Изобретение относится к способам обработки земли и экологически безопасным машинам для земляных, очистных, дорожных работ, может быть использовано в металлургии при прокате стали, в машиностроении, земледелии в качестве высоких технологий и техники, нового принципа механизации и роботизации всех /и горной/ зон без сложных тракторов, склоноходов и мостов.
Известен способ обработки земли тракторами, и оборотными рабочими органами для ровной вспашки, и реверсивными рабочими органами, и приводом для их перемещения относительно энергетического модуля /пат. 2170497, А 01 В 9/00 от 03.09.96 г./.
Недостатками известного объекта являются сложность и высокая стоимость ходовой части, опасность, низкие эксплутационные качества и ущербность для производства /экономики/, экологии и общества во всех /и горной/ зонах земледелия.
Цель изобретения - устранение недостатков.
Основной и новым путем является замещение функций тракторов и склоноходов, применение малонапряженных технологий производства техники и продукции земледелия - нового принципа энерго-, материало-, время-, ресурсосбережения - концепции повышения уровня механизации и роботизации всех /и горной/ зон.
Поставленная цель достигается тем, что землю обрабатывают малонапряженно до желаемого состояния, поддерживая целевое положение машины без сложных тракторов и склоноходов, более широко совмещая функции колес и рабочих органов, или преобразуя колесо в рабочий орган, или/и в средство поворота нулевым радиусом, и поперечного хода, улучшают эксплуатационные качества.
Уплотнение почвы колесом до вспашки преобразуют в дообработку ее после вспашки, колесо используют в качестве заплужного реверсивного катка для крошения комков, укатки, сохранения влаги для продуцирования биомассы, регулирования глубины вспашки и нагрузки двигателя. Землю обрабатывают до желаемого состояния путем воздействия в выборочной очередности дисков, ромбиков, зубьев, предплужников, плугов, заплужников, крыльев в малонапряженном состоянии.
Землю обрабатывают до желаемого состояния, снижая уплотнение и резание, шаг и угол установки рабочих органов, повышая изгиб и разрыв тонкого пласта, снижают напряжения и энергозатраты.
Колесо переводят в режим рабочего органа или/и рабочий орган переводят в режим опоры и средства передвижения в заданном направлении, или/и средство управления нагрузкой-глубиной обработки земли до выглубления рабочего органа при встрече с камнем, противодействие колес и рабочих органов преобразуют в их содействие достижению желаемого состояния почвы и формированию нагрузки и траектории в режиме полуробота применительно к внешним условиям. Сочетая и преобразуя опорные, силовые, управляющие, регулирующие, приводные и технологические режимы и функции колеса и сопутствующие технологические, тягово-динамические, защитно-регулирующие, опорно-управляющие, эколого-экономические режимы и/или функции рабочих органов, расширяют диапазон функций в малоэнергозатратном режиме. Функции ходовой системы и рабочих органов расширяют и сочетают с возможностью работы на склонах, в зоне наводнения, защиты человека, техники и среды. Вспашку сочетают с крошением комков, уравновешивают силы заглубления и выглубления и суммируют действия и их повторения. Землю обрабатывают самоповоротными остроугольными реверсивными зубьями при малой напряженности взлома и изгиба, прочесывая убирают камни, стоят грядки, дороги, террасы и другие сооружения.
Мощность двигателя делят между колесами и рабочими органами с возможностью переключения и поочередной работы, изменения числа и схемы соединения потребителей для регулирования скорости движения. Машину поворачивают нулевым радиусом движущей силой даже одного колеса без дифференциала, сложных механизмов поворота трансмиссии. Борозду используют в качестве террасы или дорожки, канала на поливном поле, базовой линии для движения, при этом камни и технологический сдвиг почвы используют для их строительства. Состояние поверхности изменяют, регулируя скорость движения, при снижении скорости углубляют обработку, при повышении скорости выглубляют и формируют борозды, каналы, террасы, дороги и др. сооружения. Почву обрабатывают в режиме саморегулирования угла установки рабочего органа и нагрузки двигателя.
Агромашина содержит секции взаимодействующих рабочих органов резания и качения для малонапряженной обработки земли до желаемого состояния за один проход или выборочные рабочие органы резания и качения на конце механической руки привода. Привод рабочих органов выполнен в виде складывающихся "рук"-рычагов - носителей рабочего оборудования и колес в режимах самоустановки, ведущего, ведомого нейтрального, продольного и поперечного хода рабочих органов.
