ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в своей основе относится к хирургическим инструментам и, в частности, к хирургическим инструментам для рассечения кости и другой ткани.
УРОВЕНЬ ТЕХНИКИ
Известны различные способы приведения в действие подвижных частей механизированных хирургических инструментов. Например, в механизированном хирургическом инструменте, который используют для рассечения кости или ткани, для приведения в действие анатомического инструмента может быть использован пневматический двигатель. Текучая среда под давлением приводит в действие двигатель, который может быть механически связан с анатомическим инструментом через вращающийся вал. Подача в двигатель текучей среды под давлением вызывает вращение вала, который, в свою очередь, вращает анатомический инструмент.
Трудности могут возникнуть при сборке и работе пневматических хирургических инструментов. В традиционных пневматических хирургических инструментах вращающийся вал размещен в камере, ограниченной корпусом ротора. Для обеспечения свободного вращения вала в камере корпуса ротора к корпусу ротора присоединены такие компоненты, как, например, подшипники, корпусы подшипника, распределители текучей среды и ряд других компонентов, известных из уровня техники. Для обеспечения правильного расположения этих компонентов при сборке может быть использован установочный штифт для совмещения компонентов с корпусом ротора и валом. Из-за увеличения количества компонентов, соединенных с корпусом ротора, и наличия допусков между компонентами и корпусом ротора повторяемость сборки хирургического инструмента затруднена.
Таким образом, существует необходимость в улучшенном приводном механизме для хирургического инструмента.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение обеспечивает различные технологические преимущества, которые могут быть использованы отдельно или в комбинации для обеспечения улучшенного приводного механизма для механизированного хирургического инструмента и/или улучшенную систему и способ использования механизированных хирургических инструментов.
В одном варианте выполнения корпус механизированного хирургического инструмента содержит выполненную как единое целое основу, камеру корпуса ротора, ограниченную основой, корпус первого подшипника, ограниченный основой и расположенный смежно с камерой корпуса ротора, корпус второго подшипника, ограниченный основой и расположенный на стороне камеры корпуса ротора, противоположной корпусу первого подшипника, и проход, ограниченный основой и действующий для направления текучей среды под давлением через основу в камеру корпуса ротора.
Другие формы и варианты выполнения станут очевидными из подробного описания, приведенного ниже. Следует понимать, что подробное описание и конкретные примеры с указанием предпочтительных вариантов выполнения приведены исключительно с целью иллюстрации и не накладывают никаких ограничений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение станет более понятным из подробного описания и сопровождающих чертежей, на которых:
Фиг.1 показывает общий вид, поясняющий вариант выполнения хирургического инструмента для рассечения кости и другой ткани согласно описаниям варианта выполнения настоящего раскрытия, оперативно связанного с пациентом для выполнения трепанации черепа.
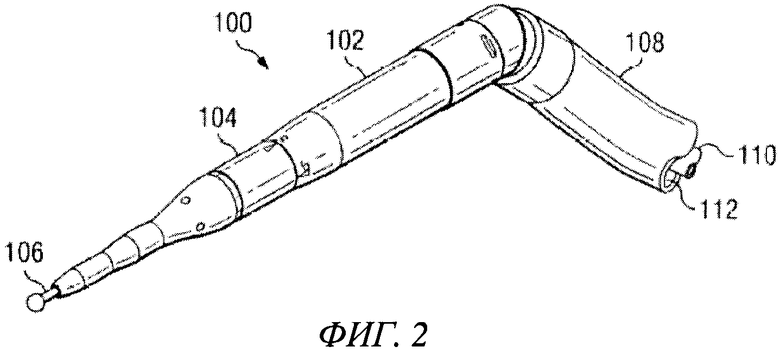
Фиг.2 показывает перспективный вид, поясняющий вариант выполнения хирургического инструмента для рассечения кости и другой ткани согласно описаниям варианта выполнения настоящего раскрытия, причем хирургический инструмент показан оперативно связанным с узлом шланга.
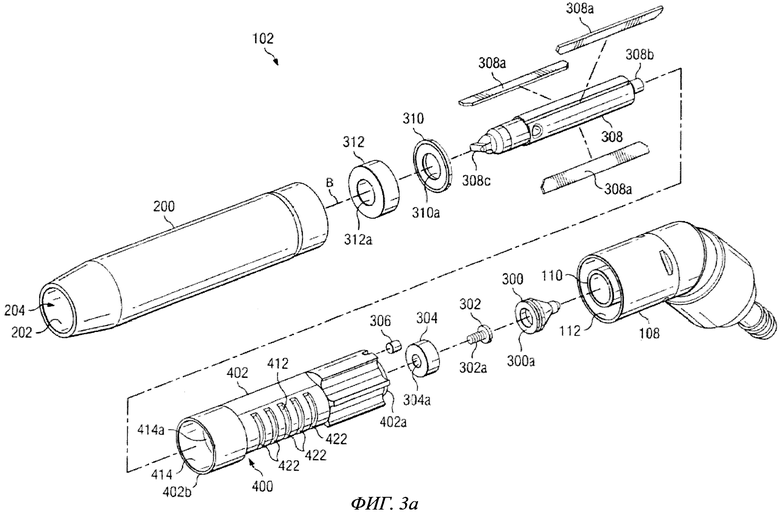
Фиг.3а показывает перспективный вид с пространственным разделением частей, поясняющий вариант выполнения части хирургического инструмента, показанного на фиг.2.
