Данное изобретение относится к интерактивной беспроводной игрушке.
УРОВЕНЬ ТЕХНИКИ
Около десяти лет назад на рынке начали массово появляться говорящие игрушки, способные произносить несколько записанных фраз.
Сейчас идет бурное развитие возможностей такого рода игрушек. При помощи датчиков они получают информацию о событиях, реагируют на них, по возможности, адекватно.
В настоящее время наблюдаются следующие тенденции в развитии игрушек:
- игрушки будут обладать несколькими исполнительными устройствами, способными создать тот или иной эффект, включая, но не ограничиваясь воспроизведением речи, музыки, движениями (и мимикой), световыми эффектами, перемещением,
- датчики будут снабжать игрушки более разнообразной информацией о событиях вокруг и игрушки смогут реагировать на события, такие как прикосновение к ним, приближение к ним, на изменение освещенности, на звуки, включая распознавания звуков и речи, узнавания людей по голосу,
- игрушки будут способны «узнавать друг друга» при помощи беспроводных каналов передачи,
- игрушки будут способны информировать друг друга об обнаруженных событиях, о произведенных эффектах, то есть первая игрушка будет знать, что сделала или сказала вторая, не восприняв это действие, а получив информацию о нем, переданную второй по беспроводному каналу,
- игрушки будут способны определять свое местоположение друг относительно друга, на игровом поле, а также в комнате.
Эти тенденции можно обнаружить, изучая представленные на рынке игрушки, такие как, например, знаменитые интерактивные зверушки «Ферби» («Furby»), впервые выпущенные еще в 1998 г., или наследующие им куклы типа «Amazing Amanda» (в российской версии - «Умница Анюта»). Основным назначением игрушек этого класса является эмоционально-вербальная коммуникация с ребенком, для чего они снабжены как рецепторами (микрофон, датчики касания, наклона и др.), так и периферийными устройствами (прежде всего, мимическая механика и звуковоспроизводящая система). Хотя все реакции этих игрушек предварительно запрограммированы (pre-programmed), они уже достаточно разнообразны. Так, «Умница Анюта» имеет в своем речевом арсенале около 700 фраз. Встроенная система распознавания речи позволяет идентифицировать хозяина и определять команды (из предустановленного набора). Кроме того, подобные игрушки могут обмениваться информацией между собой (как правило, через ИК-порт) и обновлять сценарий через Интернет. Например, робот-динозавр «Плео» («Pleo») может изменить характер поведения с любвеобильного на агрессивный (сторожевой) в соответствии с переустанавливаемой программой, которую можно взять с сайта производителя. Ряд игрушек распознают и обходят препятствия или пустоты («Плео», игрушечный робот-андроид «WooWee» и др.) Однако формирование подлинных коммуникационных сетей из произвольного набора интерактивных игрушек еще не выполнено на практике. Реализация предлагаемого изобретения дает эффективное решение в этом направлении.
Эти же тенденции проявляются в патентах, таких как, например: US 6,491,566; US 6,729,934; US 6,089,942; US 6,110,000.
В частности, в патенте US 6,089,942 описана говорящая кукла, имеющая датчик движения, датчик приближения одной куклы к другой, инфракрасный приемопередатчик для обмена информацией между куклами. Кукла имеет также периферийные устройства, такие как динамик для воспроизведения звуков и электромеханические устройства для имитации мимики.
Кукла, произнося фразу (или производя другой эффект), передает информацию об этом другим куклам, другие куклы, получив эту информацию, могут отреагировать на фразу или эффект своим действием в соответствии со сценарием.
Однако не найдено решений по использованию несинусоидальных сигналов в одном устройстве развлекательного назначения для трех задач одновременно: связи, обнаружения движения, измерения расстояния.
Вероятно, это связано со сложностью реализации сверхширокополосных (СШП) систем, использующих несинусоидальные сигналы, и, в частности, сложности начальной синхронизации между СШП устройствами, необходимой для передачи данных.
Например, патент RU 2315425 посвящен вопросу установления синхронизации в подобных системах.
Однако заявленную в настоящем документе область применения - интерактивные игрушки - характеризуют малые расстояния связи (менее метра) и таким образом возможно обеспечение высокого отношения сигнал/шум, при котором можно использовать исключительно простые методы обработки сигнала и таким образом сделать простое решение (а, значит, с более низкой стоимостью).
Техническое решение, раскрытое в патенте US 6,089,942, взято в качестве прототипа.
Заявленное изобретение направлено на решение задачи по созданию интерактивной игрушки, способной обмениваться информацией, определять расстояние до другой однотипной, себе подобной игрушки, с точностью в несколько сантиметров и детектировать движение в ближайшем радиусе 0,3-1,0 м.
