Изобретение относится к радиотехнике и может быть использовано в контрольно-измерительных системах для анализа загрузки поддиапазонов частот, определения местоположения источников радиоизлучения (ИРИ), измерения частотных и временных параметров радиосигналов, а также напряженности электрического поля линейно-поляризованной волны.
Известны способы и устройства определения координат источников радиоизлучения (см. Пат. РФ №2263328, МПК7 G01S 5/04, опубл. 27.10.2005 г., бюл. №30). Устройство содержит N пространственно разнесенных пунктов приема, каждый из которых представляет собой фазовый интерферометр, пункт управления, дистанционно управляющий пунктами приема по каналам передачи данных и определяющий наиболее вероятное местоположение ИРИ. Устройство-аналог обеспечивает определение местоположения контролируемых ИРИ с заданной точностью. Однако в его задачу не входит проведение технического анализа принимаемых сигналов.
Наиболее близкой по технической сущности к заявляемому устройству является контрольно-измерительная система радиомониторинга ОВЧ и УВЧ диапазонов "Куница" (см. Пат. РФ 234014, МПК7 G01S 5/04, опубл. 10.12.2008 г.). Устройство-прототип содержит центральный контрольно-измерительный комплекс, включающий центральный пункт управления с функциональным программным обеспечением, антенным устройством, коммутатором и контрольно-измерительным устройством, и не менее трех пространственно разнесенных стационарных постов радиоконтроля, обслуживаемых дистанционно через каналы связи центрального пункта управления, и N дополнительных пространственно разнесенных контрольно-измерительных комплексов, N=1, 2, …; каждый из которых содержит пункт управления и пространственно разнесенные стационарные посты радиоконтроля в количестве от 1 до М, обслуживаемые дистанционно через каналы связи центрального пункта управления или пунктов управления дополнительных контрольно-измерительных комплексов, в состав которых эти посты радиоконтроля входят; в состав каждого стационарного поста радиоконтроля входит антенное устройство, состоящее из двухлитерной пеленгаторной антенны, литеры которой размещены в два яруса, антенные элементы которых расположены по окружности, первого антенного коммутатора, информационные входы которого соединены с выходами антенных элементов обеих литеров пеленгаторной антенны, антенны связи, измерительной антенны и второго антенного коммутатора; и контрольно-измерительное устройство, предназначенное для приема и преобразования принимаемых сигналов, обработки полученной информации, запоминания результатов радиомониторинга и их передачу по каналам связи на центральный пункт управления или на ближайший пункт управления дополнительного контрольно-измерительного комплекса, при этом первый и второй информационные входы контрольно-измерительного устройства соединены с первым и вторым выходами первого антенного коммутатора соответственно, третий информационный вход соединен с выходом второго антенного коммутатора, четвертый информационный вход соединен с выходом антенны связи, пятый информационный вход соединен с выходом измерительной антенны, а первый и второй управляющие выходы соединены со входами управления первого и второго антенных коммутаторов соответственно.
Устройство-прототип (см. фиг.1) обеспечивает радиомониторинг заданных ИРИ в пространственно удаленных зонах (определение местоположения ИРИ и технический анализ их сигналов) с использованием значительного числа необслуживаемых постов радиоконтроля, что существенно понижает затраты по его эксплуатации.
Однако прототипу присущи существенные недостатки, вытекающие из особенностей предложенной в нем структуры системы радиомониторинга:
использование ограниченного количества стационарных постов радиоконтроля предопределяют неизменность границ зон контроля и отсутствие реакции системы радиомониторинга на изменение оперативной (радиоэлектронной) остановки в результате пространственного смещения контролируемых ИРИ;
ограниченная доступность (в ряде случаев полное ее отсутствие) сигналов контролируемых ИРИ УВЧ- и СВЧ-диапазонов даже в пределах контролируемых зон;
невозможность уточнения результатов измерений (например, местоположения ИРИ) путем своевременного перемещения постов радиоконтроля в силу их стационарности;
отсутствие комплексного подхода к решению задач радиоконтроля, состоящего в совместном использовании результатов измерений в радио, видео, инфракрасном и др. диапазонах волн.
Целью заявляемого технического решения является расширение зоны радиомониторинга и повышение его эффективности за счет использования мобильных постов радиоконтроля и постов радиоконтроля на ЛПС.
Здесь под эффективностью радиомониторинга понимается повышение точности местоопределения заданных при повышении их электромагнитной доступности.
Поставленная цель достигается тем, что в известную контрольно-измерительную систему, содержащую центральный контрольно-измерительный комплекс, включающий центральный пункт управления с функциональным программным обеспечением, антенным устройством, коммутатором и контрольно-измерительным устройством, и не менее трех пространственно разнесенных стационарных постов радиоконтроля, обслуживаемых дистанционно через каналы связи центрального пункта управления, и N дополнительных пространственно разнесенных контрольно-измерительных комплексов, N=1, 2, …; каждый из которых содержит пункт управления и пространственно разнесенные стационарные посты радиоконтроля в количестве от 1 до М, обслуживаемые дистанционно через каналы связи центрального пункта управления или пунктов управления дополнительных контрольно-измерительных комплексов, в состав которых эти посты радиоконтроля входят; в состав каждого стационарного поста радиоконтроля входит антенное устройство, состоящее из двухлитерной пеленгаторной антенны, литеры которой размещены в два яруса, антенные элементы которых расположены по окружности, первого антенного коммутатора, информационные входы которого соединены с выходами антенных элементов обеих литеров пеленгаторной антенны, антенны связи, измерительной антенны и второго антенного коммутатора; и контрольно-измерительное устройство, предназначенное для приема и преобразования принимаемых сигналов, обработки полученной информации, запоминания результатов радиомониторинга и их передачи по каналам связи на центральный пункт управления или на ближайший пункт управления дополнительного контрольно-измерительного комплекса, первый и второй информационные входы контрольно-измерительного устройства соединены с первым и вторым выходами первого антенного коммутатора соответственно, третий информационный вход соединен с выходом второго антенного коммутатора, четвертый информационный вход соединен с выходом антенны связи, пятый информационный вход соединен с выходом измерительной антенны, а первый и второй управляющие выходы соединены со входами управления первого и второго антенных коммутаторов соответственно, дополнительно введены R мобильных обслуживаемых постов радиоконтроля, R=1, 2, …; и L необслуживаемых постов радиоконтроля на летно-подъемных средствах (ЛПС), L=1, 2, …; управляемых дистанционно через каналы связи центрального пункта управления или ближайшего пункта управления дополнительного контрольно-измерительного комплекса, а в антенное устройство каждого стационарного поста радиоконтроля дополнительно введено две антенны слухового контроля, выходы которых подключены ко входам второго антенного коммутатора, а третий управляющий выход контрольно-измерительного устройства подключен ко входу управления измерительной антенны.
Мобильный пост радиоконтроля содержит антенное устройство, состоящее из пеленгаторной антенны, выполненной в одно- или двухлитерном исполнении, антенные элементы которых располагаются по окружности или эллипсу, первого антенного коммутатора, информационные входы которого соединены с выходами антенных элементов пеленгаторной антенны, антенны слухового контроля, первой ненаправленной антенны, последовательно соединенных второй ненаправленной антенны, второго антенного коммутатора и конвертора, антенны связи, антенны глобальной спутниковой системы местоопределения, последовательно соединенных опорно-поворотного устройства и измерительной антенны; последовательно соединенные контроллер и видеокамеру, предназначенные для уточнения местоположения контролируемых источников радиоизлучений, и контрольно-измерительное устройство, предназначенное для приема и преобразования принимаемых сигналов, обработки полученной информации, определения местоположения и ориентации транспортного средства мобильного поста радиоконтроля, и передачи по каналам связи обработанной информации на центральный пункт управления или ближайший пункт управления дополнительного контрольно-измерительного комплекса, причем первый и второй информационные входы контрольно-измерительного устройства соединены с первым и вторым выходами первого антенного коммутатора соответственно, третий информационный вход соединен с выходом антенны слухового контроля, четвертый информационный вход соединен с выходом первой ненаправленной антенны, пятый информационный вход соединен со вторым выходом второго антенного коммутатора, шестой информационный вход соединен с выходом конвертора, седьмой вход соединен с выходом антенны связи, восьмой вход - с выходом антенны глобальной спутниковой системы местоопределения, девятый вход соединен с выходом измерительной антенны, а десятый вход - с информационным выходом контроллера, первый и второй выходы управления соединены со входами управления первого и второго антенных коммутаторов соответственно, третий выход управления соединен со входом управления контроллера, а четвертый выход управления - со входом управления опорно-поворотного устройства.
