Заявляемые объекты объединены одним изобретательским замыслом, относятся к радиотехнике и могут быть использованы для контроля состояния и определения местоположения подвижного охраняемого объекта (ПОО).
Известен способ контроля состояния охраняемого объекта (см. Пат. РФ 2231126, МПК7 G08B 25/10, опубл. 20.06.2004 г.). В способе-аналоге на подготовительном этапе в базу данных центрального пункта контроля заносятся данные об истинном местоположении стационарных охраняемых объектов и отличительные признаки всех охраняемых объектов, при несанкционированном доступе в охраняемый объект или по команде его владельца активируют радиопередатчик, установленный на охраняемом объекте, формируют сигнал тревоги, включающий информацию об отличительных признаках охраняемого объекта, кодируют и излучают его. Принимают сигнал тревоги на М пеленгаторных пунктах, где М≥2, декодируют его. Выделяют информацию об отличительных признаках охраняемого объекта, идентифицируют их путем сравнения с занесенными в базу данных центрального пункта контроля отличительными признаками охраняемых объектов. Определяют его местоположение. Уточняют значения пеленгов путем калибровки пеленгаторов по сигналам от ближайших стационарных охраняемых объектов, на центральном пункте контроля вычисляют ошибки пеленгов, после чего рассчитывают уточненные пеленги на ПОО, излучающий сигнал тревоги. Рассчитывают уточненное местоположение ПОО.
В способе-аналоге, благодаря учету ошибок, полученных при измерении пеленгов на стационарные охраняемые объекты с известными координатами, достигается некоторое повышение точности местоопределения ПОО, излучающего сигнал тревоги, что в свою очередь, ведет к уменьшению времени его поиска.
Однако способу-аналогу присущ существенный недостаток - значительное время поиска ПОО. Данный недостаток является следствием относительно низкой точности местоопределения координат ПОО, излучающего сигнал тревоги. Одной из причин этого является реализованная в способе двухэтапная обработка результатов измерений. Кроме того, способ предполагает наличие большого количества стационарных охраняемых объектов, равномерно распределенных в зоне контроля, что в реальных условиях является не всегда реализуемо.
Известен способ контроля состояния охраняемого объекта (Пат. РФ №2370824, МПК G08B 25/10, опубл. 20.10.2009 г.).
В способе-аналоге предварительно в базу данных центрального пункта контроля заносят данные об истинном местоположении стационарных охраняемых объектах и отличительные признаки всех охраняемых объектов. Вычисляют количество N=S/S0 элементарных зон привязки, где S и S0 - соответственно площади зоны контроля и элементарной зоны привязки, а также определяют координаты местоположения центров элементарных зон привязки. Присваивают каждой элементарной зоне привязки порядковый номер n=1, 2, …, N. Рассчитывают для всех М стационарных пеленгаторных пунктов (СПП), антенная система каждого из которых включает R>2 антенных элементов, значения эталонных первичных пространственно-информационных параметров (ППИП) на выходах Amr-го антенного элемента, где m=1, 2, …, М; r=1, 2, …, R; относительно координат местоположения центров каждой элементарной зоны привязки, причем эталонные ППИП рассчитывают для средних частот спектров сигнала. При несанкционированном доступе в охраняемый объект или по команде его владельца активируют радиопередатчик, установленный на охраняемом объекте. Формируют сигнал тревоги, включающий информацию об отличительных признаках охраняемого объекта, кодируют и излучают сигнал тревоги. Принимают сигнал тревоги на m стационарных пеленгаторных пунктах, где m≥2, m∈М, декодируют сигнал тревоги, из которого выделяют информацию об отличительных признаках охраняемого объекта, идентифицируют их путем сравнения с предварительно занесенными в базу данных центрального пункта контроля отличительными признаками охраняемых объектов. Одновременно на m стационарных пеленгаторных пунктах определяют ППИП на выходах Amr-ных антенных элементов. Результаты измерений передают на центральный пункт контроля. Для каждой n-й элементарной зоны привязки вычисляют разность между эталонными и измеренными ППИП. Полученные результаты возводят в квадрат и суммируют. Выделяют из N полученных сумм Kn минимальную, а координаты местоположения центра элементарной зоны привязки, соответствующей минимальной сумме, принимают за координаты местоположения охраняемого объекта, подавшего сигнал тревоги. Направляют в выявленную элементарную зону привязки n оперативную группу для поиска ПОО. Уточняют перемещение оперативной группы в соответствии с направлением движения ПОО вплоть до его обнаружения.
В способе-аналоге обеспечивается сокращение времени поиска ПОО за счет повышения точности его местоопределения благодаря одноэтапной обработке результатов измерений ППИП.
Однако способу-аналогу также присущ недостаток. При приближении ПОО к границам зоны контроля падает точность его местоопределения, а за ее пределами отсутствует возможность отслеживания системой перемещения ПОО. Аналогичная ситуация может возникнуть при нахождении ПОО вблизи границы зоны контроля. Сигнал "Тревога" ПОО может быть принят ближайшими СПП или приемопередатчиками, однако определение его местоположения невозможно в силу названных причин. Увеличение количества стационарных пеленгаторных пунктов в этих условиях неэффективно из-за существенного роста финансовых затрат, усложнения процессов управления системой и т.д.
Наиболее близким по своей технической сущности к заявляемому является способ контроля состояния охраняемого объекта (Пат. РФ №2419162, МПК G08B 25/10, опубл. 20.03.2011 г.). В способе-прототипе предварительно в базу данных центрального пункта контроля заносят данные об истинном местоположении стационарных охраняемых объектов и отличительные признаки всех охраняемых объектов, вычисляют количество N=S/S0 элементарных зон привязки, где S и S0 - соответственно площади зоны контроля и элементарной зоны привязки, а также определяют координаты местоположения центров элементарных зон привязки, присваивают каждой элементарной зоне привязки порядковый номер n=1, 2, …, N, рассчитывают для всех М пеленгаторных пунктов М≥2, антенная система каждого из которых включает R>2 антенных элементов, значения эталонных первичных пространственно-информационных параметров на выходах каждого Amr-го антенного элемента, где m=1, 2, …, М; r=1, 2, …, R; относительно координат местоположения центров каждой элементарной зоны привязки, причем эталонные первичные пространственно-информационные параметры рассчитывают для средних частот спектра сигнала, при несанкционированном доступе в охраняемый объект или по команде его владельца активируют радиопередатчик, установленный на охраняемом объекте, формируют сигнал тревоги, включающий информацию об отличительных признаках охраняемого объекта, кодируют и излучают сигнал тревоги, принимают сигнал тревоги на m стационарных пеленгаторных пунктах, где m≥2, m∈М, декодируют сигнал тревоги, из которого выделяют информацию об отличительных признаках охраняемого объекта, идентифицируют их путем сравнения с предварительно занесенными в базу данных центрального пункта контроля отличительными признаками охраняемых объектов, одновременно на m стационарных пеленгаторных пунктах определяют первичные пространственно-информационные параметры на выходах Amr-ных антенных элементов, результаты измерений передают на центральный пункт контроля, для каждой n-й элементарной зоны привязки вычисляют разность между эталонными и измеренными первичными пространственно-информационными параметрами, полученные результаты возводят в квадрат и суммируют, выделяют из N полученных сумм Kn минимальную, а координаты местоположения центра элементарной зоны привязки, соответствующие минимальной сумме, принимают за координаты местоположения подвижного охраняемого объекта, подавшего сигнал тревоги, направляют в выявленную элементарную зону привязки n оперативную группу для поиска ПОО, уточняют перемещение оперативной группы в соответствии с направлением движения охраняемого объекта вплоть до его обнаружения, при приближении ПОО, подавшего сигнал тревоги, к границе контрольной зоны и выходе за ее пределы, на центральном пункте контроля формируют команду на подключение к работе М+1 пеленгаторного пункта, размещенного на летно-подъемном средстве (ЛПС), с помощью которого активируют в момент времени ti передатчик подвижного охраняемого объекта и измеряют задержку τij в приеме сигнала от него, где τij=tпр.i-tот.i-tm - время приема ответа, tот.i - время отправления запроса, tm - время, необходимое передатчику на обработку запроса и формирование ответа, определяют удаление dij - ПОО от пеленгаторного пункта
 ,
,
где с - скорость света, одновременно определяют местоположение M+1-го пеленгаторного пункта (Blps,Llps,Hlps)i, где Blps, Llps, Hlps - соответственно широта, долгота и высота ЛПС, углы крена  , тангажа
, тангажа  , курсового угла
, курсового угла  и склонения
и склонения  ЛПС пеленгаторного пункта, азимут θij и угол места βij на ПОО в системе координат антенной системы, а склонение
ЛПС пеленгаторного пункта, азимут θij и угол места βij на ПОО в системе координат антенной системы, а склонение  определяют как разность между путевым
определяют как разность между путевым  и курсовым
и курсовым  углами ЛПС, определяют предварительные координаты ПОО в момент времени ti
углами ЛПС, определяют предварительные координаты ПОО в момент времени ti  в левосторонней системе декартовых координат антенной системы, уточняют координаты ПОО
в левосторонней системе декартовых координат антенной системы, уточняют координаты ПОО  на основе априорно известной ориентации антенной системы относительно ЛПС (kant, lant, ζant) путем последовательного умножения
на основе априорно известной ориентации антенной системы относительно ЛПС (kant, lant, ζant) путем последовательного умножения  на три соответствующие углам Эйлера матрицы поворота, после чего определяют истинные геоцентрические координаты местоположения ПОО
на три соответствующие углам Эйлера матрицы поворота, после чего определяют истинные геоцентрические координаты местоположения ПОО  с учетом измеренных в момент времени ti пространственных углов ЛПС: крена
с учетом измеренных в момент времени ti пространственных углов ЛПС: крена  , тангажа
, тангажа  и склонения
и склонения  , широты
, широты  , долготы
, долготы  и высоты
и высоты  , после чего преобразуют истинные геоцентрические координаты
, после чего преобразуют истинные геоцентрические координаты  местоположения ПОО в географические координаты
местоположения ПОО в географические координаты  направляют оперативную группу в данную точку, уточняют перемещение оперативной группы и ЛПС в соответствии с направлением движения ПОО вплоть до его обнаружения.
