающему моменту в данный момент времени. Такой датчик регистрации опрокидывающего момента может быть выполнен различными способами для измерения различных величин. Согласно одному варианту осуществления датчик регистрации опрокидывающего момента содержит тензометр, например, тензометр, чувствительный к деформациям оси шасси машины (изменению длины между двумя контактами, разнесенными по оси) и/или погрузочно-разгрузочной стрелы. Согласно одному варианту осуществления датчик регистрации опрокидывающего момента содержит датчик давления в исполнительном устройстве стрелы, например, датчик давления, расположенный на цилиндре исполнительного устройства. Согласно другому примеру, датчик регистрации опрокидывающего момента может быть датчиком нагрузки, как отмечено в ЕР-А-1532065. Датчик регистрации опрокидывающего момента может быть также выполнен в виде измерительной системы, содержащей несколько датчиков для измерения нескольких физических величин, и блока обработки для объединения этих измерений в виде величины, показывающей опрокидывающий момент.
Согласно одному варианту осуществления машина также содержит модуль определения порогового значения, выполненный с возможностью определения порогового значения, представляющего максимальную допустимую скорость в зависимости от измерительного сигнала, выдаваемого датчиком регистрации опрокидывающего момента. Согласно одному варианту осуществления пороговое значение, представляющее максимальную допустимую скорость, уменьшается, если опрокидывающий момент увеличивается.
Согласно одному варианту осуществления машина также содержит управляющий элемент, который может приводиться в действие оператором для выдачи сигнала запроса на перемещение, предназначенного для воздействия на исполнительное устройство, чтобы перемещение погрузочно-разгрузочной стрелы было выполнено или остановлено исполнительным устройством по сигналу запроса на перемещение.
Согласно одному варианту осуществления датчик регистрации опрокидывающего момента расположен на концевой части основного корпуса, обращенной против направления перемещения, которое выполняется или должно быть выполнено по сигналу запроса на перемещение, и величина, измеренная датчиком регистрации опрокидывающего момента, работает в направлении, противоположном опрокидывающему моменту. Такой вариант осуществления, например, показан на примере тензометра, измеряющего деформации задней оси погрузочно-разгрузочного транспортного средства, в котором погрузочно-разгрузочная стрела проходит в направлении передней части транспортного средства.
Согласно одному варианту осуществления датчик регистрации опрокидывающего момента расположен на концевой части основного корпуса, обращенной в направлении выполняемого или подлежащего выполнению перемещения по сигналу запроса на перемещение, и величина, измеренная датчиком регистрации опрокидывающего момента, работает в том же направлении, что и опрокидывающий момент. Такой вариант осуществления, например, показан на примере тензометра, измеряющего деформации передней оси погрузочно-разгрузочного транспортного средства, в котором погрузочно-разгрузочная стрела также проходит в направлении передней части транспортного средства.
Перемещение погрузочно-разгрузочной стрелы, выполняемое при помощи исполнительного устройства, может быть различного типа, например, поступательным движением или поворотом. Согласно предпочтительному варианту осуществления исполнительное устройство выполнено с возможностью осуществления поворота погрузочно-разгрузочной стрелы вокруг по существу горизонтальной оси относительно основного корпуса.
Погрузочно-разгрузочная стрела может иметь одну или более степеней свободы относительно основного корпуса. Когда существует несколько степеней свободы движения с несколькими исполнительными устройствами, связанными с этими соответствующими степенями свободы движения, не обязательно все различные исполнительные устройства управляются одинаковым образом. В частности, способы управления, описанные в данном документе, предпочтительно применяются к степени (степеням) свободы движения, которые оказывают наибольшее влияние на устойчивость машины.
Величина, представляющая скорость, применяемая для управления машиной, может быть определена различными способами.
Согласно одному варианту осуществления сигнал запроса на перемещение имеет параметр, представляющий скорость перемещения, подлежащего выполнению, и управляющий элемент может приводиться в действие оператором для настройки параметра сигнала запроса на перемещение на одно из множества значений параметра, соответственно представляющих множество значений скорости и состояние остановки.
Согласно одному варианту осуществления блок управления выполнен с возможностью приема сигнала запроса на перемещение, выдаваемого управляющим элементом. В данном случае, блок управления может учитывать параметр сигнала запроса на перемещение, например, его амплитуду, частоту, длительность или любой другой заданный параметр, в качестве величины, представляющей скорость перемещения, подлежащего выполнению. Согласно одному варианту осуществления сравнение, выполненное блоком управления, представляет собой сравнение параметра сигнала запроса на перемещение и указанного порогового значения.
Приводимый в действие оператором управляющий элемент может быть выполнен различными способами, например, в виде рычага регулировки наклона, ручки управления, сенсорного экрана или другого элемента. Согласно одному варианту осуществления приводимый в действие оператором управляющий элемент соединен с блоком управления для подачи сигнала запроса на перемещение блоку управления в виде электрического сигнала. Например, параметр сигнала запроса на перемещение, который представляет запрошенную скорость, представляет собой уровень напряжения, интенсивности, частоту или длительность сигнала запроса.
Согласно одному варианту осуществления способ управления, реализуемый блоком управления, включает этап приема сигнала запроса на перемещение.
Согласно другим вариантам осуществления управляющий элемент, формирующий сигнал запроса на перемещение, не обязательно соединен с блоком управления, или блок управления не обязательно выполнен с возможностью приема этого сигнала запроса на перемещение, например, если это чисто механический сигнал.
Согласно одному варианту осуществления, который может быть использован в этом случае, погрузочно-разгрузочная машина также содержит средство измерения для измерения мгновенной скорости погрузочно-разгрузочной стрелы относительно основного корпуса. В этом случае сравнение, выполненное блоком управления, может быть сравнением указанной мгновенной скорости и указанного порогового значения.
Для измерения мгновенной скорости погрузочно-разгрузочной стрелы относительно основного корпуса могут использоваться различные методы. В соответствии с методом более непосредственного измерения, может использоваться датчик угловой или линейной скорости. В соответствии с методом менее непосредственного измерения, можно измерять величину, коррелирующую с мгновенной скоростью погрузочно-разгрузочной стрелы, например, скорость подвижной части, соединенной с погрузочно-разгрузочной стрелой или другим элементом. Согласно одному варианту осуществления, в котором исполнительное устройство содержит гидравлический привод, машина также содержит средство измерения для измерения гидравлического потока, который должен подаваться в гидравлический привод, в качестве информации о скорости. В этом случае сравнение, выполненное блоком управления, может быть сравнением гидравлического потока и указанного порогового значения.
Исполнительное устройство(а) погрузочно-разгрузочной стрелы может быть выполнено различными способами, например, в виде одного или более электрических или гидравлических приводов.
Согласно одному варианту осуществления исполнительное устройство содержит гидравлический привод и устройство с переменным расходом для регулировки гидравлического потока, который должен подаваться в гидравлический привод. Такое гидравлическое устройство с переменным расходом может быть выполнено различными способами.
Согласно одному варианту осуществления устройство с переменным расходом содержит насос с регулируемым расходом. Например, в насосе с наклонным ротором элемент регулирования потока может влиять на угол наклона наклонного ротора. Согласно одному варианту осуществления устройство с переменным расходом содержит редукционный золотниковый клапан. Например, в редукционном золотниковом клапане элемент регулирования потока может влиять на положение ползуна.
