1
(21)4324788/24-07
(22)04,11.87
(46) 30.09,89. Бюл. № 36
(71)Ленинградское отделение Всесоюзного проектно-изыскательского и научно-исследовательского института Гидропроект им., С.Я.Жука
(72)Л.Б.Рутковский
(53)621.316.729(088.8)
(56)Авторское свидетельство СССР № I0i2389, кл. Н 02 J 3/42, 1980.
Авторское свидетельство СССР № 1173489, кл. Н 02 J 3/42, 1983.
Авторское свидетельство СССР № 1116495, кл. Н 02 J. .3/42, 1983.
(54)СПОСОБ СИНХРОНИЗАЦИИ ВОЗБУЖДЕННОЙ СИНХРОННОЙ МАШИНЫ
(57)Изобретение относится к электротехнике. Цель изобретения - уменьшение расхода энергоносителя путем ускорения процесса синхронизации и уменьшения воздействий на синхронную машину и электрическую систему. Кроме контроля действительных значений угла, скольжения и ускорения, по которым определяют время воздействия на изменение впуска энергоносителя, дополнительно измеряют скорость перемещения и положение органа, изменяющего расход энергоносителя двигателя синхронной машины. Сигнал на изменение расхода энергоносителя двигателя синхронной машины формируют в зависимости от разности скорости перемещения органа, изменяющего расход энергоносителя двигателя синхронной машины, и величины, пропорциональной частному от деления произведения действительных значений скольжения и ускорения на, произведение разности между заданным к действительным значениями угла и функций от положения органа, изменяющего расход энергоносителя , I ил.
i
СЛ
Изобретение относится к электротехнике. Цель изобретения - уменьшение расхода энергоносителя путем ускорения процесса синхронизации и уменьшения воздействий на синхронную машину и электрическую систему. Кроме контроля действительных значений угла, скольжения и ускорения, по которым определяют время воздействия на изменение впуска энергоносителя, дополнительно измеряют скорость перемещения и положение органа, изменяющего расход энергоносителя двигателя синхронной машины. Сигнал на изменение расхода энергоносителя двигателя синхронной машины формируют в зависимости от разности скорости перемещения органа, изменяющего расход энергоносителя двигателя синхронной машины, и величины, пропорциональной частному от деления произведения действующих значений скольжения и ускорения на произведение разности между заданным и действительным значениями угла и функций от положения органа, изменяющего расход энергоносителя. 1 ил.
Изобретение относится к электротехнике и может быть использовано при синхронизации синхронных машин.
Целью изобретения является умень-. шение расхода энергоносителя путем ускорения процесса синхронизации,приближения его к оптимальномУ} к уменьшение воздействий на синхроннуто машину и электрическую систему.
На чертеже представлена структур- ная схема устройства, реализующего предлагаемый способ.
Сущность предлагаемого способа за- ключа ется в следующем,
За счет изменения расхода энергоносителя двигателя происходит изменение избыточного момента на валу синхронной машины и, следовательно, изменение ее ускорения вращения относительно электрической системы.
Это движение описывается равенствами:
СЛ
00
о
00
к/ dt;
S
+ J()dt;
(1) (2)
( 2нп -oQ +Sot +d/c +jrf ()dtJ dt
HI
(3)
где t , - текущее и начальное ускорения синхронной машины}
315J
s,, текущее и начальное скольжения синхронной машины; Г,2,т-с/ - текущий и начальный углы
между ЭДС синхронной ма- шины и напряжением электрической системы; п - целое чиспо (1,2,3), определяющее начальное значение угла и связанное с периодизацией угла; р - текущее значение скорости- изменения ускорения синхронной машиныо
Ускорение синхронной машины за- висит от положения m органа, изменяющего расход энергоносителя:
о( f (и)(4)
Полагая в переходном управляемом процессе постоянным среднее значение скорости изменения ускорения, получим
л dti df(m) dm , . /
.5Ш dt -
cp
const
(5)
Приведем равенства (I),(2) и (3) к следутощему виду:
о , о(р + f (m) mcpt;
(6) 30
s
/
0 +0/0 t+f (m) mcp 2 ;
(7)
.2 n-j;H-Sot+p o 1 -t-f 4m)mcpi (8)
35
Оптимальными условиями с позиций воздействия на синхронную машину и электрическую систему при синхронизации являются
и о, 0.(9) . 40
Решая совместно (6), (7), (8) и (9), получим расчетное значение
dm
dt 3(,)Чт)
(10)
где
заданное начальное значение угла;
f (п) - функция от положения органа, изменяюр1его расход энергоносителя, пропорциональная производ- ной от момента на валу синхронной машины по положению этого органа.
