Изобретение относится к технике стендовых испытаний и может быть использовано для исследования рабочих органов погрузчиков, преимущественно погрузчиков с вильчатыми органами непрерывного действия.
Известен стенд для исследования рабочих органов погрузчика, содержащий станину с рамой для установки рабочих органов, механизм регулировки их положения в вер- тикальной плоскости и силовую установку.
Известный стенд не позволяет исследовать вильчатые рабочие органы.
Цель изобретения - расширение технологических возможностей путем обеспече- ния возможности исследования вильчатых рабочих органов.
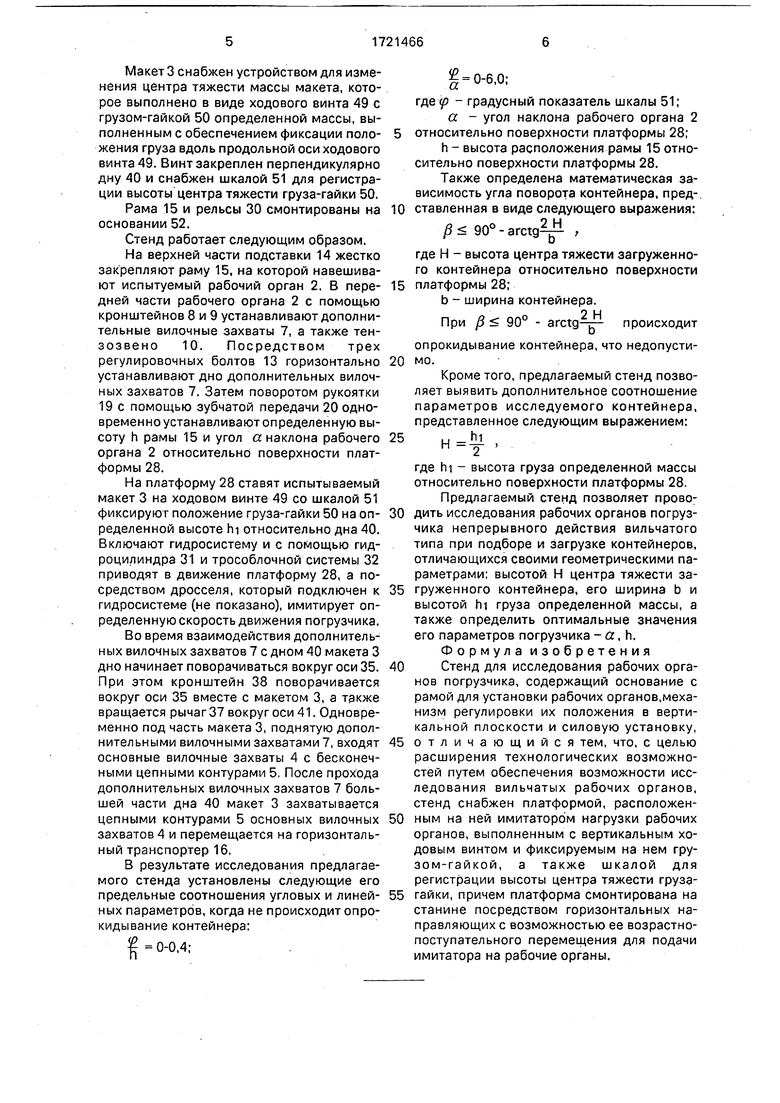
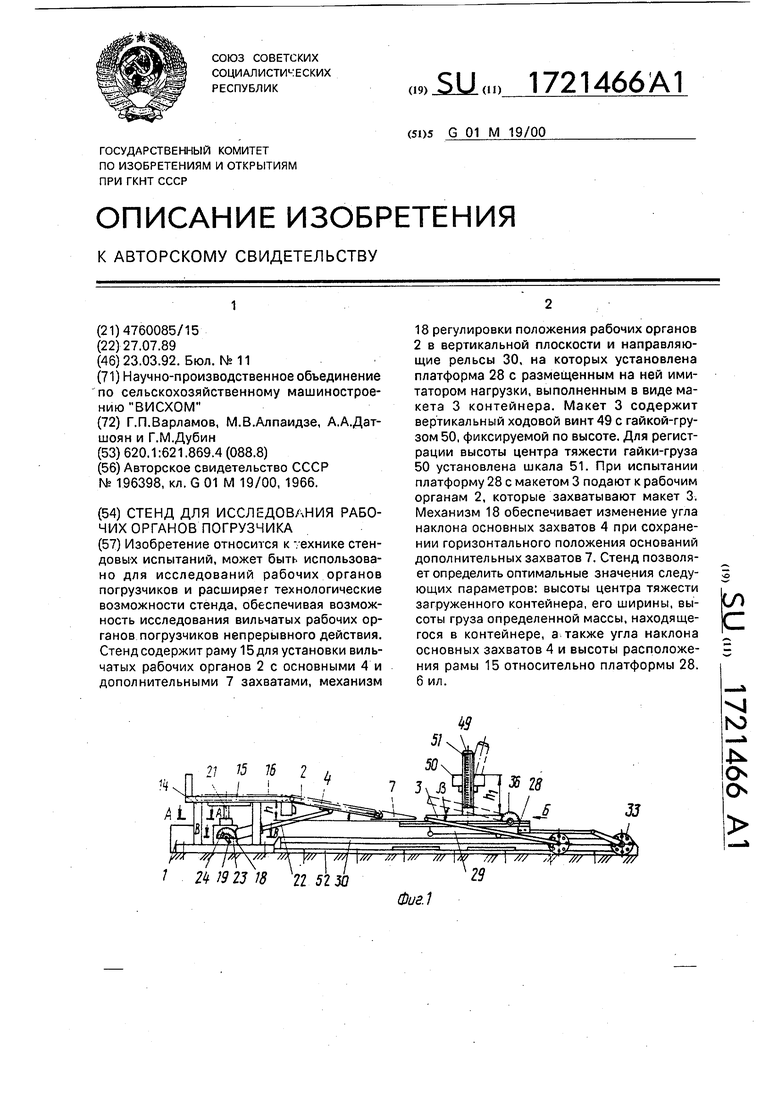
На фиг. 1 изображен предлагаемый стенд, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг, 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - стенд, вид сверху; на фиг. 6 - разрез Г-Г на фиг. 5.
Стенд содержит силовую установку 1, испытуемый рабочий орган 2, предназна- ченный для подбора и загрузки контейнеров (или пакетов, закрепленных на стандартном поддоне размером 1200x800 мм) и имитатор нагрузки в виде макета 3 и контейнера. Рабочий орган 2 содержит два основных жестко закрепленных между собой вилочных захвата 4 с бесконечными цепными контурами 5 с приводом от гидромотора 6, дополнительные вилочные захваты 7, соединенные с основными вилочными захватами 4 с помощью кронштейнов 8 и 9 итензозвено 10 вала 11, который по концам закреплен в обоймах 12. На валу 11 установлены три регулировочных болта 13 для установки дополнительных вилочных захватов 7 в горизонтальное положение.
Стенд имеет подставку 14, которая состоит из двух частей, они соединены между собой шарнирно в виде ласточкина хвоста. В верхней части подставка 14 жестко за- креплена к раме 15, на которой расположен горизонтальный цепной транспортер 16, приводимый в движение гидромотором 6 и цепной передачей 17. К передней части рамы 15 шарнирно присоединен рабочий ор- ган 2.