Согласно одному варианту осуществления приводимый в действие оператором управляющий элемент функционально соединен, например, механически или гидравлически, с устройством с переменным расходом, для перемещения элемента регулирования потока устройства с переменным расходом в зависимости от воздействия оператора на управляющий элемент.
В таком случае блок управления не обязательно способен предотвращать прямое приведение в действие устройства с переменным потоком путем воздействия оператора на элемент управления, и создание результирующего гидравлического потока.
Согласно одному варианту осуществления, который может быть использован в этом случае, исполнительное устройство также содержит электромагнитный клапан, расположенный между устройством с переменным расходом и гидравлическим приводом, причем электромагнитный клапан выполнен с возможностью управления блоком управления для предотвращения или остановки перемещение погрузочно-разгрузочной стрелы, как только величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, становится выше указанного порогового значения.
В таком варианте осуществления сигналом запроса на перемещение может быть перемещение элемента регулирования потока устройства с переменным расходом. Такое перемещение может быть измерено при помощи тензодатчика и выдано в виде электрического сигнала блоку управления. Однако не всегда возможно или желательно предусмотреть такой тензодатчик в устройстве с переменным расходом, в частности, по причинам, связанным с габаритами или стоимостью устройства с переменным расходом. При отсутствии такого тензодатчика сигнал запроса на перемещение не может быть легко выдан блоку управления. В этих случаях блок управления может работать, основываясь на измерении фактического перемещения погрузочно-разгрузочной стрелы, а не на основе сигнала запроса на перемещение.
В предпочтительном варианте осуществления электромагнитный клапан представляет собой клапан постепенного запуска. Использование клапана постепенного запуска обеспечивает возможность выполнения надежного измерения мгновенной скорости погрузочно-разгрузочной стрелы до того момента, как погрузочно-разгрузочная стрела наберет большое количество движения, так чтобы перемещение можно было прервать без чрезмерного воздействия в случае превышения допустимого порогового значения скорости.
Согласно вариантам осуществления погрузочно-разгрузочная машина или способ оповещения может включать одну или более из следующих характеристик.
Некоторые аспекты изобретения основаны на идее анализа энергетического состояния погрузочно-разгрузочной машины с учетом вклада потенциальной энергии гравитации и вклада кинетической энергии. Сточки зрения потенциальной энергии, устойчивость машины в гравитационном поле приводит к размещению текущего положения машины на дне потенциальной ямы, глубина которой может варьироваться в зависимости от массы и положения полезной нагрузки. С точки зрения кинетической энергии, скорость перемещения погрузочно-разгрузочной стрелы относительно основного корпуса приводит к созданию некоторого количества энергии, которая может с различной эффективностью передаваться на основной корпус в случае изменения механического взаимодействия между ними, например, если движение внезапно останавливается. Одной из идей изобретения является управление и/или предоставление оператору возможности управления этой кинетической энергией таким образом, чтобы она не превышала энергетический уровень, при котором она способна вывести погрузочно-разгрузочную машину из потенциальной ямы, обеспеченной ее устойчивым положением.
Краткое описание чертежей
Изобретение станет более понятным и его дальнейшие задачи, признаки и преимущества станут более очевидными из последующего описания нескольких конкретных вариантов осуществления изобретения, приведенных только в качестве неограничивающей иллюстрации со ссылкой на прилагаемые чертежи.
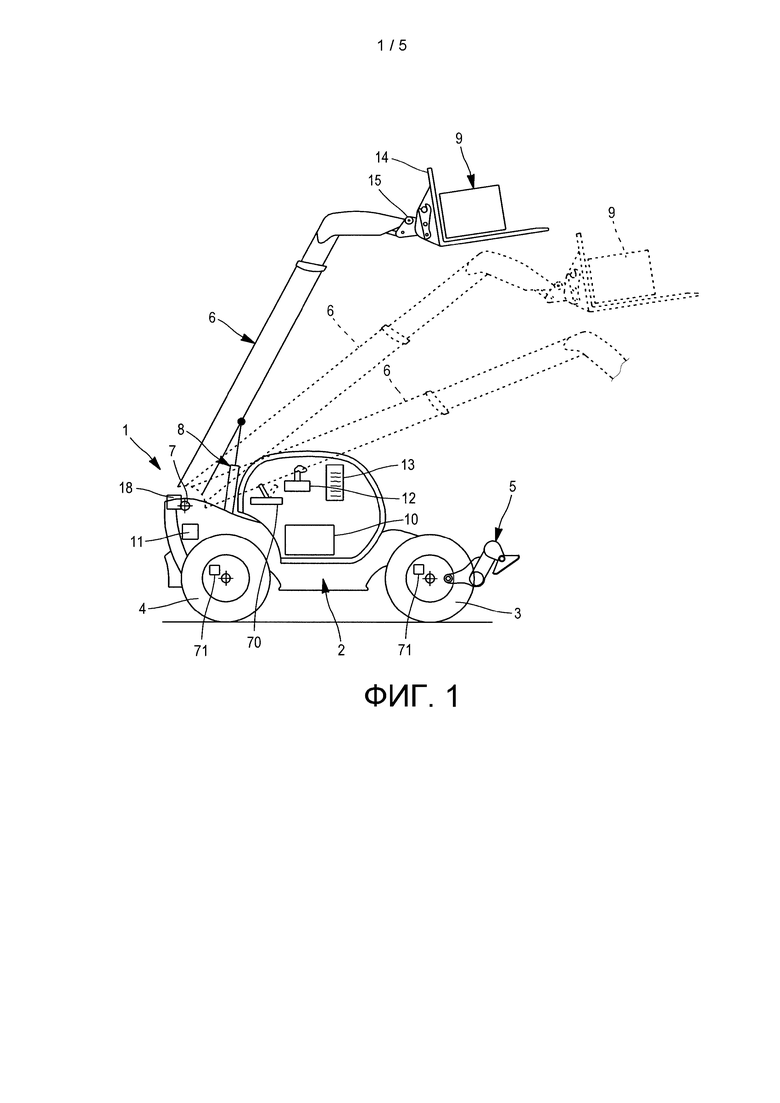
- На ФИГ. 1 представлено схематическое изображение телескопического погрузчика с вилочным захватом, в котором могут быть реализованы варианты осуществления изобретения.