Достигаемый технический результат состоит в упрощении конструкции интерактивной игрушки при повышении эффективности ее работы и повышении помехозащищенности, а также снижении себестоимости.
Технический результат достигается тем, что интерактивная беспроводная игрушка, содержащая электронный блок управления, выполненный с возможностью
- определения движения на заданном расстоянии от указанной игрушки;
- определения расстояния до другой подобной игрушки;
- приема и передачи информации,
реализует указанные возможности за счет использования приемопередатчика несинусоидальных сверхширокополосных радиосигналов. Кроме того, указанный приемопередатчик может использовать один генератор импульсов и одну антенну. Одни и те же импульсы могут использоваться для передачи информации и для обнаружения движения на принципах радиолокации. Указанный приемопередатчик может быть реализован на одном полупроводниковом кристалле с использованием фазированной антенной решетки для определения направления на другую подобную игрушку и/или направления на произвольный движущийся объект в зоне действия радара. Кроме того, электронный блок управления может быть выполнен с возможностью менять функциональное состояние и/или алгоритмический сценарий поведения игрушки в зависимости от измеренного расстояния до другой подобной игрушки и/или полученной от другой игрушки информации.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Предлагаемое техническое решение состоит в применении радиоэлектронной схемы, использующей несинусоидальные сверхширокополосные радиосигналы для реализации функций:
- обмена информации между устройствами, т.е. радиосвязи,
- измерения расстояния между устройствами,
- обнаружения движения на заданном расстоянии от устройства (вблизи).
Такое решение позволило совместить несколько отдельных устройств в одном для выполнения всех указанных функций. Для реализации всех трех функций используют предпочтительно короткие импульсы длительностью не более 1 нс. Изобретение ориентировано на однокристальное исполнение по современным технологиям, используемым для производства массовой микроэлектроники.
ОПИСАНИЕ ГРАФИЧЕСКОГО МАТЕРИАЛА.
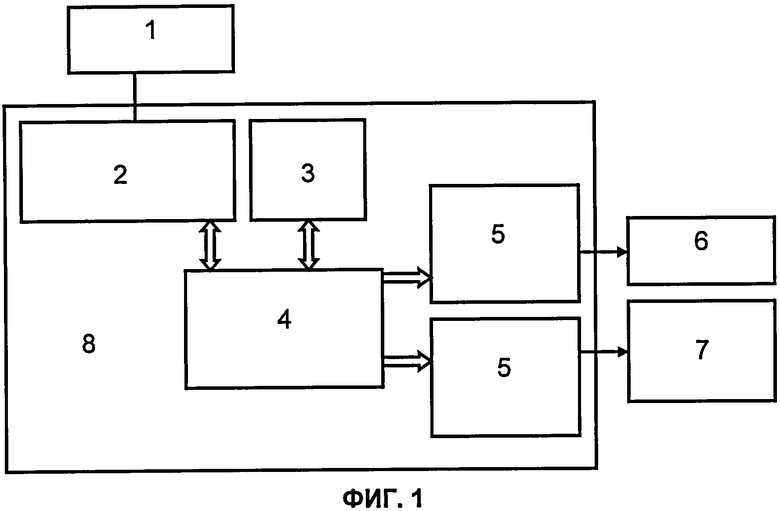
На фиг.1 показана общая схема, состав устройств интерактивной игрушки.
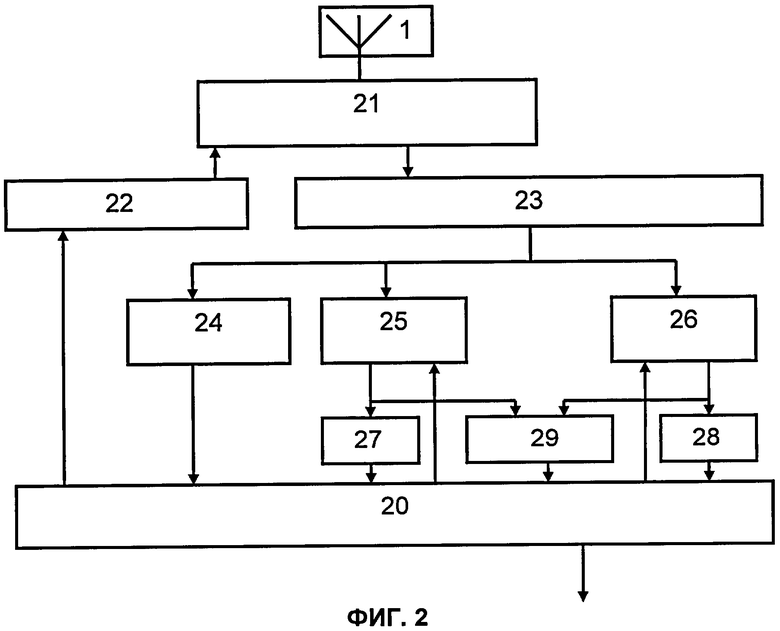
На фиг.2 показана схема приемопередатчика радиосигнала.