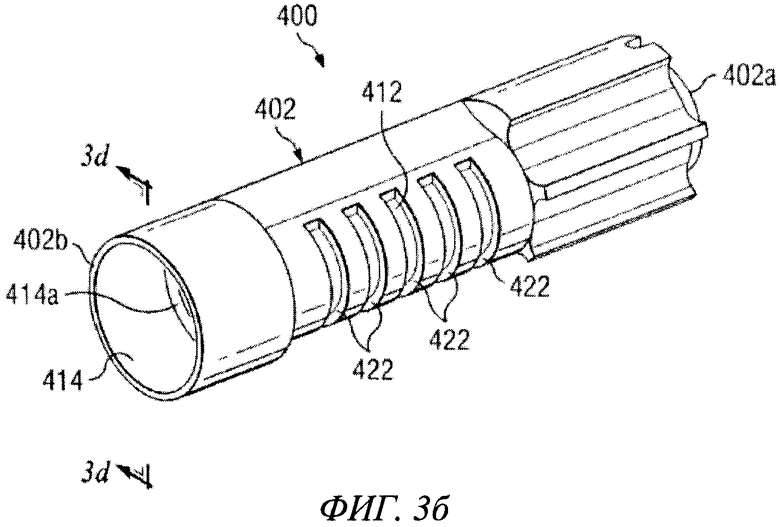
Фиг.3б показывает перспективный вид, поясняющий вариант выполнения корпуса, использованного в хирургическом инструменте, показанном на фиг.2 и поясненном на фиг.3а.
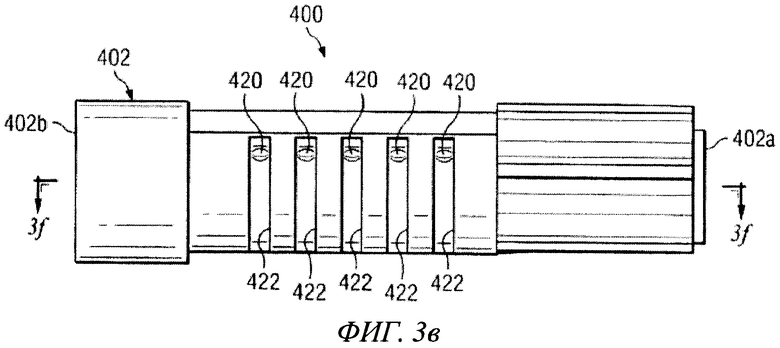
Фиг.3в показывает вид сбоку, поясняющий вариант выполнения корпуса, показанного на фиг.3б.
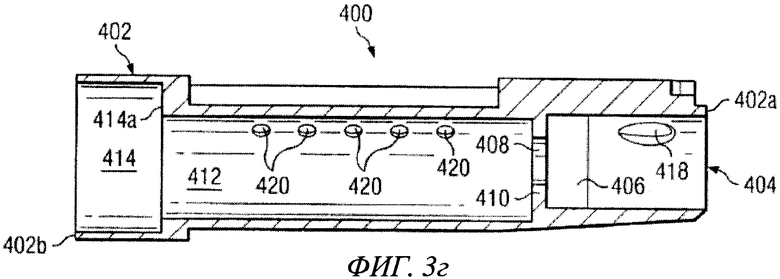
Фиг.3г показывает поперечное сечение, поясняющее вариант выполнения корпуса, показанного на фиг.3б, по линии 3d-3d на фиг.3б.
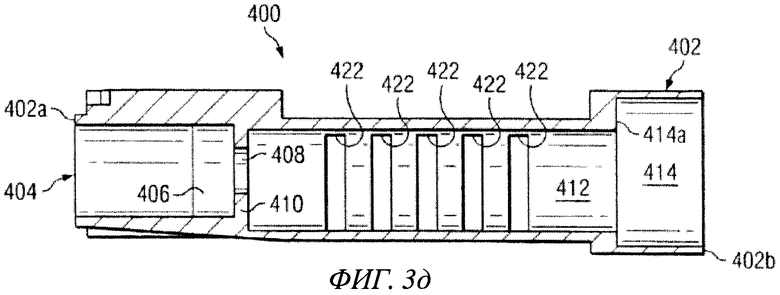
Фиг.3д показывает поперечное сечение, поясняющее вариант выполнения остальной части корпуса, показанной на фиг.3б и не показанной на фиг.3г.