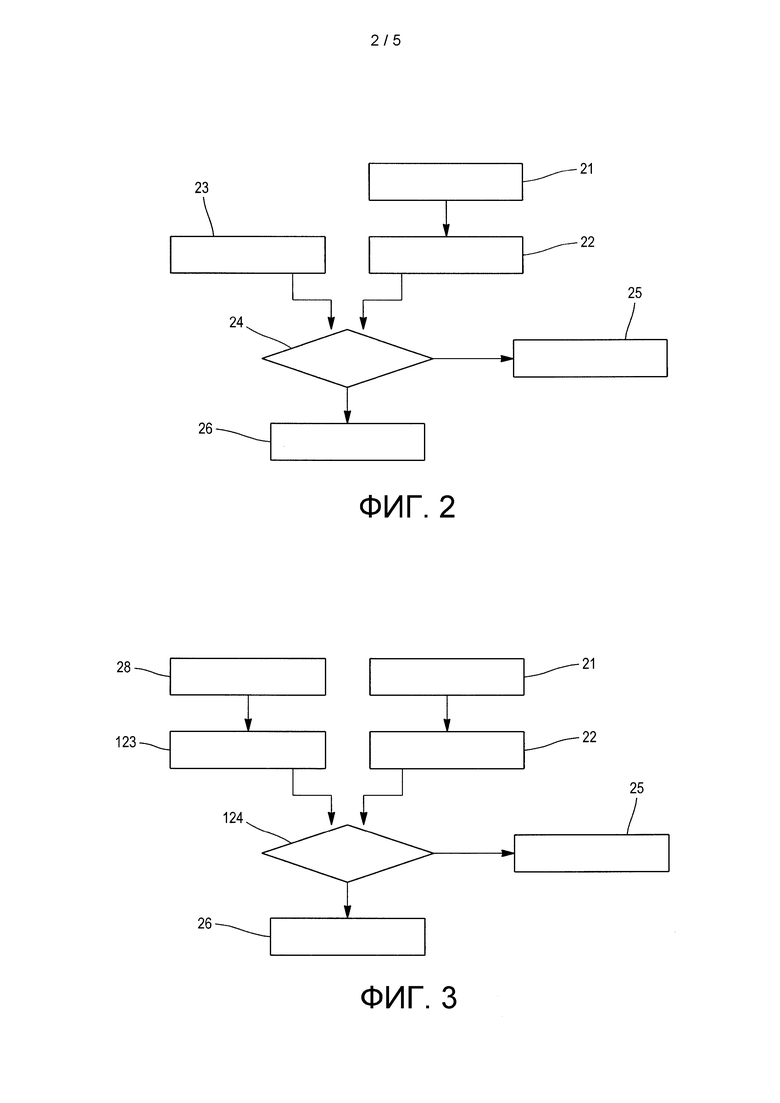
- На ФИГ. 2 представлена блок-схема, показывающая способ управления согласно первому варианту осуществления расширенного режима работы, который может быть использован на телескопическом погрузчике с вилочным захватом.
- На ФИГ. 3 представлена блок-схема, показывающая способ управления согласно второму варианту осуществления расширенного режима работы, который может быть использован на телескопическом погрузчике с вилочным захватом.
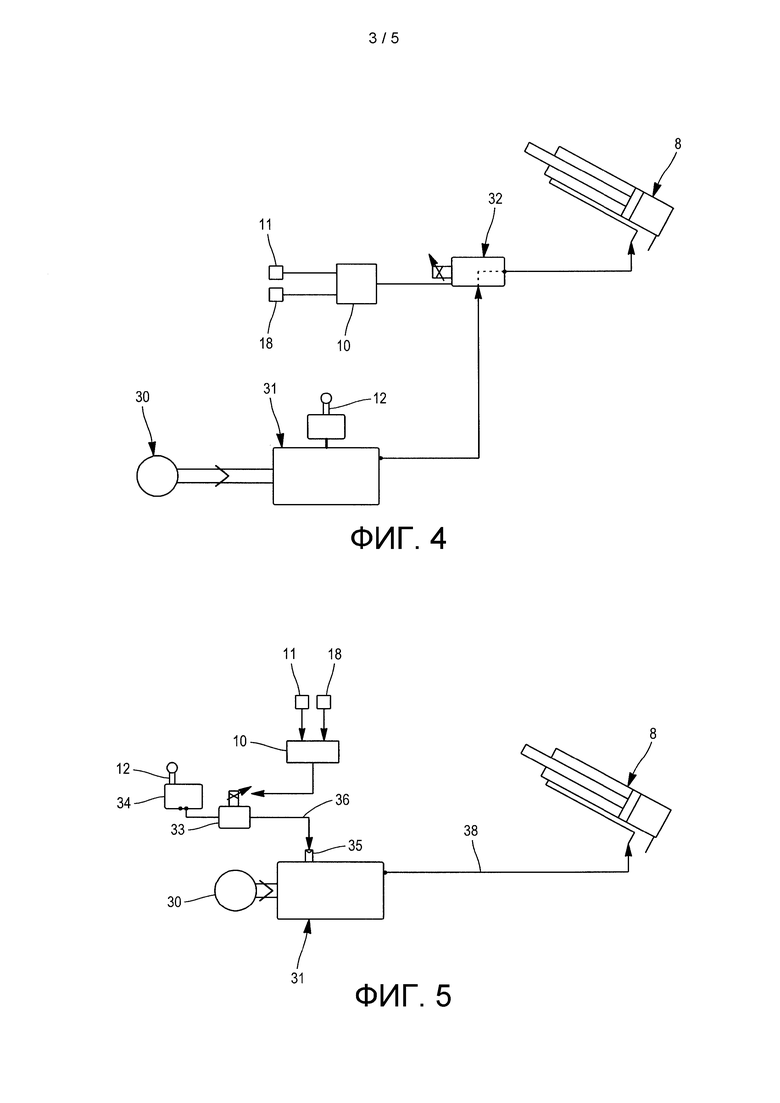
- На ФИГ. 4 представлено схематическое изображение гидравлического привода согласно первому варианту осуществления, который может быть использован на телескопическом погрузчике с вилочным захватом.
- На ФИГ. 5 представлено схематическое изображение гидравлического привода согласно второму варианту осуществления, который может быть использован на телескопическом погрузчике с вилочным захватом.
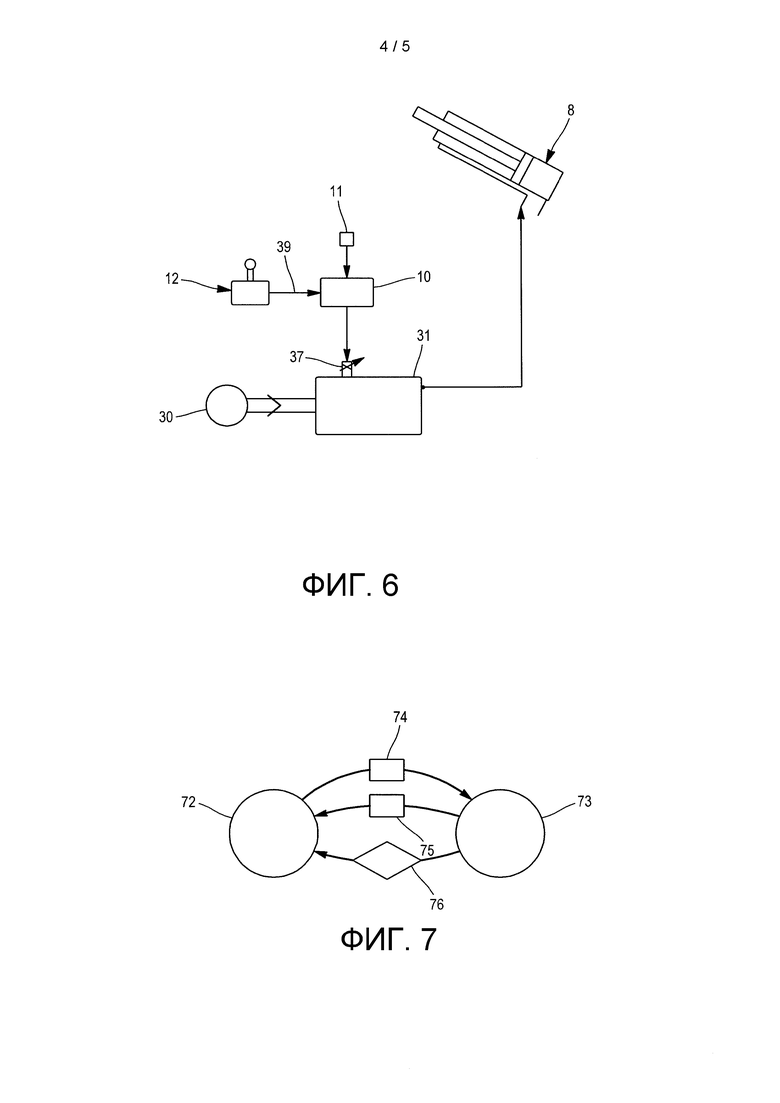
- На ФИГ. 6 представлено схематическое изображение гидравлического привода согласно третьему варианту осуществления, который может быть использован на телескопическом погрузчике с вилочным захватом.