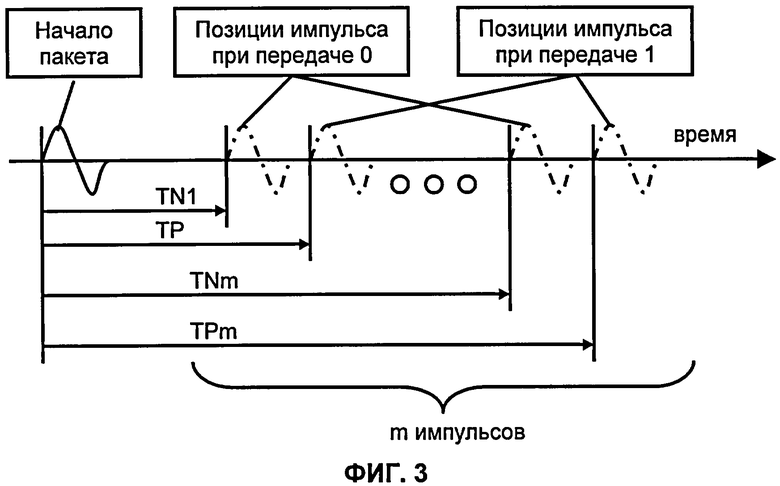
На фиг.3 показана схема передачи данных.
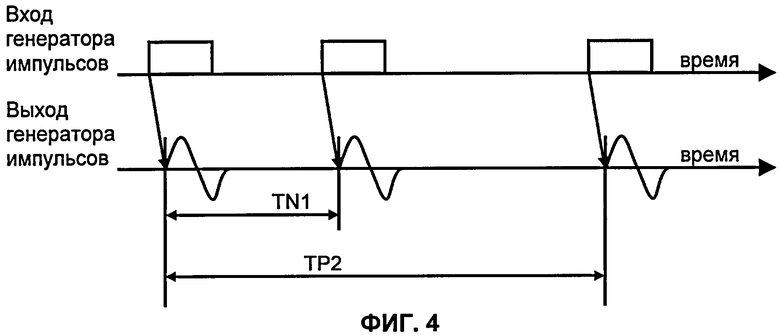
На фиг.4 показана схема передачи пакета, у которого первый бит - 0, второй - 1, далее не показано.
ДЕТАЛЬНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Особенностью сверхширокополосной (СШП) локации является использование коротких импульсных сигналов с характерной длительностью импульса 1 нс и менее. Сигнал может представлять собой импульс без заполнения несущей вообще (видеоимпульс) или очень короткий цуг несущий, содержащий в себе несколько «периодов». Такие сигналы имеют очень широкий спектр, соизмеримый по порядку величины с несущей. Например, регулирующей орган США разрешает для гражданского применения системы со спектром излучения 3 ГГц-10 ГГц.
Основные преимущества решения связаны с малой длиной импульса. При распространении в пространстве импульс длиной 100 пс имеет длину 3 см, что обеспечивает высокое пространственное разрешение. Становится возможным различить сигналы, приходящие от объектов, если разница расстояния до них составляет порядка десяти сантиметров; благодаря короткой длине импульса практически отсутствует «мертвая зона» около устройства.
Одним из преимуществ СШП связи на основе импульсных сигналов является возможность точного измерения расстояния между абонентами. Достигнутая на сегодняшний день точность определения расстояния составляет несколько сантиметров.
Для реализации функции связи информацию кодируют положением импульса во времени. Краткость импульса обеспечивает высокую скорость передачи, что уменьшает время передачи информации по сравнению с использованием традиционных узкополосных систем. Это, в свою очередь, позволяет за более короткое время провести цикл обмена данными между всеми устройствами в сети (в зоне доступа).
Применение коротких сигналов позволяет использовать известный метод измерения расстояния между парой обменивающихся сигналами устройств, основанный на измерении задержки на прохождение сигнала между устройствами.
Предлагаемый принцип обеспечивает именно измерение расстояния, в отличие от упомянутого в US 6,089,942 порогового датчика. При наличии группы устройств (3 и более), зная расстояние между каждой парой устройств, становится возможным определить относительную пространственную конфигурацию сообщества устройств. Возможны другие сценарии взаимодействия устройств, использующие данную информацию.