Способ реализуют следующим образом
Согласно способу контролируют угол, скольжение и ускорение вращения синхронной машины относительно электрической системы. Контролирзтот
также положение и скорость перемещения органа, изменяющего расход энер- гоносителяо
Определяют.момент времени вьтол- нения условия
s (11)
где А - коэффициент пропорциональности, выбираемьш заранее по условию оптимальности переходного процесса.
В этот момент времени начинают управление органом,- изменяющим расход энергоносителя, в зависимости от разности действительной тп скорости перемещения этого органа и ее расчетного значения, полученного из (10), которое пропорционально частному от деления произведения действительных значений скольжения и ускорения на произведение разности.между заданным и действительным значениями угла и функции от положения органа, изменяющего расход энергоносителя.
Воздействие на перемещение органа
F m
- :mcp
(12)
Указанное управление осуществляют до момента времени уменьшения ускорения до значения, близкого к нулевому J. 0. (13)
Значение заданного угла 2 угп в СЮ) выбирают заранее аналогично коэффициенту пропорциональности А в (II) из условий оптимальности переходного . процесса, при которЪм скорость изменения расхода близка к максимальной, с учетом одновременного достижения всех условий (9).
-Равенства (10)/ (П) и (J2) обусловливают одновременное выполнение условий (9), а выбор заданного угла и коэффициента пропорциональности А обеспечивает минимальную продолжительность процесса.
В случае пропорциональности момента на валу синхронной машины положению органа, изменяющего расход энергоносителя, функция (т)В.и равенство (10) упрощается, а также упрощается реализация способа.
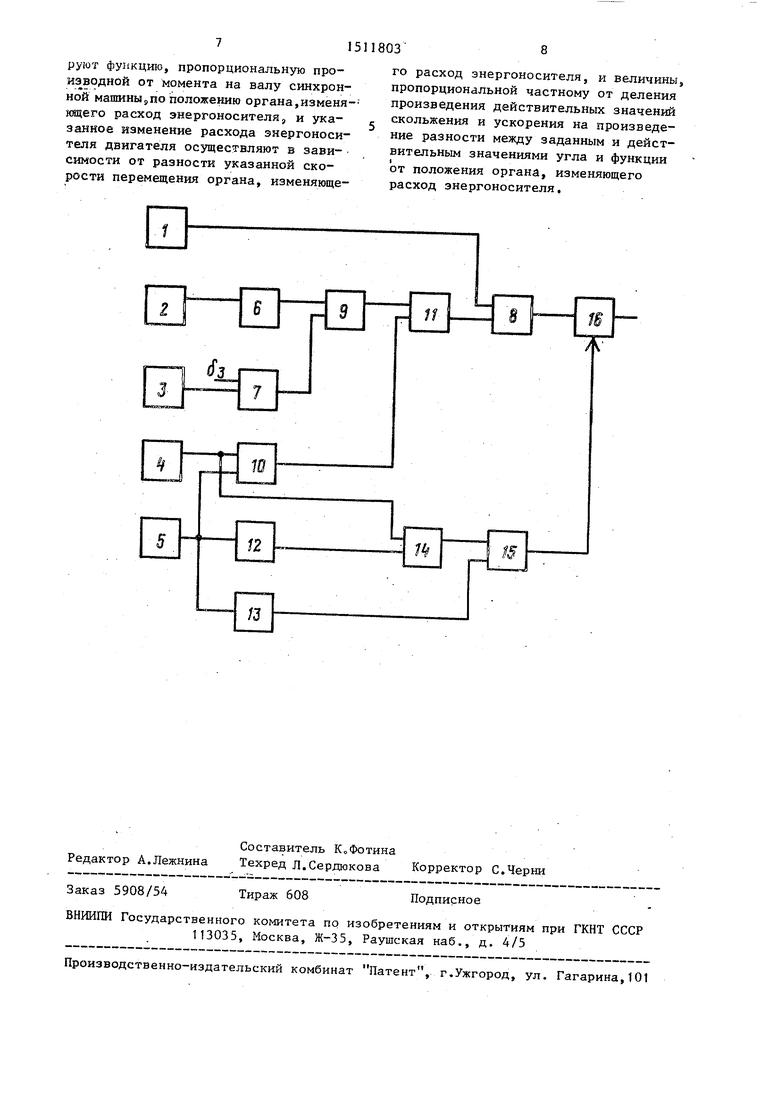
На чертеже представлена структур- ная схема устройства для реализации предлагаемого способа.