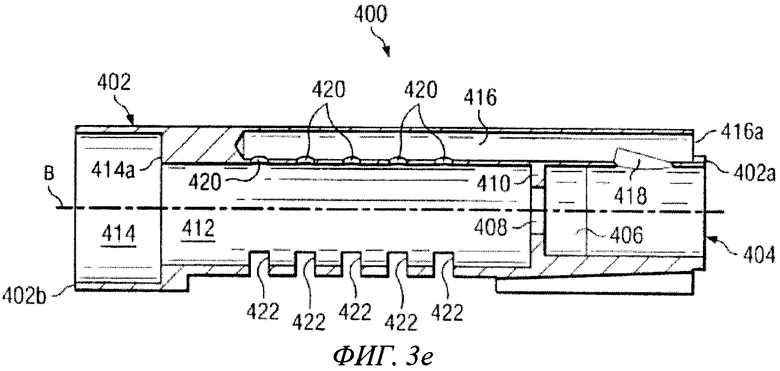
Фиг.3е показывает поперечное сечение, поясняющее вариант выполнения корпуса ротора, показанного на фиг.3б, по линии 3f-3f на фиг.3в.
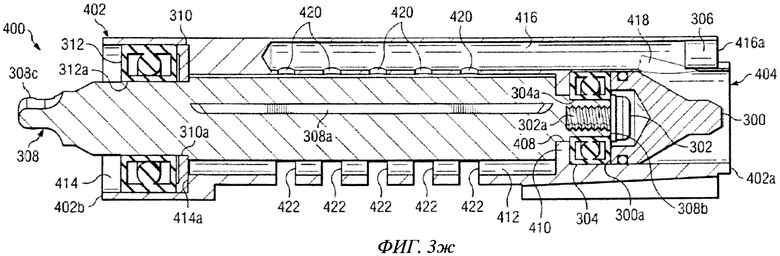
Фиг.3ж показывает частичное поперечное сечение, поясняющее вариант выполнения части собранного хирургического инструмента, показанного на фиг.3а.
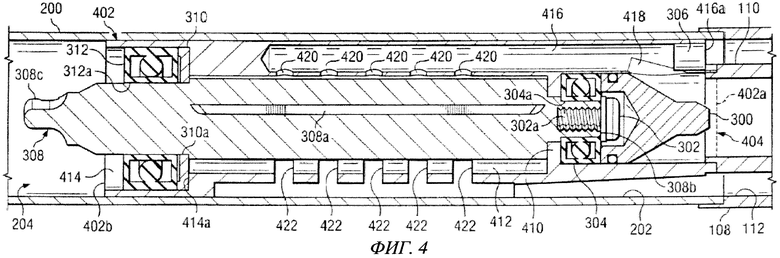
Фиг.4 показывает частичное поперечное сечение, поясняющее вариант выполнения части хирургического инструмента, показанного на фиг.2.
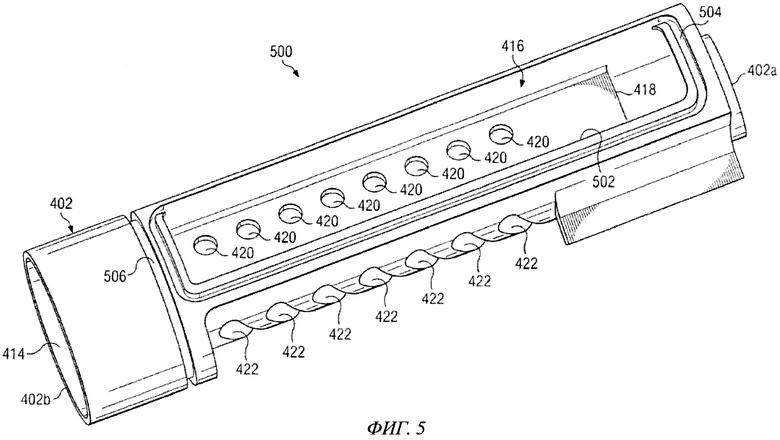
Фиг.5 показывает перспективный вид, поясняющий альтернативный вариант выполнения корпуса.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее раскрытие относится к хирургическим инструментам и более конкретно к корпусу и приводному механизму для использования в механизированных хирургических инструментах. Однако следует отметить, что настоящее раскрытие обеспечивает различные варианты выполнения или примеры осуществления различных отличительных особенностей настоящего изобретения. Конкретные примеры компонентов и конфигураций описаны ниже с целью упрощения настоящего раскрытия. Разумеется, они представляют собой только примеры и не содержат никаких ограничений. Кроме того, в настоящем раскрытии в различных примерах ссылочные номера и/или символы могут повторяться. Это повторение допущено с целью простоты и ясности и само по себе не задает какой-либо зависимости между различными вариантами выполнения и/или описанными конфигурациями.
Как показано на фиг.1, хирургический инструмент для рассечения кости и другой ткани, выполненный в соответствии с описанием первого предпочтительного варианта выполнения настоящего изобретения, пояснен и в общем обозначен ссылочным номером 100. Хирургический инструмент 100 показан в оперативной связи с пациентом А для выполнения трепанации черепа. Для специалистов в данной области техники очевидно, что использование настоящего изобретения не ограничено каким-либо конкретным случаем, но может быть использовано в различных случаях, в которых необходимо выполнение рассечений кости или другой ткани.