Для обнаружения движения применяется принцип радара. Для локации используют такие же короткие импульсные сигналы, как и для передачи данных. Устройство фиксирует импульс (интегрирует электромагнитную энергию), отразившийся от объекта, пришедший на приемник в течение некоторого интервала времени после излучения импульса. Выбирая интервал времени после импульса, в течение которого производят фиксацию импульса (интеграция электромагнитной энергии), выбирают область пространства, в которой производят обнаружение движения. Появление в заданной области отражающего предмета приводит к изменению результата фиксации импульса (интегрирования электромагнитной энергии), это обнаруживается устройством. С целью улучшения чувствительности и помехоустойчивости производят фиксацию (накопление энергии) отраженного сигнала от нескольких импульсов.
В заявляемом техническом решении за счет того, что приемопередатчик использует одну антенну, все три функции реализуются с использованием одной антенны, что упрощает конструкцию игрушки, повышает технологичность изготовления, снижает его стоимость.
Максимальную длину импульса вычисляют исходя из: допустимой мертвой зоны радара, требований по точности измерения расстояния между устройствами и точности определения области пространства, в которой требуется обнаруживать движения. В указанных применениях все эти точности составляют порядка десятков сантиметров, а следовательно, длина импульса должна быть порядка не более 1 нс.
При классическом подходе данный импульс должен быть заполнен несущей частотой и должен содержать по меньшей мере десятки периодов несущей. Это приводит к необходимости использования рабочих частот порядка десятков гигагерц. В ближайшей перспективе схема, использующая такие частоты, не может быть дешевой и массовой. В дальнейшей перспективе технологические процессы, позволяющие создавать микроэлектронные решения, работающие на указанных частотах, могут стать дешевыми, но останется проблема высокого энергопотребления. Высокочастотные схемы принципиально имеют высокое энергопотребление, определяемое необходимостью перезарядки паразитных емкостей.
В предлагаемом устройстве используются несинусоидальные сверхширокополосные сигналы. Сигнал может представлять собой импульс без заполнения несущей вообще (видеоимпульс) или очень короткий цуг несущий, содержащий в себе несколько «периодов». Следует отметить, что чистый видеоимпульс с ненулевой постоянной не может быть излучен. Практически применяемыми наиболее короткими излучаемыми сигналами являются сигналы, по форме близкие к первой или второй (так называемая «мексиканская шляпа») производной от Гауссовского сигнала. Первая производная Гауссиана для практических расчетов может быть хорошо аппроксимирована одним периодом синусоиды. В этом случае центральная частота спектра близка к частоте периода, а ширина полосы близка к центральной частоте.
Общая схема предлагаемой интерактивной игрушки в целом приведена на фиг.1.
Интерактивная игрушка состоит из интегральной схемы 8, одного или нескольких датчиков (на рисунке не показаны), одного или нескольких периферийных устройств 6, 7 (например, электроприводов, динамиков), антенны 1 и источника автономного питания (на рисунке не показан).
Интегральная схема 8 содержит следующие элементы: приемопередатчик 2, микрокомпьютер 4, запоминающее устройство 3 для хранения программ и служебных файлов данных (например, звука), один или несколько блоков 5 для управления периферийными устройствами 6, 7 и получения информации от датчиков. В предлагаемом устройстве приемопередатчик 2 выполняет функции, обычно выполняемые датчиком движения, датчиком, измеряющим расстояние между устройствами, инфракрасного (или радиочастотного) приемопередатчика. Данный приемопередатчик в отличие от приемопередатчиков, использующих синусоидальные сигналы, не содержит LC контуры, усложняющие конструкцию устройства и его производство. Под управлением микрокомпьютера 4 приемопередатчик радиосигнала 2 реализует функции передачи и приема данных, измерения расстояния между устройствами, обнаружения движения.
Приемопередатчик 2 содержит цифровую схему управления (ЦСУ) 20, аналого-цифровые преобразователи 27, 28, компаратор 29, устройства выборки хранения (УВХ) УВХ0 25 и УВХ1 26, пороговый детектор 24, генератор импульса 22, детектор огибающей 23, коммутатор 21 с выходом на антенну 1. Антенна может быть выполнена в виде фазированной антенной решетки /1-7/ для определения направления на другую игрушку при связи и определения направления на движущийся объект в датчике движения.
Описание работы устройства (фиг.3, фиг.4).
Один из возможных вариантов заявляемого устройства приведен на фиг.2.