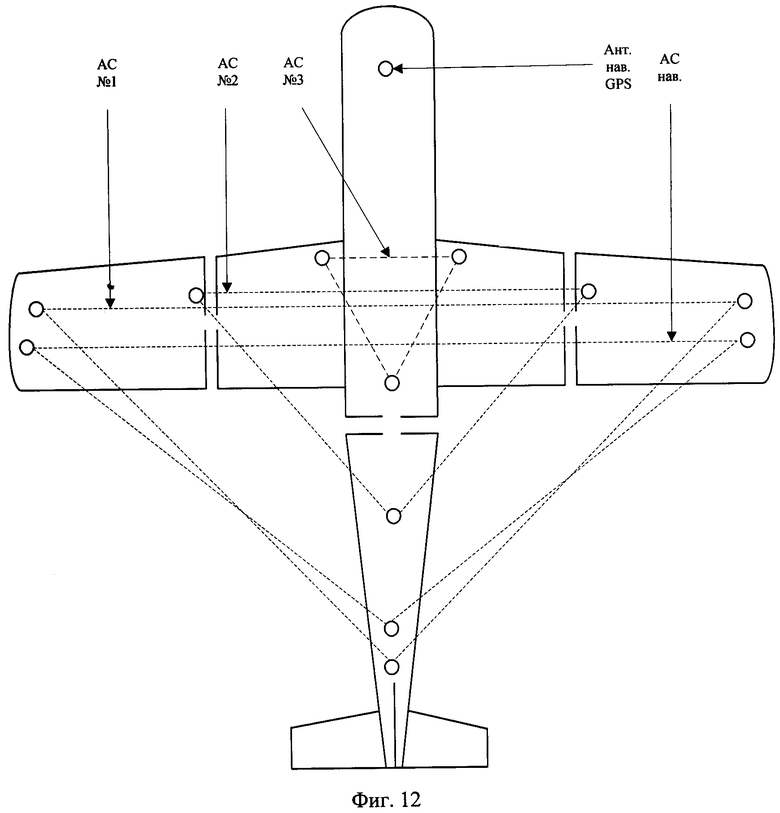
Пост радиоконтроля на летно-подъемном средстве выполнен содержащим трехлитерную пеленгаторную антенну, каждый литер которой содержит три антенных элемента, которые размещаются в вершинах равностороннего треугольника на крыльях и фюзеляже ЛПС, антенну пространственной ориентации ЛПС, состоящую из четырех антенных элементов, три из которых размещаются в вершинах равностороннего треугольника на крыльях и фюзеляже ЛПС, а четвертый антенный элемент обеспечивает прием сигналов глобальной спутниковой системы местоопределения и размещается в носовой части ЛПС, первую и вторую антенны связи, устройство навигации, первый, второй, третий и четвертый информационные входы которого соединены с выходами первого, второго, третьего и четвертого антенных элементов антенны пространственной ориентации ЛПС соответственно, последовательно соединенные контроллер и видеокамеру, предназначенные для уточнения местоположения контролируемых ИРИ, контрольно-измерительное устройство, предназначенное для приема и преобразования принимаемых сигналов и их передачу по каналам связи на центральный пункт управления или ближайший пункт управления дополнительного контрольно-измерительного комплекса, первый информационный вход контрольно-измерительного устройства соединен с информационным выходом устройства навигации, со второго по десятый информационные входы соединены с выходами антенных элементов трехлитерной пеленгаторной антенны