Плуг содержит выборочные рабочие органы в виде катков, дисков, зубьев, граблин, лопат, ромбиков и крылья для обработки почвы с возможностью уравновешивания без полевых досок. Агромашина содержит рабочий орган в виде сегмента на оси самоповорота и рабочие органы на двух осях самоустановки. Оборотный рабочий орган содержит крылья на рабочей поверхности или на тыльной стороне, или диск на кривошипе для перестановки вправо и влево. Агромашина содержит рабочие органы - заменители ходовой части и колеса - заменители рабочих органов, фиксаторы режимов. Агромашина содержит агрегаты из авиационного утиля для использования послеполетного ресурса на земле в виде двигателя, колес, гидроагрегатов. Приводы колес и рабочих органов соединены с возможностью переключения энергии и изменения схемы соединения и числа потребителей при регулировании скорости движения. Агромашина содержит регулятор активности колес - колесной формулы от 3×3 до 3×1 в тяговом режиме до 3к0 или 1К0 при обработке земли с возможностью изменения схемы соединения для расширения диапазонов скоростей и сил. Гидромашина для привода колес и рабочих органов содержит утопители поршней-замыкателей рабочих полостей. Гидромашина содержит рабочие полости симметричного нагружения ротора с двух сторон, в одном варианте ротор установлен на эксцентриках для регулирования расхода без мертвых зон и распределителей.
Агромашина содержит рабочие органы и привод из проката высокой готовности деталей с возможностью повышения уровня самообработкой, ресурсо-, энергосберегаемости. Рабочие органы имеют упругие ограничители.
Рабочие органы резания передают силы тяжести и заглубления рабочим органам качения. Поэтому рабочие органы установлены с возможностью взаимодействия, перестановки по высоте - адаптации к глубине. Маятниковые и дисковые крылья плуга установлены с возможностью самоперестановки вокруг горизонтальной оси сопротивлением почвы. Рабочие органы собраны в секцию с возможностью изменения шага /ширины пласта/ и/или высоты /глубины/ для настройки на малоэнергозатратную, малонапряженную обработку, изменения числа и очередности установки с учетом цели обработки земли.
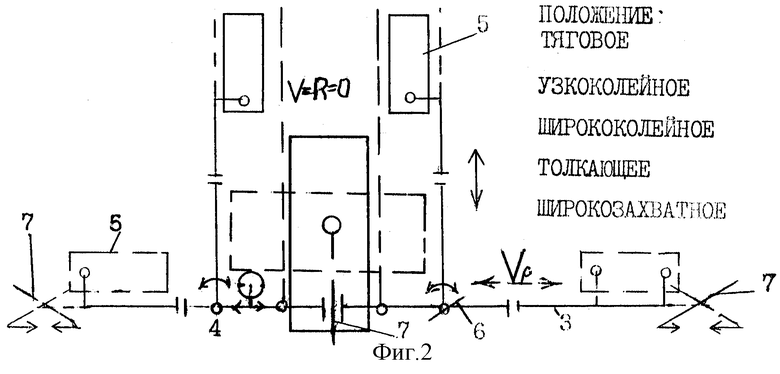
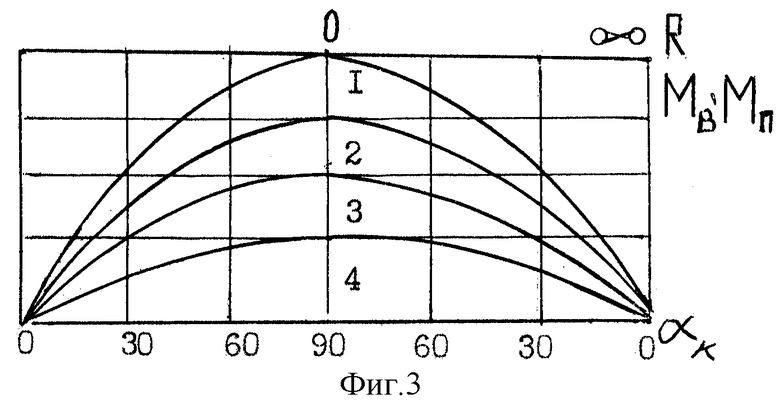
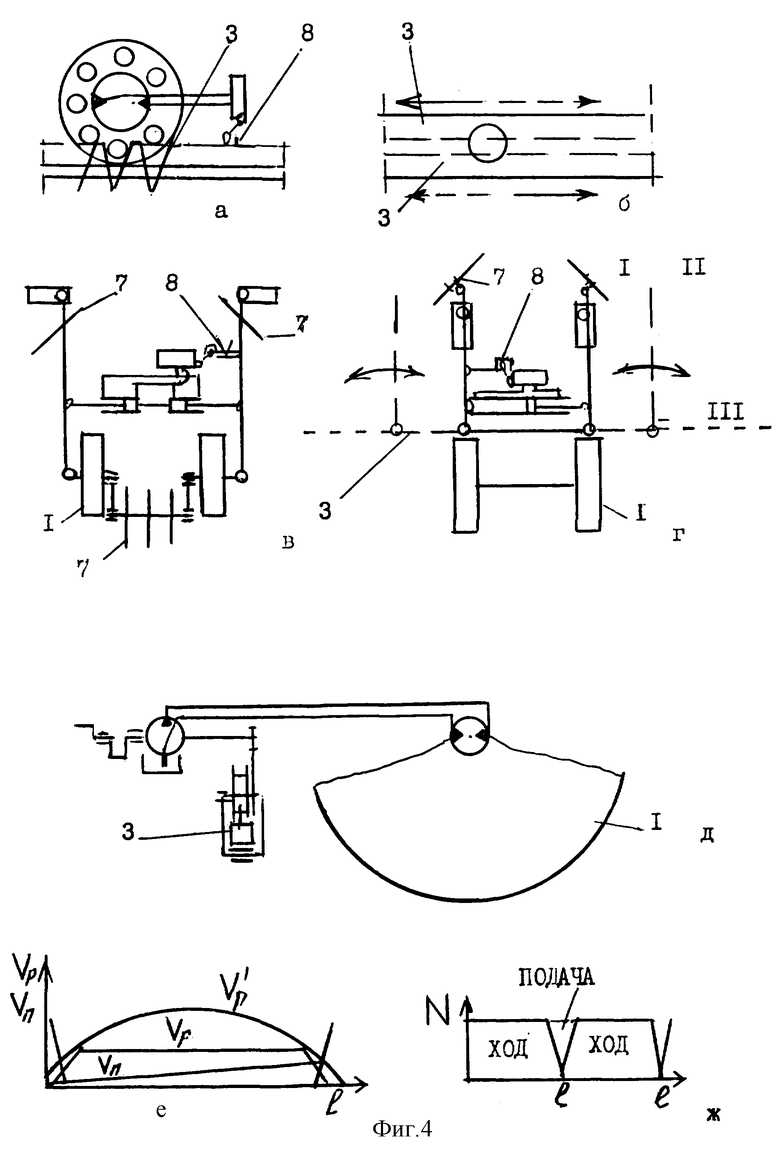
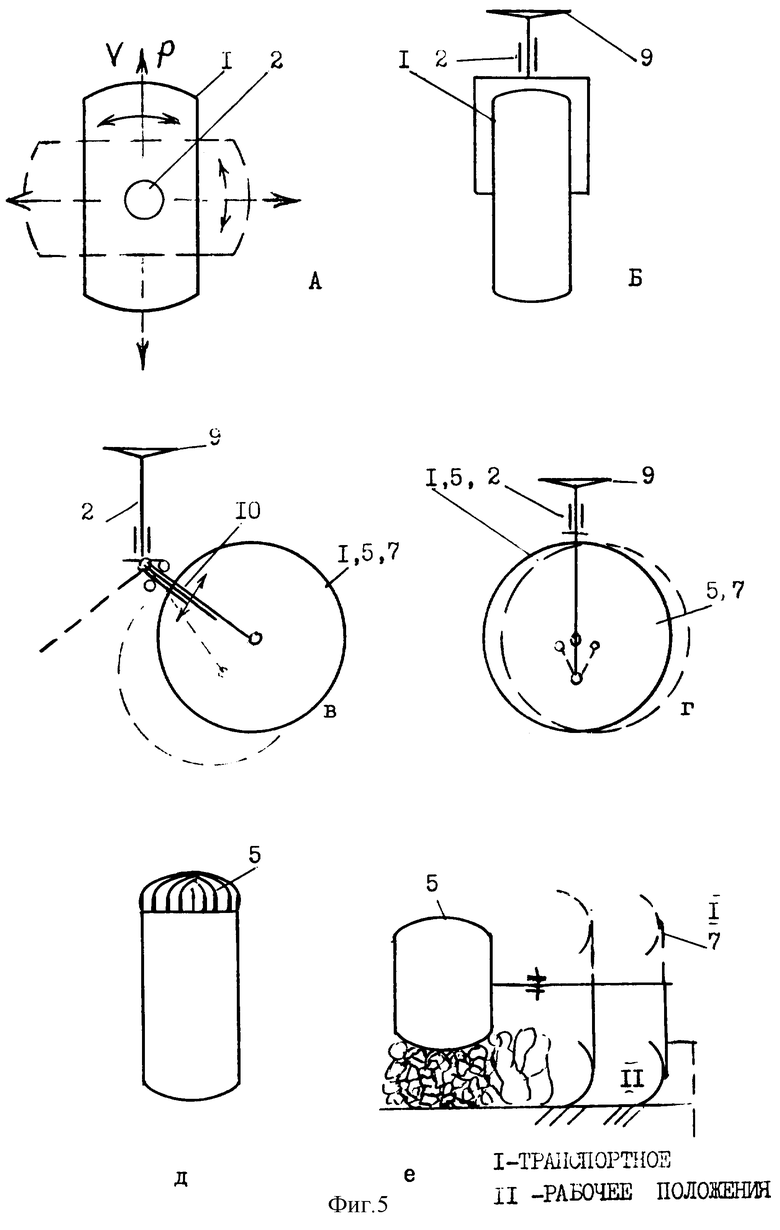
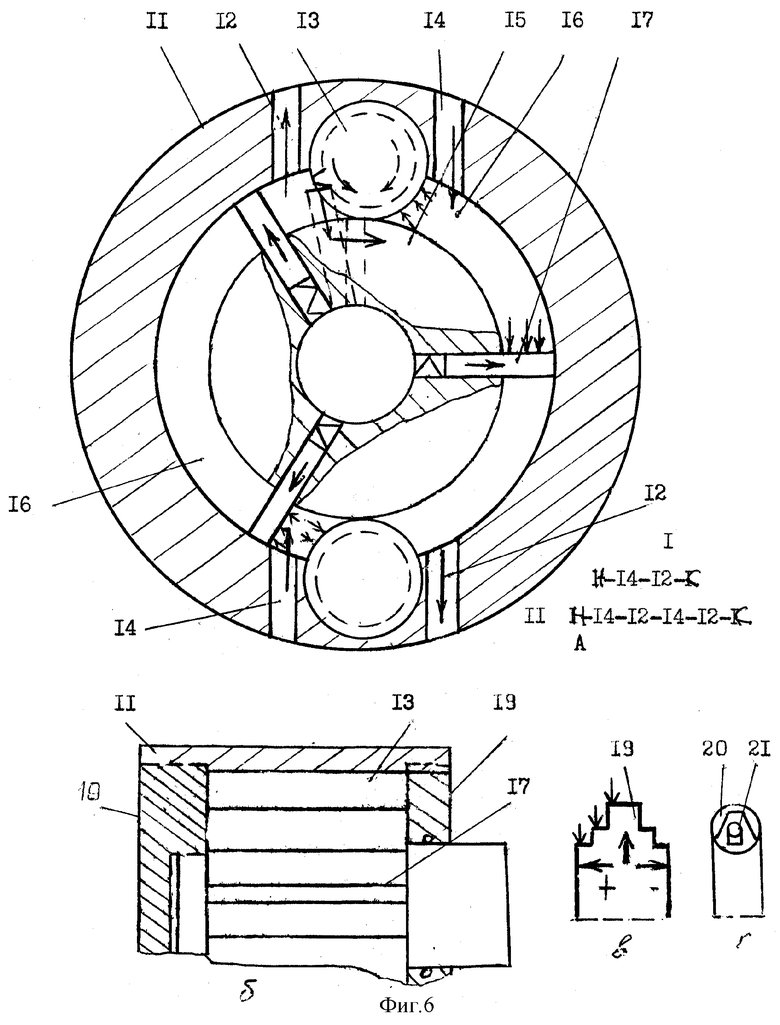
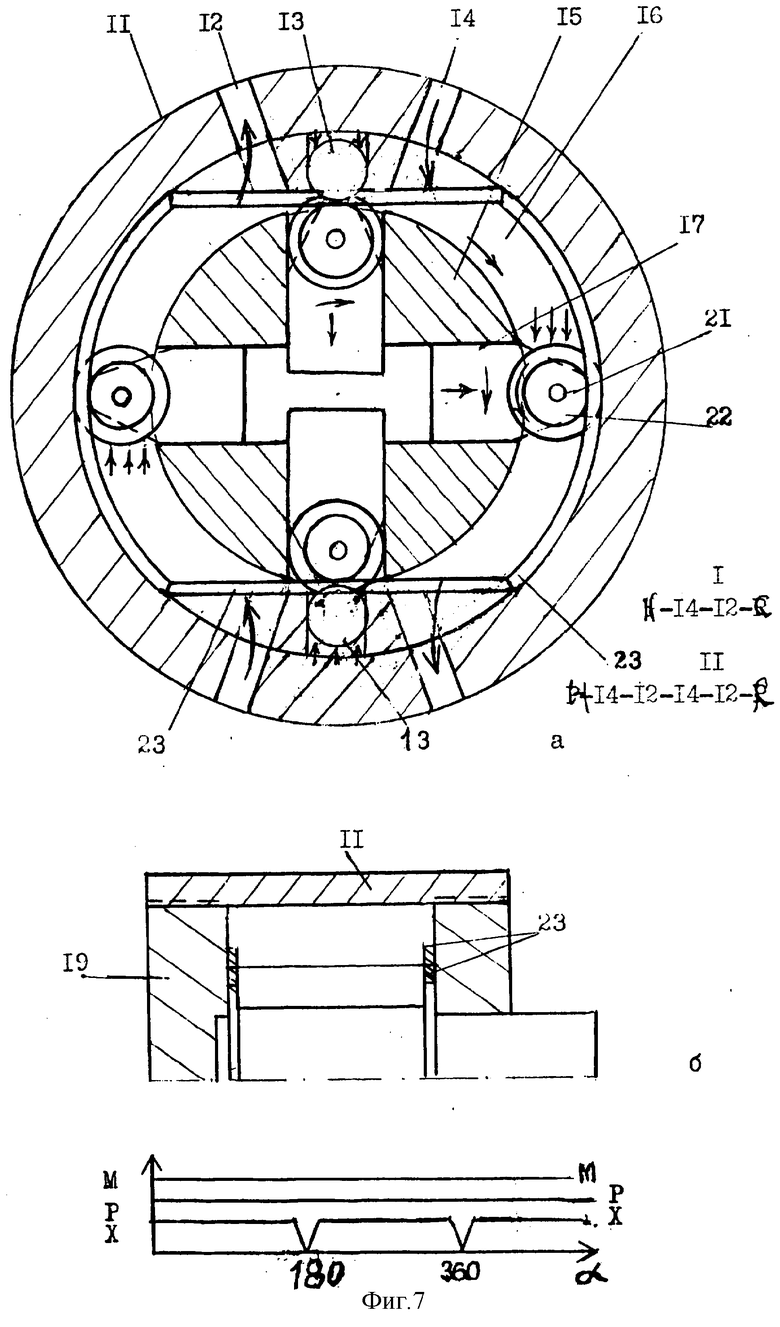
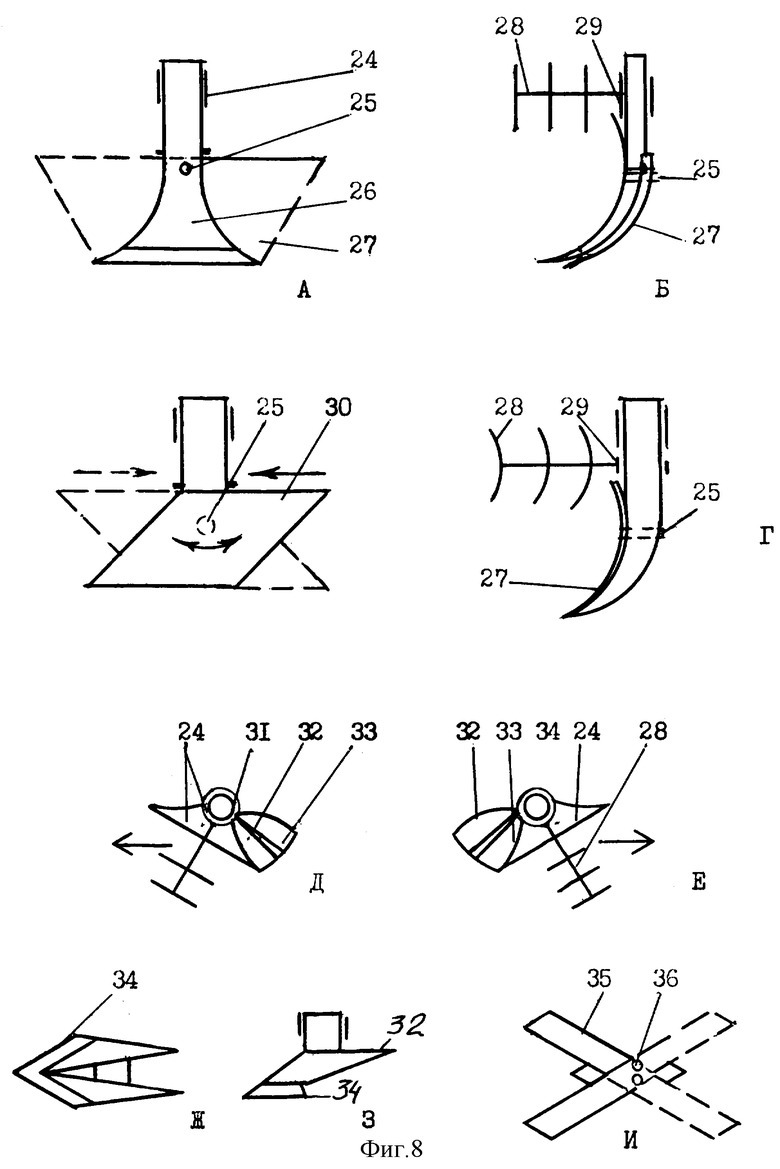
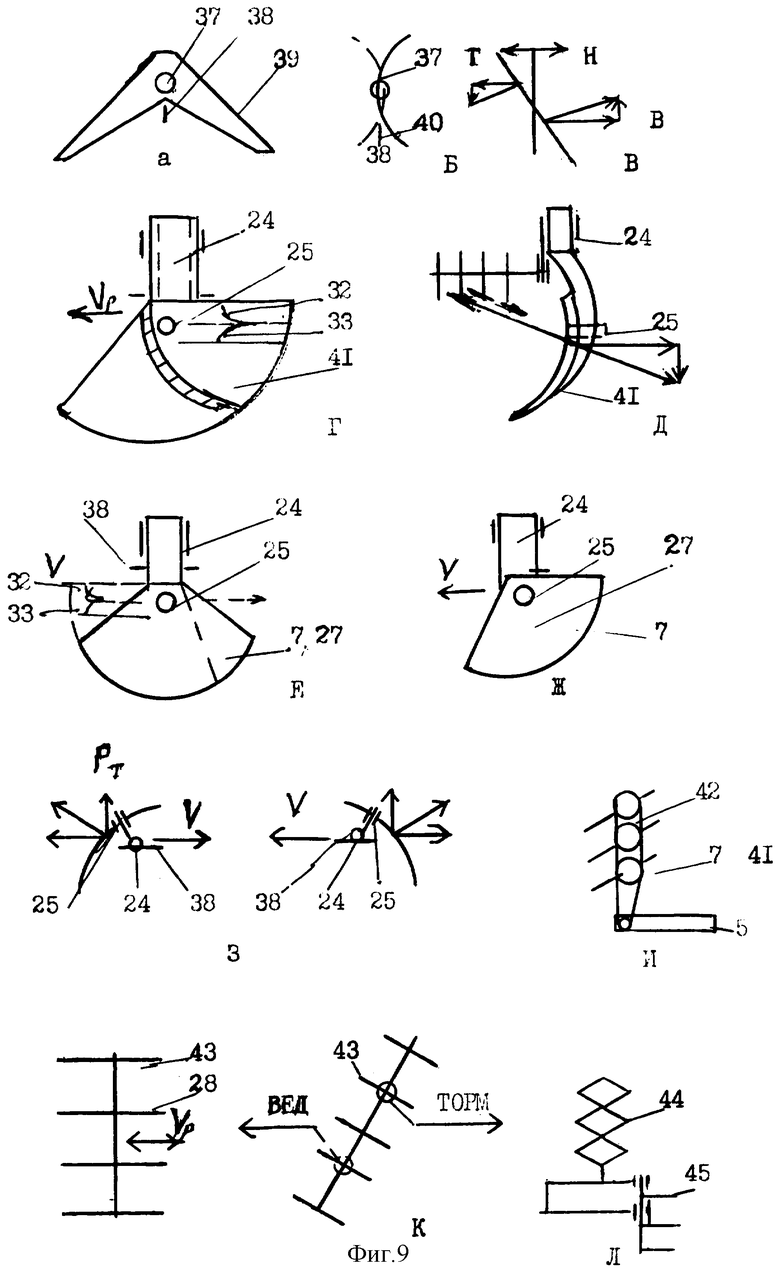
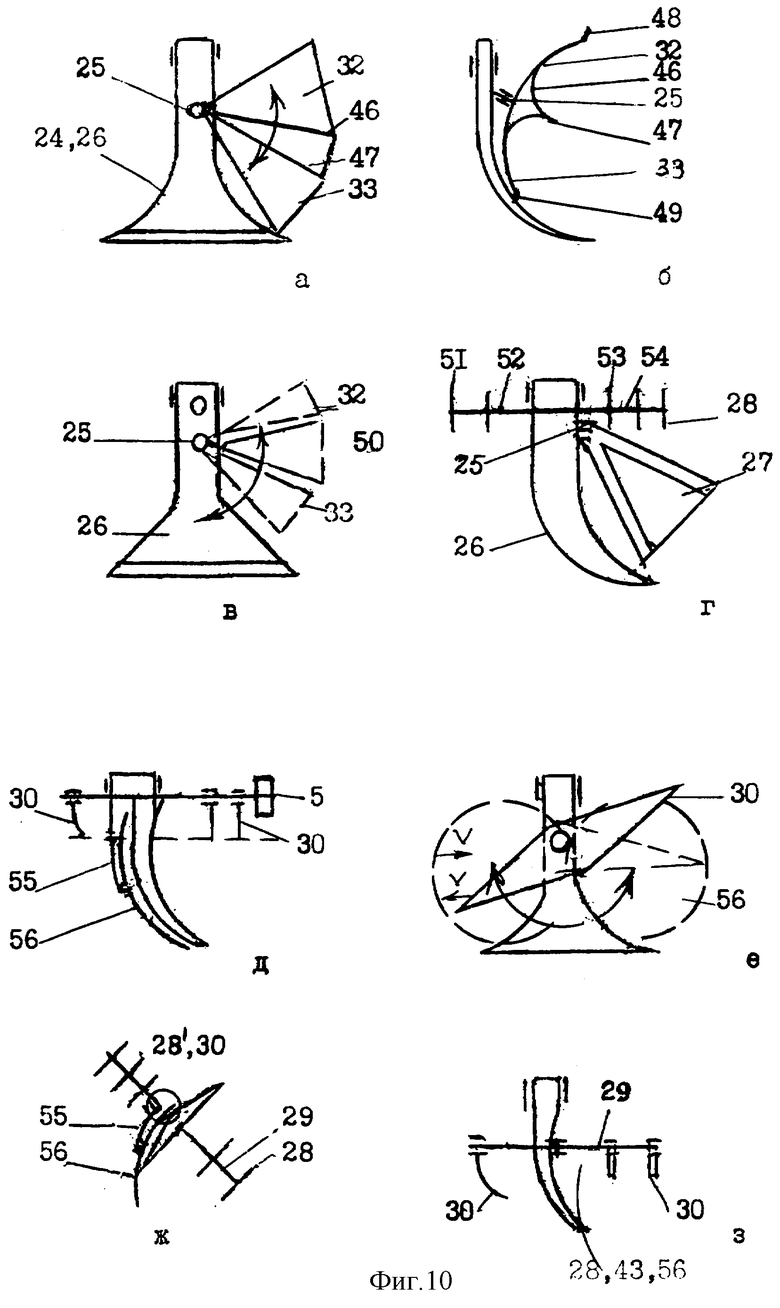
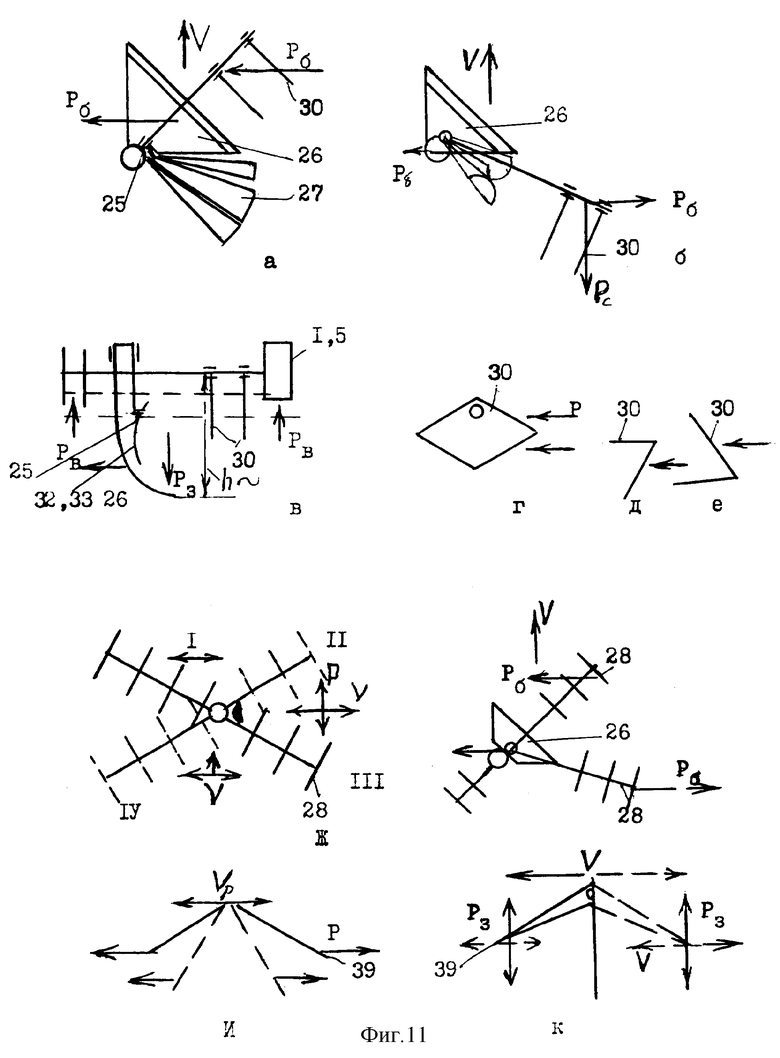
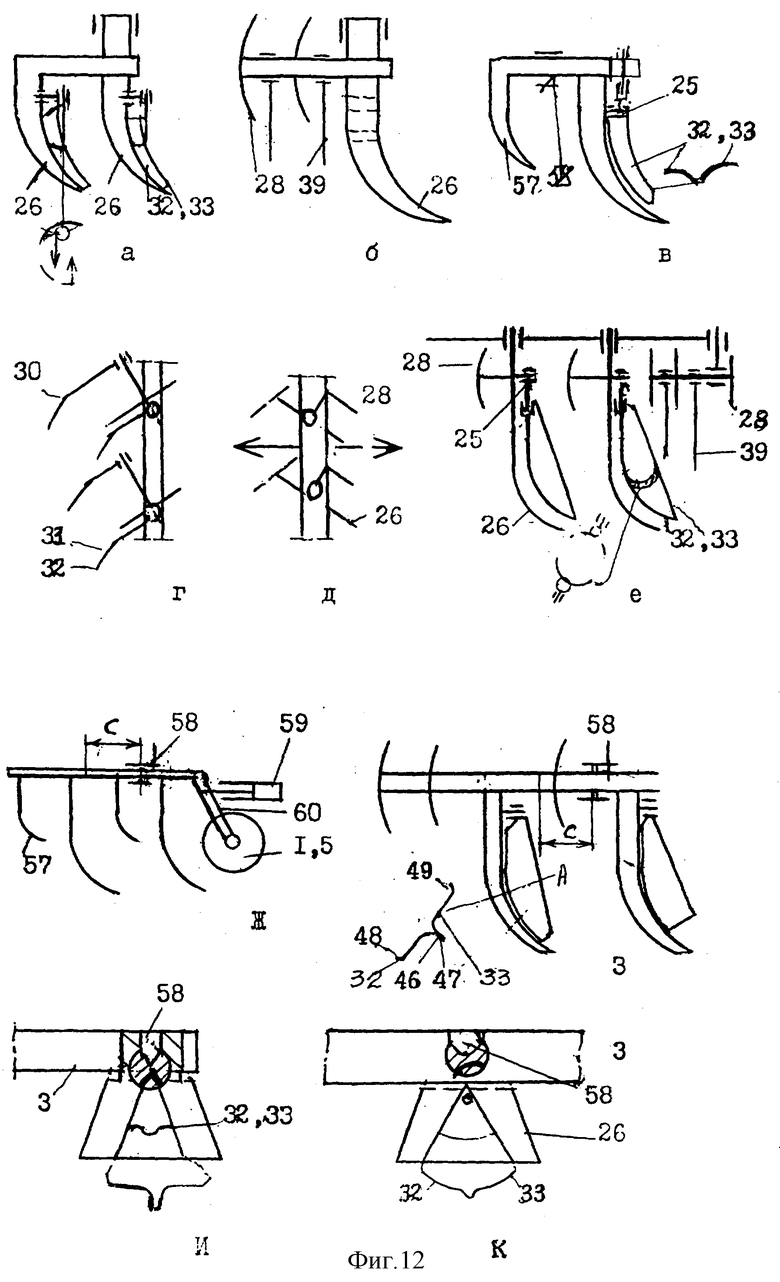
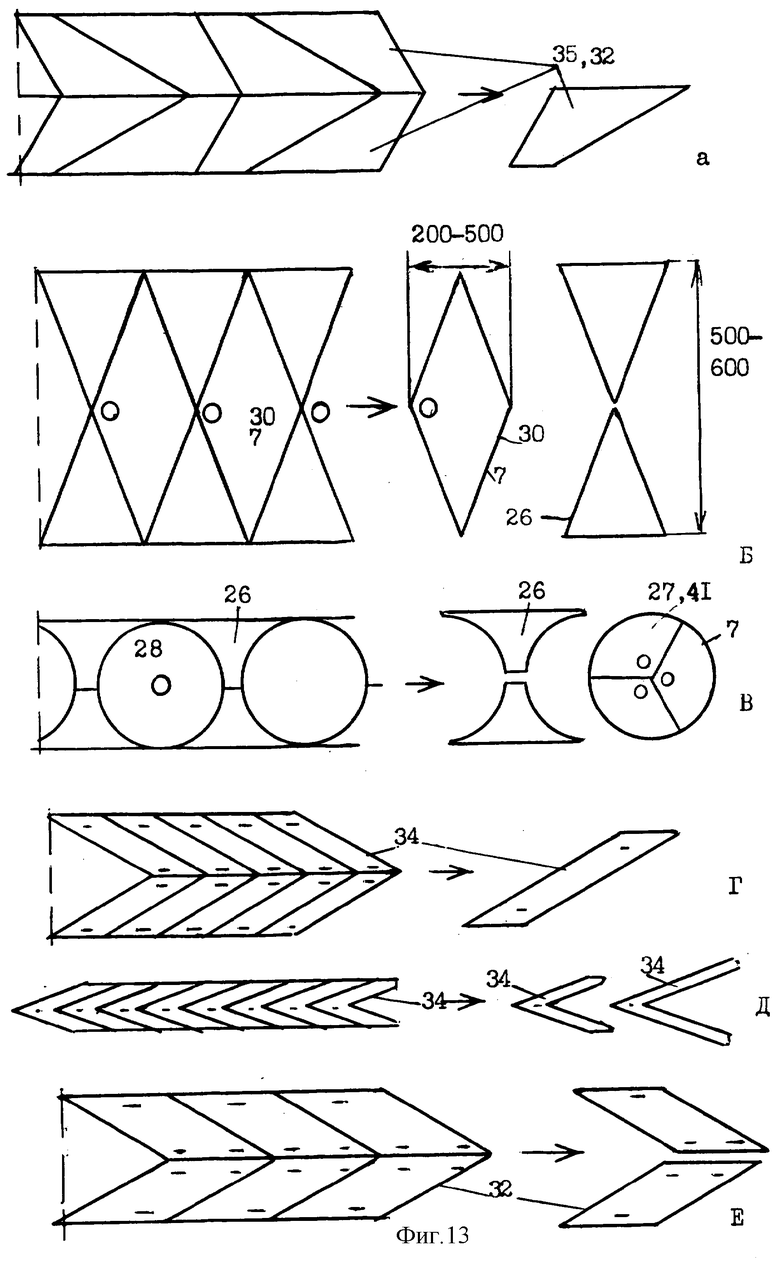
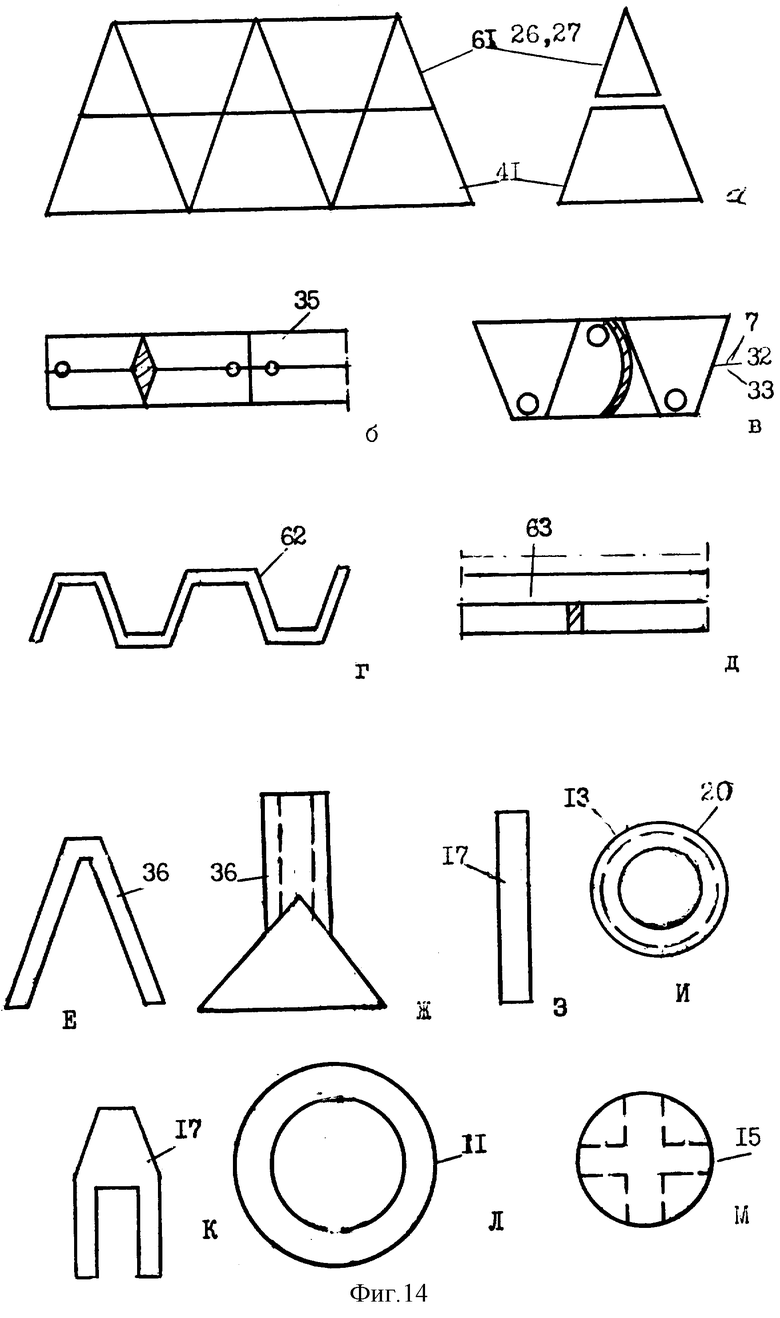
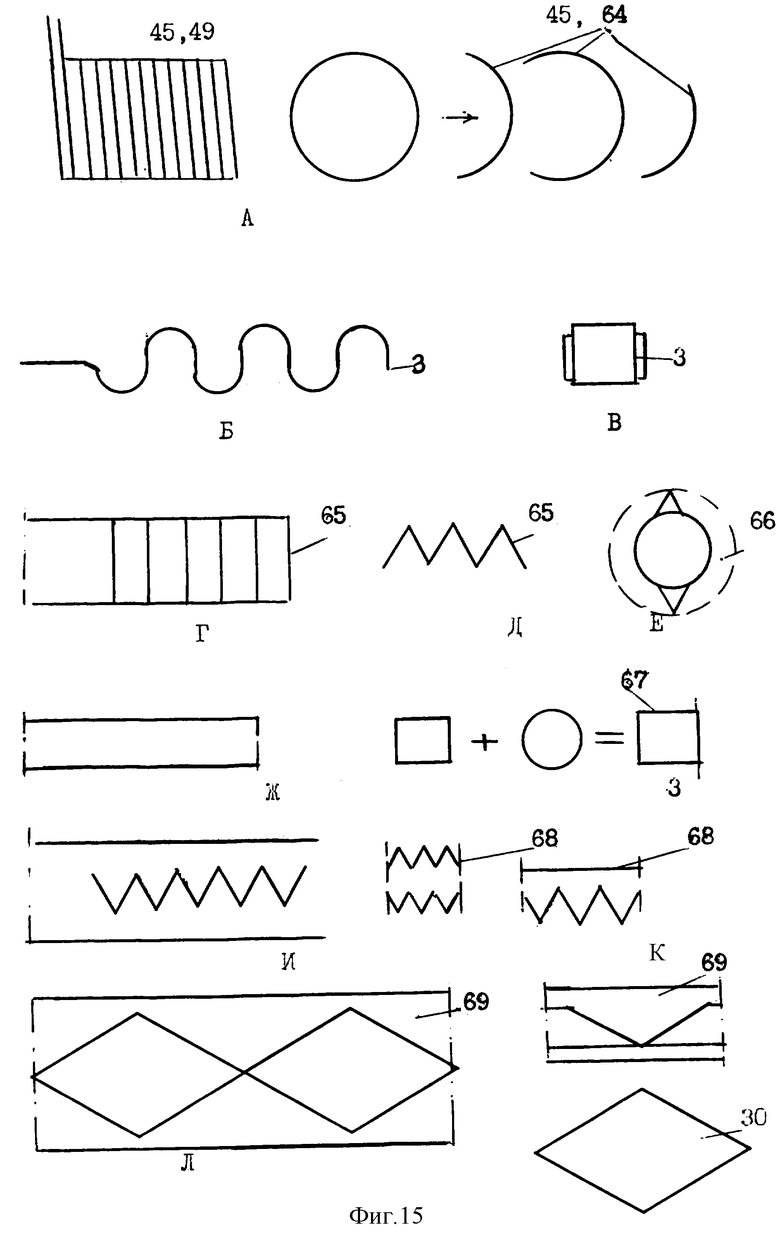
На фиг.1 изображена схема агромашины, на фиг.2 - схема положений, на фиг.3 - график изменения ведущего Мв, поворачивающего Мп моментов по радиусу R и углу α поворота колеса, на фиг. 4а - схема цевочного привода рейки, на фиг. 4б - схема привода двух реек, на фиг.4в - схема рычажного привода с дисками-опорами, на фиг.4г - схема трех вариантов ширины I, II, III, на фиг.4д - схема привода колеса и отбора мощности, на фиг.4е - схема изменения скоростей работы рычагами Ур, рейкой Ур, подачи У, повторения Уп в зависимости от хода Р, на фиг.4ж - схема потоков мощности хода и подачи N, на фиг.5а - схема крутоповоротного колеса, вид сверху, на фиг.5б - схема управления диска и колеса, на фиг.5в - схема колеса и диска с регулятором высоты, на фиг.5г - схема колеса и диска-датчика, на фиг.5д - схема колеса из шин-утиля, на фиг.5е - схема колеса - рабочего органа, на фиг.6а - схема высокомоментного гидромотора, на фиг.6б - схема выреза сбоку, на фиг.6в - схема шибера, на фиг.6г - схема шибера с роликом, на фиг.7а - варианта гидромотора с роликами или шестернями - шиберами копирования статора гладкого или зубчатого, на фиг.7б - схема сечения по ролику, на фиг.7в - график показателей: момента М, давления Р, хода шибера Х в зависимости от угла поворота ротора α, на фиг.8а - схема плуга с подвесным крылом, на фиг.8б - то же с лущильником, бороной, вид сбоку, на фиг.8в - схема подвесного ромбовидного плуга, рыхлителя, лущильника, бороны, на фиг.8г - то же с дисками для дообработки, на фиг.8д - схема плуга с крыльями, на фиг.8е - то же при обратном ходе, на фиг.8ж - схема плуга с двумя отвалами реверсивного хода, на фиг.8з - то же, вид сбоку, на фиг.8и - схема самоустановки лап культиватора и плоскореза, на фиг.9а - схема почворазрывного реверсивного рыхлителя, на фиг.9б - схема реверсивной бульдозерной лопаты, грейдера, планировщика, на фиг.9в - схема сил в тормозном Т, нейтральном Н и ведущем В режимах, на фиг.9г - схема плуга из секторов диска, на фиг.9д - схема этого же рабочего органа для выполнения