Под рамой 15 расположен механизм 18 регулировки положения рабочего органа в вертикальной плоскости. .Механизм содержит рукоятку 19 для привода передачи 20 (фиг.4). Последняя предназначена для изменения положения вертикальной 21 и наклонной 22 штанг, на которых с одной стороны нарезаны зубья так, что когда вертикальная штанга 21 перемещается вверх,
то наклонная штанга 22 одновременно наклоняется вниз. При этом штанга 21 упирается в дно рамы 15, а штанга 22 другим свободным концом шарнирно соединена с рабочим органом 2. На корпусе механизма 18 закреплена оттарированная угловая шкала 23. Стрелка 24 шкалы 23 жестко соединена с осью 25 посредством зубчатого колеса 26, взаимодействующего с зубьями вертикальной штанги 21 с помощью зубчатой передачи 27, что обеспечивает одновременное показание высоты расположения h рамы 15 и угол а наклона рабочего органа 2 относительно поверхности платформы 28.
Платформа 28 установлена на ходовой части29, которая расположена на направляющих в виде рельс 30 с обеспечением воз- вратно-поступательного движения с помощью гидроцилиндра 31 и трособлочной системы 32. Сзади ходовой части 29 закреплено путеизмерительное колесо 33 с индивидуальным датчиком 34 для определения имитируемой рабочей скорости погрузчика. На платформе 28 вдоль оси 35 поворота контейнера (фиг.5) закреплено приспособление с градусной шкалой 36 для измерения угла Р поворота контейнера вокруг оси 35.
Рычаг 37 свободным концом опирается на кронштейн 38 (фиг.5), закрепленный на опоре 39 дна 40 макета 3 (фиг.4). Второй конец рычага 37 размещен на оси 41, которая совпадает с осью 35, и прижат к опоре 42 с помощью шайбы 43 и гайки 44. Коэффициент трения в месте соединения опоры 42, рычага 37 и шайбы 43 должен быть выбран таким, чтобы после подбора контейнера 3 обеспечивался поворот рычага 37 вокруг оси 41 и фиксирование угла ft поворота контейнера 3 вокруг оси 35.
Рычаг 37 свободным концом опирается за кронштейн 38 (фиг.5), закрепленный на опоре 39 дна 40 макета 3 (фиг.4). Второй конец рычага 37 размещен на оси 41, которая совпадает с осью 35, и прижат к опоре 42 с помощью шайбы 43 и гайки 44. Коэффициент трения в месте соединения опоры 42, рычага 37 и шайбы 43 должен быть выбран таким, чтобы после подбора.контейнера 3 обеспечивался поворот рычага 37 вокруг оси 41 и фиксирование угла/ поворота контейнера 3 вокруг оси 35.
К кронштейну 38 с помощью шарнира 45 и рычага 46 присоединено второе путеизмерительное колесо 47 с индивидуальным датчиком 48, предназначенным для определения горизонтальной составляющей скорости перемещения макета 3 на рабочем органе 2.
Макет 3 снабжен устройством для изменения центра тяжести массы макета, которое выполнено в виде ходового винта 49 с грузом-гайкой 50 определенной массы, выполненным с обеспечением фиксации положения груза вдоль продольной оси ходового винта 49. Винт закреплен перпендикулярно дну 40 и снабжен шкалой 51 для регистрации высоты центра тяжести груза-гайки 50.
Рама 15 и рельсы 30 смонтированы на основании 52,
Стенд работает следующим образом.
На верхней части подставки 14 жестко закрепляют раму 15, на которой навешивают испытуемый рабочий орган 2. В передней части рабочего органа 2 с помощью кронштейнов 8 и 9 устанавливают дополнительные вилочные захваты 7, а также тен- зозвено 10. Посредством трех регулировочных болтов 13 горизонтально устанавливают дно дополнительных вилочных захватов 7. Затем поворотом рукоятки 19с помощью зубчатой передачи 20 одновременно устанавливают определенную высоту h рамы 15 и угол «наклона рабочего органа 2 относительно поверхности платформы 28.
На платформу 28 ставят испытываемый макет 3 на ходовом винте 49 со шкалой 51 фиксируют положение груза-гайки 50 на определенной высоте hi относительно дна 40. Включают гидросистему и с помощью гидроцилиндра 31 и трособлочной системы 32 приводят в движение платформу 28, а посредством дросселя, который подключен к гидросистеме (не показано), имитирует определенную скорость движения погрузчика.