соответственно, одиннадцатый информационный вход соединен с выходом первой антенны связи, информационный выход контрольно-измерительного устройства соединен с входом второй антенны связи, а выход управления соединен со входом управления контроллера.
Перечисленная новая совокупность признаков за счет того, что вводятся новые элементы и связи, позволяет достичь цели изобретения: расширить зону контроля радиомониторинга и повысить его эффективность (улучшить электромагнитную доступность контролируемых ИРИ и повысить точность их местоопределения) за счет введения мобильных постов радиоконтроля в совокупности с постами на ЛПС, а также за счет использования видеоизображения местоположения контролируемых объектов для уточнения результатов оценивания.
Заявляемая контрольно-измерительная система радиомониторинга поясняется чертежами, на которых:
на фиг.1 иллюстрируется пространственное размещение элементов контрольно-измерительной системы радиомониторинга;
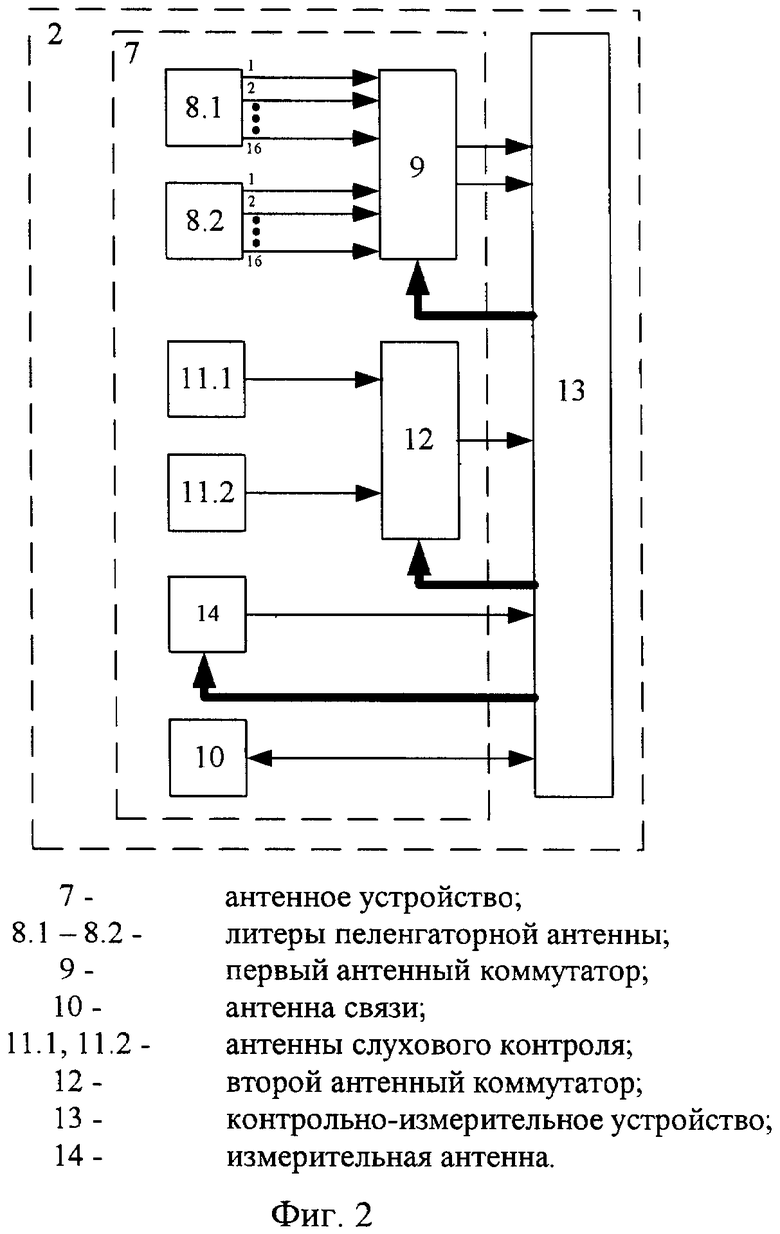
на фиг.2 - структурная схема стационарного поста радиомониторинга;
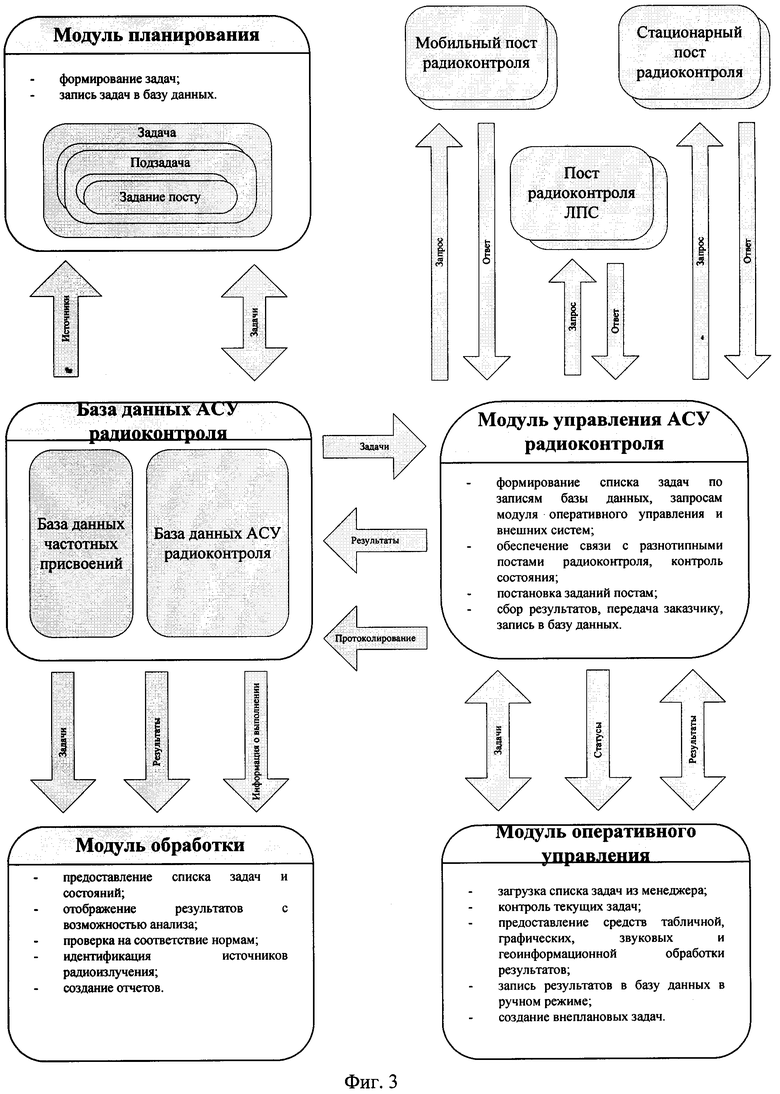
на фиг.3 - структурная схема АСУ контрольно-измерительной системы радиомониторинга;
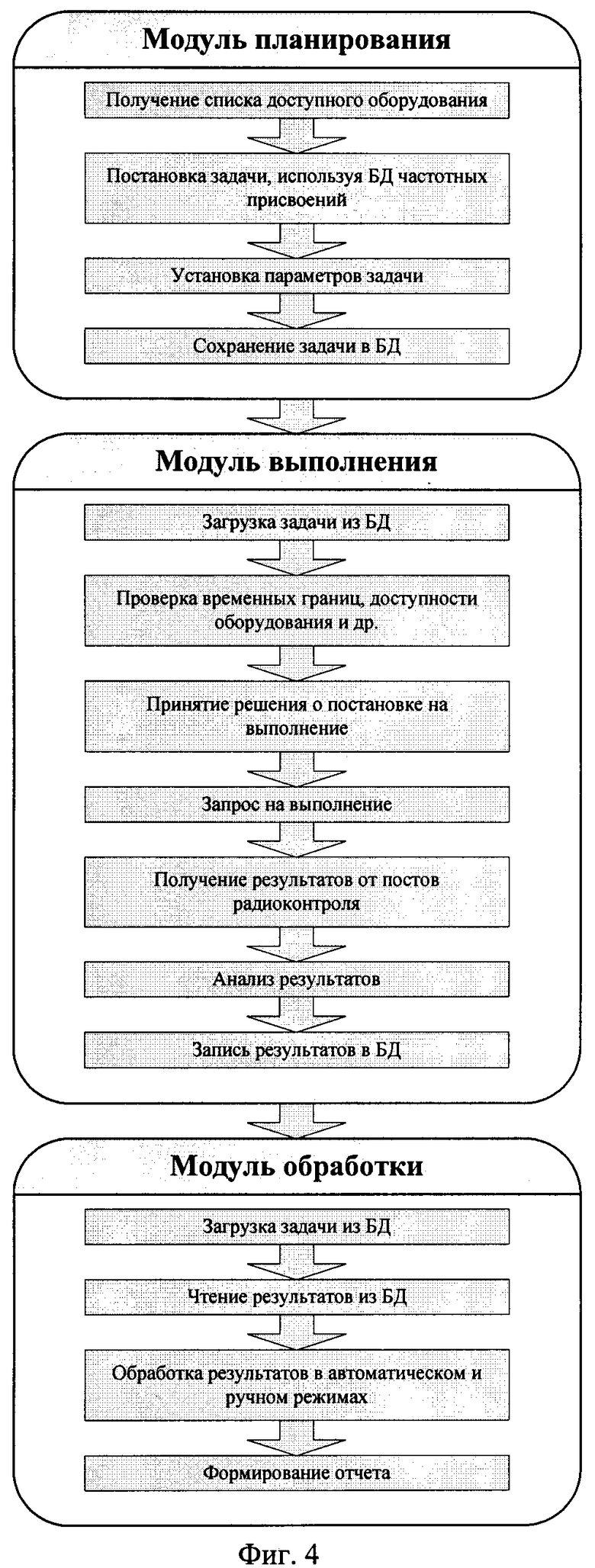
на фиг.4 - алгоритм функционирования АСУ контрольно-измерительной системы радиомониторинга;
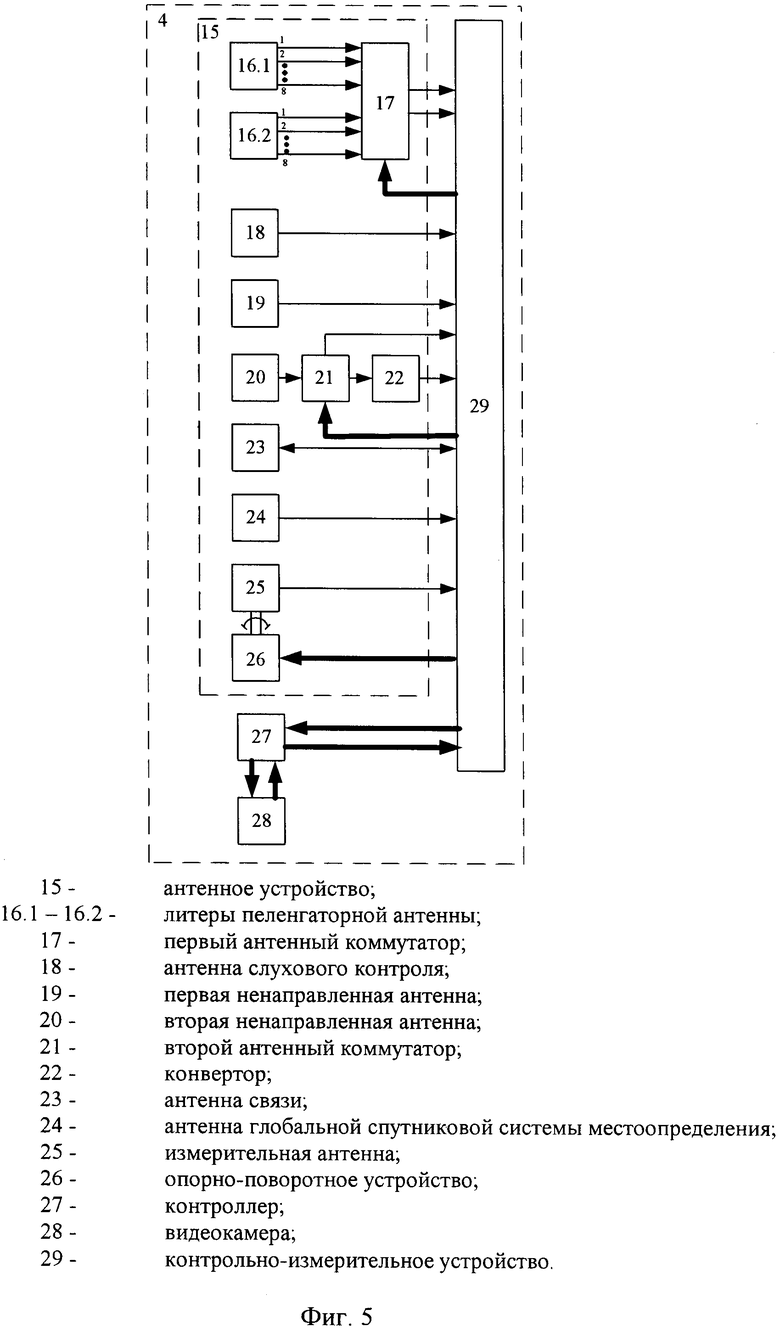
на фиг.5 - структурная схема мобильного поста радиоконтроля;
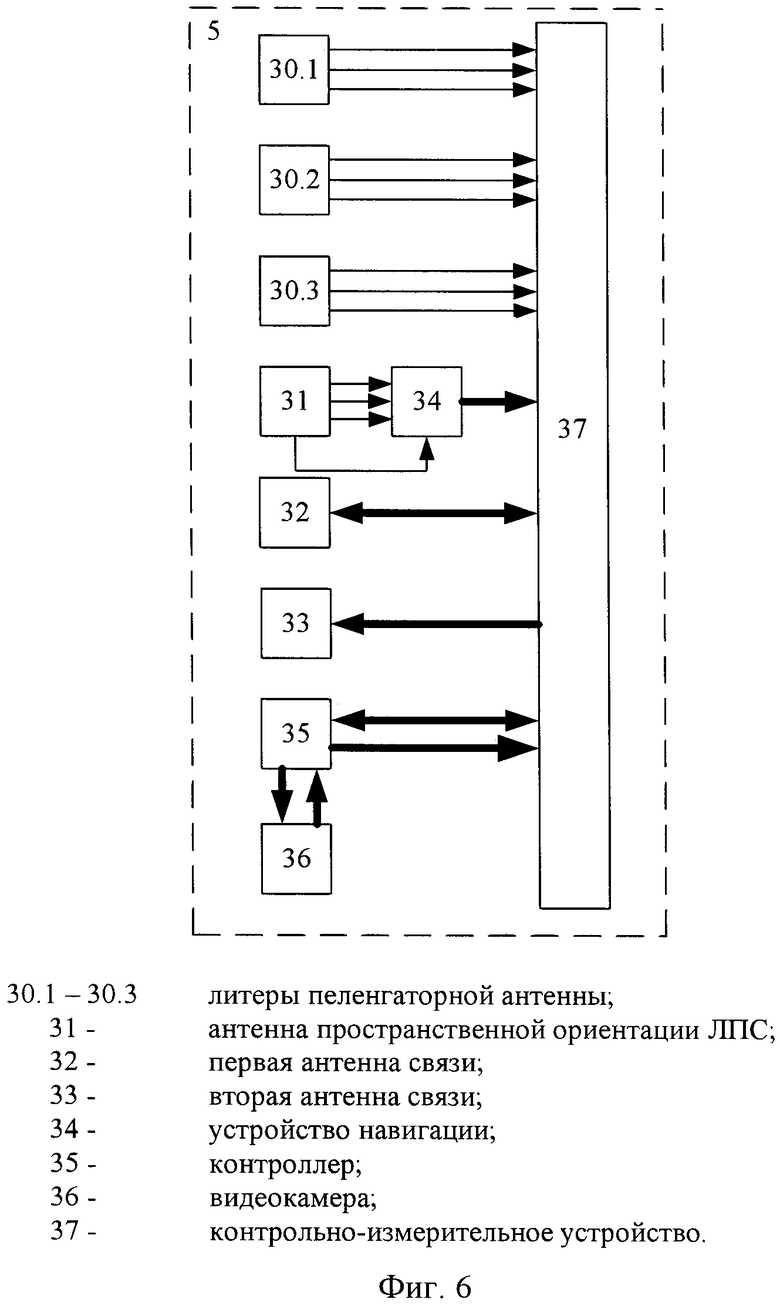