различных работ со схемой передачи сил резания рабочему органу качения, на фиг.9е - схема подвешенного поворотного на двух осях рабочего органа, на фиг.9ж - его схема при работе, на фиг.9з - схема работы и действия сил при ходе вправо и влево, на фиг.9и - схема ножа уборочной машины с приводом от колеса или рабочих органов для обработки земли с передачей от колеса поворота передаточным числом около 3, на фиг.9к - схемы настройки режимов и функций дисковых рабочих органов, на фиг.9л - схема ножа и граблин уборочной машины, на фиг.10а - схема плуга с поворотным отвалом - крылом на груди, на фиг.10б - то же, вид сбоку, на фиг.10в - то же с маятниковым отвалом - крылом из трех роликов, вид спереди. На фиг.10г - то же с дополнительными рабочими органами /дисками/ с двух сторон, вид сбоку, на фиг.10д - схема плуга с дисковым отвалом, заплужником, роликами и катком для дообработки, вид сбоку; на фиг.10е - то же, вид спереди с изображением диска в двух рабочих положениях для оборота пласта вправо и влево, на фиг.10ж - схема плуга с дисковым маятниковым отвалом и дисками для обработки почвы до и после вспашки, вид сверху, на фиг.10з - схема плуга с предплужниками и заплужниками зубьями ромбами, вид сбоку, на фиг.11 - схемы вариантов исполнения и действия сил заглубления секции и выглубления, на фиг.11а - схема секции плуга из трапеции и ромбов рыхлителей в ведущем режиме с избытком движущих сил Р3 и оборотом пласта, на фиг.11б - схема секции ведущего плуга и ромбиков торможения для уравновешивания сил и дистанционной работы с сохранением стерни /противоэрозионная настройка/, на фиг.11в - схема уравновешивания секции силами заглубления РЗ и выглубления РВ ромбиками и катком, на фиг.11г - схема ромбика-почвоклина, на фиг.1д - схема носка ромбика в выглубляющем режиме, на фиг.11е - схема носка в режиме заглубления, на фиг.11ж - схема секции уравновешенных дисковых рабочих органов в реверсивном собирающем, разгибающем режимах дистанционной работы в сочетании I, IV, II, III, остроклиновых и I, III - II, IV ведущих режимах, на фиг.11з - схема плуга с дисками в ведущей I и тормозном II режимах уравновешивания боковых /движущих/ сил, на фиг.11и - схема изменения угла самоустановки зуба, на фиг.11к - схема действия самозаглубляющих Р3 и самовыглубляющих  сил при реверсивном ходе остроклинового прямозубового рабочего органа, на фиг.12а - схема секции плуга с отвалом на груди, на фиг.12б - схема комбинированного рабочего органа из дисков, ромбиков и плуга для обработки трех ярусов, на фиг.12в - схема плуга с заплужником, на фиг.12г - схема секции из секций самоповоротных рабочих органов-подсекций, на фиг.12д - схема секции из секций самоповоротных рабочих органов, на фиг.12е - схема секции из секций рабочих органов с дисками, зубьями и плугами, на фиг.12ж - схема секции рабочих органов с вибратором-подъемником вид сбоку, на фиг.12з - схема секции рабочих органов с дисками и плугами, сечение отвала в виде фигурной скобки и смещение /С/ бруса привода от центра сопротивления, на фиг.12и - схема связи бруса с рабочими органами с защитой от камня фиксатором, на фиг.12к - схема фиксатора соединения бруса с рабочими органами для каменистого поля. На схемах указаны сечения крыльев, оси и зуб самоперестановки вокруг двух осей, на фиг.13а - схема проката высокой готовности отвалов, на фиг.13б - схема проката и рабочих органов с чередующим носком и крылом и треугольников-крошителей почвы, на фиг.13в - схема проката дисков, крошителей и секторов, на фиг.13г - схема проката лемехов реверсивного хода и поворотного типа, на фиг.13д - схема проката лап, плоскорезов и лемехов двухотвальных плугов, на фиг.13е - схема проката симметричных отвалов, на фиг.14а - схема - полос-лап, конусов-роликов, на фиг.14б - схема проката полос с двумя лезвиями лап, ножей, на фиг.14в - схема проката крыльев, отвалов и подвесных рабочих органов, на фиг.14г - схема проката реек, стенок бункеров, на фиг.14д - схема боковин рейки, на фиг.14е - схема стоек рабочих органов, на фиг.14ж - схема корпусов рабочих органов, на фиг.14з - схема проката шиберов, на фиг.14и - схема проката роликов или/и шестерен, на фиг.14к - схема проката шиберов, на фиг.14л - схема проката статорной трубы гидромашин, на фиг.14м - схема проката пазов ротора гидромашины, на фиг.15а - схема граблин проката, на фиг.15б - схема проката волновой и гребневой рейки, на фиг.15в - то же, вид сбоку, на фиг.15г - схема проката для роликов, на фиг.15д - то же в сечении, на фиг.15е - схема ролика из прокатной полоски, на фиг.15ж - схема проката роликов, шкивов, цилиндров, на фиг.15з - схема цилиндра из проката, на фиг.15и - схема проката ножа/пилы, ножовки с одной и двух сторон зубьями, на фиг.15л - схема проката для стрелы, руки, рычаги с выходом и ромбических отвалов, ножей.