Во время взаимодействия дополнительных вилочных захватов 7 с дном 40 макета 3 дно начинает поворачиваться вокруг оси 35. При этом кронштейн 38 поворачивается вокруг оси 35 вместе с макетом 3, а также вращается рычаг 37 вокруг оси 41. Одновременно под часть макета 3, поднятую дополнительными вилочными захватами 7, входят основные вилочные захваты 4 с бесконечными цепными контурами 5, После прохода дополнительных вилочных захватов большей части дна 40 макет 3 захватывается цепными контурами 5 основных вилочных захватов 4 и перемещается на горизонтальный транспортер 16.
В результате исследования предлагаемого стенда установлены следующие его предельные соотношения угловых и линейных параметров, когда не происходит опрокидывание контейнера:
1-0-0.4:
§ 0-6,0;
где# - градусный показатель шкалы 51;
а - угол наклона рабочего органа 2 относительно поверхности платформы 28;
h - высота расположения рамы 15 относительно поверхности платформы 28.
Также определена математическая зависимость угла поворота контейнера, пред-. ставленная в виде следующего выражения:
Ј 90° - arctg i ,
где Н - высота центра тяжести загруженного контейнера относительно поверхности платформы 28;
b - ширина контейнера.
2 Н При / 90° - arctg-j- происходит
опрокидывание контейнера, что недопустимо.
Кроме того, предлагаемый стенд позволяет выявить дополнительное соотношение параметров исследуемого контейнера, представленное следующим выражением:
и гп
н-т
где hi - высота груза определенной массы относительно поверхности платформы 28. Предлагаемый стенд позволяет проводить исследования рабочих органов погрузчика непрерывного действия вильчатого типа при подборе и загрузке контейнеров, отличающихся своими геометрическими параметрами: высотой Н центра тяжести загруженного контейнера, его ширина b и высотой hi груза определенной массы, а также определить оптимальные значения его параметров погрузчика - а, h. Формула изобретения
Стенд для исследования рабочих органов погрузчика, содержащий основание с рамой для установки рабочих органов,механизм регулировки их положения в вертикальной плоскости и силовую установку,
отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения возможности исследования вильчатых рабочих органов, стенд снабжен платформой, расположенным на ней имитатором нагрузки рабочих органов, выполненным с вертикальным ходовым винтом и фиксируемым на нем грузом-гайкой, а также шкалой для регистрации высоты центра тяжести грузагайки, причем платформа смонтирована на станине посредством горизонтальных направляющих с возможностью ее возрастно- поступательного перемещения для подачи имитатора на рабочие органы.
А--А
Видб
/
И
Фив.г
Фие.З
39
Р 20
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРЕЙФЕРНОЕ УСТРОЙСТВО ДЛЯ ВИЛОЧНОГО ПОГРУЗЧИКА | 1991 |
|
RU2011629C1 |
| Навесной вилочный погрузчик | 2021 |
|
RU2764788C1 |
| Погрузчик с вильчатым захватом | 1980 |
|
SU1010002A1 |
| Навесной вилочный погрузчик | 2021 |
|
RU2768979C1 |
| Подъемная платформа | 1990 |
|
SU1730023A1 |
| Подъемник | 1990 |
|
SU1801941A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ВИЛОЧНОГО ПОГРУЗЧИКА | 1991 |
|
RU2011636C1 |
| Агрегат для проведения выработок большого сечения | 1979 |
|
SU911038A1 |
| Поъемник | 1990 |
|
SU1791368A1 |
| УСТРОЙСТВО ДЛЯ СБОРА БЫТОВОГО МУСОРА ИЛИ АНАЛОГИЧНОГО МАТЕРИАЛА | 1991 |
|
RU2067068C1 |
8 1013 ц
ФивМ
25
П 1 1 3 3 3 35 I I / I
32
i / 45 37 У W V
т 3d