Приемопередатчик 2 радиосигнала выполняет следующие функции:
- отправки пакета в эфир по команде от микрокомпьютера,
- прием пакета из эфира,
- автоматическая отправка подтверждения о принятом пакете,
- подтверждение микрокомпьютеру о том, что последний переданный пакет успешно доставлен,
- измерения отраженного сигнала при отправке пакета в эфир.
На основе данных функций приемопередатчика 2 устройство в целом способно выполнять следующие функции:
- радиосвязь с аналогичными устройствами;
- измерение расстояния до однотипных устройств, с которыми обеспечивается радиосвязь;
- обнаружение движения на заданном расстоянии от игрушки.
Радиосвязь. Для реализации функции связи информацию кодируют положением импульса во времени. Краткость импульса обеспечивает высокую скорость передачи, что уменьшает время передачи информации по сравнению с использованием традиционных узкополосных систем. Это, в свою очередь, позволяет за более короткое время провести цикл обмена данными между всеми устройствами в сети (в зоне доступа).
Применение коротких сигналов позволяет использовать известный метод измерения расстояния между парой обменивающихся сигналами устройств, основанный на измерении задержки на прохождение сигнала по среде между устройствами. Радиосвязь реализуют при помощи функций приемопередатчика - передача пакета и прием пакета.
Передача пакета. Передачу данных осуществляют пачками импульсов (фиг.4).
Один или несколько первых импульсов идентифицируют начало пакета. Последующие (m) импульсов используют для передачи информации. Информацию кодируют положением импульсов во времени относительно первого импульса. Для каждого импульса определено две позиции во времени, одна с задержкой TNi (i=1..m) относительно первого импульса соответствует передачи нуля, другая с задержкой TPi (i=1..m) относительно первого импульса соответствует передаче единицы. Таким образом, в одном пакете передается m бит информации. Для обеспечения устойчивости к помехам обычно используют одну из известных на современном уровне науки техники схему избыточного кодирования, при которой часть из этих m бит содержит полезную информацию, а оставшиеся биты содержат избыточную информацию, необходимую для обнаружения исправления ошибок. Полезная информация содержит, по крайней мере, тип пакета, сетевой адрес получателя и собственно данные. В предлагаемом варианте устройства есть два типа пакета: «информационный» и «подтверждающий». Конкретная структура пакета может быть выработана исходя из требований к функционированию устройства.
ЦСУ 20, получая данные для передачи, формирует логический сигнал на входе генератора импульсов. Генератор импульсов по фронту логического сигнала выдает в антенну 1 импульс. Генератор устроен таким образом, что задержка выдаваемого в антенну 1 импульса относительно фронта входного цифрового сигнала почти постоянна от импульса к импульсу (изменения много меньше длины импульса). В результате в эфир излучают пакет импульсов с интервалами между импульсами, равными соответствующим интервалам логического сигнала. ЦСУ 20 при передаче пакета формирует логический сигнал на входе генератора импульсов, задающий положения импульсов пакета, соответствующие последовательности бит передаваемого пакета, и таким образом осуществляет передачу информации в эфир.
При этом TPi=TNi+TD, то есть для любого импульса позиция импульса при передаче нуля на величину TD раньше позиции импульса при передачи единицы. Величину TD назначают, как минимум, в два раза больше длины импульса и в несколько раз меньше интервала между импульсами.
Известно, что если использовать линейный набор TNi, то есть TNi=C1+C2*i, то в спектре излученного сигнала могут появиться нежелательные максимумы, связанные с наличием в сигнале периода С2. Чтобы избежать этого, величины TNi подбирают таким образом, чтобы при любом передаваемом пакете спектр не имел таких максимумов.
В предлагаемом варианте устройства передачу информационных пакетов выполняют по команде микрокомпьютера, при этом микрокомпьютер компонует полезную информацию для отправки в пакете.
Прием пакета (фиг.2, фиг.3). Антенна 1 принимает импульс и направляет на детектор огибающей 23, выход которого выдает огибающую приходящего сигнала. Огибающая поступает на пороговый детектор 23, который выдает единицу, если огибающая больше порога, и соответственно ноль, если огибающая меньше порога.
При появлении единицы на выходе порогового устройство начинает прием пакета. Для этого на вход строба УВХ0 25 подают цифровой сигнал, содержащий n импульсов (где n - это количество импульсов в пакете, использующихся для передачи информации), положительный фронт импульса i (i=1..m) генерируют с задержкой TNi+TC относительно момента, когда выход порогового устройства перешел в состояние 1.