сил при реверсивном ходе остроклинового прямозубового рабочего органа, на фиг.12а - схема секции плуга с отвалом на груди, на фиг.12б - схема комбинированного рабочего органа из дисков, ромбиков и плуга для обработки трех ярусов, на фиг.12в - схема плуга с заплужником, на фиг.12г - схема секции из секций самоповоротных рабочих органов-подсекций, на фиг.12д - схема секции из секций самоповоротных рабочих органов, на фиг.12е - схема секции из секций рабочих органов с дисками, зубьями и плугами, на фиг.12ж - схема секции рабочих органов с вибратором-подъемником вид сбоку, на фиг.12з - схема секции рабочих органов с дисками и плугами, сечение отвала в виде фигурной скобки и смещение /С/ бруса привода от центра сопротивления, на фиг.12и - схема связи бруса с рабочими органами с защитой от камня фиксатором, на фиг.12к - схема фиксатора соединения бруса с рабочими органами для каменистого поля. На схемах указаны сечения крыльев, оси и зуб самоперестановки вокруг двух осей, на фиг.13а - схема проката высокой готовности отвалов, на фиг.13б - схема проката и рабочих органов с чередующим носком и крылом и треугольников-крошителей почвы, на фиг.13в - схема проката дисков, крошителей и секторов, на фиг.13г - схема проката лемехов реверсивного хода и поворотного типа, на фиг.13д - схема проката лап, плоскорезов и лемехов двухотвальных плугов, на фиг.13е - схема проката симметричных отвалов, на фиг.14а - схема - полос-лап, конусов-роликов, на фиг.14б - схема проката полос с двумя лезвиями лап, ножей, на фиг.14в - схема проката крыльев, отвалов и подвесных рабочих органов, на фиг.14г - схема проката реек, стенок бункеров, на фиг.14д - схема боковин рейки, на фиг.14е - схема стоек рабочих органов, на фиг.14ж - схема корпусов рабочих органов, на фиг.14з - схема проката шиберов, на фиг.14и - схема проката роликов или/и шестерен, на фиг.14к - схема проката шиберов, на фиг.14л - схема проката статорной трубы гидромашин, на фиг.14м - схема проката пазов ротора гидромашины, на фиг.15а - схема граблин проката, на фиг.15б - схема проката волновой и гребневой рейки, на фиг.15в - то же, вид сбоку, на фиг.15г - схема проката для роликов, на фиг.15д - то же в сечении, на фиг.15е - схема ролика из прокатной полоски, на фиг.15ж - схема проката роликов, шкивов, цилиндров, на фиг.15з - схема цилиндра из проката, на фиг.15и - схема проката ножа/пилы, ножовки с одной и двух сторон зубьями, на фиг.15л - схема проката для стрелы, руки, рычаги с выходом и ромбических отвалов, ножей.
Агромашина может реализовать много способов обработки земли и других материалов выборочными рабочими органами и секциями выборочных рабочих органов малонапряженным и энергосберегающим методом до достижения целевого состояния за один проход с возможностью изменения режимов. Дальнейшее расширение функций ходовых систем и рабочих органов создает условия для повышения уровня управления при работе в поле и готовности проката деталей.
Способ реализуют преобразованием функций колес и выборочных рабочих органов энергосберегающей, малонапряженной обработки земли, плугами резания и качения /с дисковыми рабочими органами/.
Агромашина /фиг.1-5/ содержит одно ведущее крутоповоротное колесо 1 (или 5) на оси 2, относительно которой перемещаются руки /рейки, штанги/ 3 с шарнирами 4 секций с колесами 5, фиксаторами 6 настройки движения и положения рабочих органов 7 реверсивного хода на ширину, задаваемую регулятором 8 хода /фиг.4/, рулевое колесо 9 /фиг.5/ для поворота подвески 10 колеса или диска. Гидромашина имеет статор 11 с линиями 12, 14 питания, ролик 13 или шестерню, замыкатели линий для утопания в роторе 15, взаимодействующих с рабочим материалом в замкнутых рабочих полостях 16 шиберов-поршней 17 и боковые крышки 18. Шиберы 19, их ролики 20 на осях 21 составляют варианты исполнения. Гидромотор /фиг.7/ с шестернями 22, кольцами 23 уплотнения установлены с возможностью самоподжима шиберов, реверсивной работы, непрерывного /без мертвых зон/ вращения и получения высокого момента для привода колеса и рабочего органа без редукторов и мостов. Гидромашины содержат ролики, подъем которых на 2-3 мм может отключить их, управлять скоростью и моментом. В каждом варианте статор и ротор воспринимают давления жидкости и деталей с двух сторон одинаково. Ролики-реакторы 13 могут заглубить поршни-шиберы 17, 19, 20, 21 в роторе 15 для перехода из одной рабочей полости 16 в другую, чтобы воспринимать давление сзади и вытеснять спереди, по ходу непрерывно прижимая шиберы к статору 11, т.е. компенсируя износ гидроподжимом, притирая поверхности трения и обеспечивая повышение ресурса деталей малой точности изготовления в период обкатки.