направляют оперативную группу в данную точку, уточняют перемещение оперативной группы и ЛПС в соответствии с направлением движения ПОО вплоть до его обнаружения.
Способ-прототип обеспечивает эффективное отслеживание перемещений ПОО вне зоны контроля путем введения m+1 пеленгаторного пункта на ЛПС.
Однако способу-прототипу также присущи недостатки. К их числу можно отнести значительное время поиска ПОО, что является следствием недостаточной точности определения их координат стационарными пеленгаторными пунктами. Кроме того, совместное использование наземной компоненты системы (стационарных пеленгаторных пунктов) и воздушной (на ЛПС) приводит к значительным материальным затратам. При этом наземная компонента уступает воздушной по критерию "стоимость/эффективность".
Известно устройство контроля состояния охраняемого объекта (Пат. РФ №2370824, G08B 25/10, опубл. 20.10.2009 г.).
Устройство-аналог содержит центральный пункт контроля и М стационарных пеленгаторных пунктов, каждый из которых соединен с центральным пунктом контроля индивидуальным дуплексным каналом связи, Т приемопередатчиков, каждый из которых соединен с центральным пунктом контроля индивидуальным дуплексным каналом связи, L стационарных охраняемых объектов и Р подвижных охраняемых объектов, каждый из которых содержит комплект оборудования охранной сигнализации и радиостанцию.
Устройство обеспечивает сокращение времени поиска ПОО за счет повышения точности его местоопределения благодаря реализации одноэтапной обработки результатов измерений. Однако эффективность работы устройства вблизи границ зоны контроля падает.
Наиболее близким по своей технической сущности к заявляемому устройству контроля состояния охраняемого объекта является устройство по Пат. РФ №2419162, МПК G08B 25/10, опубл. 20.03.2011 г.
Устройство-прототип содержит центральный пункт контроля и М стационарных пеленгаторных пунктов, каждый из которых соединен с центральным пунктом контроля индивидуальным дуплексным каналом связи, Т приемопередатчиков, каждый из которых соединен с центральным пунктом контроля индивидуальным дуплексным каналом связи, L стационарных охраняемых объектов и Р подвижных охраняемых объектов, каждый из которых содержит комплект оборудования охранной сигнализации и радиостанцию, М+1-й подвижный пеленгаторный пункт на летно-подъемном средстве, который соединен дуплексным каналом с центральным пунктом контроля или ближайшим приемопередатчиком, при этом подвижный пеленгаторный пункт выполнен содержащим блок определения местоположения ЛПС (Blps, Llps, Hlps)i, измеритель пространственных параметров {θij, βij}, вычислитель, предназначенный для последовательного пересчета координат местоположения подвижного охраняемого объекта (ПОО) из одной системы координат в другую, блок угловой ориентации ЛПС (klps, llps, ζlps)i, блок управления, предназначенный для периодического формирования команды запроса "маячку" ПОО и анализа получаемого ответа, ведения базы данных, а также определения дальности до ПОО, приемную и передающую антенны, дуплексную радиостанцию, радиомодем и блок индикации, причем группа информационных входов измерителя пространственных параметров является входной установочной шиной М+1-го подвижного пеленгаторного пункта, а первая и вторая группы его информационных выходов соединены со второй и третьей группами информационных входов вычислителя, первая группа информационных входов которого соединена с группой информационных входов блока угловой ориентации ЛПС и группой информационных выходов блока определения местоположения ЛПС, пятая группа информационных входов вычислителя соединена с группой информационных выходов блока угловой ориентации ЛПС, а группа информационных выходов соединена с первой группой информационных входов блока управления и первой группой информационных входов блока индикации, вторая группа информационных входов которого соединена со второй группой информационных выходов блока управления, первая группа информационных выходов которого соединена с четвертой группой информационных входов вычислителя, а третий информационный выход соединен с первым информационным входом радиомодема, первый информационный выход которого соединен со вторым информационным входом блока управления, а второй информационный выход соединен с первым информационным входом дуплексной радиостанции, первый информационный выход которой соединен со вторым информационным входом радиомодема, второй информационный вход дуплексной радиостанции соединен с приемной антенной, а второй информационный выход соединен с передающей антенной.
Целью заявляемых технических решений является разработка способа и устройства контроля состояния охраняемого объекта, обеспечивающих сокращение временных затрат на поиск ПОО с одновременным уменьшением себестоимости системы.
Поставленная цель достигается тем, что в известном способе контроля состояния охраняемого объекта, заключающемся в том, что предварительно в базу данных центрального пункта контроля заносятся данные об истинном местоположении приемопередатчиков, стационарных охраняемых объектов и отличительные признаки всех охраняемых объектов, при несанкционированном доступе в охраняемый объект или по команде его владельца активируется радиопередатчик, установленный на охраняемом объекте, формируется сигнал тревоги, включающий информацию об отличительных признаках охраняемого объекта, кодируется и излучается сигнал тревоги, принимается сигнал тревоги ближайшими к объекту приемопередатчиками, ретранслируется сигнал тревоги на центральный пункт контроля совместно с данными о номере приемопередатчика, декодируется сигнал тревоги, из которого выделяют информацию об отличительных признаках охраняемого объекта, идентифицируют его путем сравнения с предварительно занесенными в базу данных центрального пункта контроля отличительными признаками охраняемых объектов, на центральном пункте контроля формируется команда на подключение к работе подвижного пеленгаторного пункта на летно-подъемном средстве, с помощью которого активируется в момент времени ti передатчик j-го подвижного охраняемого объекта и измеряется задержка τij в приеме сигнала от него, где τij=tпр.i-tот.i-tm - время приема ответа, tот.i - время отправления запроса, tm - время, необходимое передатчику на обработку запроса и формирование ответа, определяется удаление dij - ПОО от подвижного пеленгаторного пункта
 ,
,
где с - скорость света, одновременно определяется местоположение подвижного пеленгаторного пункта (Blps, Llps, Hlps)i, где Blps, Llps, Hlps соответственно широта, долгота и высота ЛПС, углы крена  , тангажа
, тангажа  , курсового угла
, курсового угла  и склонения
и склонения  ЛПС подвижного пеленгаторного пункта, азимут θij и угол места βij на ПОО в системе координат антенной системы, а склонение
ЛПС подвижного пеленгаторного пункта, азимут θij и угол места βij на ПОО в системе координат антенной системы, а склонение  определяется как разность между путевым
определяется как разность между путевым  и курсовым
и курсовым  углами ЛПС, определяются предварительные координаты ПОО в момент времени ti
углами ЛПС, определяются предварительные координаты ПОО в момент времени ti  в левосторонней системе декартовых координат антенной системы, уточняются координаты ПОО
в левосторонней системе декартовых координат антенной системы, уточняются координаты ПОО  на основе априорно известной ориентации антенной системы относительно борта ЛПС (kant, lant, ζant) путем последовательного умножения
на основе априорно известной ориентации антенной системы относительно борта ЛПС (kant, lant, ζant) путем последовательного умножения  на три соответствующие углам Эйлера матрицы поворота, после чего определяются истинные геоцентрические координаты местоположения ПОО
на три соответствующие углам Эйлера матрицы поворота, после чего определяются истинные геоцентрические координаты местоположения ПОО  с учетом измеренных в момент времени ti пространственных углов ЛПС: крена
с учетом измеренных в момент времени ti пространственных углов ЛПС: крена  , тангажа
, тангажа  и склонения
и склонения  , широты
, широты  , долготы
, долготы  и высоты
и высоты  , после чего преобразуются истинные геоцентрические координаты
, после чего преобразуются истинные геоцентрические координаты  местоположения ПОО в географические координаты
местоположения ПОО в географические координаты  направляется оперативная группа в данную точку, уточняется перемещение оперативной группы и ЛПС в соответствии с направлением движения ПОО вплоть до его обнаружения, на подготовительном этапе устанавливают видеокамеру под фюзеляжем ЛПС, а в процессе работы на центральном пункте контроля по координатам приемопередатчиков, принявших сигнал тревоги, определяют район вылета ЛПС, а после взлета ЛПС определяют удаление j-го ПОО относительно координат ЛПС по параллели dLij, меридиану dBij и перпендикуляру (высоте) dHij. Вычисляют предварительные значения азимутального угла
направляется оперативная группа в данную точку, уточняется перемещение оперативной группы и ЛПС в соответствии с направлением движения ПОО вплоть до его обнаружения, на подготовительном этапе устанавливают видеокамеру под фюзеляжем ЛПС, а в процессе работы на центральном пункте контроля по координатам приемопередатчиков, принявших сигнал тревоги, определяют район вылета ЛПС, а после взлета ЛПС определяют удаление j-го ПОО относительно координат ЛПС по параллели dLij, меридиану dBij и перпендикуляру (высоте) dHij. Вычисляют предварительные значения азимутального угла  и угла места
и угла места  настройки видеокамеры без учета пространственной ориентации ЛПС и видеокамеры. Преобразуют сферические координаты
настройки видеокамеры без учета пространственной ориентации ЛПС и видеокамеры. Преобразуют сферические координаты  и
и  j-го ПОО в нормальную систему координат
j-го ПОО в нормальную систему координат  и далее в систему координат видеокамеры
и далее в систему координат видеокамеры  с учетом пространственной ориентации ЛПС и видеокамеры. Определяют истинные значения азимутального угла θkj и угла места βkj ориентации видеокамеры на j-й ПОО. Одновременно оценивают угол закрытия корпусом ЛПС направления на j-й ПОО, а при выполнении условия βkj<0 ориентируют видеокамеру в соответствии с параметрами θkj и βkj. Уточняют местоположения ПОО с учетом привязки его видеоизображения к элементам рельефа местности, направляют оперативную группу в данную точку. Уточняют перемещение оперативной группы и ЛПС до момента задержания ПОО.