на фиг.6 - структурная схема поста радиоконтроля на летно-подъемном средстве;
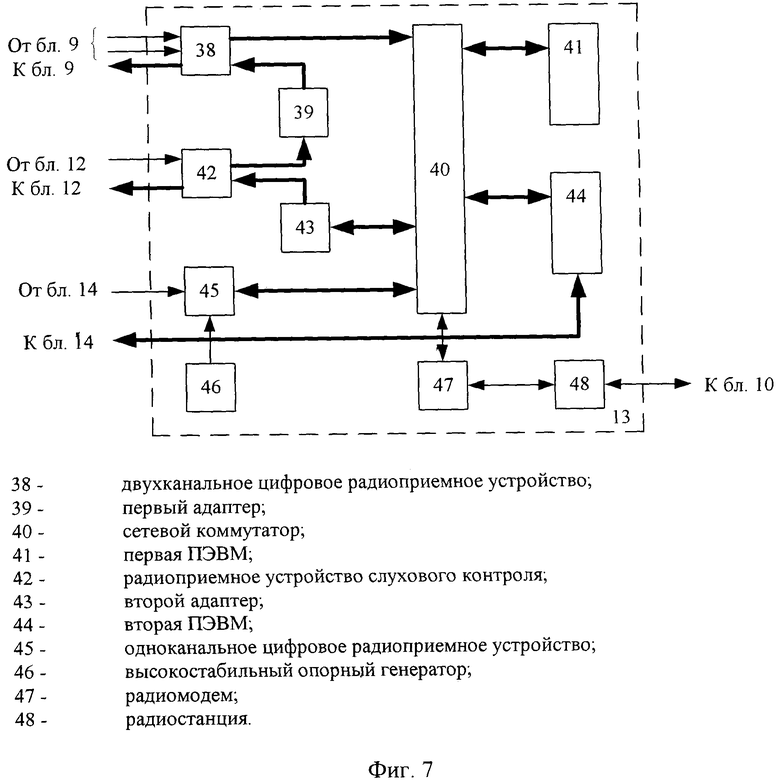
на фиг.7 - структурная схема контрольно-измерительного устройства стационарного поста радиоконтроля;
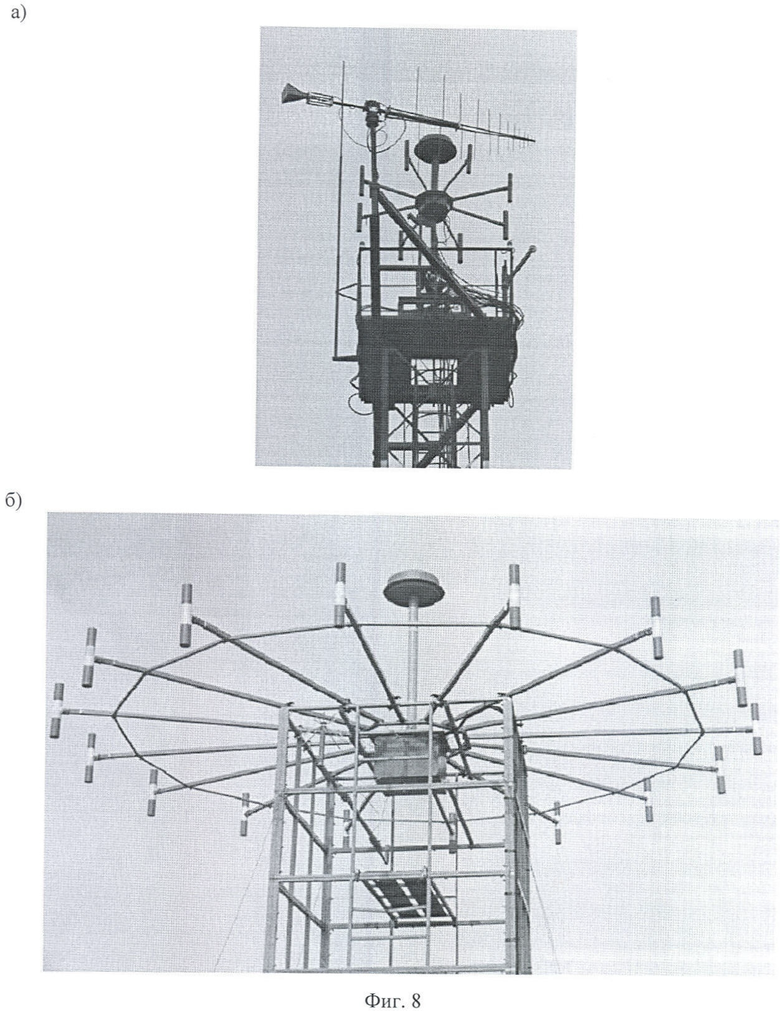
на фиг.8 приведены варианты реализации двухлитерной пеленгатороной антенны:
а) на мачте;
б) на башне;
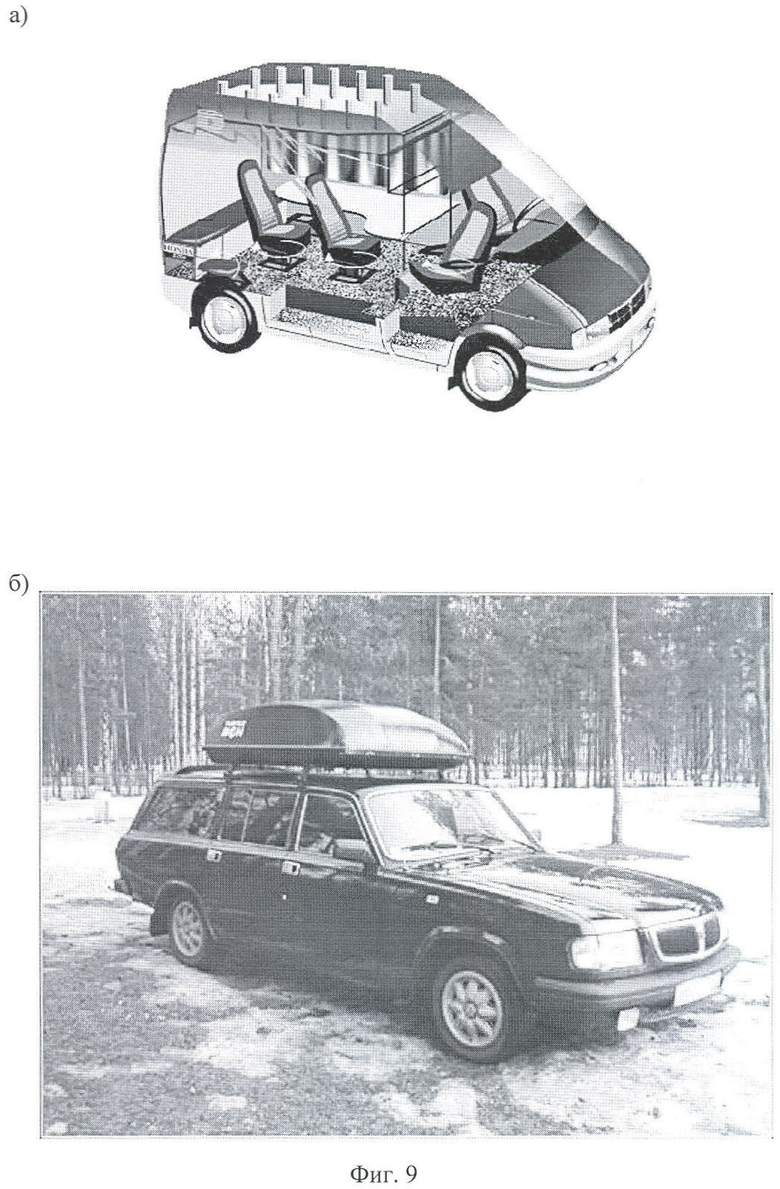
на фиг.9 иллюстрируются варианты реализации мобильного поста радиоконтроля:
а) на базе микроавтобуса;
б) на базе легкового автомобиля;
на фиг.10 - структурная схема контрольно-измерительного устройства мобильного поста радиоконтроля;
на фиг.11 - структурная схема контрольно-измерительного устройства поста радиоконтроля на ЛПС;
на фиг.12 - порядок размещения антенных элементов на ЛПС;
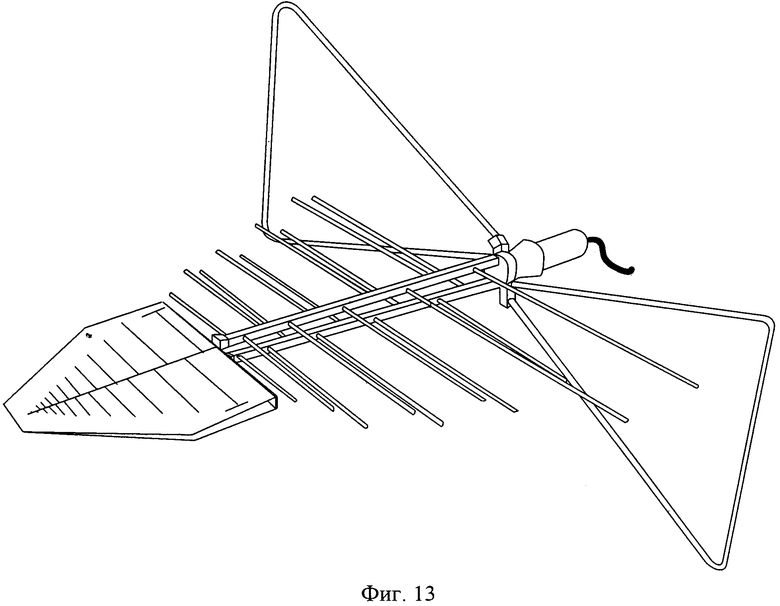
на фиг.13 - внешний вид логопериодической комбинированной антенны П6-11.
Существующие контрольно-измерительные системы радиомониторинга предназначены для определения местоположения контролируемых ИРИ, соответствие используемых ими рабочих частот, видов сигналов, ширины спектра и т.д. заданным. Однако точностные характеристики известных способов радиомониторинга существенно зависят от соотношения сигнал/шум, геометрии размещения измерителей, полноты использования параметров электромагнитного поля, количества этапов обработки пространственно-информационных параметров и т.д. Эффективность названных подходов в различных ситуациях отличается друг от друга и, как правило, низка.