- На ФИГ. 7 представлена схема, показывающая машину состояний, которая может быть использована на телескопическом погрузчике с вилочным захватом.
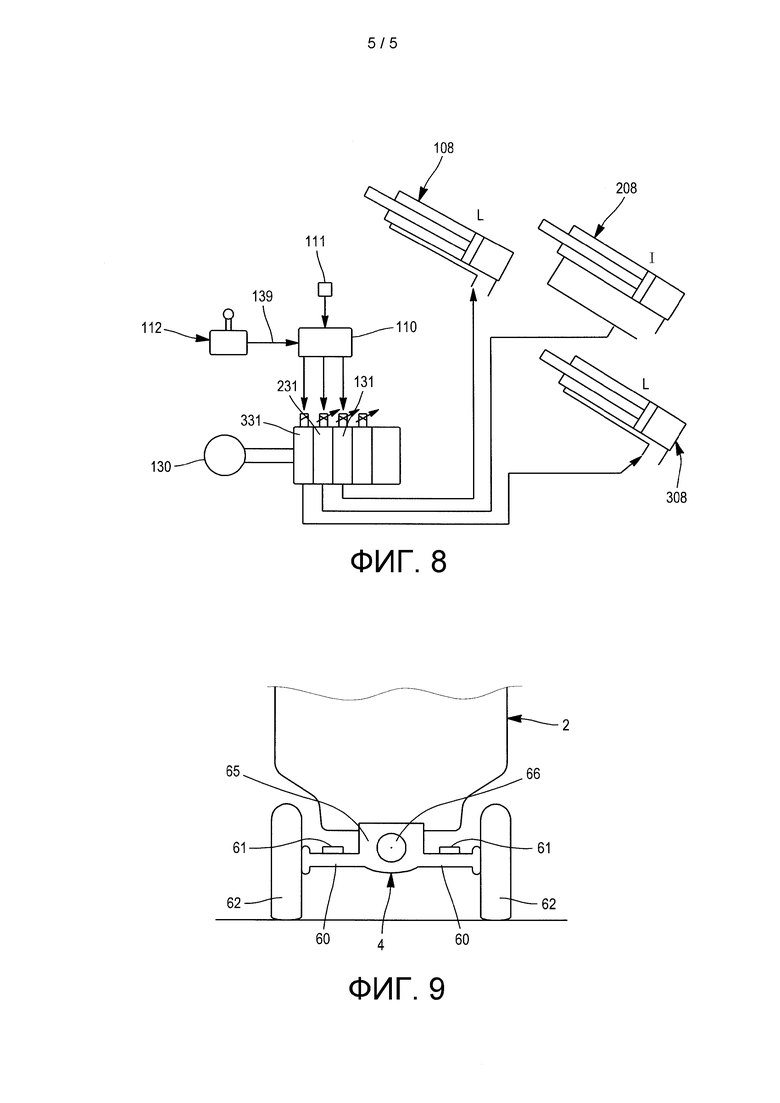
- На ФИГ. 8 представлено схематическое изображение гидравлического привода согласно четвертому варианту осуществления, который может быть использован на телескопическом погрузчике с вилочным захватом.
- На ФИГ. 9 представлено схематическое изображение полуосей колеса, оснащенных тензометром, который может быть использован в качестве датчика регистрации опрокидывающего момента.
Осуществление изобретения
Приведенное ниже описание относится к вариантам осуществления погрузочно-разгрузочной машины в виде передвижного телескопического погрузчика с вилочным захватом, имеющего погрузочно-разгрузочную стрелу, проходящую в направлении передней части транспортного средства. В такой конфигурации риск опрокидывания возникает в переднем направлении вокруг оси опрокидывания, образованной передними колесами транспортного средства. Таким образом, контроль этого риска опрокидывания и управление им включают учет сил инерции, ориентированных в переднем направлении, то есть перемещений, включающих значительное количество движения в этом направлении.
В погрузочно-разгрузочной машине, имеющей другую конфигурацию, ось опрокидывания может находиться в другом месте. Тогда перемещения, которые необходимо учитывать, необходимо выбирать в зависимости от местоположения этой оси.
Как показано на ФИГ. 1, телескопический погрузчик 1 с вилочным захватом содержит шасси 2, опирающееся на землю передней осью 3 и задней осью 4. При необходимости могут выпускаться стабилизирующие опоры 5 для подъема передней оси 3, и в этом случае стабилизирующие опоры 5 образуют ось опрокидывания в переднем направлении. Шасси 2 имеет относительно высокую массу благодаря своей конструкции и механическим элементам, которые оно удерживает, как известно из уровня техники.
Погрузочно-разгрузочная стрела 6 шарнирно закреплена на шасси 2 относительно горизонтальной оси 7. Подъемный привод, например, гидравлический цилиндр 8, обеспечивает возможность перемещения погрузочно-разгрузочной стрелы 6 вверх и вниз относительно горизонтальной оси 7 под контролем системы управления. Система управления содержит блок 10 управления и приводимый в действие оператором управляющий элемент 12, которые схематично показаны на ФИГ. 1.
На ФИГ. 1 показана погрузочно-разгрузочная стрела 6 и полезная нагрузка 9 в верхнем положении сплошными линиями, и в нескольких нижних положениях пунктирными линиями. При прочих равных условиях статический опрокидывающий момент, создаваемый погрузочно-разгрузочной стрелой 6 в переднем направлении, увеличивается по мере того, как его положение опускается в сторону горизонтального направления.
Измерение, показывающее этот статический опрокидывающий момент, может быть получено с помощью датчика регистрации опрокидывающего момента, который может быть расположен различными способами. На ФИГ. 1 показан датчик 11 регистрации опрокидывающего момента, расположенный на уровне задней оси, как известно из предшествующего уровня техники.
Датчик 11 регистрации опрокидывающего момента выдает измерительный сигнал, который показывает запас устойчивости погрузочно-разгрузочной машины 1 относительно оси опрокидывания.