с учетом пространственной ориентации ЛПС и видеокамеры. Определяют истинные значения азимутального угла θkj и угла места βkj ориентации видеокамеры на j-й ПОО. Одновременно оценивают угол закрытия корпусом ЛПС направления на j-й ПОО, а при выполнении условия βkj<0 ориентируют видеокамеру в соответствии с параметрами θkj и βkj. Уточняют местоположения ПОО с учетом привязки его видеоизображения к элементам рельефа местности, направляют оперативную группу в данную точку. Уточняют перемещение оперативной группы и ЛПС до момента задержания ПОО.
Благодаря новой совокупности существенных признаков (введению на ЛПС видеокамеры в совокупности с операциями по ее наведению на ПОО с помощью бортового пеленгатора, а также исключению операций, связанных с недостаточно эффективной наземной компонентой местоопределения) в заявляемом способе достигается сокращение временных затрат на поиск объектов с одновременным уменьшением себестоимости системы.
В заявляемом устройстве контроля состояния охраняемого объекта поставленная цель достигается тем, что в известном устройстве, состоящем из центрального пункта контроля и Т приемопередатчиков, каждый из которых соединен с центральным пунктом контроля индивидуальным дуплексным каналом связи, L стационарных охраняемых объектов и Р подвижных охраняемых объектов, каждый из которых содержит комплект оборудования охранной сигнализации и радиостанцию, и подвижного пеленгаторного пункта на летно-подъемном средстве, который соединен дуплексным каналом связи с центральным пунктом контроля или ближайшим приемопередатчиком, при этом подвижный пеленгаторный пункт выполнен содержащим блок определения местоположения ЛПС (Blps, Llps, Hlps)i, измеритель пространственных параметров {θij, βij}, первый вычислитель, предназначенный для последовательного пересчета координат местоположения подвижного охраняемого объекта из одной системы координат в другую, блок угловой ориентации ЛПС (klps, llps, ζlps)i, блок управления, предназначенный для периодического формирования команды запроса "маячку" ПОО и анализа получаемого ответа, ведения базы данных, а также определения дальности до ПОО, приемную и передающую антенны, дуплексную радиостанцию, радиомодем и блок индикации, причем группа информационных входов измерителя пространственных параметров является первой установочной шиной подвижного пеленгаторного пункта, а первая и вторая группы его информационных выходов соединены со второй и третьей группами информационных входов первого вычислителя, первая группа информационных входов которого соединена с группой информационных входов блока угловой ориентации ЛПС и группой информационных выходов блока определения местоположения ЛПС, пятая группа информационных входов первого вычислителя соединена с группой информационных выходов блока угловой ориентации ЛПС, а группа информационных выходов соединена с первой группой информационных входов блока управления и первой группой информационных входов блока индикации, вторая группа информационных входов которого соединена со второй группой информационных выходов блока управления, первая группа информационных выходов которого соединена с четвертой группой информационных входов первого вычислителя, а третий информационный выход соединен с первым информационным входом радиомодема, первый информационный выход которого соединен со вторым информационным входом блока управления, а второй информационный выход соединен с первым информационным входом дуплексной радиостанции, первый информационный выход которой соединен со вторым информационным входом радиомодема, второй информационный вход дуплексной радиостанции соединен с приемной антенной, а второй информационный выход соединен с передающей антенной, отличающееся тем, что согласно изобретению дополнительно введены последовательно соединенные второй вычислитель, предназначенный для определения направления на ПОО  без учета пространственной ориентации ЛПС и видеокамеры, третий вычислитель, предназначенный для определения направления на ПОО
без учета пространственной ориентации ЛПС и видеокамеры, третий вычислитель, предназначенный для определения направления на ПОО  с учетом пространственной ориентации ЛПС и видеокамеры, контроллер видеокамеры, предназначенный для преобразования управляющего сигнала
с учетом пространственной ориентации ЛПС и видеокамеры, контроллер видеокамеры, предназначенный для преобразования управляющего сигнала  в соответствующее механическое воздействие на видеокамеру, и видеокамера, причем первая группа информационных входов второго вычислителя соединена с группой информационных выходов первого вычислителя, а вторая группа информационных входов - с группой информационных выходов блока определения местоположения ЛПС, вторая группа информационных входов третьего вычислителя соединена с группой информационных выходов блока угловой ориентации летно-подъемного средства, третья группа информационных входов является второй установочной шиной подвижного пеленгаторного пункта, а вход синхронизации объединен со входом синхронизации второго вычислителя и соединен с выходом синхронизации измерителя пространственных параметров.
в соответствующее механическое воздействие на видеокамеру, и видеокамера, причем первая группа информационных входов второго вычислителя соединена с группой информационных выходов первого вычислителя, а вторая группа информационных входов - с группой информационных выходов блока определения местоположения ЛПС, вторая группа информационных входов третьего вычислителя соединена с группой информационных выходов блока угловой ориентации летно-подъемного средства, третья группа информационных входов является второй установочной шиной подвижного пеленгаторного пункта, а вход синхронизации объединен со входом синхронизации второго вычислителя и соединен с выходом синхронизации измерителя пространственных параметров.
Перечисленная новая совокупность существенных признаков за счет того, что вводятся новые элементы и связи позволяет достичь цели изобретения: обеспечить сокращение временных затрат на поиск ПОО с одновременным уменьшением себестоимости системы.
Заявляемые способ и устройство поясняются чертежами, на которых показаны:
на фиг.1 - обобщенная структурная схема системы контроля состояния охраняемого объекта;
на фиг.2 - порядок определения района вылета ЛПС;
на фиг.3 - структурная схема подвижного пеленгаторного пункта;
на фиг.4 - алгоритм работы первого вычислителя;
на фиг.5 - алгоритм работы подвижного пеленгаторного пункта;
на фиг.6 - структурная схема измерителя пространственных параметров θij и βij;
на фиг.7 - структурная схема второго вычислителя;
на фиг.8 - алгоритм работы второго вычислителя;
на фиг.9 - структурная схема третьего вычислителя;
на фиг.10 - алгоритм работы третьего вычислителя;
на фиг.11 - алгоритм работы блока управления.
Одним из направлений повышения эффективности рассматриваемых систем является сокращение времени поиска ПОО. Последнее достигается, как правило, повышением точности местоопределения охраняемых объектов. Известные способы местоопределения источников радиоизлучений (ИРИ) с ЛПС предназначены, как правило, для определения координат излучателей. Однако точностные характеристики существующих измерителей зависят от многих факторов: полноты используемых параметров электромагнитного поля, соотношения сигнал/(помеха + шум), количества этапов обработки сигналов, взаимного пространственного размещения ЛПС и ПОО (ИРИ) и т.д. Эффективность существующих подходов в различных ситуациях отличается друг от друга и при этом достаточно низка. В предлагаемых способе и устройстве для решения названной проблемы предлагается комплексный подход: совместное использование бортового пеленгатора и управляемой им видеокамеры. Наведение видеокамеры осуществляют с использованием пространственных параметров ИРИ ПОО {θij, βij}, полученных от бортового пеленгатора в масштабе времени, близком к реальному. С этой целью координаты местоположения ИРИ ПОО, полученные подвижным пеленгаторным пунктом, необходимо преобразовать в пространственные параметры сигналов {θij, βij} с учетом текущего местоположения ЛПС и его пространственной ориентации, а также ориентации видеокамеры. В результате выполнения названных операций становится возможным уточнение местоположения ПОО путем анализа выделенного видеокамерой локального участка местности (визуально выполнить анализ по идентификации и точно определить местоположение контролируемого ПОО с учетом привязки к окружающим элементам рельефа местности).
Кроме того, сравнительный анализ наземной (подсистема местоопределения на базе стационарных пеленгаторов) и воздушной (на базе ЛПС) компонент показал следующее. Наземная компонента в городских условиях обладает ограниченными возможностями по точностным характеристикам местоопределения ПОО, доступности сигналов ПОО и т.д. По названным показателям подвижный пеленгатор на базе ЛПС превосходит наземную компоненту в силу специфики его применения (размещения в пространстве выше городских построек и возможности приближения к ПОО с постоянным уточнением пространственных параметров ИРИ ПОО θij и βij). Для начального наведения подвижного пеленгаторного пункта не требуется высокая точность определения местоположения ПОО. С этой функцией в состоянии справиться центральный пункт контроля в совокупности с приемопередатчиками. По местоположению приемопередатчиков, принявших сигнал тревоги, можно грубо определить район нахождения ПОО (см. фиг.2). В свете этого предлагается исключить из системы контроля стационарные пеленгаторные пункты, что влечет за собой существенное понижение ее себестоимости и амортизационных расходов.
В качестве ЛПС целесообразно использовать вертолет, малогабаритный самолет, беспилотный летательный аппарат и т.п.
Реализацию заявляемых способа и устройства целесообразно рассмотреть совместно на примере системе контроля состояния охраняемого объекта, приведенной на фиг.1, 2, 3 и 6.