Рабочие органы 24 имеют оси 25, рабочие поверхности 26, крыло-маятник 27 /фиг.8/, дополнительные рабочие органы 28 в виде дисков, катков, зубьев на оси 29 или ромбики 30. На поворотной оси 31 установлены крылья 32, 33 для оборота пласта вправо и влево при вспашке одним или двумя лемехами 34. Эти крылья лапы-лемехи 35 на осях-стойках 36 составляют культиватор. На оси 29 или 37 с ограничителями 38 установлены 2 остроклиновых зубьев реверсивного рыхлителя 39 или и лопата 40 бульдозера, грейдера, планировщика, плуга 41, части диска с возможностью реверсивной работы в ведущем режиме. Уборка ножом 42 возможна с приводом колеса 51. Ножи, диски 43 установлены на поворотной оси для задания режима. Ножи 44, граблины 45 составляют уборочную секцию. Дисковый плуг имеет много режимов.
Крылья 32, 33, фиг.10, имеют загибы 46, 47 оборота почвы в обе стороны и для отгибки 48, 49 или ролики 50 малого и большого диаметра. Для выполнения дополнительных операций секция включает рабочие органы для лущения до вспашки /диски-предплужники 51 на оси 52 и диски-заплужники 53 на оси 54 / и диски с крыльями.
Вариант плужной секции содержит кривошип 55 с диском 56/отвалом /фиг.10д/ и ромбики для рыхления почвы до и после вспашки, т.е. в нижней и верхней частей пласта. Предплужники 57 /фиг.12/, фиксатор 58, вибратор-подъемник 59, кронштейн 60 колес установлены с возможностью снижения сечения пласта, сообщения вибрации и защиты от камней путем выглубления от перегрузки.
Прокат высокой готовности /фиг.13/ отвалов 32, 35 ромбиков, 30, треугольников 26, 27, 46, дисков 28, крыльев 27, 41, лемехов 34, 35, крыльев трапеций 7, 32, 33 отвалов граблин 6. Волновой рейки 47, 62, боковин, 63, стоек 36 - корпусов, шиберов 17, роликов 13 и шестерен, статора 11 и ротора 15, граблин 45, 46 /фиг.15/ рейки 65, роликов 66 с зубьями /фиг.15е/, цилиндров 67, ножей 68, стрелы 69.
Установка дисков между корпусами плуга с возможностью передачи заглубляющих сил дискам для их догрузки, выполнения функций предплужника, лущильника ограничителя глубины - укладчика сорняков.
Дисковый плуг самозащищается лучше, обходит камни.
Функции полевой доски плуга преобразуют в обработку почвы дисками 28 до и после вспашки. При этом трение и потери энергии заменяются качением и полезной технологической работой во всех /тормозном, нейтральном и ведущем/ режимах.
Крыло отвала на рабочей поверхности или за ней поворачивается сопротивлением, затем оборачивает почву. Здесь трение скольжения заменяют качением, крощением, изгибом и оборотом пласта роликами-крылом 32, 33 (фиг.20) на поворотных осях 55 или на качающейся оси /кривошипе/ 55 диском 56 - крылом отвала с возможностью самоперестановки, реверсивной работы /оборота почвы назад/ при ходе вправо и влево относительно энергосредства или в режиме оборотного плуга /с оборотом пласта в одну сторону/ при движении машины вперед или назад /в тягово-тормозном режиме/.
Диск-каток-отвал-крыло 56 дополняет плужный рабочий орган резания, снижает рабочую поверхность трения, заменяя ее поверхностью вращения сопротивлением пласта или дна борозды при принудительном подъеме диском пласта. На диске-крыле-катке-отвале неровности /зубья, выступы почвозацепы/ активизируют крошение и оборот, а плужную подошву разрушает круговые вырезы.
На кривошипе 55 диск 56 крыло-отвал трением пласта поднимается вверх, массой опускается, воздействует на почву частью круга. Это вращает со скоростью, пропорциональной радиусу площади контакта: пласт ближе имеет малую скорость, а к периферии скорость возрастает, создается различие скоростей, трений, крошения и усиливается оборот с радиусом. В случае жесткой посадки диска на кривошипе /исключения вращения качения и крошения пласта заменяется трением и оборотом пласта. В каждом случае диск-крыло выполняет функции почвоуглубителя разрушителя плужной подошвы. При установке диска с вырезом его качение по дну борозды создает вибрацию и снижает сопротивление плуга.
Крыло на рабочей поверхности или на тыльной стороне установлено с возможностью оборота тонкого пласта. Поэтому расстояние между плугами /шаг/ снижают. Это заменяет широкозахватных рабочих органов узкозахватными, а тонкий пласт крошится и оборачивается плугом, а также дообрабатывается дисками, зубьями-ромбиками, сошниками-катками до финишного состояния без тяжелого трактора и ущерба от его ходовой системы.
Предплужная обработка дисками/лущение заплужником 57, предплужником 28, 281 (фиг.10) на тыльной стороне плужного корпуса оставляет борозду с верхним слоем почвы, сорняками, удобрениями, снегом, поливной водой и др. материалами и при обратном ходе укрывает пластом чистой почвы. Возможна вспашка без заплужника с частичной запашной стрени отвала или крыла отвала в зависимости от производственной потребности.
Замена предплужника и заплужника дисками совмещает их функции с функциями колеса, т.е. диски с пользой используют заглубляющую силу и массу плуга для обработки верхнего слоя и укладки в борозду. Диски 28, 281 зубья, ромбики 30, катки-сошники для дообработки почвы после плуга, посева и частичного уплотнения доводят почву до финишного состояния за один проход /снижает число проходов пропорционально ширине захвата и числу операций/, крошат комки, уплотняют почву и сохраняет влагу в почве.
Фиксаторы 58, вибратор-подъемник 59, кронштейн 60 колеса 1,5 для защиты от камней и тяжелых почв повышают ресурс и экономичность.
В засушливом земледелии обработка почвы с запашкой снега или верхнего влажного слоя и работа в течение всего года повышают культуру земледелия: сближает периоды обработки посева высокой влажности, использует энергию солнца не для осушения верхнего слоя, а для подогрева более черного слоя и семян без опасности выхода в поле до схода влаги без сложных дорогостоящих и опасных для почвы ходовых систем тракторов, преобразуя их в катки для уплотнения почвы после вспашки и сохранения влаги.
В любой зоне возможна обработка почвы плугом и без него, дисками, лапами, катками, сошниками в зависимости от требований культуры и потребности в сохранении продуктивной влаги.
Крыло 32, 33 маятниковое автоматически изменяет угол установки: при снижении глубины опускается, при повышении глубины поднимается почвой и подъемная сила пласта уравновешивается силой тяжести при движении в любую сторону /вправо и влево/ в нетормозных режимах, а также право- и левооборачивающего корпуса при движении вперед и назад в режиме оборотного тормозного плуга.
В каждом случае крыло скольжения или ролики оборачивают пласт, прижимаются к корпусу. Дисковое крыло-отвал на тыльной стороне отжимается, вращается, отгибает, крошит и оборачивает пласт.
Способ обработки земли и управления реализуют путем расширения совмещения преобразования функции колес - источников сил и рабочих органов источников сопротивлений в малонапряженное и энергосберегающее воздействие на землю.
Малонапряженная обработка земли машиной включает снижение вредных напряжений, деформаций, уплотнения, затертости, резания, затвердевания от осушения, сжатия, снятия, сдвига, трения, сил, масс, работы органов резания и качения и повышения деформаций изгиба, крошения и остроклиновое рыхление, уравновешивание сил при малой нагрузке колес с возможностью преобразования функций колес и рабочих органов.
Агромашина работает следующим образом. Колесо 1 вращается от двигателя любого типа, поворачивается рулем 9, заменяется дисками - рабочими органами и само становится рабочим органом 5 /фиг.1-5/. Перемещаются или поворачиваются руки 3 с рабочими органами 7, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34 и т.д. при выполнении различных работ. Работа рабочих органов включает самоповорот вокруг осей 24, 25, 27 между ограничителями 38 под действием сопротивления почвы или иного материала, поочередное резание, подъем, крошение и оборот почвы, передачу реакции приводу в зависимости от режима настройки, определяя положение аналогично двойному маятнику с отличием сил и сопротивлений в зависимости от ширины и глубины. Рабочие органы резания, излома, крошения 27, 30, 34, 35, 39 передают вертикальную реакцию почвы рабочим органам качения 5, 43, 28, как это показано на фиг.9д, и в зависимости от режима тормозят Т, толкают Рт при перемещении со скоростью V хода и подачи /фиг.4е, 4ж, 9в, 9з/ при выполнении соответствующих работ.
Сталепрокат высокой готовности отвала 35 /фиг.13-15/, ромбов с лезвиями с 4-х сторон 7, 30, трапециевидных трехлезвийных лемехов 34, отвалов 32, лап, крыльев, ножей 35, 41, 61, полос 62, 63, стоек 36, шиберов 17, статора 11 и ротора 15 гидромотора, граблин 49, полос 65 для роликов 66, 67, ножей 68, полос 69 для механической руки и другие детали высокой готовности проката или штамповки без дополнительного нагрева доводят много конструктивных элементов до уровня, пригодного для сборки при очень малой обработке.
Рабочее и транспортное положение фиксируются фиксаторами. Рабочие органы самоустанавливаются на осях 24, 25, 29, 31, 36, 38 около ограничителей 42, положение которых можно настроить и определить режим работы: нагрузки, ширины захвата, глубины хода по принципу силового саморегулирования.
Колеса 1,5 являются опорами и средствами передвижения в нужном направлении со скоростью, соответствующей нагрузке на транспорте и кратности повторения работ при обработке земли. Колеса заменяют рабочие органы качения /диски, катки/ с возможностью самоуравновешивания сил заглубления и выглубления без дополнительных рабочих органов. При этом силовое регулирование стабилизирует нагрузку двигателя без колес, диски пашут самозащищаясь.
Механический привод колеса или рабочих органов передает основную мощность двигателя потребителю без двойного преобразования. Отбор мощности от муфты-насоса для гидропривода колеса 1 /фиг.4д/ или иного потребителя обеспечивает регулирование скорости движения в тяговом режиме изменением числа ведущих колес: с числом ведущих колес снижается скорость и наоборот скорость возрастает отключением гидропривода колес 5. Скорость движения регулируется изменением числа ведущих колес и схемы их соединения. Последовательное соединение гидромоторов привода колес 1 и 5 повышает скорость, а параллельное соединение снижает скорость. Комбинирование числа и схем соединения расширяет диапазон регулирования скоростей и сил тяги на транспорте. Гидропривод колес в сочетании с механическим приводом одного потребителя облегчает переключение скоростей механической трансмиссии в период передачи мощности гидроприводом, т.е. обеспечивает регулирование скорости механического привода гидроприводом. Совмещение функций гидропривода, гидросинхронизатора механической коробки, гидрокорректора скорости и без переключения шестерен выгодно для передачи основной мощности /до 90%/ рабочим органом /фиг.4д/ и привода колеса для гибкого регулирования скорости и повторности выполнения работ. Такая потребность возникает при сооружении и ремонте дамб, дорог, каналов, русл рек без множества проходов тяжелого трактора, а также при дистанционной работе рабочих органов на конце механической руки на неудобицах.
Самоустанавливающиеся колеса рук допускают поворот вокруг ведущего колеса.
Избыток или недостаток поворачивающего момента /управления/ изменяется блокировкой шарнира /ограничением самоповорота/ колес, их торможением, установкой впереди и сзади ведущего направляющего колеса, а также поворотом рук.
Установка ведущего направляющего колеса на поворотном рычаге дает поворот без вращения /фиг.1-4/.
Одно многорежимное/ведущее тормозное самоустанавливающееся, самоустраняющее ошибки, саморегулирующее глубину и чувствующее землю и ошибку траектории направляющее, догружающее или разгружающее до отрыва от земли в поле при установке опор-рабочих органов - заменителей колес с шиной-утилем и рессорой между осями поворота и вращения, фиксируемое на транспорте от самоустановки колесо заменяет рабочие органы /катков и дисков/ в режиме крошения комков и дообработки почвы до достижения желаемого финишного состояния, повторяют работу снижением подачи вперед и расширяет функции.
Приложение движущей силы впереди центра сопротивления повышает устойчивость смещением его назад /в толкающем режиме/, снижает курсовую устойчивость.
Установка колеса, толкателя и ведущих рабочих органов впереди тормозных рабочих органов повышает курсовую устойчивость. Смещение опор рук в сторону и вперед повышает устойчивость против опрокидывания. В любом случае одно направляющее ведущее колесо обеспечивает высокую поворачиваемость.
Направляющее колесо и диск поворачиваются органом управления с усилителем или без него на 150° вправо и влево. Это достаточно для поворота нулевым радиусом и управления продольным и поперечным движением без сложных мостов /настроек углов установки колес и шкворней, тормозов бортов, дифференциалов различных конструкций, механизмов их блокировки и управления, балластных грузов, догружателей колес и механизмов управления, затрудняющих автовождение.
Колеса-заменители рабочих органов или рабочие органы-заменители сложной ходовой части с механизмом поворота одного ведущего колеса снижают площадь поворота, массу и стоимость машин, потери энергии, напряжения почвы, избыток и недостаток управляемости, поворачиваемость, изменения радиуса поворота, ошибки вождения и автовождения.
Эти вопросы эффективно решаются различными многофункциональными, многорежимными рабочими органами реверсивного хода с возможностью настройки режима перемещения вперед и поперек оси или бокового хода /вправо и влево/, поворота на малой площади, защиты окружающей среды, реализации энерго-, влаго-, и времясберегающих процессов, минимизации количества движения /массы скорости/, а также числа колес и осей, стоимости производства техники и продукции земледелия и нагрузки человека.
Многоцелевой рабочий орган в зависимости от настройки работает в режимах движителя - частичного реактора, тормоза, толкателя, саморегулятора глубины, датчика курса, направителя в заданном направлении, разгружателя и догружателя колес, опоры, "якоря", регулятора нагрузки двигателя и колес в различных условиях, преобразователя и повторителя операции - технологических процессов с возможностью самоочистки, самоповорота, самоподачи вперед, самоподъема от перегрузки, самозащиты от камней, самоуравновешивания, самоторможения агрегата, саморегулирования движущей силы для технологического, рабочего, вспомогательного движения.
Гидромашина в статоре 11 между роликами 13 около ротора 15 имеет рабочие полости 16, в которых лопасти-поршни 17 совершают рабочие процессы мотора, прижимают трущиеся поверхности /компенсируют износ/, предотвращая утечку масла, повышают КПД.