Известный способ контроля риска опрокидывания и управления им включает обработку измерительного сигнала от датчика 11 регистрации опрокидывающего момента, с использованием блока 10 управления для визуального отображения оценки устойчивости в кабине машины, например на панели 13 дисплея, размещенной в кабине, и для прерывания опускания погрузочно-разгрузочной стрелы 6 при падении измерительного сигнала ниже заданного порогового значения. Однако из-за сил инерции, создаваемых при прерывании перемещения, этот способ требует, чтобы пороговое значение было установлено с высоким запасом безопасности, что ограничивает возможности машины, и/или чтобы команда на автоматическое замедление перемещения была дана до прерывания, что снимает с оператора управление скоростью.
Чтобы избежать этого, в расширенном рабочем режиме система управления может реализовывать способы управления, которые будут описаны со ссылкой на ФИГ. 2 и 3. Эти способы управления основаны на принципе, позволяющем оператору управлять движением погрузочно-разгрузочной стрелы 6 с помощью управляющего элемента 12. В частности, система управления регулирует скорость перемещения, подлежащего выполнению, в зависимости от запроса на перемещение, выдаваемого оператором посредством приведения в действие управляющего элемента 12, и, в частности, количественного значения, создаваемого воздействием оператора на управляющий элемент 12, и представляющего уровень скорости, запрошенный оператором. Например, количественное значение является углом наклона поворотного рычага управляющего элемента 12, причем больший угол представляет запрос на более высокую скорость, а нулевой угол наклона (нейтральное положение) представляет собой запрос на остановку. Система управления немедленно производит остановку перемещения по запросу на остановку, выданному оператором.
На ФИГ. 2 показан способ управления с использованием измерения фактической скорости погрузочно-разгрузочной стрелы 6. На ФИГ. 3 показан способ управления с использованием запроса скорости, выдаваемого оператором. Эти способы могут быть выполнены в цикле с помощью электронной схемы.
Способ по ФИГ. 2 включает следующие этапы:
Этап 21: получение измерительного сигнала от датчика 11 регистрации опрокидывающего момента.
Этап 22: определение допустимого порогового значения скорости в зависимости от измерительного сигнала. Это определение может быть основано на считывании таблицы, хранящейся в памяти и содержащей пороговые значения величин, связанных со значениями измерительного сигнала или диапазонами значений измерительного сигнала.
Этап 23: получение измерительного сигнала от датчика скорости погрузочно-разгрузочной стрелы 6. Этот датчик скорости представляет собой, например, датчик 18 угловой скорости, как показано на ФИГ. 1.
Этап 24: сравнение скорости погрузочно-разгрузочной стрелы 6 с допустимым пороговым значением скорости.
Если измеренная скорость ниже допустимого порогового значения скорости, следует этап 25: выполнение или продолжение выполнения перемещения в соответствии с запросом на перемещение, выдаваемым оператором.
Если измеренная скорость выше допустимого порогового значения скорости, следует этап 26: остановка или предотвращение перемещения погрузочно-разгрузочной стрелы 6, несмотря на запрос оператора. Эта остановка или предотвращение обусловлена тем, что оператор запросил скорость перемещения, которая является слишком высокой относительно запаса устойчивости, доступного в этот момент. Система управления не разрешает выполнение данного запроса. Другими словами, если перемещение осуществляется, оно немедленно прекращается, а если перемещение не осуществляется, то состояние остановки сохраняется, несмотря на запрос оператора.
Из состояния остановки, созданного на этапе 26, оператору предпочтительно необходимо выполнить конкретное возвратное действие, прежде чем он сможет сделать новый запрос на перемещение, например, новый запрос с более низкой скоростью. Это возвратное действие может предпочтительно выполняться с помощью управляющего элемента 12 из соображений эргономики. Например, возвратное действие состоит в возврате поворотного рычага в нейтральное положение перед тем, как снова наклонить его вперед.
Допустимое пороговое значение скорости, считываемое на этапе 22, может быть определено путем испытаний. При качественной оценке это допустимое пороговое значение скорости представляет количество движения или кинетическую энергию, которую погрузочно-разгрузочный погрузчик 1 способен воспринять без опрокидывания, если перемещение погрузочно-разгрузочной стрелы 6 останавливается мгновенно. Это допустимое пороговое значение скорости, следовательно, уменьшается во время опускания погрузочно-разгрузочной стрелы 6, так как запас устойчивости, указанный измерением от датчика 11 регистрации опрокидывающего момента, уменьшается. В другом варианте осуществления допустимое пороговое значение скорости может быть определено путем вычисления и сохранено или может быть определено путем вычисления в режиме реального времени на этапе 22.
Таким образом, один из описанных выше способов управления заключается в том, что, начиная с верхнего положения, показанного на ФИГ.1, если оператор выдает запрос на постоянное опускание, это перемещение выполняется с постоянной скоростью, пока допустимое пороговое значение скорости остается выше этой скорости, и прерывается мгновенно при превышении допустимого порогового значения скорости.
Поскольку система управления одинаково реагирует на запрос на данное перемещение и, в частности, не изменяет скорость перемещения, выполняемого в ответ на данный запрос, оператор, может опытным путем досконально овладеть откликом машины и корректировать свой запрос, чтобы наилучшим образом соответствовать обстоятельствам.
На ФИГ. 3 этапы, которые были изменены по сравнению со способом на ФИГ. 2, имеют ссылочные обозначения как на ФИГ. 2, увеличенные на 100. Неизмененные этапы имеют те же ссылочные обозначения и не описываются снова.
Этап 28: получение сигнала запроса на перемещение, выдаваемого оператором, например, в виде электрического сигнала.
Этап 123: определение запрошенной скорости перемещения в зависимости от сигнала запроса на перемещение. Например, запрошенная скорость закодирована в амплитуде или другом параметре сигнала запроса на перемещение.
Этап 124: сравнение запрошенной скорости перемещения с допустимым пороговым значением скорости.
Если запрошенная скорость ниже допустимого порогового значения скорости, выполняется этап 25.
Если запрошенная скорость превышает допустимое пороговое значение скорости, выполняется этап 26.
Следует понимать, что в этих способах не выполняется никакого перемещения, кроме перемещения в соответствии с запросом на перемещение, произведенным оператором.
Система управления, позволяющая осуществлять такой способ управления, может быть выполнена различными способами. Далее будут описаны три варианта осуществления со ссылкой на ФИГ. 4-6.
На ФИГ. 4 система управления подходит для реализации способа, показанного на ФИГ. 2. Не ней показан гидравлический цилиндр 8, источник 30 гидравлического давления, гидравлический золотниковый клапан 31, помещенный между ними для управления гидравлическим потоком, который должен подаваться в гидравлический цилиндр 8, управляющий элемент 12 в виде рычага, непосредственно соединенного с ползуном гидравлического золотникового клапана 31, блок 10 управления, датчик 11 регистрации опрокидывающего момента и датчик 18 угловой скорости, соединенный с блоком 10 управления, и электромагнитный клапан 32, помещенный между гидравлическим золотниковым клапаном 31 и гидравлическим цилиндром 8. Электромагнитный клапан 32 управляется блоком 10 управления.