Устройство контроля состояния охраняемого объекта, включающее центральный пункт контроля 3 и T приемопередатчиков 4.1-4.T, каждый из которых соединен с центральным пунктом контроля 3 индивидуальным дуплексным каналом связи, L стационарных охраняемых объектов 2.1-2.L и Р подвижных охраняемых объектов 1.1-1.Р, каждый из которых содержит комплект оборудования охранной сигнализации и радиостанцию, и подвижный пеленгаторный пункт 5 на летно-подъемном средстве, который соединен дуплексным каналом связи с центральным пунктом контроля 3 или ближайшим приемопередатчиком 4.1-4.T, при этом подвижный пеленгаторный пункт 5 выполнен содержащим блок определения местоположения ЛПС (Blps, Llps, Hlps), измеритель пространственных параметров {θij, βij} 7, первый вычислитель 8, предназначенный для последовательного пересчета координат местоположения подвижного охраняемого объекта из одной системы координат в другую, блок угловой ориентации ЛПС (klps, llps, ζlps) 9, блок управления 10, предназначенный для периодического формирования команды запроса "маячку" ПОО и анализа получаемого ответа, ведения базы данных, а также определения дальности до ПОО, приемную 11 и передающую 12 антенны, дуплексную радиостанцию 13, радиомодем 14 и блок индикации 15, причем группа информационных входов измерителя пространственных параметров 7 является первой установочной шиной 16 подвижного пеленгаторного пункта 5, а первая и вторая группы его информационных выходов соединены со второй и третьей группами информационных входов первого вычислителя 8, первая группа информационных входов которого соединена с группой информационных входов блока угловой ориентации ЛПС 9 и группой информационных выходов блока определения местоположения ЛПС 6, пятая группа информационных входов первого вычислителя 8 соединена с группой информационных выходов блока угловой ориентации ЛПС 9, а группа информационных выходов соединена с первой группой информационных входов блока управления 10 и первой группой информационных входов блока индикации 15, вторая группа информационных входов которого соединена со второй группой информационных выходов блока управления 10, первая группа информационных выходов которого соединена с четвертой группой информационных входов первого вычислителя 8, а третий информационный выход соединен с первым информационным входом радиомодема 14, первый информационный выход которого соединен со вторым информационным входом блока управления 10, а второй информационный выход соединен с первым информационным входом дуплексной радиостанции 13, первый информационный выход которой соединен со вторым информационным входом радиомодема 14, второй информационный вход дуплексной радиостанции 13 соединен с приемной антенной 14, а второй информационный выход соединен с передающей антенной 12.
Для сокращения временных затрат на поиск ПОО с одновременным уменьшением себестоимости системы в ней исключены стационарные пеленгаторы пункты, а в подвижный пеленгаторный пункт 5 дополнительно введены последовательно соединенные второй вычислитель 17, предназначенный для определения направления на ПОО  без учета углов ориентации ЛПС и видеокамеры, третий вычислитель 18, предназначенный для определения направления на ПОО
без учета углов ориентации ЛПС и видеокамеры, третий вычислитель 18, предназначенный для определения направления на ПОО  с учетом пространственной ориентации ЛПС и видеокамеры, контроллер видеокамеры 19, предназначенный для преобразования управляющего сигнала
с учетом пространственной ориентации ЛПС и видеокамеры, контроллер видеокамеры 19, предназначенный для преобразования управляющего сигнала  в соответствующее механическое воздействие на видеокамеру, и видеокамера 20, причем первая группа информационных входов второго вычислителя 17 соединена с группой информационных выходов первого вычислителя 8, а вторая группа информационных входов - с группой информационных выходов блока определения местоположения ЛПС 6, вторая группа информационных входов третьего вычислителя 18 соединена с группой информационных выходов блока угловой ориентации летно-подъемного средства 9, третья группа информационных входов является второй установочной шиной 21 подвижного пеленгаторного пункта 5, а вход синхронизации объединен со входом синхронизации второго вычислителя 17 и соединен с выходом синхронизации измерителя пространственных параметров 7.
в соответствующее механическое воздействие на видеокамеру, и видеокамера 20, причем первая группа информационных входов второго вычислителя 17 соединена с группой информационных выходов первого вычислителя 8, а вторая группа информационных входов - с группой информационных выходов блока определения местоположения ЛПС 6, вторая группа информационных входов третьего вычислителя 18 соединена с группой информационных выходов блока угловой ориентации летно-подъемного средства 9, третья группа информационных входов является второй установочной шиной 21 подвижного пеленгаторного пункта 5, а вход синхронизации объединен со входом синхронизации второго вычислителя 17 и соединен с выходом синхронизации измерителя пространственных параметров 7.
Каждый подвижный 1.1-1.P и стационарный 2.1-2.L охраняемый объект по аналогии с прототипом снабжается стандартным комплектом оборудования в составе: управляющего контроллера, группы из F датчиков охранной сигнализации, выходы которых подключены к входной шине управляющего контроллера, радиоприемника и радиопередатчика, антенного коммутатора и антенны с соответствующими связями (см. Пат. РФ №2419162, фиг.2). В управляющем контроллере предусмотрена входная шина для ввода исходных данных ("ключа") пользовательского комплекта и настройки оборудования. Для постановки объекта на охрану и снятия с нее используется внешний пульт управления. В стандартном комплекте оборудования предусмотрена возможность подключения кнопки "Угроза" к управляющему контроллеру. Последний может быть выполнен на микропроцессоре AT91SAM7S64, алгоритм работы которого приведен на фиг.4 Пат. РФ №2419162. Комплект оборудования ПОО по желанию заказчика может быть продублирован. В комплект оборудования всех охраняемых объектов входит автономное аварийное питание.
В предлагаемом способе по аналогии с прототипом для всех видов сигналов ("Тревога", "Угроза" или "Контроль") назначают два ключа. Последним ставятся в соответствие сигналы заданной формы, которые на подготовительном этапе вводятся в память управляющего контроллера и память центрального пункта контроля 3. Сигналы конкретного охраняемого объекта соответствуют введенным в базу данных пункта 3 отличительным признаком объекта. В качестве последних для ПОО могут быть использованы государственный номер, марка автомобиля, цвет, данные о владельце и т.д. Для стационарных охраняемых объектов дополнительно заносятся сведения об их истинном местоположении.
Каждое сообщение состоит из двух основных частей: преамбулы и передаваемых данных. В качестве преамбулы может быть выбрана М-последовательность, обладающая хорошими автокорреляционными свойствами. Длина последней зависит от достаточной помехозащищенности системы.
В свою очередь передаваемые данные содержат: идентификатор отправителя, идентификатор получателя, контрольную сумму CRC-16, октет, заполненную нулевыми битами. При передаче сообщения используется сверточное кодирование, кодирование Уолша, а в качестве модуляции - фазовая манипуляция BPSK на заданной центральной частоте. Прием сигналов от охраняемых объектов осуществляют с помощью Т приемопередатчиков 4.1-4.T с их последующей ретрансляцией на центральный пункт контроля 3. Независимо от вида сигнала, поступившего на центральный пункт контроля 3, его идентификация заключается в поиске в базе данных сигнала, идентичного принятому. Результаты сравнения однозначно указывают на вид принятого сигнала и на отличительные признаки охраняемого объекта, подавшего этот сигнал. Структура сигнала может отличаться от рассмотренной и зависит от выделенного частотного диапазона и количества пользователей системы.
На подготовительном этапе измеряют ориентацию антенной системы подвижного пеленгаторного пункта в трех плоскостях, принятых в авиации как крена kant, тангажа lant, курса αant или склонения ζant (kant, lant, ζant) относительно корпуса ЛПС. Значения (kant, lant, ζant) запоминают и в последующем используют для уточнения результатов измерений θij и βij. Под фюзеляжем ЛПС устанавливают видеокамеру. Совмещение центров антенной системы и видеокамеры не требуется в связи со значительным удалением ЛПС от ПОО.
В процессе работы системы владелец подвижного охраняемого объекта с пульта управления формирует сигнал на принятие объекта под охрану. При несанкционированном вскрытии подвижного объекта, находящегося под охраной, по сигналам одного или нескольких датчиков охранной сигнализации управляющий контроллер формирует, кодирует и излучает сигнал "Тревога". При обнаружении этого сигнала на пунктах 4 последние ретранслируют его на центральный пункт контроля 3. Здесь после его идентификации (сравнения с базой данных) и определения местоположения принявших его приемопередатчиков 4 принимается предварительное решение о возможном местоположении ПОО, подавшего сигнал тревоги (см. фиг.2). Центральным пунктом контроля 3 формируется команда подвижному пеленгаторному пункту 5 на вылет. Последний находится в состоянии постоянной готовности к полету и началу работы. Команда пункта 3 содержит информацию об отличительных ПОО, подавшего сигнал тревоги, ориентировочном районе его местоположения. По названной команде подвижный пеленгаторный пункт 5 вылетает в названный район и берет управление оперативной группой на себя.
В случае нажатия кнопки "Угроза" владельцем подвижного охраняемого объекта (например, при попытке насильственного захвата транспортного средства или угрозе жизни его владельцу) также формируют, кодируют и излучают сигнал "Тревога", по которому выполняются аналогичные операции.
При срабатывании одного или нескольких датчиков охранной сигнализации или при нажатии кнопки "Угроза" на стационарном охраняемом объекте 2 аналогично формируют, кодируют и излучают сигнал "Тревога". Последний достаточно принять хотя бы одним из пунктов 4. В этом случае нет необходимости решать задачу местоопределения объекта. После декодирования сигнала тревоги на центральном пункте контроля 3, выделения информации об отличительных признаках и их идентификации извлекают информацию о координатах стационарного охраняемого объекта. Далее пунктом 3 по данному адресу направляется оперативная группа.
В процессе полета подвижный пеленгаторный пункт 5 активирует передатчик ПОО (в момент времени ti). В результате становится возможным измерить задержку τij в приеме сигнала от ПОО
τij=tпр.i-tот.i-tm,
где tпр.i - время приема ответа, tот.i - время отправления запроса, tm - время, необходимое передатчику на обработку запроса и формирование ответа. Значение tm для используемого типа передатчика (маячка) является величиной постоянной и априорно известной. Данное обстоятельство позволяет с высокой точностью определить удаление dij ПОО от подвижного пеленгаторного пункта
 ,
,
где с - скорость света, а следовательно, и дает возможность эффективной (высокоточной) реализации угломерно-дальномерного способа местоопределения.
Одновременно в момент времени ti определяют местоположение в пространстве подвижного пеленгаторного пункта (Blps, Llps, Hlps), где Blps, Llps, Hlps соответственно широта, долгота и высота ЛПС. Данная функция может быть реализована с помощью GPS навигатора (см. GPS навигаторы 12, 12XL, 12CX. Руководство пользователя. E-mail: admin@connect.ru). Кроме того, определяют ориентацию ЛПС в данной точке (углы крена  , тангажа
, тангажа  и склонения
и склонения  ), а также азимут θj и угол места βj на ПОО в системе координат антенной системы (АС) пеленгатора (без учета ориентации АС относительно корпуса ЛПС и собственно ориентации ЛПС). Для измерения θij и βij возможно использование на борту ЛПС пеленгатора, который аналогичен пеленгаторам по Пат. РФ №2263327; 2341811.