На фиг.2 показан хирургический инструмент 100, в общем содержащий приводной механизм 102, насадку 104, присоединенную к сборке 102, и хирургический инструмент 106, присоединенный к насадке 104 и приводному механизму 102. В предпочтительном варианте выполнения хирургический инструмент 106 представляет собой режущий инструмент или инструмент для рассечения, хотя тип инструмента не является существенным для осуществления настоящего изобретения. Дистальный конец инструмента 106 содержит элемент, приспособленный для конкретной процедуры, например режущий элемент. Насадка 104 может обеспечивать поверхность захвата для использования хирургом и также может закрывать основные части инструмента 100 во время хирургической процедуры.
Хирургический инструмент 100 показан соединенным с узлом 108, содержащим шланг с целью обеспечения источника текучей среды под давлением (например, воздух или азот) для приводного механизма 102 через трубку 110, и проход 112 в сборке 108 шланга для удаления воздуха после его прохода через приводной механизм 102. Как правило, узел 108 шланга соединен с фильтровальной системой (не показана), расположенной на некотором расстоянии от пациента, и выходящий воздух выходит наружу после прохода через фильтровальную систему. В примерных вариантах выполнения, которые будут описаны ниже, хирургический инструмент 100 приводят в действие пневматическим способом. Однако также подразумевается, что различные варианты, приведенные здесь, равно применимы в хирургических инструментах, использующих другие источники энергии.
На фиг.3а вариант выполнения приводного механизма 102, проиллюстрированного на фиг.2, показан подробно. Приводной механизм 102 содержит корпус 200 двигателя, имеющий внутреннюю поверхность 202, ограниченную в общем цилиндрической внутренней камерой 204. Корпус 200 может содержать, например, внутренние заплечики (не показаны), проходящие во внутреннюю камеру 204, и прокладки (не показаны) для создания уплотнения между корпусом 200 и другими компонентами приводного механизма 102, описанными подробнее ниже. Прокладки могут быть выполнены из материала, содержащего компаунд фторуглеродов PTFE, и других инертных компонентов, таких как продукт RULON-J. Этот материал обеспечивает герметизацию с относительно низким коэффициентом трения и при этом требует мало смазки или не требует смазки вовсе.
Приводной механизм 102 также содержит: крышку 300 подшипникового узла, имеющую поверхность 300a для взаимодействия с подшипником, крепежную деталь 302, имеющую крепежный элемент 302а, первый подшипник 304, имеющий отверстие 304a, заглушку 306, вращающийся вал 308, имеющий лопасти 308a, проходящие вдоль его длины, и пару противоположных концевых муфт 308b и 308с, опорный диск 310 подшипника, имеющий отверстие 310a, и второй подшипник 312, имеющий отверстие 312a, расположенные в корпусном элементе 400 и/или соединенные с ним, как описано более подробно ниже.
На фиг.3а, 3б, 3в, 3г, 3д и 3е показан корпусной элемент 400, содержащий удлиненную и в целом цилиндрическую, выполненную как единое целое основу 402, имеющую первый конец 402a и второй конец 402b, расположенный напротив первого конца 402a. В этом варианте выполнения корпусной элемент 400 представляет собой цельную часть, изготовленную из материала с различными отличительными особенностями, описанными ниже, присущими данному материалу. Хотя на чертеже корпусной элемент 400 показан сформированным из цельного однородного материала, следует понимать, что для формирования цельного корпусного элемента 400 могут быть использованы неоднородные материалы, такие как, например, подложка из некоторого материала, покрытая другим материалом. В этом варианте выполнения корпусной элемент 400 изготовлен из нержавеющей стали. В другом варианте выполнения корпусной элемент 400 может быть изготовлен из керамики и/или может иметь покрытие для придания корпусному элементу 400 большего сопротивления абразивному износу. В другом варианте выполнения корпусной элемент может быть выполнен посредством механической обработки. Отверстие 404 для сжатого воздуха ограничено основой 402 и проходит от первого конца 402a основы 402 вдоль продольной оси B основы 402 ко второму концу 402b основы 402. Корпус 406 первого подшипника ограничен основой 402 и расположен в непосредственной близости от отверстия 404 для сжатого воздуха. Соединительное отверстие 408 ограничено основой 402 и внутренним фланцем 410, который расположен в непосредственной близости от корпуса 406 первого подшипника. Камера 412 корпуса ротора ограничена основой 402 и расположена непосредственно смежно с внутренним фланцем 410 и отверстием 408 напротив корпуса 406 первого подшипника. Корпус 414 второго подшипника ограничен основой 402 и проходит между плоской стенкой 414a для взаимодействия с опорным диском, смежной с камерой 412 корпуса ротора, и вторым концом 402b основы 402. Канал 416 ограничен основой 402 и проходит по существу параллельно продольной оси B основы 402, но радиально раздельно от нее, от входа 416a канала таким способом, что канал 416 аксиально расположен смежно с отверстием 404 для сжатого воздуха, корпусом первого подшипника 406, внутренним фланцем 410 и частью камеры 412 корпуса ротора. Входное отверстие 418 канала ограничено основой 402, ориентировано под углом к каналу 416 и обеспечивает проход воздуха между отверстием 404 для сжатого воздуха и каналом 416. В этом варианте выполнения входное отверстие 418 канала ориентировано под углом 45 градусов к каналу 416. Входные отверстия 420 в корпусе ротора для сжатого воздуха ограничены основой 402 и обеспечивают проход воздуха между каналом 416 высокого давления и камерой 412 корпуса ротора. Выходные отверстия 422 корпуса ротора для сжатого воздуха ограничены основой 402 и обеспечивают проход воздуха между камерой 412 корпуса ротора и за пределы основы 402.