На вход строба УВХ1 26 подают цифровой сигнал, содержащий n импульсов (где n - это количество импульсов в пакете, используемых для передачи информации), положительный фронт импульса i (i=1..m) генерируют с задержкой TPi+TC относительно момента, когда выход порогового устройства перешел в состояние 1.
Таким образом оба УВХ переходят в режим хранения и запоминают значение огибающей, при этом УВХ0 25 переходит в режим хранения и запоминает значение огибающей в момент, когда ожидают появление импульса, если импульс i передает ноль, а УВХ1 26 25 переходит в режим хранения и запоминает значение огибающей в момент, когда ожидают появление импульса, если импульс i передает единицу. Поле того как оба УВХ перешли в режим «хранение», компаратор 29 осуществляет сравнение значений на выходе УВХ0 25 и УВХ1 26 и, если значение УВХ0 25 больше значения УВХ1 26, то считают, что импульсом i передавался ноль, соответственно если УВХ1 26 больше значения УВХ0 25, то считают, что импульсом i передавалась единица. После приема всех m импульсов производят декодирование помехоустойчивого кода. В результате либо восстанавливают полезную информацию, либо пакет отбраковывают (если не удается восстановить).
Автоматическая отправка подтверждения о принятом пакете. Цифровая схема управления (ЦСУ) 20 после успешного декодирования принятого пакета информационного типа может отправить подтверждение отправителю об успешном приеме. Цифровая схема управления самостоятельно формирует пакет, адресованный отправителю принятого пакета, данный пакет имеет тип «подтверждающий». Это позволяет отправителю узнать, что его пакет успешно доставлен. Подтверждение также используют для измерения расстояния между однотипными устройствами. В некоторых случаях микрокомпьютер может запретить отправку подтверждений.
Измерение расстояния до однотипных устройств. Для измерения расстояния используют функцию автоматической отправки подтверждения. От устройства А к устройству Б отправляют информационный пакет. Устройство Б автоматически посылает подтверждение устройству А о полученном пакете. При этом первый импульс подтверждающего пакета от устройства Б отправляют через заранее назначенный фиксированный временной интервал ТВ после получения первого импульса информационного пакета от А. Устройство А измеряет время от отправки первого импульса информационного пакета к Б до получения первого импульса подтверждающего пакета от Б, это время обозначено как TS, тогда расстояние между устройствами L равно (TS-TB)/2.
Указанную процедуру выполняют при отправке всех информационных пакетов. Таким образом, определяют расстояние до всех однотипных устройств, которым передавались информационные пакеты. При интенсивном обмене информацией между устройствами нет необходимости посылки специальных пакетов для измерения расстояния. Однако если какому-то устройству не посылались информационные пакеты или данные о расстоянии устарели, микрокомпьютер может дать команду отправить этому устройству информационный пакет и таким образом измерить расстояние.
Обнаружение движения на заданном расстоянии от устройства.
Приемопередатчик радиосигнала использует принцип радара для реализации функции обнаружения движения. Устройство обнаруживает движение в сфере, окружающей устройство. Радиус сферы R настраивают микрокомпьютером. Предпочтительная величина радиуса обычно в интервале от 1 м до 30 см.
При передаче пакета приемный тракт, включающий детектор огибающей 23, устройство выборки хранения 25, 26 и др., используют для приема отраженного сигнала.
Цифровая схема управления 20 после каждого переданного импульса с определенной задержкой подает стробирующий импульс на УВХ0 25. Данная задержка зависит от выбранного радиуса сферы R, на котором обнаруживают движение, и (приблизительно) равна удвоенному времени распространения радиосигнала до сферы.
Записанное по стробу в УВХ значение характеризует мощность отраженного сигнала, приходящего с заданного расстояния. Данное значение АЦП0 21 преобразует в цифровой вид и передает в микрокомпьютер для анализа. При отсутствии движения данная величина также будет постоянной, она показывает наличие предметов на расстоянии R от антенны. Перемещение предмета с большой отражающей способностью на расстоянии R от объекта приводит к изменению фиксируемой мощности, это обнаруживает микрокомпьютер, анализирующий цифровое значение мощности, поступающее с АЦП0 27.
Цифровые значения, характеризующие мощность отраженного сигнала, далее усредняют для всех импульсов одного пакета и фиксируют изменение уже усредненных величин. Такая обработка уменьшает влияние помех и увеличивает максимальный радиус R при той же амплитуде передаваемого импульса.
Описанную процедуру радиолокации выполняют при отправке любого пакета. Поэтому во многих случаях для радиолокации нет необходимости специально посылать (излучать) пакет, а используют излучение устройства при передаче. Если устройство не передает пакеты в течение периода времени, за которое объект может войти в сферу R (порядка 100 мс), то микрокомпьютер может послать пакет, не содержащий осмысленной информации и предназначенный исключительно для обнаружения движения.