), а также азимут θj и угол места βj на ПОО в системе координат антенной системы (АС) пеленгатора (без учета ориентации АС относительно корпуса ЛПС и собственно ориентации ЛПС). Для измерения θij и βij возможно использование на борту ЛПС пеленгатора, который аналогичен пеленгаторам по Пат. РФ №2263327; 2341811.
Результаты измерений фиксируют и на следующем этапе определяют предварительные координаты ПОО в момент времени ti
 в левосторонней системе декартовых координат антенной системы, где X0=dijsinβij, Y0=-dijcosβijcosθij, Z0=dijcosβijsinθij. Данную операцию можно интерпретировать следующим образом. По измеренному направлению {θij, βij} откладывают расстояние J и получают вектор - местоположение источника в системе координат АС. Для получения истинных географических координат ПОО необходимо учесть ориентацию АС пеленгатора относительно ЛПС и положение ЛПС в пространстве. Это достигается путем последовательного перехода из одной системы координат в другую, что удобнее и быстрее выполнять в декартовой системе координат.
в левосторонней системе декартовых координат антенной системы, где X0=dijsinβij, Y0=-dijcosβijcosθij, Z0=dijcosβijsinθij. Данную операцию можно интерпретировать следующим образом. По измеренному направлению {θij, βij} откладывают расстояние J и получают вектор - местоположение источника в системе координат АС. Для получения истинных географических координат ПОО необходимо учесть ориентацию АС пеленгатора относительно ЛПС и положение ЛПС в пространстве. Это достигается путем последовательного перехода из одной системы координат в другую, что удобнее и быстрее выполнять в декартовой системе координат.
В первом преобразовании уточняют априорно известную ориентацию АС относительно ЛПС (уточняют координаты ПОО). Коррекция  осуществляется в плоскости трех углов Эйлера и принятых в авиации как углы крена kant, тангажа lant и склонения ζant. Исходный вектор
осуществляется в плоскости трех углов Эйлера и принятых в авиации как углы крена kant, тангажа lant и склонения ζant. Исходный вектор  последовательно перемножают на три составляющие углам Эйлера матрицы поворота
последовательно перемножают на три составляющие углам Эйлера матрицы поворота

где
На следующем этапе осуществляется перевод вектора уточненных координат ПОО  в геоцентрическую систему координат. Это преобразование учитывает ориентацию ЛПС относительно земной поверхности и положение ЛПС в пространстве, что позволяет получить истинные геоцентрические координаты ПОО
в геоцентрическую систему координат. Это преобразование учитывает ориентацию ЛПС относительно земной поверхности и положение ЛПС в пространстве, что позволяет получить истинные геоцентрические координаты ПОО  Ориентация ЛПС обычно задается углами klps, llps и ζlps, которые определяются в каждой точке относительно плоскости, касательной к сферической модели земной поверхности. Ось крена лежит в этой плоскости и направлена на географический север, ось склонения перпендикулярна указанной плоскости и направлена к центру земли, ось тангажа лежит в указанной плоскости таким образом, что тройка осей составляет правую декартову систему координат. Полученный на предыдущем этапе вектор
Ориентация ЛПС обычно задается углами klps, llps и ζlps, которые определяются в каждой точке относительно плоскости, касательной к сферической модели земной поверхности. Ось крена лежит в этой плоскости и направлена на географический север, ось склонения перпендикулярна указанной плоскости и направлена к центру земли, ось тангажа лежит в указанной плоскости таким образом, что тройка осей составляет правую декартову систему координат. Полученный на предыдущем этапе вектор  расположен с некоторым поворотом, который зависит от широты и долготы местоположения ЛПС. Для окончательного перехода в геоцентрическую систему координат необходимо довернуть
расположен с некоторым поворотом, который зависит от широты и долготы местоположения ЛПС. Для окончательного перехода в геоцентрическую систему координат необходимо довернуть  на широту ЛПС Blps и
на широту ЛПС Blps и  минус долготу Llps, используя матрицы поворота, а затем перенести центр системы координат в центр земли, используя геоцентрические координаты ЛПС. В результате имеем
минус долготу Llps, используя матрицы поворота, а затем перенести центр системы координат в центр земли, используя геоцентрические координаты ЛПС. В результате имеем

где
 ,
,  ,
,  ,
,
Для удобства работы истинные геоцентрические координаты переводят в геоцентрические координаты ПОО  , где
, где

Завершение операции по определению координат ПОО позволяет перейти к следующему этапу - наведению видеокамеры на источник и прилегающую местность. Для точного наведения видеокамеры кроме координат ПОО необходимо знать ее исходную ориентацию относительно борта ЛПС: крен kk, тангаж lk и склонение ζk (эти параметры во время полета не меняются), координаты и ориентацию ЛПС на момент наведения видеокамеры: крен  тангаж
тангаж  и склонение
и склонение  (постоянно обновляемые данные). В результате необходимо перейти от координат ИРИ ПОО к азимуту
(постоянно обновляемые данные). В результате необходимо перейти от координат ИРИ ПОО к азимуту  и углу места
и углу места  направления на источник в системе координат видеокамеры.
направления на источник в системе координат видеокамеры.
Операции, выполняемые с этой целью, целесообразно разделить на два этапа. На первом из них определяют направление на ПОО  с ЛПС без учета углов ориентации (используют только координаты ЛПС и объекта). Вычисляют смещение j-го ПОО относительно ЛПС по трем координатам (в декартовой системе координат с ЛПС, находящимся в ее центре). Оси системы координат направлены следующим образом: по касательной к меридиану dBij, по касательной к параллели dLij и по перпендикуляру к земной поверхности dHij в метрах
с ЛПС без учета углов ориентации (используют только координаты ЛПС и объекта). Вычисляют смещение j-го ПОО относительно ЛПС по трем координатам (в декартовой системе координат с ЛПС, находящимся в ее центре). Оси системы координат направлены следующим образом: по касательной к меридиану dBij, по касательной к параллели dLij и по перпендикуляру к земной поверхности dHij в метрах



где Deq - длина экватора в метрах.
Зная указанные координаты, несложно определить (без учета ориентации ЛПС и видеокамеры) предварительные значения азимута  и угла места
и угла места  направления ориентации видеокамеры на j-й ПОО путем перевода полученных результатов в сферическую систему координат
направления ориентации видеокамеры на j-й ПОО путем перевода полученных результатов в сферическую систему координат


На очередном этапе на основе полученных результатов предварительно рассчитывают вектор  в нормальной системе координат, удобной к применению матриц поворота для углов ориентации
в нормальной системе координат, удобной к применению матриц поворота для углов ориентации  и
и 

Переход через эту систему координат продиктован тем, что в ней измеряются углы ориентации ЛПС. Получение вектора направления на j-й ПОО в нормальной системе координат также предпочтительно. Во-первых, вычисление угла места  возможно только в рассматриваемой системе координат, так как это фактически угол отклонения направления на ПОО от горизонтальной плоскости в точке нахождения ЛПС. Во-вторых, в этой системе координат удобно решать задачу определения точки пересечения вектора направления на ПОО с "круглой" Землей в силу того обстоятельства, что одна из осей системы координат направлена к центру Земли (см. Авиация: Энциклопедия. - М.: Большая Российская энциклопедия, 1994).
возможно только в рассматриваемой системе координат, так как это фактически угол отклонения направления на ПОО от горизонтальной плоскости в точке нахождения ЛПС. Во-вторых, в этой системе координат удобно решать задачу определения точки пересечения вектора направления на ПОО с "круглой" Землей в силу того обстоятельства, что одна из осей системы координат направлена к центру Земли (см. Авиация: Энциклопедия. - М.: Большая Российская энциклопедия, 1994).
В результате перемножения этого вектора на шесть матриц поворота в определенном порядке (по количеству учитываемых углов) получают вектор  соответствующий координатам j-го ПОО в системе координат видеокамеры
соответствующий координатам j-го ПОО в системе координат видеокамеры

где



φ - значение соответствующего пространственного параметра ЛПС или ПОО.
Перевод полученных координат в сферическую систему координат позволяет получить искомые углы направления на объект - азимут  и угол места
и угол места  , по которым осуществляют наведение видеокамеры
, по которым осуществляют наведение видеокамеры

 где
где 
На следующем этапе полученные результаты проверяют на предмет закрытия корпусом ЛПС направления на j-й ПОО. В случае  видеокамера выходит вверх за "свой" горизонт, а направление на источник закрыто корпусом ЛПС. Видеокамера на j-й ПОО не направляется и начинается новый цикл работы (см. фиг.4, 8, 10). При выполнении условия
видеокамера выходит вверх за "свой" горизонт, а направление на источник закрыто корпусом ЛПС. Видеокамера на j-й ПОО не направляется и начинается новый цикл работы (см. фиг.4, 8, 10). При выполнении условия  результаты измерений
результаты измерений  и
и  поступают на вход контроллера видеокамеры 19. Под управлением контроллера 19 осуществляют наведение видеокамеры 20 в соответствии с поступившими результатами.
поступают на вход контроллера видеокамеры 19. Под управлением контроллера 19 осуществляют наведение видеокамеры 20 в соответствии с поступившими результатами.
В процессе полета ЛПС значения  и
и  уточняются, а видеокамера 20 отслеживает местоположение ПОО.
уточняются, а видеокамера 20 отслеживает местоположение ПОО.
Предлагаемые способ и устройство контроля состояния охраняемого объекта реализованы и прошли апробацию на наземных стационарных стендах и далее на ЛПС. Выполненные эксперименты показали, что точность наведения видеокамеры на источник радиоизлучения ПОО в основном определяется точностью его местоопределения. При высокой достоверности определения координат ПОО на полученном видеоизображении интересующие объекты различимы, возможно проведение первичного анализа по их идентификации и привязка к окружающим элементам рельефа местности.