В этой системе, поскольку блок управления не может предотвратить открытие гидравлического золотникового клапана 31 в соответствии с действием оператора, когда скорость является слишком высокой, электромагнитный клапан 32 используется для прерывания гидравлического потока и немедленной остановки перемещения на этапе 26.
Электромагнитный клапан 32 предпочтительно представляет собой клапан постепенного запуска. Использование клапана постепенного запуска обеспечивает возможность того, что перемещение при любом его возобновлении оператором после возвратного действия не происходит слишком быстро по сравнению со скоростью, измеренной датчиком 18 скорости.
На ФИГ. 5 элементы, аналогичные или идентичные элементам на ФИГ. 4, имеют одинаковые ссылочные обозначения. В этом варианте осуществления гидравлический золотниковый клапан 31 не имеет механического управления, связанного непосредственно с управляющим элементом 12, а имеет гидравлическое управление. В частности, гидравлический поток 38, соответствующий опусканию погрузочно-разгрузочной стрелы 6, может быть обеспечен путем подачи управляющего давления 36 в управляющее отверстие 35.
Управляющий элемент 12 соединен с управляющим клапаном 34, который управляет этим управляющим давлением. Блок 10 управления выполнен с возможностью управления электромагнитным клапаном 33, расположенным между управляющим клапаном 34 и управляющим отверстием 35. Таким образом, на этапе 26 блок 10 управления может переключить клапан 33, чтобы вернуть гидравлический золотниковый клапан 31 в нейтральное положение. Предпочтительно электромагнитный клапан 33 является клапаном постепенного запуска.
На ФИГ. 6 система управления пригодна для реализации способа, показанного на ФИГ. 3. Элемент 12 управления генерирует электрические сигналы 39 запроса, и гидравлический золотниковый клапан 31 управляется с использованием электрического сигнала, подаваемого на управляющее отверстие 37. Блок 10 управления помещен между управляющим элементом 12 и гидравлическим золотниковым клапаном 31 и, следовательно, может непосредственно управлять гидравлическим золотниковым клапаном 31 на этапах 25 и 26. Датчик скорости погрузочно-разгрузочной стрелы 6 не является существенным в данном варианте осуществления, так как блок 10 управления может определять запрашиваемую скорость непосредственно из сигнала 39 запроса.
На ФИГ. 7 показана машина состояний, которая может быть реализована блоком 10 управления для выборочной активации расширенного режима работы, описанного выше, и простого режима работы.
Более конкретно, машина состояний содержит состояние 72 «расширенного режима работы», в котором блок 10 управления реализует описанный выше расширенный режим работы для учета силы инерции, в частности, в условиях, в которых прогнозирование сил инерции на основе скорости имеет некоторую степень точности благодаря тому, что шасси 2 является неподвижным, и состояние 73 «простого режима работы», в котором блок 10 управления реализует другой режим работы без учета скорости перемещения погрузочно-разгрузочной стрелы. Простой режим работы, тем не менее, гарантирует определенную устойчивость телескопического погрузчика с вилочным захватом.
В состоянии 73 блок 10 управления реализует способ управления погрузочно-разгрузочной стрелой 6 по существу основанный, например, на измерении опрокидывающего момента, который выполняет запрошенное перемещение, когда опрокидывающий момент ниже заданного порогового значения, и останавливает перемещение, как только опрокидывающий момент преодолевает это пороговое значение. Условием остановки, таким образом, является преодоление заданного порогового значения измерительным сигналом регистрации опрокидывающего момента. Что касается датчика 11, расположенного на уровне задней оси, его измерительный сигнал (возникающий, например, в результате изгиба полуоси колеса) будет уменьшаться при увеличении опрокидывающего момента. Следовательно, условием остановки может быть, в частности, измерительный сигнал от датчика 11, который опускается ниже порогового значения. Следует понимать, что запрашиваемое перемещение может быть комбинацией перемещений и не ограничивается отдельным перемещением.
На ФИГ. 1 показан элемент 70 выбора в кабине телескопического погрузчика с вилочным захватом. Элемент 70 выбора предназначен для приведения в действие оператором, чтобы выбирать расширенный режим работы или простой режим работы по своему выбору. Таким образом, как показано на ФИГ. 7, в состоянии 72 оператор может выполнить с элементом 70 выбора первое действие 74 для переключения в состояние 73. Аналогичным образом, в состоянии 73 оператор может выполнить с элементом 70 выбора второе действие 75 для переключения в состояние 72. В зависимости от того, как фактически выполнен элемент 70 выбора, первое действие 74 и второе действие 75 могут быть последовательными во времени идентичными действиями, например, в случае, если элемент 70 выбора является нажимной кнопкой, которая при каждом последующем нажатии на нее выполняет поочередное переключение в состояние 72 и состояние 73. И наоборот, первое действие 74 и второе действие 75 могут быть различающимися действиями, например, если элемент 70 выбора является бистабильным элементом, который можно выборочно перемещать в первое фиксированное положение для переключения в состояние 72, и во второе фиксированное положение для переключения в состояние 73.
На ФИГ. 7 также показано, что в состоянии 73 блок 10 управления постоянно проверяет условие 76 возврата, чтобы вернуться в состояние 72, как только условие 76 возврата выполнено.
Условие возврата основано на обнаружении того, что шасси 2 телескопического погрузчика с вилочным захватом находится по существу в неподвижном состоянии в течение времени, превышающем заданное пороговое значение. Один критерий, который может применяться для обнаружения по существу неподвижного состояния, состоит в том, что поступательная скорость шасси 2 находится ниже заданного порогового значения, например, составляет 0,3 м/с. Для проверки условия 76 возврата блок управления может измерять величину, представляющую поступательную скорость шасси 2, и сравнивать эту величину с заданным пороговым значением.
Условие 76 возврата также может содержать несколько альтернативных или совокупных условий в предположении, что корпус машины по существу неподвижен. В одном варианте осуществления условие 76 возврата также выполняется, как только обнаруживается одно из следующих событий:
- приведение в действие парковочного тормоза,
- отключение трансмиссии (вывод из зацепления электромагнитным клапаном или электрическим реле управления),
- опускание стабилизирующих опор 5, так чтобы они опирались на землю, демонстрируя намерение придать машине устойчивость путем отрыва колес от земли.
Для измерения величины, представляющей поступательную скорость шасси 2, можно использовать несколько методов, например, с применением измерений, обеспечиваемых одним или более датчиками 71 скорости колеса, которые схематически показаны на ФИГ. 1.
Пороговое значение длительности может быть установлено в зависимости от требований данной заявки, например, от 1 с до 1000 с, предпочтительно от 5 с до 100 с.
Могут быть предусмотрены и другие системы управления в зависимости от характера привода, которым нужно управлять. Погрузочно-разгрузочная стрела 6 может иметь другие степени свободы движения, помимо поворота вокруг горизонтальной оси 7, в частности, степень свободы телескопического линейного перемещения и степень свободы поворота рабочего органа вокруг горизонтальной оси 15. Описанные выше способы управления могут использоваться для управления одним или более из этих степеней свободы движения. При наличии нескольких степеней свободы движения не все приводы, ответственные за выполнение соответствующих перемещений, обязательно управляются одинаковым образом. Следует понимать, что запрашиваемое перемещение может быть комбинацией перемещений и не ограничивается одиночным перемещением.