Аналогичным образом используют УВХ1 26 и АПЦ1 28 для создания второй сферы и таким образом становится возможным создание нескольких сфер, в которых определяют движение. В этом случае возможна реализация сценариев, в которых устройство по-разному реагирует на движение в разных сферах. Например, реакция на движение в сфере с меньшим радиусом может быть иной, нежели на движение в сфере с большим радиусом.
Если это целесообразно, возможно аналогично добавить еще несколько каналов УВХ+АЦП или использовать один общий АЦП на несколько УВХ и таким образом реализовать множество сфер, чувствительных к движению.
Для выполнения механических действий устройство содержит один или несколько периферийных исполнительных устройств, в том числе снабженных датчиками обратной связи.
Примером исполнительных устройств могут быть в том числе:
- звуковоспроизводящие устройства;
- электромеханические устройства, в т.ч. имитирующие мимику, обеспечивающие передвижение устройства и выполнение ряда др. физических действий (устройства движения конечностей, а так же хвоста, ушей и т.д., применительно к игрушке);
- осветительные и/или индикаторные
- и др. устройства.
В предпочтительном воплощении таким периферийным устройством является звуковоспроизводящее устройство и электромеханические устройства для перемещения и жестикуляции.
Микрокомпьютер постоянно опрашивает датчики и реагирует на изменения их показаний, активизируя периферийные устройства и меняя свое внутренне состояние.
Например, установив радиосвязь с каким-либо другим подобным устройством, микрокомпьютер может дать команду звуковоспроизводящему устройству синтезировать набор звуков или голосовую фразу или воспроизвести фразу или набор звуков из набора предварительно записанных в памяти.
Воспроизводя или синтезируя фразу или совершая физическое действие, устройство передает по радиоканалу информацию о совершенном действии другим устройствам, с которым установлена радиосвязь.
Это позволяет устройствам реагировать на действия, совершенные другими устройствами данного типа без прямого восприятия и распознавания выполненного действия. В частности, в случае если действие заключается в воспроизведении звука, то устройству, чтобы отреагировать на фразу, не требуется распознавать речь, информация о произнесенной фразе будет им получена по радиоканалу. В рассматриваемом примере микрокомпьютер устройства, получив по радиоканалу данные о том, что в адрес устройства произнесено звуковое (или синтезированное голосовое) приветствие, может дать команду воспроизвести звуковой ответ на приветствие. Такой обмен фразами и информацией о сказанной фразе позволяет разыгрывать диалоги между устройствами. Данная возможность описана в патенте US 6,089,942 (взятом в качестве прототипа данного изобретения).
Наличие микрокомпьютера позволяет устройствам разыгрывать сложные сценарии поведения. По показанию датчика или согласно информации, полученной по каналу связи о действии, произведенном другим устройством, микрокомпьютер может это событие сохранить в памяти и отреагировать спустя некоторое время, либо даже сменить алгоритм поведения. Например, получив по каналу связи информацию о том, что другое устройство произнесло обидную фразу, может быть активизирован сценарий ссоры, и устройство некоторое время будет вести себя более агрессивно. Также, например, может быть запомнено событие, что другое устройство упоминало некоторый набор слов, относящихся к определенной теме, и первое устройство может снова вернуться к этой теме, если пауза в разговоре затянулась.
Таким образом, совокупность имеющихся и приобретенных данных, описывающих взаимодействие, в некотором роде хранит логическое состояние устройства. Последующая реакция устройства на события может определяться этим состоянием. Устройство может сохранять историю своего взаимодействия с окружающими устройствами и/или предметами.
Устройство может содержать различные дополнительные датчики, чтобы получать информацию о событиях в окружающей среды, реагировать на них своим поведением. Это позволяет сделать поведение устройства более разнообразным и интересным.
Датчик освещенности позволит устройству «понять» (получить информацию), что выключен свет, и отреагировать на это, например, сказать или показать, что ему страшно, или имитировать засыпание.
Список таких датчиков может включать:
- датчик температуры,
- датчик наклона,
- датчик ускорения (в т.ч. выполняющий функцию датчика движения),
- микрофон, чтобы обнаруживать звуки и т.д.
Устройство может содержать различные исполнительные механизмы (периферийные устройства) в зависимости от варианта воплощения устройства.
Примером таких механизмов являются:
- устройства имитации мимики,
- устройства движения конечностей (хвоста, ушей и т.д.),
- лампочки или светодиоды,
- колеса для перемещения устройства,
- другие устройства передвижения,
- механические конечности.