Реализация предлагаемого способа трудностей не вызывает. Основными элементами системы являются подвижный пеленгаторный пункт 5 (на ЛПС), центральный пункт контроля 3, дополненные средствами связи 4, с помощью которых по аналогии со способом-прототипом реализуют систему управления типа "Звезда" и грубое определение местоположения ПОО. С этой целью может использоваться радиосвязь типа RADIONET на частоте 2,4 ГГц или оптическое волокно. Индивидуальные комплекты оборудования подвижных и стационарных охраняемых объектов могут быть реализованы аналогично подобному оборудованию способа-прототипа (см. фиг.2 и 3). Подобной является и используемая структура сигналов, которая приведена выше. Более подробно этот вопрос освещен при рассмотрении работы подвижного пеленгаторного пункта 5.
Центральный пункт контроля 3 состоит из двух основных подсистем: подсистемы анализа и подсистемы управления.
В задачу первой из них входит формирование и ведение базы данных отличительных признаков стационарных и подвижных охраняемых объектов, текущий анализ поступающих сигналов "Угроза" и "Тревога", формирование сигналов "Контроль". Текущее управление всеми элементами системы (см. фиг.1) осуществляет вторая подсистема.
Данная работа, как правило, организуется на базе двух соответствующих постов:
формирования и ведения базы данных;
анализа и управления системой (в том числе наведение оперативной группы на стационарные охраняемые посты). Реализация постов трудностей не вызывает. Функционирование поста анализа и управления осуществляется в соответствии с алгоритмом, представленном в Пат. РФ 2419162, фиг.3.
Система местоопределения в заявляемых объектах предназначена для определения местоположения ПОО и наведения на них оперативной группы.
Основным элементом системы является подвижный пеленгаторный пункт (пункты)5.
Реализация подвижного пеленгаторного пункта 5, базирующегося на угломерно-дальномерном способе местоопределения, трудностей не вызывает. На фиг.3 приведена структурная схема подвижного пеленгаторного пункта 5, который содержит блок определения местоположения ЛПС 6, измеритель пространственных параметров 7, первый вычислитель 8, блок угловой ориентации ЛПС 9, блок управления 10, приемную и передающую антенны 11 и 12 соответственно, дуплексную радиостанцию 13, радиомодем 14, блок индикации 15, второй вычислитель 17, третий вычислитель 18, контроллер видеокамеры 19, видеокамеру 20.
Работа подвижного пеленгаторного пункта 5 осуществляется следующим образом (см. фиг.3-10). По команде центрального пункта контроля 3, поступившей через блоки 11, 13, 14, 10 на блок 15, носитель (ЛПС) пеленгаторного пункта 5 взлетает и направляется в заданный район. В команде пункта 3 содержится вся необходимая отличительная информация о ПОО, подавшем сигнал тревоги. При подлете к заданному квадрату блок управления 12 формирует команду запроса "маячка" заданного ПОО, которая проходит через блоки 14, 13 и 12 и излучается. Возможная структура команды запроса рассмотрена выше. Радиомаяк на ПОО, получив сигнал "Контроль", в течение интервала времени tm осуществляет его обработку и формирование ответа. После этого передатчик ПОО излучает ответный сигнал.
При приеме излучения ответного сигнала подвижный пеленгаторный пункт 5 измеряет следующие параметры:
задержку τij в приеме ответного сигнала с помощью блока 10;
пространственные параметры сигнала в θij и βij с помощью блока 7;
местоположения ЛПС (Blps, Llps, Hlps) с помощью блока 6;
пространственную ориентацию ЛПС (klps, llps, ζlps) с помощью блока 9.
Основная идея в высокоточном определении дальности dij до ПОО лежит в реализации синхронного канала "контроль-ответ" с априорно известными частотой дискретизации сигнала и временем задержки в "маячке" tm. Для измерения задержки τij целесообразно использовать временные отсчеты сигнала. Для повышения точности определения τij на стороне подвижного пеленгаторного пункта 5 применяют удвоение частоты дискретизации. Формирование сигнала "Контроль" осуществляют блоком управления 10, который через блоки 14, 13 и 12 излучают его в эфир. Прием ответа от "маячка" ПОО блоком 10 может осуществляться двумя путями: через блоки 7 и 8 или 11, 13 и 14. Измерение задержки τij и пересчет в dij также осуществляет блок 10. Результаты измерений d поступают в первый вычислитель 8.
В функции первого вычислителя 8 на первом этапе входит определение координат ПОО  в левосторонней системе декартовых координат антенной системы измерителя (1). Для реализации этой функции на первую группу информационных входов блока 8 поступает значение θij, на вторую группу информационных входов - βij (с выходов блока 7), а на третью группу информационных входов - значение высоты ЛПС
в левосторонней системе декартовых координат антенной системы измерителя (1). Для реализации этой функции на первую группу информационных входов блока 8 поступает значение θij, на вторую группу информационных входов - βij (с выходов блока 7), а на третью группу информационных входов - значение высоты ЛПС  с группы информационных выходов блока определения местоположения ЛПС 6.
с группы информационных выходов блока определения местоположения ЛПС 6.
Результаты предварительного определения координат ПОО  далее блоком 8 используются на втором этапе его работы. На их основе уточняют предварительные координаты
далее блоком 8 используются на втором этапе его работы. На их основе уточняют предварительные координаты  с использованием априорно известной ориентации антенной системы измерителя относительно борта ЛПС. Вектор уточненных координат
с использованием априорно известной ориентации антенной системы измерителя относительно борта ЛПС. Вектор уточненных координат  определяют путем последовательного умножения
определяют путем последовательного умножения  на три соответствующие углам Эйлера матрицы поворота в соответствии с (1).
на три соответствующие углам Эйлера матрицы поворота в соответствии с (1).
Далее значение уточненных координат  используют на третьем этапе работы блока 8. В функции данного этапа входит определение истинных геоцентрических координат местоположения ПОО
используют на третьем этапе работы блока 8. В функции данного этапа входит определение истинных геоцентрических координат местоположения ПОО  с учетом измеренных в момент времени ti пространственных углов ЛПС: крена klpsi, тангажа llpsi и склонения ζlpsi; широты Blpsi, долготы Llpsi и высоты Hlpsi его местоположения. С этой целью на вторую группу информационных входов блока 8 с первой группы выходов блока 6 поступают данные о пространственном местоположении ЛПС (Blps, Llps, Hlps)i. На третью группу информационных входов блока 8 с информационных выходов блока угловой ориентации ЛПС 9 подаются значения углов (klps, llps, ζlps)i, характеризирующие ориентацию ЛПС в пространстве в момент измерения заявляемым устройством параметров ПОО {θ,β}j. Определение истинных геоцентрических координат
с учетом измеренных в момент времени ti пространственных углов ЛПС: крена klpsi, тангажа llpsi и склонения ζlpsi; широты Blpsi, долготы Llpsi и высоты Hlpsi его местоположения. С этой целью на вторую группу информационных входов блока 8 с первой группы выходов блока 6 поступают данные о пространственном местоположении ЛПС (Blps, Llps, Hlps)i. На третью группу информационных входов блока 8 с информационных выходов блока угловой ориентации ЛПС 9 подаются значения углов (klps, llps, ζlps)i, характеризирующие ориентацию ЛПС в пространстве в момент измерения заявляемым устройством параметров ПОО {θ,β}j. Определение истинных геоцентрических координат  в блоке 8 выполняют в соответствии с выражением (2). Следует отметить, что информация о пространственном положении ЛПС (Blps, Llps, Hlps)i используется блоком 9 для нахождения угловой ориентации ЛПС (klps, llps, ζlps)i. По этой причине она поступает с группы информационных выходов блока 6 на информационные входы блока 9.
в блоке 8 выполняют в соответствии с выражением (2). Следует отметить, что информация о пространственном положении ЛПС (Blps, Llps, Hlps)i используется блоком 9 для нахождения угловой ориентации ЛПС (klps, llps, ζlps)i. По этой причине она поступает с группы информационных выходов блока 6 на информационные входы блока 9.
В связи с тем, что использование геоцентрических координат на практике затруднено, первым вычислителем 8 на завершающем этапе осуществляют преобразование истинных геоцентрических координат ПОО  в географические
в географические  в соответствии с выражением (3).
в соответствии с выражением (3).
В функции блоков 17 и 18 входит преобразование измеренных координат j-го ПОО (B, L, H)j в значение азимута  и угла места
и угла места  , с помощью которых становится возможным наведение видеокамеры 20 на излучатель. Точное наведение видеокамеры 20 дополнительно предполагает знание ее ориентации в исходном состоянии относительно борта ЛПС: углов крена kk, тангажа lk и склонения ζk, координат (Blps, Llps, Hlps)i и пространственной ориентации ЛПС на i-й момент наведения ti видеокамеры 20 (klps, llps, ζlps)i. Место размещение видеокамеры 20 не зависит от местоположения пеленгаторной АС в силу значительного удаления ПОО от ЛПС и, как правило, выбирается под фюзеляжем носителя. Параметры начальной установки видеокамеры 20 (kk, lk, ζk) измеряются на подготовительном этапе и вводятся по второй установочной шине 21, а в процессе полета остаются неизменными. Координаты ЛПС и его пространственная ориентация в процессе полета постоянно обновляются с помощью блоков 6 и 9 соответственно.
, с помощью которых становится возможным наведение видеокамеры 20 на излучатель. Точное наведение видеокамеры 20 дополнительно предполагает знание ее ориентации в исходном состоянии относительно борта ЛПС: углов крена kk, тангажа lk и склонения ζk, координат (Blps, Llps, Hlps)i и пространственной ориентации ЛПС на i-й момент наведения ti видеокамеры 20 (klps, llps, ζlps)i. Место размещение видеокамеры 20 не зависит от местоположения пеленгаторной АС в силу значительного удаления ПОО от ЛПС и, как правило, выбирается под фюзеляжем носителя. Параметры начальной установки видеокамеры 20 (kk, lk, ζk) измеряются на подготовительном этапе и вводятся по второй установочной шине 21, а в процессе полета остаются неизменными. Координаты ЛПС и его пространственная ориентация в процессе полета постоянно обновляются с помощью блоков 6 и 9 соответственно.