На фиг.3а и 3ж показана в сборе конструкция, в которой лопасти 308а присоединены к вращающемуся валу 308, расположенному в камере 412 корпуса ротора основы 402. Муфтовый конец 308b вращающегося вала 308 проходит через отверстие 408 в корпус 406 первого подшипника, и муфтовый конец 308 с вращающегося вала 308 проходит через корпус 414 второго подшипника и мимо второго конца 402b основы 402. Опорный диск 310 подшипника расположен в корпусе 414 второго подшипника и во взаимодействии со стенкой 414a таким способом, что вращающийся вал 308 проходит через отверстие 310a опорного диска подшипника ограниченный опорным диском 310 подшипника. Второй подшипник 312 расположен в корпусе 414 второго подшипника и находится во взаимодействии с опорным диском 310 подшипника таким способом, что вращающийся вал 308 проходит через отверстие 312a второго подшипника и поддержан с возможностью вращения вторым подшипником 312. В этом варианте выполнения второй подшипник 312 зафиксирован на месте фрикционным взаимодействием или посадкой с натягом с внутренней стенкой корпуса 414 подшипника. В альтернативном варианте выполнения для фиксации второго подшипника 312 на месте может быть использован клей.
Первый подшипник 304 расположен в корпусе 406 первого подшипника и находится во взаимодействии с внутренним фланцем 410 таким способом, что муфтовый конец 308b вращающегося вала 308 проходит в отверстие 304a первого подшипника и поддержан с возможностью вращения первым подшипником 304. Элемент 302а на крепежной детали 302 установлен во взаимодействии с муфтовым концом 308b на вращающемся валу 308, и соединительная деталь 302 установлена во взаимодействии с первым подшипником 304. Крышка 300 подшипникового узла расположена частично в корпусе 406 первого подшипника и в отверстии 404 для сжатого воздуха таким способом, что установочная поверхность 300a подшипника взаимодействует с первым подшипником 304. Заглушка 306 расположена в отверстии 416a канала таким способом, что сжатый воздух в канале 416 не может выйти из канала 416 через отверстие 416a канала. В описанном варианте выполнения отверстие 416a канала выполнено в результате изготовления канала 416 сверлением основы 402 со стороны первого конца 402а корпусного элемента 402. Затем заглушка 306 запрессована посадкой постоянно в отверстие 416a канала с целью предотвращения выходу сжатого воздуха из канала 416 через отверстие 416a канала. Однако альтернативные варианты выполнения могут использовать другие технологии изготовления канала 416, которые устраняют потребность в отверстии 416a канала и в заглушке 306, как, например, альтернативный вариант 500 выполнения, описанный ниже и проиллюстрированный на фиг.5. В другом варианте выполнения в корпусном элементе 400 могут быть обеспечены дополнительные уплотнения таким способом, что проход для сжатого воздуха обеспечен между корпусом 406 первого подшипника, камерой 412 корпуса ротора и корпусом 414 второго подшипника, и сжатый воздух, введенный в канал 416, проходит через входные отверстия 420 в корпусе ротора в камеру 412 корпуса ротора и из выходных отверстий 422 в корпусе ротора и не уходит через корпус 406 первого подшипника или корпус 414 второго подшипника.
Из фиг.3а и 3ж, а также из фиг.4 видно, что в собранном виде корпусной элемент 400, содержащий крышку 300 подшипникового узла, соединительную деталь 302, первый подшипник 304, заглушку 306, вращающийся вал 308, опорный диск 310 подшипника и второй подшипник 312, расположен во внутренней камере 204 в корпусе 200 двигателя. В описанном варианте выполнения взаимодействие между корпусным элементом 400 и корпусом 200 двигателя обеспечивает проход выпускного воздуха вокруг корпусного элемента 400 таким способом, что большая часть выпускного воздуха уходит в узел 108 шланга и через проход 112. В другом варианте выполнения взаимодействие между корпусным элементом 400 и корпусом 200 двигателя является герметичным. В другом варианте выполнения герметичность обеспечена между корпусным элементом 400 и корпусом 200 двигателя. Затем узел 108 шланга присоединяют к корпусу 200 двигателя таким способом, что трубка 110 присоединена к первому концу 402а корпусного элемента 402 и обеспечивает герметичный проход для сжатого воздуха между трубкой 110 и отверстием 404 для сжатого воздуха. Также обеспечено уплотнение между узлом 108 шланга и корпусом 200 двигателя. Муфтовый конец 308 с вращающегося вала 308 может быть соединен с хирургическим инструментом 106 (не показан) с использованием, например, цангового патрона.