Если линию 12 и 14 питания рабочих полостей 16 соединить с линиями напора Р и слива С гидросистемы посредством переключателей-распределителей типа "ИЛИ" /две позиции/, то диапазон регулирования скорости, крутящего момента и нагрузки регулируется переключением линий 12 и 14, а также объемов 16 с последовательного питания /одной скорости/ на другую /низкую/ при параллельном соединении. Правило соединения линий на двух скоростях таково: Н-14-12-С на низкой скорости, Н-14-12-14-12-С на высокой скорости.
Аналогичное переключение гидромоторов колес с последовательного питания на параллельное, а также включение и отключение гидромоторов, т.е. изменение числа ведущих колес, создает условия для сверхпотребного диапазона машинного регулирования скорости без сложных малоресурсных гидроагрегатов.
Широта регулирования крутящего момента высокоресурсного, высокомоментного гидромотора, обратимость, реверсивность, большая единичная мощность, компактность, самоподжим трущихся деталей, самовосстанавливаемость ресурса притиркой деталей, очень низкая потребность в точности, возможность совмещения обкатки, обработки деталей высокой готовности после грубой обработки или без него после проката многократно повышает уровень технологии производства и эксплуатации. Свойство самопритираемости и самоустраняемости зазоров по всему периметру контакта рабочих поверхностей устраняет потребность в высоком качестве материалов /металлов и масла/, тонкой очистке мала, сродстве и устранении высокой защиты от коррозии /она сама удаляется в первые минуты пуска/.
Взаимозаменяемость замыкателей рабочих полостей: роликов 13 и шиберов 17, их установка с возможностью гидроподжима путем соединения с напорной линией обеспечивает самоуплотняемость трущихся поверхностей.
Скорость движения регулируется изменением числа гидромоторов /числа ведущих колес/, переключением гидромоторов с последовательного на параллельное и наоборот, а также переключением рабочих полостей гидромоторов. Отключение одного или двух гидромоторов от насоса соответственно увеличивает поток /подачу/ в гидромотор остающегося ведущим колеса. Скорость снижается с увеличением числа ведущих колес и повышается скорость при снижении числа гидромоторов - потребителей энергии. Отключение рабочих органов повышает скорость транспортного движения. В каждом случае скорость определяют делением потока мощности между потребителями. Переключение потребителей и рабочих полостей гидромоторов - изменение схемы питания расширяет возможности регулирования скорости.
Ход, число и ширина захвата рабочих органов, скорость, шаг подачи вперед, перекрытие проходов и другие показатели определяют с учетом условий и правил: 1/ большой ход повышает массу привода и ширину захвата агрегата независимо от мощности двигателя, 2/ увеличение ширины захвата секций рабочих органов, повторности обработки и совместимости операций повышает эффективность использования энергии, минимизирует избыток или недостаток силы, массу, уплотнение почвы и буксование, 3/ ведущее направляющее колесо поворачивается для поперечного хода и управления более 135° в одну сторону, 4/ компактное транспортное сложение облегчает движение вдоль и поперек оси на ровном поле и на склонах, 5/ периодическая подача рабочих органов вперед при однократной обработке в конце и в начале хода тягачом, толкателем, переключателем мощности роботизирована. Поворотное маятниковое крыло самоприспосабливается к глубине и плуг совмещает функции лущильника, тяжелой и легкой бороны. Если поворот на 2-х осях силой тяжести и сопротивлением почвы недостаточен, то пружины или наклон поверхностей крыльев корректируют. Рыхлители перед плугом прочесывают землю, собирают валок из камней, защищают плуг от поломки. После очистки каменистого поля зубья устанавливаются за плугом и замещают функции борон, лущильников с возможностью изменения наклона и глубины хода.
Глубину хода и нагрузку на дисковые рабочие органы около плуга можно регулировать смещением их вверх и вниз на плуге перестановкой по отверстиям /фиг.12б, 11в/ или кривошипом. Такая настройка глубины стабилизирует уравновешенность и процессы самозаглубления и самовыглубления, блокирования осей, самоуравновешивания сил, самоповорота вокруг двух осей; тонко- и толстопластовой обработки в зависимости от шага установки рабочих органов; взлома и изгиба пласта, резания и качения в ведущем, нейтрильном и тормозном режимах. Самоповорот /самонаклон/ допускает адаптивную работу в качестве плуга, лущильника, тяжелой и легкой бороны с возможностью коррекции силы тяжести грузом или пружиной.
Самоуравновешивание секций сменных рабочих органов позволяет работать в режимах дистанционного и эстафетного действия широкозахватного агрегата; преобразования функций опор и рабочих органов; балансировки сил и масс: сочетания рабочих органов разрыва и резания почвы, качения; совмещения технологических защитных, кибернетических и эргономических функций; качения рабочих органов по почве или пласта по роликам, каткам и крошителям комков - отделителям клубнеплодов; самовыглубления и самозаглубления до стабилизации нагрузки двигателя; самоповорота и изменения ширины пласта и нагрузки без изменения глубины.
Самозаглубление одного рабочего органа сочетать с самовыглублением другого, т.е. самоуравновешивать силы независимо от массы при вспашке, планировке, нарезке гряд, рыхлении и на других операциях, можно с большой технологической и экономической эффективностью. Защита и силовое регулирование при этом облегчаются, а переключение энергопотока привода и управления ускоряет действие подъема без изменения глубины и ширины хода, стабилизировать нагрузку двигателя можно поворотом рабочего органа /изменением ширины и подачи/. Независимо от нагрузки двигателя и ширины захвата регулируется скорость движения и повторность обработки земли.
Без крыла плуг оставляет полоску стерни, снижает эрозию. Крылья с роликами хорошо крошат комки. Крылья большой длины допускают глубокую пахоту. Автоматическое уравновешивание сил тяжести крыла и реакций почвы при различной глубине обработки почвы придает адаптивное свойство /тождественность/ операциям. Секции плугов, дисков, предплужников, катков и др. рабочих органов составляют линейную секцию /модуль из секций/ секций поворотных /самоустанавливающихся/ без широких переходных полос или перекрытий ходов, без потерь рабочего хода. Это облегчает подачу секций вперед по борозде или чередовании ходов их и агрегата /подачи вперед/, переключение энергостоков у мощного агрегата. Остроклиновые (заглубляющие) зубья 39 на дисковой батарее 25 за плугом и диск 25 перед плугами уравновешивают секцию и дообрабатывают почву до желаемого состояния.
Смещение оси соединения секции с брусом снижает изгибающий момент бруса привода. Знак этого изгибающего момента изменяется. Знакопеременность требует снижения изгибающего момента до значения, достаточного для самоповорота секции рабочих органов.
Смещение "с" точки соединения секции с брусом снижают до минимума изгиб бруса знакопеременной силой привода. Минимизация смещения оси от центра сопротивления и изгибающего знакопеременного момента, момента сопротивления, массы и сил инерции полезно и шпренгелями нужно компенсировать до желаемого запаса прочности. Одно кругоповоротное ведущее колесо-копир борозды и опоры около рабочих органов при доставке движущей силы соответствует требованиям, горного земледелия. Борозда-микротерраса является наиболее простой и дешевой базовой линией для движения машины. Террасы, дороги и каналы для полива можно формировать накоплением борозд, валиков, камней и почвы, т.е. использованием технологического сдвига почвы и камней совмещением обработки почвы со строительством. На каменистом поле такое совмещение операций обработки почвы со строительством террас, дорог и каналов обеспечивает рыхлитель из 2 остроклиновых зубьев и ромбиков перед плугом или плугом из ромбиков для выкопки камней при малом угле поворота и вспашки с поворотом до желаемой ширины. Изменяя угол установки и ширину захвата, регулируют нагрузку.
Механическая рука подвижна в пространстве около всех сторон и над энергомодулем. Фиксация положений, плоскости действия, пределов хода, дистанционность, симметричность, уравновешенность сил и моментов подачи, заглубления и выглубления, перемещения и удержания, разгона и торможения в любой плоскости настраивается.
В вертикальной плоскости силы легко уравновешиваются установкой рабочих органов качения и резания, заглубления и выглубления, наклона лезвий вперед и назад для сочетания скольжения, крошения, скольжения под и над пластом земли, воды и др. материалов. Постройка и очистка дорог, дамб, террас, берегов рек и др. сооружений легко роботизируется в любой /и горной/ зоне.
Технологическое смещение почвы на склонах зависит от соотношения сил GпVп/2g+Gпsinβ<ϕпGпcosβ=ϕп-tgβ=V2/g;

где Gп/g, Vп - масса и скорость оборота пласта;
ϕ - коэффициент сцепления пласта;
β - угол склона;
α - угол установки лемеха;
Vp, V - скорости работы и подачи.
При ϕп<tgβ почва смещается сама, при ϕп=tgβ·Vп=0.
При ϕп=0,5; β=18°; Vп=1,9 м/с.
При обороте пласта вверх Vп=4 м/с.
При технологическом смещении почвы одной рукой вниз можно на готовую террасу нанести почву сверху и на оголенном месте построить террасу, на которую можно нанести почву сверху и т.д. Почва выравнивается одной рукой. Это повышает уровень технологий террасирования также до робототехнологий.
Сопротивление рабочего органа плуга при обороте пласта вниз по склону снижается пропорционально углу крутизны. Резание пласта и сопротивление движению рабочего органа остаются без изменения, а на подъем, крошение и оборот пласта снижается.
При этом расход энергии на оборот пласта снижается до нуля при ϕп≤tgβ.
Перемещение рабочих органов поперек склона /движение агрегата вдоль склона/ стабилизирует нагрузку и функции. Движение машины поперек склона /по горизонтали/ дестабилизирует. При преобразовании сопротивления рабочего органа в силу плуга коэффициент сцепления ходовых систем и рабочих органов отличается в 10-15 раз и превосходит сопротивление подъему Gsinα многократно.
Технологическая эрозия почвы /смещение пласта при вспашке/ при поочередном изменении направления движения на полях крутизной до 10° близка к нулю. Чередование методов вспашки и выравнивание полей затрудняется, возникает необходимость в дополнительных обработках. Этот недостаток устраняют оборотом пласта назад /изменением/ направления движения широкозахватного агрегата с прямолинейно-возвратно-поступательным движением рабочих органов и ровной обработкой без обезображивания полей поворотными полосами.
Две руки с лыжами и почвозацепами продольного хода или рабочими органами - якорями создают толкающую силу и дополняют известную колесную ходовую часть там, где требуется высокая проходимость. При этом технологический процесс не выполняется и "руки" работают в режиме движителя. Механические руки - носители лыж перемещают машины вместе или поочередно. Одно направляющее колесо и две "руки" с лыжами /заменителями колес/ колесная формула 1 к 1 и 1 к + 2 руки могут поднять часть машины толкнуть вперед, опустить на землю и повторять такое движение, чередуя с остановками или поочередно, толкать руками при непрерывном движении.
При узкопластовой вспашке с рабочими органами малой напряженности сдвиг земли за час снижается в 3 раза. Обработка поворотных полос снижается в 30 раз, почти до нуля. Малый шаг установки и самоочистка рабочих органов устраняет много рядов /следов/, затрат энергии на качения и буксирования, балластоперевозку; потери времени, влаги, сроков "спелости" почвы, энергии, ресурса, металла; множество типов тракторов, сельхозмашин, ходовых систем, средств управления /роботизации/; зависимость от внешних условий.
Малонапряженная обработка земли отличается размерами пласта, напряжениями, способом достижения целевого состояния и результатом. Тонкопластовая обработка остроклиновым и узкозахватными рабочими органами резания и качения, преобразование массы и заглубляющих сил в технологическую силу изгиба, крошения комков и укатку почвы для сохранения влаги; снижение трения, сжатия, сдвига, смятия, среза, сцепления связности и осушения, преобразование тягово-тормозных функций колес и рабочих органов в технологические управляющие опорно-динамические и защитные - формируют режим малонапряженной, малоэнергозатратой обработки. Сочетание функций и режимов колес и рабочих органов минимизируют опасные напряжения с большой эффективностью.
Колесо выполняет опорно-ходовые, тягово-динамические, контрольно управляющие, технологические, приводные функции.
Опорно-ходовые функции включают работу колеса в ведущем, ведомом, нейтральном, свободном, тормозном самоустанавливающимся направляющим режимах в камерном и бескамерном вариантах различной грузоподъемности и сцепления с полной поверхностью.
Тягово-динамические функции выполняют в тяговом тормозном режимах: движения вдоль и поперек оси, поворота нулевым радиусом.
Контрольно-управляющие функции ходовой системы включают работу в качестве датчика сил и коэффициентов сцепления, сопротивления качению дорожного сопротивления, динамического фактора, курса радиуса поворота, тягово-тормозной сил, ведущего момента, нагрузки двигателя и приводов, силового регулятора, средства-преобразователя колебаний сил и рамы, утилизатора энергии колебания сил и рамы, источника сил движения и торможения, мягкой опоры, удержания, подъемника рабочих органов, стабилизатора курса, средства поворота и стабилизатора опорных реакций на склонах.
Технологические функции колеса включают работу в качестве катка-заменителя полевой доски, копира борозды, бороны-крошителя комков, катка для укатки почвы и сохранения влаги, регулятора глубины обработки земли, вибратора.
Приводные функции колеса включают режимы подъема лыж шагающего движителя и привода рабочих органов продольного и поперечного хода /после отрыва от земли/, преобразованием рамы из складывающихся рук с колесами в носителя рабочих органов и силового их привода. Гибкость функции многорежимных рабочих органов и технологий земледелия повышают сочетая технологической, тягово-динамической, защитно-регулирующей, опорно-управляющей, эколого-экономической функций.
Технологические функции рабочих органов включают вспашку широким и узким пластом, крошение, оборот до желаемого состояния поверхности, лущение, боронование, культивацию, планировку, прочесывание, прикатывание, копку, посев, кошение, сгребание, культурно-технические, дорожные землеройные работы. Террасирование склонов как и дорог, но и нанесением почвы и распределением ее, вспашку саморегулированием ширины /угла/ и нагрузки в соответствии с условиями, сочетаемостью, совместимостью поверхности, операции за один проход, стыкуемостью ходов, шириной захвата, дистанционностью действия и стабилизируемостью нагрузки.
Защитно-регулирующие функции рабочих органов включают самоочистку, самоповорот, самозащиту, самонаправление, самовыглубление, самоподачу вперед, самовключение при холостом ходе, самозаглубление, самоуравновешивание сопротивлений и сил заглубления и качения, самоторможение в конце хода, самовключение продольного хода с учетом заданной кратности повторения работ, допустимой силы воздействия на энергосредство, достатка и избытка сил колес в продольной и поперечной плоскостях, дистанционности работы и регулируемости нагрузки, скорости и производительности.