Преобразование измеренных координат j-го ПОО в его пространственное направление выполняется в два этапа. На первом из них определяют направление на ПОО  с ЛПС без учета углов ориентации его и видеокамеры 20. Данную функцию выполняет второй вычислитель 17 в соответствии с выражениями 4-8. С этой целью на его первую группу информационных входов поступают координаты j-го ПОО (B, L, H)j. На второй группе информационных входов присутствуют координаты ЛПС (Blps, Llps, Hlps)i в i-й момент времени. В результате на выходе блока 17 формируют предварительные значения азимута
с ЛПС без учета углов ориентации его и видеокамеры 20. Данную функцию выполняет второй вычислитель 17 в соответствии с выражениями 4-8. С этой целью на его первую группу информационных входов поступают координаты j-го ПОО (B, L, H)j. На второй группе информационных входов присутствуют координаты ЛПС (Blps, Llps, Hlps)i в i-й момент времени. В результате на выходе блока 17 формируют предварительные значения азимута  и угла места
и угла места  направления на объект путем перевода полученных результатов из декартовой системы координат в сферическую.
направления на объект путем перевода полученных результатов из декартовой системы координат в сферическую.
С помощью третьего вычислителя 18 учитывают ориентацию видеокамеры 20 относительно борта ЛПС, а также пространственную ориентацию собственно ЛПС в соответствии с выражениями 9-12. Для этого на первую группу информационных входов блока 18 подают предварительные значения  и
и  направления на j-й ПОО. На вторую группу информационных входов поступают значения (klps, llps, ζlps)i с группы информационных выходов блока 9. По второй установочной шине 21 на третью группу информационных входов поступают значения (kk, lk, ζk)i о начальной установке видеокамеры 20. В результате блок 18 определяет искомые углы направления на j-й ПОО
направления на j-й ПОО. На вторую группу информационных входов поступают значения (klps, llps, ζlps)i с группы информационных выходов блока 9. По второй установочной шине 21 на третью группу информационных входов поступают значения (kk, lk, ζk)i о начальной установке видеокамеры 20. В результате блок 18 определяет искомые углы направления на j-й ПОО  .
.
Кроме того, в функцию блока 18 входит операция по определению степени затемнения направления на j-й ПОО корпусом ЛПС. В случае  результаты измерений
результаты измерений  на выход блока 18 не поступают и перестройка видеокамеры 20 не осуществляется.
на выход блока 18 не поступают и перестройка видеокамеры 20 не осуществляется.
В случае выполнения неравенства  измеренные значения
измеренные значения  направления на j-й ПОО поступают на вход контроллера видеокамеры 19. В функции последнего входит преобразование входного управляющего сигнала
направления на j-й ПОО поступают на вход контроллера видеокамеры 19. В функции последнего входит преобразование входного управляющего сигнала  в механическое воздействие на видеокамеру 20 по ее соответствующей перестройке.
в механическое воздействие на видеокамеру 20 по ее соответствующей перестройке.
Синхронизацию работы блоков 17 и 18 осуществляют импульсы генератора 33 блока 7 (см. фиг.3 и 6).
Измерение пространственных параметров сигнала передатчика ПОО осуществляют с помощью блока 7. Последний представляет из себя фазовый интерферометр, аналогичный фазовому интерферометру стационарного пеленгаторного пункта (см. Пат. РФ 2341811, 2423714), дополненный преобразователем ППИП в пространственные параметры θij и βij (см. фиг. 6).
Блок 7 содержит измеритель первичных пространственно-информационных параметров 24 (фиг.6), первое, второе и третье запоминающие устройства 23, 25, 29 соответственно, блок формирования эталонных значений разностей фаз ∆φl,h,эт(fν) 22, блок вычитания 26, умножитель 27, сумматор 28, блок определения азимута и угла места 30, входную установочную шину 16, первую 31 и вторую 32 группы информационных выходов, генератор синхроимпульсов 33.
На подготовительном этапе рассчитывают значения эталонных ППИП для используемых системой частот. Для этой цели вводят топологию антенной системы подвижного пеленгаторного пункта 5. Данные по топологии включают значения взаимных расстояний между антенными элементами решетки и ее ориентацию относительно оси симметрии борта ЛПС. Для этой цели возможно использование вектора, проходящего от второго антенного элемента в направлении первого антенного элемента (при кольцевой структуре антенной решетки и размещении последней под фюзеляжем ЛПС).
В процессе расчета эталонных ППИП моделируют размещение эталонного источника поочередно вокруг антенной решетки с дискретностью ∆θe и ∆βp на удалении нескольких длин волн. При этом полагают, что фронт приходящей волны плоский. Для каждого из угловых параметров ∆θe, e=1, 2, …, E и ∆βp, p=1, 2, …, Р; вычисляют значения разностей фаз ∆φl,h,эт(fν) для всех возможных комбинаций пар антенных элементов решетки и всех используемых частот ν

где

расстояние между плоскими фронтами волн в l-м и h-м антенных элементах, пришедшие к решетки под углами ∆θe в азимутальной и ∆βp в угломестной плоскостях, l≠h, Xl, Yl, Zl и Xh, Yh, Zh координаты l-го и h-го антенных элементов решетки. В случае использования антенной решетки с плоским размещением антенных элементов Zl=Zh последнее выражение принимает вид

Полученные блоком 22 результаты измерений эталонных значений ППИП ∆φl,h,эт(fν) оформляют в виде эталонного массива данных.
При приеме ответного сигнала от ПОО на заданной частоте ν в блоке 24 формируют массив измеренных ППИП ∆φl,h,изм(fν), структура представления информации в котором аналогична выше рассмотренной. Для этого все измеренные значения ∆φl,h,изм(fν) для всех сочетаний пар антенных элементов Al,h для частоты ν оформляют в массив ППИП. Последовательно для всех направлений ∆θe, е=1, 2, …, Е, и всех углов места ∆βp, р=1, 2, …, Р, вычисляют разность между эталонными ∆φl,h,эт(fν) и измеренными ∆φl,h,изм(fν) ППИП (в блоке 26), которые возводят в квадрат (блок 27) и суммируют (блок 28) в соответствии с выражением

Для каждого направления θe формируется вектор-столбец Kθ,β(fν) размерностью Р из соответствующих значений Kθ,β(fν). Определение наиболее вероятного направления прихода радиосигнала в горизонтальной и угломестной плоскостях осуществляют путем поиска наименьшей суммы Kθ,β(fν) с помощью блока 30. На информационных выходах блока 30 формируют значения пространственных параметров сигнала ∆θe и ∆βp в системе координат антенной решетки. Генератор синхроимпульсов 33 обеспечивает синхронную работу всех элементов блока 7.
Реализация элементов блока 7 известна и трудностей не вызывает. Блок измерения первичных пространственно-информационных параметров 24 выполняют по схеме, аналогичной стационарным пеленгаторным пунктам (см. Пат. РФ №2341811).
Первое, второе и третье запоминающие устройства 23, 25, и 29 соответственно представляют из себя буферные запоминающие устройства (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю.Гордеев и др. - М.: Радио и связь, 1990. - 288 с.).
Блок вычитания 26 и сумматор 28 реализуют по известной схеме (см. Рэд Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Радио и связь, 1990. - 256 с.).
Умножитель 27 реализует операцию возведение в квадрат, а его выполнение освещено в книге Рэд Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Радио и связь, 1990. - 256 с.
Блок формирования эталонного набора первичных пространственно-информационных параметров 22 предназначен для создания таблиц эталонных значений разностей фаз ∆φl,h,эт(fν) различных пар антенных элементов l, h=1, 2, …, R; l≠h; заданных часто V, и различных направлений прихода сигнала с заданной дискретностью ∆θe, и ∆βp, е=1, 2, …, Е; Е·∆θe=2π, р=1, 2, …, Р, Р·∆βp=π. На подготовительном этапе по первой установочной шине 16 задают следующие исходные данные:
сектор обработки по азимуту {θmin, θmax};
сектор обработки по углу места {βmin, βmax};
точность нахождения углового параметра ∆θe;
точность нахождения угломестного параметра ∆βp;
топологию размещения антенных элементов {dl,h};
разнос антенных элементов в вертикальной плоскости {Zl,h};
номиналы используемых частот fν и ширину спектра сигнала ∆fν.
Величины и {βmin, βmax} зависят от местоположения антенной решетки относительно борта ЛПС. Точность нахождения угломерных параметров ∆θe и ∆βp определяются, в конечном счете, заданной точностью местоопределения. Задача блока 22 состоит в том, чтобы для данного пеленгатора, заданных частот fν и заданной топологии антенной решетки с дискретностью по азимуту ∆θe и углу места ∆βp рассчитать идеальные (эталонные) значения разностей фаз для всех возможных пар антенных элементов ∆φl,h,эт(fν).
Блок 22 может быть выполнен в виде автомата на базе высокопроизводительного 16-разрядного микропроцессора К1810ВМ86 (см. Вениаминов В.Н. и др. Микросхемы и их применение: Справочное пособие - 3-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512 с.).
Реализация блока определения азимута и угла места 30 известна и широко освещена в литературе. Блок 30 предназначен для определения минимальной суммы квадратов невязок (см. выражение 16). Блок 30 может быть реализован по пирамидной схеме с использованием быстродействующих компараторов (см. Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд. перераб. и доп. - М.: Радио и связь. 1990. - 512 с.).
Блок определения местоположения 6 предназначен для измерения широты βlpsi, долготы Llpsi и высоты Hlpsi нахождения ЛПС в момент времени ti (момент измерения всех основных параметров ЛПС и ПОО). Данная функция может быть реализована с помощью GPS навигатора (см. GPS навигаторы 12, 12XL, 12СХ. Руководство пользователя. E-mail: admin@connect.ru).