В предлагаемой контрольно-измерительной системе радиомониторинга для решения названной проблемы предлагается дополнительно в состав прототипа ввести мобильные посты радиоконтроля и посты радиоконтроля на ЛПС. В результате достигается расширение общей зоны контроля с возможностью оперативного реагирования на изменения ее границ, обеспечивается электромагнитная доступность до всех контролируемых ИРИ вне зависимости от рельефа местности и наличия дорог, повышается точность их местоопределения благодаря оптимизации геометрии размещения постов радиоконтроля (стационарных в совокупности с мобильными). Кроме того, в предлагаемой системе для повышения точности местоопределения ИРИ используют видеоизображение ИРИ, полученное в результате наведения на него видеокамеры. Управление камерой осуществляют с использованием пространственных параметров сигналов ИРИ: пеленга θ и угла места β (наведение видеокамеры выполняется радиопеленгатором мобильного поста радиоконтроля или поста на ЛПС). Дополнительное повышение точности местоопределения ИРИ с использованием стационарных постов (по сравнению с прототипом) достигается благодаря использованию одноэтапной обработки пространственных параметров сигналов (см. Кондратов В.С. и др. Многопозиционные радиотехнические системы / В.С.Кондратьев, А.Ф.Котов, Л.Н.Марков; под. ред. проф. В.В.Цветнова. - М.: Радио и связь, 1989 г. - 264 с.).