Опорно-управляющие функции рабочих органов - работа в качестве опоры, навески, привода поддержки устойчивости положения и траектории. Сочетание вспашки без ходовой части, полевой доски с рыхлением /заменой функции полевой доски рыхлением /вредной работы полезной/ без нарушения равновесия повышает технологическую полезность.
Эколого-экономические функции включают снижение вредных напряжений и деформаций, уплотнения, трения, резания, снятия, сдвига, смятия, среза /сцепления, связности без осушения, переувлажнения и т.д./, а также использованные полезные напряжения и деформации крошения, рыхления, изгиба и оборота без ущерба человеку, технике и почве, перевод рабочих органов торможения ходовой части в режиме толкания и гармонизации скорости, ширины захвата и повторения работы без дополнительных рабочих органов или проходов агрегата по полю, энерго-, ресурсо-, влаго-, почво- и времясбережения и повышения свето- и теплотехнического КПД.
Машина является заменителем трактора и системы сельхозмашин. Привод и режимные рабочие органы переориентируют земледелие на использование машины в течение года и защиты техники и почвы во всех странах. Это объясняется тем, что при обработке почвы рабочие органы-опоры, разгружатели, заменители ходовой части создают новую связь энергетических и технологических модулей с почвой. Эта связь преобразует массу в вертикальную технологическую силу и решает проблемы разуплотнения почвы, эффективности ее обработки, снижения зависимости техники от рельефа, влажности, времени года.
Поэтому функции и режимы рассмотрены применительно к требованиям различных зон с точки зрения сочетаемости и совместимости функций.
Динамика функции рабочих органов дополняется.
Преобразование сопротивлений рабочих органов в силу снижает функции ходовой системы до нуля. Сочетание опорных функций ходовой системы и рабочих органов преобразует массу в технологическую силу без ограничения отношения силы к массе - коэффициентом сцепления колес с почвой.
Перевод колеса в режим катка для обработки почвы после вспашки преобразует уплотнение почвы до обработки в обработку почвы после вспашки.
Сочетание ведущего, нейтрального и тормозного режимов выполнения технологических процессов одного рабочего органа устраняет недостаток и избыток сил, зависимость от массы, условий местности и типа ходовой системы.
Преобразование сопротивления рабочих органов в подъемную силу вносит в работу силовое регулирование, защищает от перегрузки и поломки при встрече с камнем. Повторение работ за один проход одним рабочим органом повышает все показатели работы, снижая скорость.
Самоуравновешивающиеся рабочие органы перемещаются в режимах самовыглубления при встрече с камнем и самозаглубления на высоком уровне балансировки противодействующих сил и масс;
- самоподачи вперед или реверсирования около камня в зависимости от настройки, возможного сочетания этих режимов и самоуравновешивание машины в режиме быстрого подъема при перегрузке.
Режимы самовыглубления и самозаглубления рабочих органов - заменителей ходовой части из проката высокого уровня готовности деталей снижает число типов и трудоемкость производства и использования. Балансировка масс и сил в вертикальной опорной плоскостях переориентирует заводы и земледелие на новый принцип:
на снижение числа типов и трудоемкости производства, а также потерь энергии, влаги, ресурса, металла и урожая.
Сочетание режимов резания и качения /дисков, катков, роликов/ полезно для балансировки сил и масс в вертикальной и опорной плоскостях, сочетания разрыва изгиба, крошения и резания почвы при малом сжатии пласта в период оборота.
Преобразование колес в рабочие органы для дообработки земли - заменителей дисков, борон, катков, т.е. установка колес за рабочими органами, устранение уплотнения почвы, колес до ее обработки, исключает осушение и уплотнение почвы /потери продуктивной влаги и агросроков/ и потребность в балластоперевозке, повышает проходимость, уравновешенность и управляемость, заменяет лущение, боронование и уплотнение.
Замена колес дисками, поворот дисков механизмом поворота многократно повышает управляемость: диски, плуги, и др. почвообрабатывающие рабочие органы превосходят по числу и сцеплению с землей.
Колеса преобразовать в технологические рабочие органы, рабочие органы - заменители колес в опоры и средства управления поворотом можно без ущерба эксплуатационным качествам при обработке земли в различных /и горной/ зонах.
Диски имеют высокое боковое сцепление и заменяют колеса, используют вертикальную силу /массу-балласт/ для дообработки земли. Если сопротивления рабочих органов равны и противоположны по знаку, то потребность в рабочих органах-опорах не возникает.
Самоустановка зубьев под острым углом, самоповорот, самозаглубление без балласта минимизирует сжатие, сдвиг, смятие, сцепление и уплотнение: повышает изгиб, крошение, разрыв, рыхление в различных режимах независимо от массы. Снижение массы и числа рядов зубьев, их самоочистка от биомассы, работоспособность на засоренном поле, разгрузка ходовой части; возможность настройки заглубляющего и выглубляющего режимов; перемещения биомассы, комков, камней или урожая в одну сторону расширяет функциональные возможности.
Перемещение зуба для взлома пласта и рыхления подъемной силой /взаимодействие с почвой верхней плоскостью/ и скольжение над землей совмещает две работы. Установка этих зубьев на одной оси самоповорота /самоврезания в почву/ до упора в ограничитель обеспечивает непрерывность двух работ /рыхления и уплотнения или посева/. Каждый зуб поочередно повторяет работы.
Ромбик - рабочий орган без крыла или с крылом на тыльной стороне работает в режиме самозаглубления, самовыглубления, самоуравновешивания, рыхления бульдозерной лопаты или лопат в шеренге или в ряду корчевателя камней, крошителя комков, ножа-резака земли и других материалов /при блокировке вертикальной оси/, плуга, планировщика, бороздореза, грейдера, предплужника, почвоуглубителя.
Установка ромбиков на оси для работы в режиме многозубчатых тел качения /тяжелой бороны/ или самоустанавливаемость ромбиков, возможность изменения шага /ширины захвата/, сечения пласта, легкого изгиба, взлома вверх и в сторону снижает энергозатраты. Интегральная энегосберегающая обработка возможна малонапряженным энергоемким воздействием, почворазрывающей вспашкой, взломом, крошением, рыхлением, оборотом, изгибом и перемещением земли при формировании дорог, рек, каналов, а также дистанционной работой в воде, под водой, в огне, без множества проходов и рабочих органов, тормозящих ходовую часть трактора.
Рыхление без вертикальных зубьев, крошение, взлом и изгиб в сторону меньшего сопротивления при перемещении без нагружения ходовой части, наоборот, ее разгрузкой, сочетанием рабочих органов взлома, крошения, скольжения, качения настройкой режимов работы при малом или нулевом участии колес, а также их разгрузкой в режиме нагружения рабочих органов заменяет боронование более эффективной интегральной почвозащитной обработкой.
Рабочие органы качения /диски, катки/ обходят препятствия, прижимаются к земле массой и заглубляющей силой рабочих органов резания, обрабатывают почву до желаемого состояния повторением работ за один проход.
Вертикальные зубья, ножи, стойки рабочих органов сжимают землю, требуют заглубляющей силы /балласта; массы/. Заменить сжатие разрывом и ломкой пласта по малому сечению можно и снижением ширины рабочего органа или взломом пласта вверх. "Спелость" почвы способствует этому, снижает энергозатраты и кратность обработки и повышает эффективность работы.
Поэтому наклон зубьев в сторону перемещения, перевод вертикальных зубьев в реверсивно самозаглубляющееся положение повышает эффективность хода ведущего нейтрального или тормозного режимов.
Перевод вертикальных зубьев сцепления в положения взлома, резания, рыхления и скольжения земли по рабочему органу остроклиновому или тупоклиновому (для скольжения по земле) расширяет функции наклоном: при наклоне вперед рабочий орган самозаглубляется, но при обратном ходе самовыглубляется. Здесь возможна работа ромбовидного рабочего органа в режимах.
Малоэнергозатратно землю обрабатывают при малых напряжениях /малонапряженинно/ малоэнергозатратными рабочими органами 26, 27, 28, 7, 39, 40, 41, 57 в виде трапеций, сегментов, ромбиков, треугольников, дисков, катков, зубьев, сменных адаптивных крыльев в режимах движителя, реактора, тормоза, толкателя, саморегулятора оборота пласта и глубины, датчика курса и нагрузки, разгружателя или догружателя колес, преобразователя и повторителя операций с возможностью самоочистки, самоповорота, самоподъемника от перегрузки, самозащиты от камней, самозаглубления, саморегулирования движущей силы.
Малоэнергоемкая, малонапряженная обработка включает энергосбережение производства деталей из проката высокой готовности, обработку "спелой" земли, сочетание рабочих органов резания и качения, излом пласта малого сечения, устранение уплотнения почвы колесами до вспашки, снижение числа рабочих органов и проходов по полю, обработку до желаемого состояния, свойства колеса 5 согласования сил и перехода выступов выше диаметра, замены диском и работы по дообработке за плугом /фиг.1, 2, 5/, преобразуемость массы и сил заглубления в крошение комков. Выборочность и очередность установки рабочих органов резания и качения, обработкам с учетом совместимости операций и сочетаемости рабочих органов, требуемой повторности воздействия на землю.
Желаемое состояние задается человеком и датчиком технологической достаточности.
Крутоповоротное колесо 1,5 поворачивает машину нулевым радиусом и двигает поперек без сложных рулевых, трансмиссионных и мостовых систем.
Целевое положение задается водителем и автоводителем, копируя базовую линию, выверку на вешку, самонаправляющим колесом или диском-датчиком курса. Достаток сил, сцепления с почвой и угла облегчает поворот по закону R=BV/ΔV; V=RΔV/B; R→0, V→0, где V, ΔV - скорость и разность скоростей бортов, В - ширина колеи, снижает зависимость от крутизны склона, влажности, массы и человека.
Сталепрокат, штамповку, прессование, ковку и другие горячие обработки совмещаются без дополнительных нагревов и охлаждений, доводят до высокой готовности детали привода и рабочих органов. С колес снимается 40% потерь энергии, 90% мощности, 60-80% массы и стоимости, 100% паразитной мощности и нарушений распределения ее с учетом реакций и курса, зависимость от влажности, склона / "спелости" почвы/.
Новый принцип соединения функций энергетических и технологических средств и совмещения операций реализуют без сложных трансмиссий ходовых систем и механизмов поворота. Взаимодействующие рабочие органы, режим работы которых настраивается, облегчают движение вдоль и поперек загона при очень малом холостом ходе без регулирования разностей скоростей и сил колес правого и левого бортов. При этом ошибки исполнения команд управления, опасность поворотов на склонах, зависимость радиуса поворота от колеи и базы снижаются, потребность в настройке углов наклона осей и колес устраняется. Согласование сил и сопротивлений рабочих органов линейного хода минимизирует нагрузку колес и механизмов поворота, допускает поперечное движение и поворот нулевым радиусом. Эти свойства влияют на эксплуатационные качества агрегатов.
Отсутствие колеса большого диаметра /ограничения угла поворота/, рулевой трапеции, переднего и заднего мостов, сложных трансмиссий, механизмов управления /поворота/ и ходовых систем обеспечивает свободу выбора радиуса поворота, горизонтальной проходимости и поперечного хода.
При установке одного ведущего крутоповоротного направляющего колеса и самоустанавливающихся опор, поддерживающих положение по настройке, повышается гибкость кинематики.
Одно колес работает без большого бокового сопротивления и увода на повороте, трения дифференциала /его нет/. Управляемость сохраняется при малой сцепной силе, на влажном поле и на склонах за счет использования сил сопротивления рабочих органов.
Большая свобода поворота колес, возможность изменений колеи, базы и схемы установки открывают новые возможности: поворота вокруг фиксированного центра - датчика кривизны траектории или вокруг - датчика, ведущего направляющего колеса и рабочего органа, а также трогания с места в желаемом направлении. При этом вектор скорости поворачивается более 180° и изменяет знак /при реверсе/, это дает эффект "кругового поворота". Соединение рабочего органа с механизмом поворота повышает сцепление с землей, снижает увод и сползание под действием боковой силы, повышает управляемость и устойчивость.
Недостаток или избыток движущей силы рабочих органов снижаются настройкой и уравновешиванием рабочими органами - заменителями частично функций колес. При этом подают вперед толкающей силой рабочих органов, прерыванием торможения и толкателями с приводом от конечного упора реверсивного хода.
Режимы /ведущий, нейтральный, тормозной, направляющий, самоустанавливающий, самоуравновешивающий силы: резания, качения, сопротивления и тяги, толкания, подачи и торможения, рабочих органов/ настраиваются с возможностью замены колес или перевода колес в режим работы дисков, катков, борон, лущильников.
Агромашина содержит технологические колеса или технологический режим /настройкой задается нейтральный, тормозной, транспортный режимы/. Рабочие органы, фиг.8, устанавливаются в ведущем, ведомом, нейтральном, тормозном, транспортном, опорном /диски, катки/ направляющем /поворотом руля/, стабилизирующем, удерживающем, взаимно уравновешивающем, заглубляющем, выглубляющем, режущем /дисковое орудие/, преобразующем гравитационную заглубляющую силу в технологическую силу рабочих органов дискового типа.
Вспашку, дискование, боронование, каткование совмещать, уравновешивать силы тяжести, заглубления, давления на диски и выглубляющей реакции почвы без дополнительного балласта можно при очень малой массе энергосредства и сверхвысоком сцеплении ходовой части с землей, заменой колеса рабочими органами и рабочих органом колесом, заменой тягово-тормозного режима работы трактора и почвообрабатывающей машины режимом экологически безопасной обработки земли, самоуравновешивания сил заглубления и выглубления в вертикальной плоскости сил тяги и сопротивления в горизонтальной плоскости. Новый принцип взаимодействия энергетического и технологического модулей реализуют согласованием сил и сопротивлений движителей во все стороны /вдоль и поперек поля/ нетормозных рабочих органов без сложных трансмиссий, ходовых систем и механизмов поворота. Технологические модули с рабочими органами линейного хода выполняют различные операции почти без поворотных полос и холостого хода. Это достигается движением поперек поля без регулирования разности скоростей и сил, вдоль загона без ложных поворотов на уклоне, сложных настроек шкворней и колес, а также трудностей изменения колеи и направления /реверса/. Существенно улучшаются технико-экономические показатели устранением отрицательного воздействия ходовой части трактора на почву, дальнейшим повышением уровня технологии и техники, энергосбережения, экологизации, замены типажа тракторов и системы сельхозмашин тормозного действия многофункциональной машиной - полуагророботом применительно к внешним условиям. Дисковый плуг лучше самозащищается от пней и камней, заменяет колеса борон и лущильников.