Затем сжатый воздух под давлением от 0 до 150 фунт/кв. дюйм (1035 кПа) проходит в отверстие 404 для сжатого воздуха из трубки 110 в сборке 108 шланга. Управление хирургическим инструментом 100 осуществляют регулировкой давления сжатого воздуха в этих пределах. В описанном варианте выполнения давление сжатого воздуха на входе в приводной механизм равно 120 фунт/кв. дюйм (828 кПа). В другом варианте выполнения давление сжатого воздуха на входе в приводной механизм установлено в 100 фунт/кв. дюйм (690 кПа). В одном варианте выполнения потери давления сжатого воздуха на входе в приводной механизм могут лежать в пределах 10-30 фунт/кв. дюйм (69-207 кПа). Сжатый воздух проходит в канал 416 через входное отверстие 418 канала благодаря уплотнению между крышкой 300 подшипникового узла и первым подшипником 304 и уплотнению между заглушкой 306 и отверстием 416а канала. Сжатый воздух затем поступает в камеру 412 корпуса ротора через входные отверстия 420 для воздуха в корпусе ротора. По мере перемещения сжатого воздуха через камеру 412 корпуса ротора от входных отверстий 420 в корпусе ротора по направлению к выходным отверстиям 422 в корпусе ротора воздух действует на лопасти 308а и вызывает вращение вала 308. В одном варианте выполнения средняя ось вращения вала 308 может быть смещена от центральной линии камеры 412 корпуса ротора для создания увеличенного вращающего момента по сравнению с вариантом, в котором ось вращения вала 308 и центральная линия камеры 412 корпуса ротора коллинеарны. Затем сжатый воздух пониженного давления выходит из камеры 412 корпуса ротора через выходные отверстия 422 в корпусе ротора и проходит обратно через проход 112 выпускного воздуха в сборке 108 шланга между трубкой 110 и узлом 108 шланга. В одном варианте выполнения воздух теряет давление из-за расширения и обмена энергией, которое может быть равно, например, 20-30 фунт/кв. дюйм (138-207 кПа), если давление воздуха на входе в приводной механизм 102 составляет 120 фунт/кв. дюйм (828 кПа). Таким образом, согласно настоящему изобретению предложен хирургический инструмент, содержащий корпусной элемент, который обеспечивает упрощенную сборку приводного механизма по сравнению с традиционным корпусом ротора и уменьшает проходы, доступные для возможной утечки воздуха, при сокращении количества компонентов, использованных в приводном механизме. Хотя хирургический инструмент 100 был описан в варианте с пневматическим приводом, другие схемы привода, например гидравлический привод, также могут быть использованы.
На фиг.5 показан альтернативный вариант выполнения, в котором корпусной элемент 500 по конструкции и действию является по существу подобным корпусному элементу 400, описанному выше в связи с фиг.3а, 3б, 3в, 3г, 3д, 3е, 3ж и 4, с обеспечением отверстия 502, ограниченного основой 402 корпусного элемента 500 и расположенного смежно с каналом 416. Канавка 504 уплотнения ограничена основой 402 и расположена по периметру отверстия 502. Канавка 506 уплотнения ограничена основой 402 и расположена по периметру основы 402 и между отверстием 502 и вторым концом 402b основы 402. В собранном виде корпусной элемент 500 расположен во внутренней камере 204 корпуса 200 двигателя по существу тем же способом, как описано выше в отношении корпусного элемента 400, с созданием уплотнений (не показаны), расположенных в канавках 504 и 506 уплотнения таким способом, что уплотнения входят в герметичный контакт с внутренней поверхностью 202 корпуса 200 двигателя и обеспечивают герметизацию для воздуха между корпусным элементом 500 и корпусом 200 двигателя. При работе корпусной элемент 500 действует по существу так же, что и корпусной элемент 400, с герметичным уплотнением в пазах 504 и 506 уплотнения и направлением сжатого воздуха через канал 416 и входные отверстия 420 в корпусе ротора для сжатого воздуха. Отверстие 502 обеспечивает больший объем сжатого воздуха, проходящего через корпусной элемент 500 по сравнению с корпусным элементом 400, и уменьшает падение давления при проходе сжатого воздуха через канал 416 корпусного элемента 500 по сравнению с корпусным элементом 400. Кроме того, отверстие 502 обеспечивает изготовление канала 416 без необходимости формирования отверстия 416a канала и устраняет необходимость в заглушке 306.