Предлагаемая контрольно-измерительная система радиомониторинга содержит (см. фиг.1 и 2) центральный контрольно-измерительный комплекс, включающий центральный пункт управления 1 с функциональным программным обеспечением, антенным устройством, коммутатором и контрольно-измерительным устройством, и не менее трех пространственно разнесенных стационарных постов радиоконтроля 2, обслуживаемых дистанционно через каналы связи центрального пункта управления 1; и N дополнительных пространственно разнесенных контрольно-измерительных комплексов, N=1, 2, …; каждый из которых содержит пункт управления 3 и пространственно разнесенные стационарные посты радиоконтроля 2 в количестве от 1 до М, обслуживаемые дистанционно через каналы связи центрального пункта управления 1 или пунктов управления 3 дополнительных контрольно-измерительных комплексов, в состав которых эти посты радиоконтроля входят; в состав каждого стационарного поста радиоконтроля входит антенное устройство 7, состоящее из двухлитерной пеленгаторной антенны 8.1 и 8.2, литеры которой размещены в два яруса, антенные элементы которых расположены по окружности, первого антенного коммутатора 9, информационные входы которого соединены с выходами антенных элементов обеих литеров 8.1 и 8.2 пеленгаторной антенны, антенны связи 10, измерительной антенны 14 и второго антенного коммутатора 12; и контрольно-измерительное устройство 13, предназначенное для приема и преобразования принимаемых сигналов, обработки полученной информации, запоминания результатов радиомониторинга и их передачи по каналам связи на центральный пункт управления 1 или на ближайший пункт управления 3 дополнительного контрольно-измерительного комплекса, первый и второй информационные входы контрольно-измерительного устройства 13 соединены с первым и вторым выходами первого антенного коммутатора 9 соответственно, третий информационный вход соединен с выходом второго антенного коммутатора 12, четвертый информационный вход соединен с выходом антенны связи 10, пятый вход соединен с выходом измерительной антенны 14, а первый и второй управляющие выходы соединены со входами управления первого 9 и второго 12 антенных коммутаторов соответственно.
Для расширения зоны радиомониторинга и повышения его эффективности дополнительно введены R мобильных, обслуживаемых постов радиоконтроля 4, R=1, 2, …; и L необслуживаемых постов радиоконтроля 5 на летно-подъемных средствах (ЛПС), L=1, 2, …; управляемых дистанционно через каналы связи центрального пункта управления 1 или ближайшего пункта управления 3 дополнительного контрольно-измерительного комплекса, а в антенное устройство каждого стационарного поста радиоконтроля 2 дополнительно введено две антенны слухового контроля 11.1 и 11.2, выходы которых подключены ко входам второго антенного коммутатора 12, а третий управляющий выход контрольно-измерительного устройства 13 соединен со входом управления измерительной антенны 14.
Кроме того, мобильный пост радиоконтроля 4 (см. фиг.5) содержит антенное устройство 15, состоящее из пеленгаторной антенны, выполненной в одно 16 или двухлитерном 16.1 и 16,2 исполнении, антенные элементы которых располагаются по окружности или эллипсу. Первый антенный коммутатор 17, информационные входы которого соединены с выходами антенных элементов пеленгаторной антенны 16. Антенну контроля 18, первую ненаправленную антенну 19 и последовательно соединенные вторую ненаправленную антенну 20, второй антенный коммутатор 21 и конвертор 22. Антенну связи 23 и антенну глобальной спутниковой системы местоопределения 24, а также последовательно соединенные опорно-поворотное устройство 26 и измерительную антенну 25. Кроме того, мобильный пост радиоконтроля 4 содержит последовательно соединенные контроллер 27 и видеокамеру 28, предназначенные для уточнения местоположения контролируемых источников радиоизлучений.
Контрольно-измерительное устройство 29 предназначено для приема и преобразования принимаемых сигналов, обработки полученной информации, определения местоположения и ориентации транспортного средства мобильного поста радиоконтроля 4 и передачи по каналам связи обработанной информации на центральный пункт управления 1 или ближайший пункт управления 3 дополнительного контрольно-измерительного комплекса. Причем первый и второй информационные входы контрольно-измерительного устройства 29 соединены с первым и вторым выходами первого антенного коммутатора 17 соответственно, третий информационный вход соединен с выходом антенны слухового контроля 18, четвертый информационный вход соединен с выходом первой ненаправленной антенны 19, пятый информационный вход соединен со вторым выходом второго антенного коммутатора 21, шестой информационный вход соединен с выходом конвертора 22, седьмой вход соединен с выходом антенны связи 23, восьмой вход соединен с выходом антенны глобальной спутниковой системы местоопределения 24, девятый вход соединен с выходом измерительной антенны 25, а десятый вход - с информационным выходом контроллера 27. Первый и второй выходы контрольно-измерительного устройства 29 соединены со входами управления первого 17 и второго 21 антенных коммутаторов соответственно, третий выход управления соединен со входом управления контроллера 27, а четвертый вход управления соединен со входом управления опорно-поворотного устройства 26.
Пост радиоконтроля 5 (см. фиг.6) на летно-подъемном средстве выполнен содержащим трехлитерную пеленгаторную антенну 30.1-30.3, каждый литер которой содержит три антенных элемента, которые размещаются в вершинах равностороннего треугольника на крыльях и фюзеляже ЛПС. Антенна пространственной ориентации ЛПС 31 состоит из четырех антенных элементов, три их которых размещаются в вершинах равностороннего треугольника на крыльях и фюзеляже ЛПС. Четвертый антенный элемент обеспечивает прием сигналов глобальной спутниковой системы местоопределения и размещается в носовой части ЛПС. Первая и вторая антенны связи 32 и 33 соответственно, устройство навигации 34. Первый, второй, третий и четвертый информационные входы устройства навигации 34 соединены с первым, вторым, третьим и четвертым выходами антенны пространственной ориентации ЛПС 31 соответственно. Последовательно соединенные контроллер 35 и видеокамера 36, предназначенные для уточнения местоположения контролируемых ИРИ. Контрольно-измерительное устройство 37 предназначено для приема и преобразования принимаемых сигналов и их передачу по каналам связи на центральный пункт управления 1 или ближайший пункт управления 3 дополнительного контрольно-измерительного комплекса. Первый информационный вход контрольно-измерительного устройства 37 соединен с информационным выходом устройства навигации 34, со второго по десятый информационные входы соединены с выходами антенных элементов трехлитерной пеленгаторной антенны 30.1-30.3 соответственно, одиннадцатый информационный вход соединен с выходом первой антенны связи 32. Информационный выход блока 37 соединен с входом второй антенны связи 33, а выход управления контрольно-измерительного устройства 37 соединен со входом управления контроллера 35.
Предлагаемая контрольно-измерительная система радиомониторинга содержит центральный и N дополнительных идентичных между собой контрольно-измерительных комплексов. В связи с этим целесообразным является одновременное рассмотрение реализационных аспектов и их работу на примере одного из них.
Каждый контрольно-измерительный комплекс содержит пункт управления 1 (3) и несколько стационарных постов радиоконтроля 2. Посты радиоконтроля 2 могут быть оснащены серийно выпускаемыми стационарными изделиями "Барс-МПИ2" различных модификаций. Структурная схема одного из вариантов комплекса приведена на фиг.2, а на фиг.7 - структурная схема контрольно измерительного устройства 13. Данное изделие прошло освидетельствование в Федеральном агентстве по техническому регулированию и метрологии (RU. С.35.002. А №38992) и зарегистрировано в Государственном реестре средств измерений под №43662-10 и допущено к применению в Российской Федерации. Изделие выпускается ООО "Специальный Технологический Центр" г.Санкт-Петербург. Стационарный комплекс "Барс-МПИ2" предназначен для анализа загрузки поддиапазонов частот, пеленгования источников радиоизлучений ОВЧ-СВЧ-диапазонов, измерений частотных и временных параметров радиосигналов, а также напряженности электрического поля линейно-поляризованной волны. Двухканальное цифровое радиоприемное устройство 38 (см. фиг.7) в совокупности с блоками 8.1; 8,2 и 9 (см. фиг.2) реализуют фазовый интерферометр в соответствии с Пат. РФ №2263327, МПК7 G01S 3/14, опубл. 27.10.2005 г., бюл. №30. Вариант реализации двухлитерной пеленгаторной антенны приведен на фиг.8а, б. Инструментальная погрешность измерения направления на ИРИ в секторе 360 градусов в диапазоне частот 25-18000 МГц составляет 1-5 градусов.
Технический анализ осуществляется с помощью приемного тракта в составе одноканального радиоприемного устройства 45 и измерительной антенной 14. В качестве последней в полосе частот 30-1000 МГц использована комбинированная логопериодическая антенна (см. фиг.13), прошедшая освидетельствование в Федеральном агентстве по техническому регулированию и метрологии (RU. С.35.002. А №42330) и получившая наименование П6-11 (регистрационный №46561-11). Новизна антенны подтверждена Пат. РФ по заявке №2010109166 от 11.03.2010 г., МПК H01Q 21/30. Серийно выпускается ООО "Специальный Технологический Центр" г.Санкт-Петербург. Дополнительно в измерительную антенну 14 включено поворотное устройство G-5500 с платой управления от ПЭВМ 44. В качестве радиоприемного устройство слухового контроля 42 используется полупрофессиональный приемник IС8500. Радиоприемники 38 и 45 разработаны и изготавливаются ООО "Специальный Технологический Центр" г.Санкт-Петербург. В диапазоне частот 1000-18000 МГц используется измерительная антенна П6-59.