Агромашина реализует способ, создает условия для роста растений, повышения плодородия почвы и урожая без отрицательного влияния ходовой части /колес и гусениц/ на почву в различных зонах земледелия и в различных режимах:
- эффективного использования времени года, металла, ресурса, энергии, воды поливной и продуктивной в почве путем выполнения различных операций обработки земли до желаемого состояния одной или двумя механическими руками; на любой /и пересеченной/ поверхности;
- транспортного движения и перевозки грузов в широком диапазоне скоростей без сложных трансмиссий и ходовых систем;
- склонохода переменной структуры и геометрии для движения по дорогам, борозде, склону, поливному каналу, реке, террасе,
- выполнения энергоемких работ без тяжелых тракторов до желаемого состояния,
- носителя и привода реверсивных рабочих органов,
- машины переменного вектора и изменяемой структуры, машины высокой продольной и поперечной проходимости;
- преобразователя автомобиля в энергосредство привода рабочих органов и заменителя трактора или иного мобильного энергосредства, или отбора мощности двигателя;
- силового регулятора и подъемника;
- шагающего движителя с возможностью непрерывной подачи и получения технологической движущей силы и утилизации избыточной силы путем подачи на вход привода:
- широкого изменения базы, ширины колеи, ширины захвата агрегата, радиуса поворота;
- преобразования функций в соответствии с производственной потребностью, изменения места расположения рабочих органов и скоростей движения;
- изменения кратности повторения работ за один проход и без дополнительных рабочих органов или комбинирования функций и рабочих органов;
- стабилизации мощности и нагрузки двигателя без сложных трансмиссий при желаемой ширине захвата с высокой технологической эффективностью.
Преобразование опорно-тяговых функций ходовой части в технологически полезную обработку земли изменяет основу механизации и роботизации земледелия и системы "машина-местность-растения", так как устраняет принцип оценки физико-механических свойств почвы (плотности, твердости, водопроницаемости, сопротивлений сжатию и сдвигу, уплотняемости, защемляемости, допустимой напряженности) с точки зрения динамики колеса, затруднения действий рабочих органов и жизнедеятельности растений пропорционально силе, скорости, числу проходов по полю, массе, буксованию, влажности и т.д. Это создает технологический, биологический и экологический эффект.
Преобразование колес - источников сил и рабочих органов - источников сопротивлений /противодействий колесам/ в средство содействия жизнедеятельности растений /повышению плодородия/ устраняет потребность в плотности, твердости, сопротивлениях и напряжениях без ущерба проходимости, без опасности буксования, т.е. преобразует энергозатратную высоконапряженную обработку в малонапряженную энерго-ресурсо-влаго-почво-времясберегающую плодородную концепцию /способ обработки/ при желаемой ширине захвата и любой мощности и производительности. Устранение полевых досок, неуравновешенных сил заглубления и выглубления, а также боковых реакций - нарушений устойчивости также полезно.
Устранение зависимости мощности от сил сцепления колес с землей, дифференциала, его блокируемости на склоне и на влажном поле, регулирование нагрузки рабочими органами /их числом, глубиной и углом установки/ без изменения их скорости, передаточного числа привода и вала отбора мощности облегчает регулирование разности сил и скоростей бортов - поворот-выполнение управляющих /рулевых/ функций без дифференциала и направляющих колес - регуляторов сопротивлений.
Фиксатор 58 фиксирует рабочие органы в двух /рабочем и транспортном/ положениях. Рабочие органы поднимают рукой, зацепом, приводом и гидроподъемником. Шарниры шпрегелей и секций рейки поддерживают прочность и облегчает компактное сложение.
Качание рычагов /рук/ по дуге включают работу при поперечном ходе и подачу на шаг в начале продольного хода. Такая смена работы шаговой подачей облегчает шагание рабочими органами без дополнительных толкателей или тягачей. В конце каждого рабочего органа продольная подача преобразует режим и функции: из ведущего или нейтрального режима рабочие органы сами переходят в толкающий /тянущий/.
Автоматическое изменение режима без упоров, датчиков, усилителей упрощает работу, поворот машины одной рукой, движение руками вместе или поочередно для повышения проходимости во внедорожном транспортном режиме.
Рычаги и гидроподъемник трактора составляют стреловой кран или тяговый погрузчик кузова, контейнера и т.д.
Объемные многорежимные машины заменяют сложную трансмиссию, мосты, смазочные системы, регуляторы скорости, вал отбора мощности, подъемники, силовые регуляторы, механизмы поворота, дифференциалы с механизмами блокировки, системы регулирования, нагрузки, скорости, гидромуфты, гидростартер, гидроувеличитель сцепного веса, пневмо- или гидропривод тормозов и сами тормозные системы, подвески, утилизаторы теряемой энергии.
Широкая унификация приводов колес и рабочих органов облегчает производство унифицированного ряда машин различной мощности и их использование, повышает ресурс, уравновешенность, безопасность и возможность роботизации управления тракторами, склоноходами, комбайнами, дорожной, боевой, строительной, аварино-спасательной техники на основе однотипного узла. Малоэнергозатратность рабочих органов тонкопластовой обработки дополняется заменой ряда дублирующих линий непрерывного отбора энергии - совмещением энергопотоков и функций потребителей энергии с учетом кратковременного текущего корректирования и ситуативного управления. Функционально-временное переключение и распределение энергии между потребителями с учетом функций, курса, реакций опорной поверхности, режимов движения и торможения, а также кратности повторения, степени преобразования сопротивления в силу и массы в силу торможения или технологического воздействия движителей, рабочих органов, средств управления или торможения заменяет технологический ущерб энергии и массы в технологическую пользу /устранение ущерба и превращение его в пользу удваивает полезность/, устраняет уплотнение до вспашки и повышает качество обработки после вспашки.
Малоэнергозатратности способствует и упрощение машин и линий передачи энергии к потребителям без сложных муфт, коробок скоростей, делителей потоков энергии - дифференциалов, систему управления, механического и гидравлического отбора мощности, рабочего, вспомогательного и электрического оборудования и средств управления ими. Замещение функций компонентов техники без обрастания массой, замена узкофункциональных элементов и энергопотоков более эффективно решает фундаментальные проблемы металло-энерго-почвовлаго-, времясберегания, например, это подтверждается тем, что экологичность, технологичность и эффективность работы колес /10%/, ног и гусениц /40%/, реверсивных рабочих органов /95%/ по критериям эффективности использования массы, площади, времени и энергии гарантирует соответственно повышение уровня технологий производства и использования машины новой концепции малоэнергозатратного удовлетворения потребностей в продукции земледелия.
Малоэнергозатратность, малоэнергоемкость обработки земли до желаемого состояния, поддержание целевого положения без тяжелых тракторов, склоноходов и мостов и другие задачи механизации и роботизации земледелия решаются такими методами, способами и свойствами, как преобразование тракторных многомашинных экологически опасных дорогостоящих агрегатов в приводы многофункциональных реверсивных выборочных, быстросменных самоходных рабочих органов, преобразование требований колеса и машины к плотности, твердости, осушенности почвы в условия для жизнедеятельности растений и биоорганизмов; преобразования зависимости сил и числа рабочих органов от сцепного веса /класса/ трактора; совмещение и преобразование технологических и динамических показателей при обработке земли до желаемого состояния самоходными рабочими органами без множества колес и гусениц, повышающих проходимость и стоимость крюковой мощности в два раза; распределение сил по реакциям и регулирование сил без изменения скорости и сложных коробок передач пропорционально сопротивлениям; самоуравновешивание сил заглубления и выглубления рабочих органов резания и качения; самоочищение реверсивных рабочих органов; повышение устойчивости положения и курса на склонах без сложных стабилизаторов и ходовых систем; повторение обработки земли без множества проходов по полю и большой ширине захвата; преобразование зависимости работоспособности от свойств и влажности почвы без ущерба жизнедеятельности растений с большей технолого-биолого-экономической и экологической эффективностью: преобразование функций дисков с выгодой до 6,7 раз; преобразование тракторов и мостов в одноколесные или одноосные модули привода рабочих органов и 20-30-кратного улучшения сцепления с землей; преобразование трактора и других энергетических средств в полуагроробота применительно к внешним условиям.
Малонапряженная обработка малоэнергозатратными режимными рабочими органами повышает уровень технологий производства техники и продукции земледелия: снижает в 3-4 раза стоимость ходовой части, устраняет 6-7-кратные потери времени и площади действия колес и фрез, улучшает в 30 раз сцепление и силу, снижает напряженность почвы, т.к. напряженность металла тяги рабочих органов в 10 тыс. раз выше, снижают известные органичения ширины, мощности, производительности, устойчивости, управляемости. Замена силы колеса силой привода рабочих органов в 2-3 раза снижает потери мощности /стоимость мощности.
Малонапряженность взлома и изгиба пласта без уплотнения почвы колесами тяжелого трактора хорошо защищает человека, технику и землю, создает гармонию техники, технологий и природы в любой зоне.
| название | год | авторы | номер документа |
|---|---|---|---|
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| АГРОМАШИНА | 2004 |
|
RU2342821C2 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2222129C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 2001 |
|
RU2232490C2 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2226326C2 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ | 1996 |
|
RU2170497C2 |
| ДВИГАТЕЛЬ САМОХОДНОЙ МАШИНЫ | 2010 |
|
RU2450135C2 |
| СПОСОБ УПРАВЛЕНИЯ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2094970C1 |
Изобретение относится к сельскому хозяйству и может быть использовано для обработки земли. Способ включает обработку земли рабочими органами. Доработку почвы после вспашки осуществляют путем крошения комков для сохранения влаги и продуцирования биомассы колесами агромашины, установленными за рабочими органами. При обработке регулируют глубину вспашки и нагрузку двигателя. Землю обрабатывают дисками, ромбиками, зубьями, предплужниками, плугами, заплужниками, крыльями. При обработке почвы снижают уплотнение, шаг и угол установки рабочих органов. Колеса переводят в режим рабочего органа и/или рабочий орган переводят в режим опоры. Рабочие органы могут быть выполнены в виде самоповоротных остроугольных реверсивных зубьев. Мощность двигателя агромашины делят между колесами и рабочими органами с возможностью переключения и поочередной работы, изменения числа и схемы соединения потребителей мощности для регулирования скорости движения. Агромашина может поворачиваться нулевым радиусом движущей силой одного колеса. При обработке формируют борозду, которую используют в качестве террасы или дорожки, канала на поливном поле, базовой линии для движения, причем камни и технологический сдвиг почвы используют для их строительства. Состояние поверхности земли изменяют путем регулирования скорости движения. При снижении скорости углубляют обработку, а при повышении скорости выглубляют рабочие органы и формируют борозды, каналы, террасы, дороги. Почву обрабатывают в режиме саморегулирования угла установки рабочего органа и нагрузки двигателя. Агромашина содержит двигатель для привода ходовой части и рабочих органов. Машина снабжена гидромашиной. На оси ведущего колеса смонтированы с возможностью перемещения механические рычаги с шарнирами секций, имеющих колеса, рабочие органы и фиксаторы настройки движения и положения рабочих органов и колес. Гидромашина имеет ротор, статор с линиями питания, утопители поршней-замыкателей рабочих полостей симметричного нагружения ротора с двух сторон при вращении и гидроподжиме поверхностей без мертвых зон. Ведущее колесо и колеса секций имеют гидромоторы, выполненные с возможностью их включения, отключения, последовательного или параллельного соединения для регулирования скорости движения. Рабочие органы выполнены в виде катков, дисков, зубьев, граблин, лопат, ромбиков и крыльев. Агромашина содержит рабочий орган в виде сегмента, смонтированного на оси самоповорота, и/или рабочие органы на двух осях самоустановки, или плуг реверсивного хода. Машина имеет оборотный рабочий орган с крыльями на рабочей поверхности или на тыльной стороне или диск на кривошипе для перестановки вправо и влево. Машина имеет рабочие органы-заменители колес и колеса-заменители рабочих органов. Двигатель и колеса выполнены из авиационного утиля. Ротор гидромашины установлен на эксцентриках для регулирования расхода жидкости без мертвых зон и распределителей. Такие технология и конструкция позволят повысить уровень механизации, энерго- и ресурсосбережения. 2 н. и 18 з.п. ф-лы, 15 ил.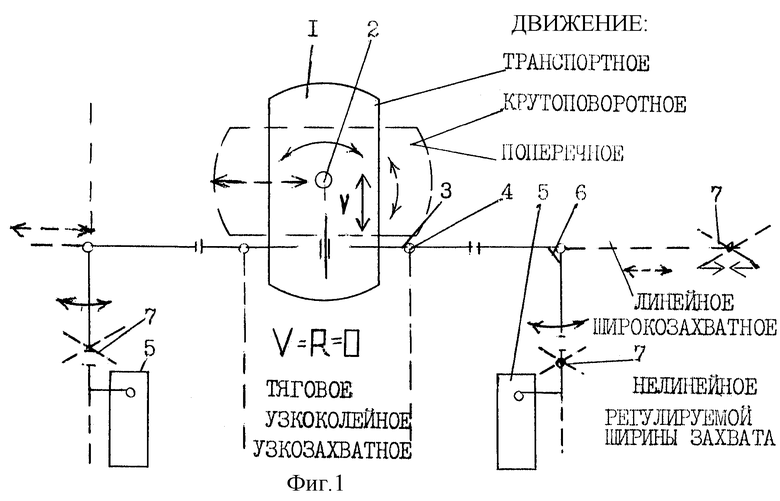
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1993 |
|
RU2106997C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗАМИ АГРЕГАТА | 1990 |
|
RU2036806C1 |
| RU 2000114266 А, 27.12.2002 | |||
| RU 99117125 А, 27.07.2001 | |||
| САМОХОДНАЯ МАШИНА ДЛЯ ПОВЕРХНОСТНОЙ ОБРАБОТКИ ПОЧВЫ | 1995 |
|
RU2108011C1 |
| ПОЧВООБРАБАТЫВАЮЩАЯ МАШИНА | 1990 |
|
RU2011323C1 |