Хотя настоящее изобретение, в частности, было показано и описано в отношении предпочтительного варианта его выполнения, специалисты в данной области техники должны подразумевать, что могут быть сделаны различные изменения в форме и деталях без отступления от идеи и объема настоящего изобретения. Кроме того, для достижения подобных результатов корпуса и/или компоненты могут быть замещены другими соответствующими элементами. Кроме того, для формирования различных компонентов могут быть использованы различные материалы, и относительные размеры компонентов также могут быть различными. Таким образом, пункты приложенной формулы должны интерпретироваться в широких пределах, совместимых с настоящим изобретением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппарат для изготовления мороженого | 2017 |
|
RU2746883C2 |
| СПОСОБЫ И СИСТЕМЫ, ПРИМЕНЯЕМЫЕ В ГЛАЗНОЙ ХИРУРГИИ | 2014 |
|
RU2634627C2 |
| ШАРОВОЙ КЛАПАН С ПЛАВАЮЩИМ МЕТАЛЛИЧЕСКИМ СЕДЛОМ И ВОЗМОЖНОСТЬЮ РЕМОНТА БЕЗ ДЕМОНТАЖА | 2012 |
|
RU2599690C2 |
| СИСТЕМЫ И СПОСОБЫ АСПИРАЦИИ С ТРУБКАМИ МАЛОГО ДИАМЕТРА | 2011 |
|
RU2586738C2 |
| КРУГОВОЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ДВИГАТЕЛЕМ, ВХОДНЫМ СИГНАЛОМ ВРАЩЕНИЯ И БЛОКИРУЕМЫМ ГИБКИМ СТВОЛОМ | 2013 |
|
RU2661719C2 |
| ШЕСТЕРЕНЧАТЫЙ НАСОС ДЛЯ ВПРЫСКА ДИЗЕЛЬНОГО ТОПЛИВА В ДВИГАТЕЛЕ | 2017 |
|
RU2745766C2 |
| ГЕНЕРИРУЮЩАЯ ЭЛЕКТРИЧЕСТВО СИСТЕМА С КОЛЬЦЕВОЙ КАМЕРОЙ СГОРАНИЯ | 1997 |
|
RU2243383C2 |
| ПЕРЕДНЯЯ ЧАСТЬ ДВИГАТЕЛЯ, СПОСОБ ДЛЯ ДВИГАТЕЛЯ И СИСТЕМА ДЛЯ ДВИГАТЕЛЯ | 2017 |
|
RU2738988C2 |
| ЗОНД ДЛЯ ВИТРЭКТОМИИ | 2018 |
|
RU2759047C2 |
| МАХОВИКОВАЯ СИСТЕМА НАКОПЛЕНИЯ ЭНЕРГИИ | 2002 |
|
RU2291541C2 |
Изобретение относится к медицинской технике и может быть использовано для рассечения кости и другой ткани. Хирургический инструмент содержит вращающийся вал, соединенный с инструментом рассечения, и корпусной элемент с основой, выполненной как единое целое. Камера корпуса ротора ограничена основой. Вращающийся вал расположен в камере корпуса ротора. Корпус первого подшипника ограничен основой, расположен смежно с камерой корпуса ротора и помещает в себе первый подшипник, который взаимодействует с вращающимся валом. Корпус второго подшипника ограничен основой, расположен на стороне камеры корпуса ротора, противоположной корпусу первого подшипника, и помещает в себе второй подшипник, который взаимодействует с вращающимся валом. Канал ограничен основой и действует с целью направления сжатого воздуха через основу в камеру корпуса ротора для вращения вращающегося вала. В результате приводной механизм для хирургического инструмента имеет улучшенную конструкцию. 3 н. и 17 з.п. ф-лы, 5 ил.
1. Корпусной элемент для механизированного хирургического инструмента, содержащий:
выполненную как единое целое основу, вытянутую вдоль продольной оси и содержащую множество поперечно расположенных стенок;
камеру корпуса ротора, ограниченную основой;
корпус первого подшипника, ограниченный основой и расположенный смежно с камерой корпуса ротора;
корпус второго подшипника, ограниченный основой и расположенный на стороне камеры корпуса ротора, противоположной корпусу первого подшипника; и канал, вытянутый вдоль продольной оси, ограниченный основой, расположенный вдоль боковой стенки корпуса первого подшипника и камерой корпуса ротора и выполненный с возможностью направления сжатого воздуха через основу в камеру корпуса ротора,
при этом указанная камера корпуса ротора и указанный корпус первого подшипника разделены по меньшей мере одной из указанного множества поперечно расположенных стенок указанной основы, выполненной как единое целое, и указанная камера корпуса ротора и указанный корпус второго подшипника разделены по меньшей мере одной из указанного множества поперечно расположенных стенок указанной основы, выполненной как единое целое.
2. Корпусной элемент по п.1, также содержащий:
входное отверстие для сжатого воздуха, ограниченное основой и расположенное на стороне корпуса первого подшипника, противоположной камере корпуса ротора.
3. Корпусной элемент по п.2, также содержащий:
отверстие в канале, ограниченное основой и расположенное между корпусом первого подшипника и входным отверстием для сжатого воздуха, в результате чего сжатый воздух, входящий во входное отверстие для сжатого воздуха, входит в канал через входное отверстие в канале.
4. Корпусной элемент по п.1, также содержащий:
входное отверстие для воздуха в корпуса ротора, ограниченное основой, в результате чего сжатый воздух в канале входит в камеру корпуса ротора через входное отверстие для воздуха в корпусе ротора.
5. Корпусной элемент по п.1, также содержащий:
выходное отверстие для воздуха в корпусе ротора, ограниченное основой, в результате чего воздух в камере корпуса ротора выходит из камеры корпуса ротора через выходное отверстие для воздуха в корпусе ротора.
6. Корпусной элемент по п.1, также содержащий:
отверстие канала, ограниченное основой, для приема заглушки.