При реализации стационарного поста радиоконтроля 2 изделием "Барс-МПИ2" обеспечивается структурный доступ к цифровым системам связи (в том числе стандарт TETRA), сотовой связи второго (стандарты GSM, CDMA) и третьего (стандарт UMTS) поколений, беспроводного широкополосного радиодоступа (стандарты 802.11 и 802.16), радио (DAB) и телевизионного вещания (DB V-Т).
Результаты измерений первичных пространственно-информационных параметров контролируемых ИРИ и технические параметры их сигналов по каналам связи передаются на центральный 1 или соответствующий дополнительный 3 пункт управления.
Пункт управления 1 (3) может размещаться совместно с одним из стационарных постов радиоконтроля 2 или отдельно. В состав входят модули оперативного управления системой, планирования, обработки, база данных и управления автоматизированной системой управления (см. фиг.3 и 4). Формируемые на пункте управления 1 (3) задачи постам радиоконтроля 2 должны учитывать особенности региона развертывания (рельефа местности, наличия дорог и т.д.), загрузки диапазона частот, комплектности системы и т.д.
Связь между пунктами управления 1(3) и постами радиоконтроля 2, а также между пунктами 1 и 3 может быть организована по волоконной оптике, каналам радиорелейной связи 400-450. МГц, радиосвязи 140-170 МГц, каналам GSM, Интернет и др. Наиболее распространенным является принцип организации радиосвязи типа "звезда".
Повышение точности местоопределения контролируемых ИРИ стационарными постами радиоконтроля 2 достигается благодаря использованию одноэтапной обработки результатов измерений на пункте управления 1 (3) в соответствии с Пат. РФ №2263328, МПК7 G01S 5/04, опубл. 27.10.2005 г., бюл. №30; Пат. РФ №2341811, МПК7 G01S 3/14, опубл. 20.12.2008 г., бюл. №35. При этом на пункт управления 1(3) со стационарных постов радиоконтроля 2 передаются не пространственные параметры сигналов (пеленг θ и угол места β), а первичные пространственно-информационные параметры: разности фаз контролируемого сигнала φi,j(fi), полученные в результате приема антенными элементами i и j литера пеленгаторной антенны (см. Кондратов В.С. и др. Многопозиционные радиотехнические системы / В.С.Кондратьев, А.Ф.Котов, Л.Н.Марков; под. ред. проф. В.В.Цветнова. - М.: Радио и связь, 1989 г. - 264 с.).
В тех случаях, когда контрольно-измерительной системой радиомониторинга не обеспечивается электромагнитная доступность до контролируемых ИРИ или точность их местоопределения не соответствует заданным требованиям предлагается использовать мобильные посты радиоконтроля 4. В качестве транспортной базы для них могут быть использованы легковые автомобили с багажником или прицепом, микроавтобусы т.д. (см. фиг.9а, б). В прибрежных районах возможно использование катеров.
Мобильный пост радиоконтроля 4 предназначен как для самостоятельного определения местоположения контролируемых ИРИ, так и для совместной работы со стационарными постами радиоконтроля 2. При этом обеспечивается программная и аппаратурная их совместимость. Кроме того, пост 4 осуществляет измерение частотных и временных параметров радиосигналов, анализ загрузки диапазона частот, измерение напряженности электрического поля. Свои функции он выполняет в движении. Мобильный пост радиоконтроля на базе "Барс-МПИ2" удовлетворяет требованиям ГОСТ Р52536-2006, Положения единой технической политики предприятий радиочастотной службы, а по условиям эксплуатации соответствует группе 3 УХЛ (ГОСТ Р22261-94).
На фиг.9а, б приведен внешний вид мобильного поста радиоконтроля на различной транспортной базе, в основу которого положено изделие "Барс-МПИ2", а на фиг.5 и 10 - структурные схемы поста 4 и контрольно-измерительного устройства 29 соответственно.
Местоопределение контролируемых ИРИ в данном изделии реализуется в соответствии с Пат. РФ №2327186, МПК GOIS 13/46, опубл. 20.06.2008 г., бюл. №17; Пат. РФ №2283503, G01S 13/46, опубл. 10.09.2006 г., бюл. №25. Данная функция выполняется с помощью двухканального цифрового радиоприемного устройства 49 (см. фиг.10) в совокупности с пеленгаторной антенной системой 16.1 и 16.2 и антенным коммутатором 17 (см. фиг.5). Антенно-фидерное коммутационное оборудование находится под радиопрозрачным куполом на крыше автомобиля (см. фиг.9а) или в его багажнике (см. фиг.9б).
Уточнение местоположения ИРИ осуществляется с помощью видеокамеры 28 (см. фиг.5), управление наведением которой выполняет измеритель координат на базе блоков 49 и 55 (см. фиг.10). Данный процесс подробно рассмотрен в Пат. РФ по заявке №2099146632, МПК G01S 5/04.
Точность измерения собственного местоположения мобильного поста радиоконтроля 4 и его пространственной ориентации в значительной степени определяют точностные характеристики при его работе в движении. Данная операция осуществляется с помощью блоков 24 (см. фиг.5), 52, 58 и 51 (см. фиг.10) в соответствии с Пат. РФ №2374659, МПК G01S 5/00, опубл. 27.11.2009 г., бюл. №33.
Технический анализ сигналов контролируемых ИРИ на остановках осуществляется с помощью блоков, 25 (П6-11 или П6-59, см. фиг.5), одноканального цифрового радиоприемника 58 и ПЭВМ 55 (см. фиг.10). В процессе движения на посту радиоконтроля 4 для этой цели используют ненаправленную антенну 20. Результаты измерений с мобильного поста радиоконтроля 4 по каналу связи передаются на соответствующий пункт управления 1 (3).
При отсутствии электромагнитной доступности до сигналов контролируемых ИРИ, недостаточной точности их местоопределения, а также при размещении источников в труднодоступной местности предлагается использование постов радиоконтроля на ЛПС 5. В качестве последнего целесообразно использовать изделие "Орлан-10" (см. http://bla-orlan.ru/default/catalog/bla/orlan-10.html) на беспилотном летательном аппарате (БЛА), разработанного ООО "Специальный Технологический Центр" (см. Всероссийский аэрокосмический журнал "Вестник авиации и космонавтики" №3, 2010 г.). На фиг.6 приведена структурная схема изделия "Орлан-10", размещаемого на ЛПС, на фиг.11 - структурная схема контрольно-измерительного устройства поста радиоконтроля на ЛПС 5, а на фиг.12 иллюстрируется порядок размещения антенных элементов на корпусе ЛПС. В предлагаемой контрольно-измерительной системе реализована программная и аппаратурная совместимость пунктов управления 1 (3) с постами радиоконтроля на ЛПС 5.
Рабочее место оператора изделия "Орлан-10" совмещается с пунктом управления системы 1 (3). Имеется возможность осуществлять одновременное управление четырьмя беспилотными летательными аппаратами (БПЛА) с одного пункта управления 1 (3). В качестве карты используется растровое изображение местности с привязкой по нескольким точкам или электронная карта. На маршруте полета указывается до 60-ти точек, в которых задается высота и признак ее облета: проход по высоте или барражирование. Корректировка маршрута осуществляется по низкоскоростному радиоканалу на частотах 900-920 МГц. Оператором указываются точки включения и выключения оборудования, точка посадки и т.д. Масса полезной нагрузки БПЛА 5 кг, способ старта - с разборной катапульты, приземление - на парашюте. Воздушная скорость БПЛА 90-150 км/ч, максимальная продолжительность полета 16 часов, максимальная дальность перемещения комплекса 600 км, максимальная высота полета 5 км.