Во многих таких игрушках может быть востребована: связь между устройствами, измерение расстояния между ними, обнаружение предметов поблизости. Это становится особенно актуально для игрушек, способных к передвижению.
Предпочтительное воплощение содержит записи звуковых фрагментов (в первую очередь слов) в памяти микрокомпьютера и воспроизводящее устройство, которое по команде микрокомпьютера воспроизводит соответствующий звук. Возможен синтез звуков периферийным устройством (звуковым синтезатором).
Выбор воспроизводимого звука осуществляют микрокомпьютером с учетом:
- показаний датчиков,
- информации, поступившей от других устройств по радиоканалу связи, и
- внутреннего состояния, хранимого в памяти и определяемого предысторией, то есть ранее поступившей информацией и ранее предпринятыми действиями.
Предлагаемое устройство промышленно применимо, поскольку может быть изготовлено промышленным способом на одном кристалле, что дополнительно предполагает высокую автоматизацию его производства, а значит - низкую стоимость.
Литература
1. И.Шахнович «Сверхширокополосная связь. Второе рождение?» Электроника НТБ 4/2001.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИГР | 2011 |
|
RU2475290C1 |
| ИГРОВАЯ СИСТЕМА | 2001 |
|
RU2209651C2 |
| УСТРОЙСТВО ДЛЯ ЗВУКОВОГО УПРАВЛЕНИЯ ИГРУШКОЙ | 2002 |
|
RU2218202C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ЗА ПРЕГРАДОЙ | 2016 |
|
RU2626460C1 |
| ГОВОРЯЩАЯ КУКЛА | 2018 |
|
RU2691909C1 |
| Интерактивные шахматы | 2023 |
|
RU2799731C1 |
| Способ формирования образа человека с учетом характеристик его психологического портрета, полученных под контролем полиграфа | 2015 |
|
RU2617918C2 |
| Образовательно-исследовательский комплекс робот малый антропоморфный | 2019 |
|
RU2718513C1 |
| СПОСОБ УСПОКАИВАНИЯ И/ИЛИ УСЫПЛЕНИЯ РЕБЕНКА И АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2123866C1 |
| ОБУЧАЮЩЕ-ИГРОВАЯ СИСТЕМА С КОМПЬЮТЕРНЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2241255C2 |
Изобретение относится к области развлечений. Интерактивная беспроводная игрушка содержит электронный блок управления, выполненный с возможностью определения движения на заданном расстоянии от указанной игрушки, определения расстояния до другой подобной игрушки и приема и передачи информации. При этом электронный блок управления реализует указанные возможности за счет использования приемопередатчика несинусоидальных сверхширокополосных радиосигналов. Изобретение позволяет упростить конструкцию, повысить эффективность работы устройства, повысить помехозащищенность и снизить стоимость изготовления. 6 з.п. ф-лы, 4 ил.
1. Интерактивная беспроводная игрушка, содержащая электронный блок управления, выполненный с возможностью
определения движения на заданном расстоянии от указанной игрушки,
определения расстояния до другой подобной игрушки,
приема и передачи информации,
отличающаяся тем, что указанный электронный блок управления реализует указанные возможности за счет использования приемопередатчика несинусоидальных сверхширокополосных радиосигналов.
2. Игрушка по п.1, отличающаяся тем, что указанный приемопередатчик использует один генератор импульсов.
3. Игрушка по п.1, отличающаяся тем, что указанный приемопередатчик использует одну антенну.
4. Игрушка по п.1, отличающаяся тем, что одни и те же импульсы используются для передачи информации и для обнаружения движения на принципах радиолокации.
5. Игрушка по п.1, отличающаяся тем, что указанный приемопередатчик реализован на одном полупроводниковом кристалле.
6. Игрушка по п.1, отличающаяся тем, что указанный приемопередатчик реализован с использованием фазированной антенной решетки для определения направления на другую подобную игрушку и/или направления на произвольный движущийся объект в зоне действия радара.
7. Игрушка по п.1, отличающаяся тем, что указанный электронный блок управления выполнен с возможностью менять функциональное состояние и/или алгоритмический сценарий поведения игрушки в зависимости от измеренного расстояния до другой подобной игрушки и/или полученной от другой игрушки информации.
| JP 2003101469 А, 04.04.2003 | |||
| US 6089942 А, 18.07.2000 | |||
| СПОСОБ КАТЕТЕРИЗАЦИИ ВЕН КОНЕЧНОСТЕЙ | 2010 |
|
RU2428220C1 |
| US 6742188 В1, 25.05.2004. | |||