7. Приводной механизм механизированного хирургического инструмента, содержащий:
выполненную как единое целое основу, вытянутую вдоль продольной оси и содержащую по крайней мере одну поперечную стенку, расположенную, по существу, перпендикулярно продольной оси;
камеру корпуса ротора, ограниченную основой;
корпус первого подшипника, ограниченный основой и расположенный смежно с камерой корпуса ротора;
канал, вытянутый вдоль продольной оси, ограниченный основой и действующий с целью направления сжатого воздуха через основу в камеру корпуса ротора,
при этом указанная камера корпуса ротора и указанный корпус первого подшипника разделены по меньшей мере одной поперечно расположенной стенкой указанной, выполненной как единое целое, основы;
первый подшипник, расположенный в корпусе первого подшипника; и вращающийся вал, расположенный в камере корпуса ротора и взаимодействующий с первым подшипником.
8. Приводной механизм по п.7, также содержащий:
корпус второго подшипника, ограниченный основой и расположенный на стороне камеры корпуса ротора, противоположной корпусу первого подшипника; и второй подшипник, расположенный в корпусе второго подшипника, причем вращающийся вал взаимодействует со вторым подшипником.
9. Приводной механизм по п.8, также содержащий:
опорный диск подшипника, расположенный в корпусе второго подшипника и смежный со вторым подшипником.
10. Приводной механизм по п.7, также содержащий:
крепежную деталь, расположенную по меньшей мере частично в корпусе первого подшипника и взаимодействующую с первым подшипником и вращающимся валом.
11. Приводной механизм по п.7, также содержащий:
крышку подшипникового узла, расположенную по меньшей мере частично в корпусе первого подшипника и взаимодействующую с первым подшипником.
12. Приводной механизм по п.7, также содержащий:
входное отверстие для сжатого воздуха, ограниченное основой и расположенное на стороне корпуса первого подшипника, противоположной камере корпуса ротора.
13. Приводной механизм по п.12, также содержащий:
отверстие в канале, ограниченное основой и расположенное между корпусом первого подшипника и входным отверстием для сжатого воздуха, в результате чего сжатый воздух, входящий во входное отверстие для сжатого воздуха, входит в канал через отверстие в канале.
14. Приводной механизм по п.7, также содержащий:
входное отверстие для воздуха в корпусе ротора, ограниченное основой, в результате чего, сжатый воздух в канале входит в камеру корпуса ротора через входное отверстие для воздуха в корпусе ротора и входит в взаимодействие с вращающимся валом.
15. Приводной механизм по п.7, также содержащий:
выходное отверстие для воздуха в корпусе ротора, ограниченное основой, в результате чего воздух в камере корпуса ротора выходит из камеры корпуса ротора через выходное отверстие для воздуха в корпусе ротора.
16. Приводной механизм по п.7, также содержащий:
отверстие в канале, ограниченное основой и выполненное с возможностью приема заглушки.
17. Способ приведения в действие хирургического инструмента, содержащий этапы, на которых:
обеспечивают приводной механизм для хирургического инструмента, содержащий:
выполненную как единое целое основу, вытянутую вдоль продольной оси и содержащую по крайней мере одну поперечную стенку, расположенную, по существу, перпендикулярно продольной оси, ограничивающую камеру корпуса ротора,
корпус первого подшипника, смежный с камерой корпуса ротора, и
канал, вытянутый вдоль продольной оси, соединенный с камерой корпуса ротора, при этом указанная камера корпуса ротора и указанный корпус первого подшипника разделены по меньшей мере одной поперечно расположенной стенкой указанной, выполненной как единое целое, основы, хирургический инструмент, также содержащий вращающийся вал, расположенный в камере корпуса ротора и взаимодействующий с первым подшипником, расположенным в корпусе первого подшипника;
соединяют источник сжатого воздуха с основой; и
подают сжатый воздух от источника сжатого воздуха через канал для вращения вращающегося вала в камере корпуса ротора.
18. Способ по п.17, при котором монолитная основа ограничивает корпус второго подшипника, расположенный в камере корпуса ротора напротив корпуса первого подшипника, в силу чего второй подшипник расположен в корпусе второго подшипника и взаимодействует с вращающимся валом.
19. Способ по п.17, также содержащий этапы, на которых:
обеспечивают, по существу, герметичное уплотнение между камерой корпуса ротора и корпусом первого подшипника; и обеспечивают, по существу, герметичное уплотнение между камерой корпуса ротора и корпусом второго подшипника.
20. Способ по п.17, при котором этап подачи сжатого воздуха высокого давления из источника сжатого воздуха через канал содержит этап, на котором сжатый воздух высокого давления направляют через входное отверстие для сжатого воздуха, ориентированное под углом к каналу.
| Механизированный инструмент для разрезания костных тканей | 1989 |
|
SU1718849A1 |
| Устройство для клеймения деталей | 1985 |
|
SU1260190A1 |
| НАКОНЕЧНИК СТОМАТОЛОГИЧЕСКИЙ УГЛОВОЙ | 1986 |
|
RU1474904C |
| US 5425638 A, 20.06.1995 | |||
| US 6273718 B1, 14.08.2001 | |||
| Наконечник для бормашины | 1989 |
|
SU1734720A1 |