Устройство содержит датчик 1 скорости перемещения и датчик 2 положения органа, изменяющего расход энер-,
гоносителя, датчик 3 угла, датчика 4 скольжения и датчик 5 ускорения от- носительиого движения синхронной машины, функциональный преобразова.тель 6, реализующий функцию f (m), сумматоры 7 и 8, элементы 9 и 10 перемножения, элемент П деления, элемент 12 возведения во вторую степень компараторы 13 и 14, триггер 15 и аналоговый ключ 16.
Датчик 2 положения органа, изменяющего расход энергоносителя, соединен с входом функционального преобразователя 6,. выходом соединенного с одним входом элемента 9 перемножения, второй вход которого соединен с выходом сумматора 7, одним входом соединенного с выходом датчика 3 угла, а на второй .его вход подан сигнал, пропорциональный заданному значению угла 25Гп, Выход элемента 9 перемножения соединен с входом делителя элемента 11 деления, выходом соединенного с первым входом сумматора 8, второй вход которого соединен с датчиком 1 скорости перемещения органа, изменяющего расход энергоносителя, а выход - с входом аналогового ключа 16. Вход делимого элемен-. та 11 деления соединен с выходом элемента 10 перемножения, входы ко- . торого соединены с датчиком 4 скольжения и датчиком 5 ускорения, выход которого также соединен с компаратором 13 и через элемент 12 возве- Дания, во вторую степень с входом компаратора 14, второй вход которого соединен с датчиком 4 скольжения. Выходы компараторов 14 и 13 соединены с. входами триггера 15, действующего соответственно на открытие и закрытие аналогового ключа 16, сиг- нал с выхода которого подается в устройство управления органом, изменяющим расход энергоносителя.
Устройство работает следующш.} об-. разом.
Синхронная машина при наличии избыточного момента на ее валу, например, при пуске, имеет ускорение вращения. Контролируя с помощью датчиков 4 и 5 скольжение и ускорение ; синхронной мащины, компаратором 14 определяется выполнение условия (11) и подается сигнал на вход триггера 15, устанавливающий его в положение, включающее аналоговый ключ 16„
11803
На выходе сумматора 8 формируется сигнал, пропорциональный разности между действительным значением ско- J рости перемещения органа, нзменякяце- го расход энергоносителя, и ее расчетным значением в соответствии с (10). Этот сигнал подается на вход устройства управления положением ор10 гана, изменя}ощего расход энергоносителя , что приводит к изменению этого расхода, момента на валу синхронной мащины и, следовательно ускорения, скольжения и угла. Указанные измене15 ния вызывают изменение расчетного
значения скорости перемещения органа, изменяющего расход энергоносителя, и уменьщение разности, а также воздействия по (12)о При нулевом среднем
20 значении в период переходного процесса этой разности создаются .оптимальные условия (9) для включения синхронной мащины в электрическую систему. Окончание процесса управления
25 расходом энергоносителя фиксируется компаратором 13, врзвращающим в исходное состояние триггер 15 и отключающим аналоговый ключ 16, после чего управление расходом энергоносите-
30 ля осуществляется традиционным методом по отклонению частоты вращения синхронной машины от заданного значения.
35
Формула изобретения
Способ синхронизации возбужденной синхронной мащины путем контроля действительных значений угла, скольжения, ускорения вращения синхронной мащины относительно электрической системы и изменения расхода энергоно- си те ля двигателя, нач1шая с момента
времени вьшолнения условия равенства скольжения величине, пропорциональной квадрату ускорения вращения синхронной машины относительно электрической скстемь, до момента времени
уменьщения ускорешгя до значения,
близкого к нулевому, отличаю-, щ и и с я тем, что, с целью умень- . шения расхода энергоносителя путем
ускорения процесса синхронизации и уменьшения воздействий на синхронную
мащину и электрическую систему, до- полнительно контролируют положение
и скорость перемещения органа, изменяющего расход энергоносителя, форми-
руют функцию, пропорциональную производной от момента на валу синхронной машиныJпо положению органа,изменяющего расход энергоносителя, и указанное изменение расхода энергоносителя двигателя осуществляют в зависимости от разности указанной скорости перемещения органа, изменяющеСоставитель КоФотина Редактор А.Лежнина Техред Л.Сердюкова Корректор С.Черни
Заказ 5908/54
Тираж 608
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г.Ужгород, ул. Гагарина,101
го расход энергоносителя, и величины, пропорциональной частному от деления произведения действительных значений скольжения и ускорения на произведение разности между заданным и действительным значениями угла и функции от положения органа, изменяющего расход энергоносителя.
Подписное