На ФИГ. 8 показана другая система управления перемещениями погрузочно-разгрузочной стрелы 6. Согласно этой системе показано три привода, отвечающих за перемещения с тремя различными степенями свободы, а именно:
- привод 108 подъема/опускания, отвечающий за поворотные перемещения вокруг оси 7, обозначенные подъемом L+ и опусканием L-, управляемый гидравлическим золотниковым клапаном 131,
- телескопический привод 308, отвечающий за поступательные перемещения вдоль оси погрузочно-разгрузочной стрелы 6, обозначенные выдвижением Т+ и втягиванием Т-, управляемый гидравлическим золотниковым клапаном 231, и
- привод 208 рабочего органа, отвечающий за поворотные перемещения рабочего органа вокруг оси 15, обозначенные подъемом I+ и опусканием I-, управляемый гидравлическим золотниковым клапаном 331.
В качестве иллюстрации гидравлические золотниковые клапаны 131, 231, 331 являются электрически управляемыми золотниковыми клапанами. Для обозначения идентичных или похожих элементов используются те же ссылочные обозначения, что и на ФИГ. 6.
Способы остановки перемещений, описанные выше, также могут применяться к перемещению L- опускания, как уже было описано, и к перемещению Т+ выдвижения и, в некоторых случаях, к другим перемещениям.
Когда блок 10 управления останавливает или автоматически предотвращает перемещение из-за того, что выполнено условие остановки, оператор все же может выполнять перемещения с некоторыми степенями свободы, в то время как другие запрещены. Предпочтительно перемещение L+ подъема и перемещение Т- втягивания при этом все же могут выполняться, поскольку они способствуют уменьшению опрокидывающего момента.
Степени свободы движения, которое при этом все же может осуществляться при выполнении условия остановки для одного перемещения, не обязательно одинаковы в состоянии 72 и состоянии 73. Например, если условие остановки для перемещения L- опускания выполняется в состоянии 72 (выбран расширенный режим работы), перемещения I+ подъема и I- опускания также запрещены, при этом эти перемещения все же могут выполняться, если условие остановки для перемещения L- опускания выполняется в состоянии 73 (выбран простой режим работы).
На ФИГ. 9 показан вариант осуществления задней оси 4 телескопического погрузчика 1 с вилочным захватом. Задняя ось 4 содержит две полуоси 60 колеса, удерживающих задние колеса 62. Одна или каждая из полуосей 60 колеса снабжена тензометром 61, выполненным с возможностью измерения деформации полуоси 60 колеса при изгибе. Более конкретно, тензометр 61 измеряет изменение по длине между двумя контактами, разнесенными на полуосях 60 колеса. Измерительные сигналы от тензометров 61 могут использоваться для формирования сигнала, показывающего опрокидывающий момент, например, как среднее двух измерительных сигналов. В альтернативном варианте может использоваться один тензометр 61 для формирования сигнала, показывающего опрокидывающий момент. Задняя ось 4 предпочтительно соединена маятниковым образом с шасси 2 посредством шарнира 66, имеющего продольную ось, проходящую через центральную часть 65 оси.
Некоторые показанные элементы, в частности блок управления, могут быть выполнены в различных формах, по отдельности или целиком, с помощью аппаратных и/или программных компонентов. К аппаратным компонентам, которые могут быть использованы, относятся специализированные интегральные схемы (ASIC), программируемые вентильные матрицы (FPGA) или микропроцессоры. Программные компоненты могут быть написаны на разных языках программирования, например С, С++, Java или VHDL. Этот список не является исчерпывающим.
Способы и системы, описанные выше в контексте телескопического погрузчика с вилочным захватом, применимы к другим погрузочно-разгрузочным машинам.
Хотя изобретение было описано со ссылкой на несколько конкретных вариантов осуществления, очевидно, что оно никоим образом не ограничено этим, и что оно включает все технические эквиваленты описанных средств и любые их комбинации, если они попадают в объем изобретения.
Использование глагола «включает» или «содержит» и его сопряженных форм не исключает наличия элементов или этапов, отличающихся от указанных в формуле изобретения. Использование единственного числа для элемента или этапа не исключает, если не указано иное, наличия множества таких элементов или этапов.
В формуле изобретения никакое ссылочное обозначение в скобках не может истолковываться, как ограничивающее формулу изобретения.
Изобретение относится к управлению погрузочно-разгрузочной машиной. Погрузочно-разгрузочная машина (1) содержит подвижный основной корпус (2) и погрузочно-разгрузочную стрелу (6), предназначенную для приема груза, подлежащего перемещению. Исполнительное устройство выполнено с возможностью осуществления перемещения погрузочно-разгрузочной стрелы относительно основного корпуса. Управление включает: измерение параметра, показывающего опрокидывающую силу, приложенную к основному корпусу, относительно оси опрокидывания, и остановку или предотвращение выполняемого или запрашиваемого перемещения погрузочно-разгрузочной стрелы, когда выполнено условие остановки. Условие остановки зависит от параметра, показывающего измеренную опрокидывающую силу, если выбран расширенный режим работы, условие остановки также зависит от параметра, представляющего скорость перемещения погрузочно-разгрузочной стрелы. Достигается возможность сохранения устойчивости машины, в частности, с учетом сил инерции. 2 н. и 13 з.п. ф-лы, 9 ил.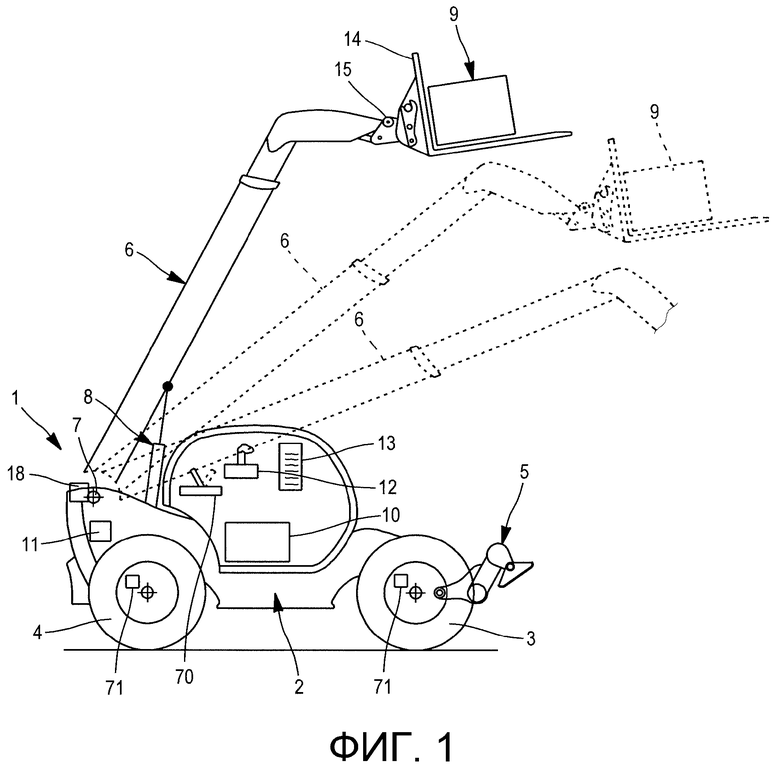
1. Способ управления для управления исполнительным устройством (8) в погрузочно-разгрузочной машине (1), содержащей подвижный основной корпус (2) и погрузочно-разгрузочную стрелу (6), предназначенную для приема груза (9), подлежащего перемещению, причем исполнительное устройство выполнено с возможностью осуществления перемещения погрузочно-разгрузочной стрелы относительно основного корпуса,
при этом способ включает:
измерение (21) величины, показывающей опрокидывающий момент, приложенный к основному корпусу, относительно оси опрокидывания, и
остановку или предотвращение (26) выполняемого или запрашиваемого перемещения погрузочно-разгрузочной стрелы, как только выполнено условие остановки, причем условие остановки зависит от измеренной величины, показывающей опрокидывающий момент,
причем, если выбран (72) расширенный режим работы, условие остановки также зависит от величины, представляющей скорость перемещения погрузочно-разгрузочной стрелы,
а если выбран (73) простой режим работы, условие остановки не зависит от величины, представляющей скорость перемещения погрузочно-разгрузочной стрелы.