С помощью блоков 31 и 34 (см. фиг.6) определяют текущее местоположение и пространственную ориентацию БЛА в соответствии с Пат. РФ №2.371733, МПК G01S 5/10, опубл. 27.10.2009 г., бюл. №30. Блоки 30.1-30.3 (см. фиг.6), 60 и 61 (см. фиг.11) предназначены для нахождения местоположения контролируемых ИРИ с учетом пространственной ориентации БПЛА. Управление изделием "Орлан-10" осуществляется по низкоскоростному дуплексному каналу связи на частотах 900-920 МГц в режиме ППРЧ. По этому каналу с поста управления 1 (3) поступает управляющая информация на наведение видеокамеры на контролируемый ИРИ. Результаты определения местоположения ИРИ (работающих в полосе частот 30-3000 МГц) и видеоизображение источника на пункт управления 1 (3) поступают с борта по высокоскоростному симплексному каналу на частотах 2000-2500 МГц. Скорость передачи информации 2 Мбита/с. Дальность связи для различных условий составляет 100-130 км.
| название | год | авторы | номер документа |
|---|---|---|---|
| Контрольно-измерительная система радиомониторинга | 2022 |
|
RU2790349C1 |
| КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА МОНИТОРИНГА | 2017 |
|
RU2662726C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2009 |
|
RU2419162C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2011 |
|
RU2469408C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ПОБОЧНЫХ ЭЛЕКТРОМАГНИТНЫХ ИЗЛУЧЕНИЙ | 2022 |
|
RU2789100C1 |
| КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА РАДИОМОНИТОРИНГА ОВЧ И УВЧ ДИАПАЗОНОВ "КУНИЦА" | 2007 |
|
RU2340914C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2008 |
|
RU2370824C1 |
| КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС РАДИОМОНИТОРИНГА НЧ-, СЧ- И ВЧ-ДИАПАЗОНА "РОСОМАХА" | 2006 |
|
RU2319165C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2296341C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |


Изобретение может быть использовано в контрольно-измерительных системах для анализа загрузки поддиапазонов частот, определения местоположения источников радиоизлучения (ИРИ), измерения частотных и временных параметров радиосигналов. Достигаемый технический результат - расширение зоны радиомониторинга и повышение его эффективности. Технический результат достигается тем, что дополнительно используют R мобильных обслуживаемых постов радиоконтроля, R=1, 2, … и L необслуживаемых постов радиоконтроля на летно-подъемных средствах (ЛИС), L=1, 2, …, управляемых дистанционно через каналы связи центрального пункта управления или ближайшего пункта управления дополнительного контрольно-измерительного комплекса, оптимизируют пространственное размещение постов радиоконтроля, используют одноэтапную обработку результатов оценивания пространственно-информационных параметров сигналов контролируемых ИРИ, используют видеоизображения контролируемых ИРИ для уточнения их местоположения. Контрольно-измерительная система радиомониторинга содержит центральный контрольно-измерительный комплекс, в составе центрального пункта управления и не менее трех стационарных постов радиоконтроля, N дополнительных контрольно-измерительных комплексов аналогичной структуры, связанных между собой каналами связи центрального или дополнительного пунктов управления, R мобильных обслуживаемых постов радиоконтроля и L необслуживаемых постов радиоконтроля ЛПС, связанных каналами связи с центральным или ближайшим дополнительным пунктом управления. 1 з.п. ф-лы, 13 ил.
1. Контрольно-измерительная система радиомониторинга, содержащая центральный контрольно-измерительный комплекс, включающий центральный пункт управления с функциональным программным обеспечением, антенным устройством, коммутатором и контрольно-измерительным устройством и не менее трех пространственно разнесенных стационарных постов радиоконтроля, обслуживаемых дистанционно через каналы связи центрального пункта управления, и N дополнительных пространственно-разнесенных контрольно-измерительных комплексов, N=1, 2, …, каждый из которых содержит пункт управления и пространственно разнесенные стационарные посты радиоконтроля в количестве от 1 до М, обслуживаемые дистанционно через каналы связи центрального пункта управления или пунктов управления дополнительных контрольно-измерительных комплексов, в состав которых эти посты радиоконтроля входят; в состав каждого стационарного поста радиоконтроля входит антенное устройство, состоящее из двухлитерной пеленгаторной антенны, литеры которой размещены в два яруса, антенные элементы которых расположены по окружности, первого антенного коммутатора, информационные входы которого соединены с выходами антенных элементов обеих литеров пеленгаторной антенны, антенны связи, измерительной антенны и второго антенного коммутатора; и контрольно-измерительное устройство, предназначенное для приема и преобразования принимаемых сигналов, обработки полученной информации, запоминания результатов радиомониторинга и их передачи по каналам связи на центральный пункт управления или на соответствующий пункт управления дополнительного контрольно-измерительного комплекса, первый и второй информационные входы контрольно-измерительного устройства соединены с первым и вторым выходами первого антенного коммутатора соответственно, третий информационный вход соединен с выходом второго антенного коммутатора, четвертый информационный вход соединен с выходом антенны связи, пятый информационный вход соединен с выходом измерительной антенны, а первый и второй управляющие выходы соединены со входами управления первого и второго антенных коммутаторов соответственно, отличающаяся тем, что дополнительно введены R мобильных обслуживаемых постов радиоконтроля, R=1, 2, … и L необслуживаемых постов радиоконтроля на летно-подъемных средствах (ЛПС), L=1, 2, …, управляемых дистанционно через каналы связи центрального пункта управления или ближайшего пункта управления дополнительного контрольно-измерительного комплекса, а в антенное устройство каждого стационарного поста радиоконтроля дополнительно введены две антенны слухового контроля, выходы которых подключены ко входам второго антенного коммутатора, а третий управляющий выход контрольно-измерительного устройства подключен ко входу управления измерительной антенны.
2. Устройство по п.1, отличающееся тем, что мобильный пост радиоконтроля содержит антенное устройство, состоящее из пеленгаторной антенны, выполненной в одно- или двухлитерном исполнении, антенные элементы которых располагаются по окружности или эллипсу, первого антенного коммутатора, информационные входы которого соединены с выходами антенных элементов пеленгаторной антенны, антенны слухового контроля, первой ненаправленной антенны, последовательно соединенных второй ненаправленной антенны, второго антенного коммутатора и конвертора, антенны связи, антенны глобальной спутниковой системы местоопределения, последовательно соединенных опорно-поворотного устройства и измерительной антенны; последовательно соединенные контроллер и видеокамеру, предназначенные для уточнения местоположения контролируемых источников радиоизлучений (ИРИ), и контрольно-измерительное устройство, предназначенное для приема и преобразования принимаемых сигналов, обработки полученной информации, определения местоположения и ориентации транспортного средства мобильного поста радиоконтроля и передачи по каналам связи обработанной информации на центральный пункт управления или ближайший пункт управления дополнительного контрольно-измерительного комплекса, причем первый и второй информационные входы контрольно-измерительного устройства соединены с первым и вторым выходами первого антенного коммутатора соответственно, третий информационный вход соединен с выходом антенны слухового контроля, четвертый информационный вход соединен с выходом первой ненаправленной антенны, пятый информационный вход соединен со вторым выходом второго антенного коммутатора, шестой информационный вход соединен с выходом конвертора, седьмой вход соединен с выходом антенны связи, восьмой вход - с выходом антенны глобальной спутниковой системы местоопределения, девятый вход соединен с выходом измерительной антенны, а десятый вход - с информационным выходом контроллера, первый и второй выходы управления контрольно-измерительного устройства соединены со входами управления первого и второго антенных коммутаторов соответственно, третий выход управления соединен со входом управления контроллера, а четвертый выход управления - со входом управления опорно-поворотного устройства.
| КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА РАДИОМОНИТОРИНГА ОВЧ И УВЧ ДИАПАЗОНОВ "КУНИЦА" | 2007 |
|
RU2340914C1 |
| Способ изготовления синтетических олиф для печатных красок посредством обработки сланцевых масел | 1952 |
|
SU95204A1 |
| Ручной инструмент для удаления сучьев с древесных стволов | 1950 |
|
SU87265A1 |
| Способ защиты от окалины стальных деталей | 1948 |
|
SU77689A1 |
| US 5548822 A, 20.08.1996 | |||
| DE 10103552 A, 01.08.2002 | |||
| JP 2010034797 A, 12.02.2010 | |||
| БУМАГОДЕЛАТЕЛЬНОЙМАШИНЫ | 0 |
|
SU170001A1 |