2. Способ по п. 1, также включающий:
выбор расширенного режима работы в ответ на первое воздействие (75) оператора на элемент выбора, и
выбор простого режима работы (73) в ответ на второе воздействие оператора на элемент выбора.
3. Способ по п. 2, также включающий:
выбор расширенного режима работы в ответ на обнаружение (76) того факта, что основной корпус остается по существу в неподвижном состоянии в течение времени, превышающего заданное пороговое значение.
4. Способ по п. 3, также включающий:
измерение величины, представляющей поступательную скорость основного корпуса, и
обнаружение (76) того, что основной корпус остается по существу в неподвижном состоянии в зависимости от величины, представляющей поступательную скорость основного корпуса.
5. Способ по любому из пп. 1-4, также включающий:
выбор расширенного режима работы в ответ на обнаружение (76) приведения в действие парковочного тормоза, отключения трансмиссии или опускания стабилизирующих опор, так чтобы они опирались на землю.
6. Способ по любому из пп. 1-5, также включающий:
измерение (23) мгновенной скорости погрузочно-разгрузочной стрелы относительно основного корпуса в качестве величины, представляющей скорость перемещения погрузочно-разгрузочной стрелы.
7. Способ по любому из пп. 1-5, также включающий:
прием (28) сигнала запроса на перемещение, предназначенного для воздействия на исполнительное устройство, чтобы обеспечить перемещение погрузочно-разгрузочной стрелы, выполняемое исполнительным устройством, причем сигнал запроса на перемещение имеет параметр, представляющий скорость перемещения, подлежащего выполнению,
определение (123) величины, представляющей скорость перемещения погрузочно-разгрузочной стрелы в зависимости от параметра сигнала запроса на перемещение.
8. Способ по любому из пп. 1-7, в котором, если выбран расширенный режим работы, способ также включает:
определение (22) порогового значения, представляющего максимальную допустимую скорость в зависимости от величины, показывающей опрокидывающий момент,
сравнение (24, 124) величины, представляющей скорость выполняемого или подлежащего выполнению перемещения с пороговым значением, представляющим максимальную допустимую скорость, и
управление исполнительным устройством в зависимости от результата указанного сравнения, чтобы:
выполнять или продолжать (25) перемещение погрузочно-разгрузочной стрелы пока величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, ниже указанного порогового значения, представляющего максимальную допустимую скорость, и
предотвращать или останавливать (26) перемещение погрузочно-разгрузочной стрелы, как только величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, становится выше указанного порогового значения, представляющего максимальную допустимую скорость.
9. Способ по п. 8, в котором пороговое значение, представляющее максимальную допустимую скорость, уменьшается, если опрокидывающий момент увеличивается.
10. Способ по любому из пп. 1-9, в котором, если выбран (73) простой режим работы, способ также включает:
предотвращение или остановку перемещения погрузочно-разгрузочной стрелы, как только величина, показывающая опрокидывающий момент, превысит заданное пороговое значение.
11. Погрузочно-разгрузочная машина (1), содержащая:
основной корпус (2),
погрузочно-разгрузочную стрелу (6), предназначенную для приема груза, подлежащего перемещению,
исполнительное устройство (8), выполненное с возможностью осуществления перемещения погрузочно-разгрузочной стрелы относительно основного корпуса,
датчик (11) регистрации опрокидывающего момента, чувствительный к величине, показывающей опрокидывающий момент, приложенный к основному корпусу, относительно оси опрокидывания,
блок (10) управления, выполненный с возможностью управления исполнительным устройством, так чтобы останавливать или предотвращать (26) выполняемое или запрашиваемое перемещение погрузочно-разгрузочной стрелы, как только выполнено условие остановки, причем условие остановки зависит от измеренной величины, показывающей опрокидывающий момент, и
элемент (70) выбора, который выполнен с возможностью приведения в действие оператором для выбора простого режима работы и расширенного режима работы,
причем, если выбран расширенный режим работы, условие остановки, используемое блоком (10) управления, также зависит от величины, представляющей скорость выполняемого или запрашиваемого перемещения погрузочно-разгрузочной стрелы,
а если выбран простой режим работы, условие остановки не зависит от величины, представляющей скорость перемещения погрузочно-разгрузочной стрелы.
12. Машина по п. 11, в которой элемент (70) выбора выполнен с возможностью:
выбора (75) расширенного режима работы в ответ на первое воздействие оператора на элемент выбора, и
выбора (73) простого режима работы в ответ на второе воздействие оператора на элемент выбора.
13. Машина по п. 11 или 12, в которой блок (10) управления выполнен с возможностью выбора расширенного режима работы в ответ на обнаружение (76) того факта, что основной корпус оставался по существу в неподвижном состоянии в течение времени, превышающего заданное пороговое значение.
14. Машина по п. 13, также содержащая:
датчик (71) поступательной скорости, выполненный с возможностью измерения величины, представляющей поступательную скорость основного корпуса, и
причем блок (10) управления выполнен с возможностью обнаружения (76), что основной корпус оставался по существу в неподвижном состоянии в зависимости от величины, представляющей поступательную скорость основного корпуса.
15. Машина по любому из пп. 11-14, также содержащая средство (18) измерения мгновенной скорости погрузочно-разгрузочной стрелы (6) относительно основного корпуса в качестве величины, представляющей скорость перемещения погрузочно-разгрузочной стрелы.
| Установка для переработки золошлаковых отходов | 2019 |
|
RU2736833C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ФУНКЦИОНИРОВАНИЯ НАЗЕМНОГО МОБИЛЬНОГО ИЗМЕРИТЕЛЬНОГО КОМПЛЕКСА ПРИ ЭКСПЛУАТАЦИИ | 2004 |
|
RU2263965C1 |
| СИНТЕТИЧЕСКИЙ КАНАТ | 2008 |
|
RU2390595C1 |
| 0 |
|
SU171471A1 | |
| Способ повышения дебита скважин | 1944 |
|
SU65832A1 |