Блок угловой ориентации 9 предназначен для определения в момент выполнения измерений ti угловой ориентации ЛПС: углов крена klpsi, тангажа llpsi, и склонения ζlpsi. Реализация блока 9 известна и широко освещена в литературе (см. Пат. РФ 2371733, МПК G01S 5/10. Способ определения угловой ориентации летательных аппаратов. Опубл. 27.10.2009; Пат. РФ 2374659, МПК7 G01S 5/00, 5/02. Способ и устройство определения угловой ориентации летательных аппаратов. Опубл. 27.11.2009).
Первый вычислитель 8 предназначен для последовательного пересчета координат ПОО из системы координат антенной системы через координаты ЛПС, систему геоцентрических координат в географические координаты (см. фиг.4). На четвертую группу информационных входов с выходов блока 8 поступают значения дальности до ПОО dij. На вторую и третью группы информационных входов блока 8 приходят результаты измерения пространственных параметров сигнала ПОО θij и βij, полученные блоком 7. На первую группу информационных входов блока 8 поступает информация о местоположении ЛПС в момент времени ti (Blps, Llps, Hlps)i. На пятую группу информационных входов блока 8 приходят результаты измерений (выполненных в момент времени ti) угловой ориентации ЛПС (klps, llps, ζlps)i с выходов блока 9. По данным, полученными блоками 10, 7, 6 и 9, вычислитель 8 последовательно выполняет операции в соответствии с выражениями 1, 2 и 3.
Реализации блока трудностей не вызывает. Блок 8 может быть выполнен на базе специализированного микропроцессора TMS320c6416, алгоритм работы которого представлен на фиг.4.
Блок управления 10 предназначен для выделения управляющей информации, поступающей из центрального пункта контроля 3 путем ее демодуляции, декодирования и идентификации информационной части, ее запоминания (осуществляет ведение базы данных с отличительными признаками ПОО, поиск и сопровождение которого поручено подвижному пеленгаторному пункту 5), периодическое формирование этому ПОО сигнала "Контроль", получение ответа от ПОО, измерение временного интервала τij между этими сигналами, определение дальности dij до ПОО, по результатам местоопределения ПОО (в блоках 8 и 20) осуществляют формирование команд управления на перемещение оперативной группе, формирование информационного блока по результатам работы для пункта 3.
Реализация блока 10 трудностей не вызывает. Блок управления 10 может быть реализован на микропроцессоре TMS320c6416 совместно с блоком 8. Алгоритм работы блока приведен на фиг.11.
Дуплексную радиостанцию 13 и модем 14 реализуют с помощью изделий IC-F310S фирмы ICOM и Kantronics КРС-3 Plus соответственно.
Реализация блока индикации 15 известна и трудностей не вызывает (см. Быстров А.Ю. и др. Сто схем с индикаторами / Быстров А.Ю. и др. - М.: Радио и связь, 1998. - 128 с.). В качестве блока 15 может быть использован монитор, например SyncMaster 940n.
Вычислители 17 и 18 предназначены для преобразования измеренных координат (B,L,H)j в значения азимута  и угла места
и угла места  направления на j-й ИРИ.
направления на j-й ИРИ.
Вариант реализации блока 17 приведен на фиг.7, алгоритм его функционирования - на фиг.8. Второй вычислитель 17 содержит первый, второй и третий блоки вычитания 34, 35 и 37 соответственно, первый и второй блоки памяти 36 и 40 соответственно, первый, второй, третий, четвертый и пятый умножители 38, 41, 42, 43 и 44 соответственно, блок вычисления cos-функции 39, сумматор 45, блок извлечения квадратного корня 46, первый и второй блоки вычисления arctg-функции 47 и 48 соответственно. С помощью названных блоков реализуются выражения 4-8. Блоки 36 и 40 содержат значения констант π/180 и Deq/360 соответственно.
Синхронность выполнения операций обеспечивается импульсами генератора 33 блока 7. Реализация блоков 34-48 трудностей не вызывает. Могут быть реализованы на микросхемах ТТЛ-логики.
Реализация блока 18 приведена на фиг.9, а алгоритм его функционирования на фиг.10. Третий вычислитель 18 содержит первый и второй блоки вычисления sin-функции 49 и 52 соответственно, первый и второй блоки вычисления cos-функции 50 и 51 соответственно, первый 53, второй 54, третий 58, четвертый 60, пятый 62, шестой 64, седьмой 66 и восьмой 68 умножители, первый и второй инверторы 55 и 74 соответственно, сумматор 56, первый 57, второй 59, третий 61, четвертый 63, пятый 65 и шестой 67 блоки формирования матриц поворота, соответствующих параметрам klps, llps, ζlps, kk, lk, ζk, разветвитель 69, блок вычисления модулей 70, делитель 71, блок вычисления arctg-функции 72 и блок вычисления arcsin-функции 73. С помощью названных блоков реализуют выражения 9-12. Блоки с 57 по 67 выполняют на микросхемах перепрограммируемых постоянных запоминающих устройств. Причем блоки 57 и 63 соответствуют матрицам поворота A1(φ), 59 и 65 - матрицам поворота A2(φ), а блоки 61 и 67 - матрицам поворота A3(φ) (см. выражение 11). В микросхемах памяти этих блоков на постоянной основе заносятся функционалы и константы в соответствии с (11). В качестве переменных величин φ выступают значения klps, llps, ζlps и kk, lk, ζk. Последние заносятся в блоки 57, 59 и 61 перед началом работы по второй установочной шине 21 и остаются неизменными. В функции сумматора 56 входит объединение значений Х2, Y2, Z2 (формирование вектора  выражение 9). Разветвитель 69 выполняет обратную функцию, на его выходах раздельно присутствуют значения Х1, Y1, Z1 вектора
выражение 9). Разветвитель 69 выполняет обратную функцию, на его выходах раздельно присутствуют значения Х1, Y1, Z1 вектора  (выражение 10). В функции
(выражение 10). В функции
блока 70 входит нахождение модуля (нормы длины) вектора  Эта функция выполняется в соответствии с известным выражением
Эта функция выполняется в соответствии с известным выражением

Реализация всех названных элементов третьего вычислителя 18 известна, могут быть выполнены на элементарной логики микросхем ТТЛ-серии. Для уменьшения массогабаритных характеристик, потребляемого тока блоки 17, 18 целесообразно реализовать на специализированном микропроцессоре TMS320c6416 (см. TMS320c6416: http://focus/ti/com/docs/prod/folders/print/TMS320c6416.html), совместно с блоками 8 и 10.
Кроме того, блоки 8, 10, 17 и 18 могут быть реализованы на ПЭВМ. В качестве основных требований можно отметить следующее: процессор Pentium 300 МГц, 128 МБ оперативной памяти, 25 МБ свободного пространства на жестком диске. Программная составляющая: операционная система Windows XP SP2 и выше, библиотека. NetFrameWork 3.5.
Блоки 19 и 20 могут быть реализованы в одном серийно выпускаемом изделии. В экспериментах использовалась роботизированная скоростная купольная камера "SpeedDome Ultra 8" (серия 35х). Видеокамера имеет монтажное основание, защищенный корпус, 35-кратное оптическое масштабирование, непрерывную автофокусировку, EIS (электронный стабилизатор изображения), высокую скорость поворота (до 360º/с), управляется через протокол RS-422.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2009 |
|
RU2419162C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2012 |
|
RU2513900C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2458360C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2022 |
|
RU2812755C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2008 |
|
RU2370824C1 |
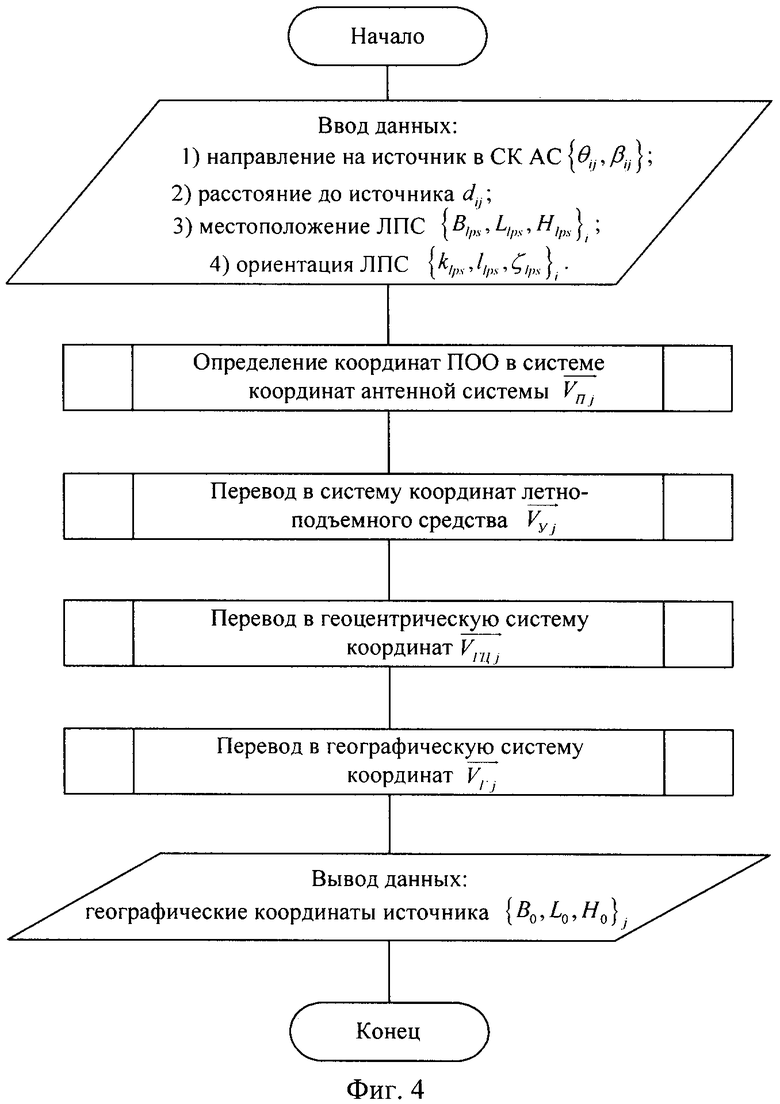
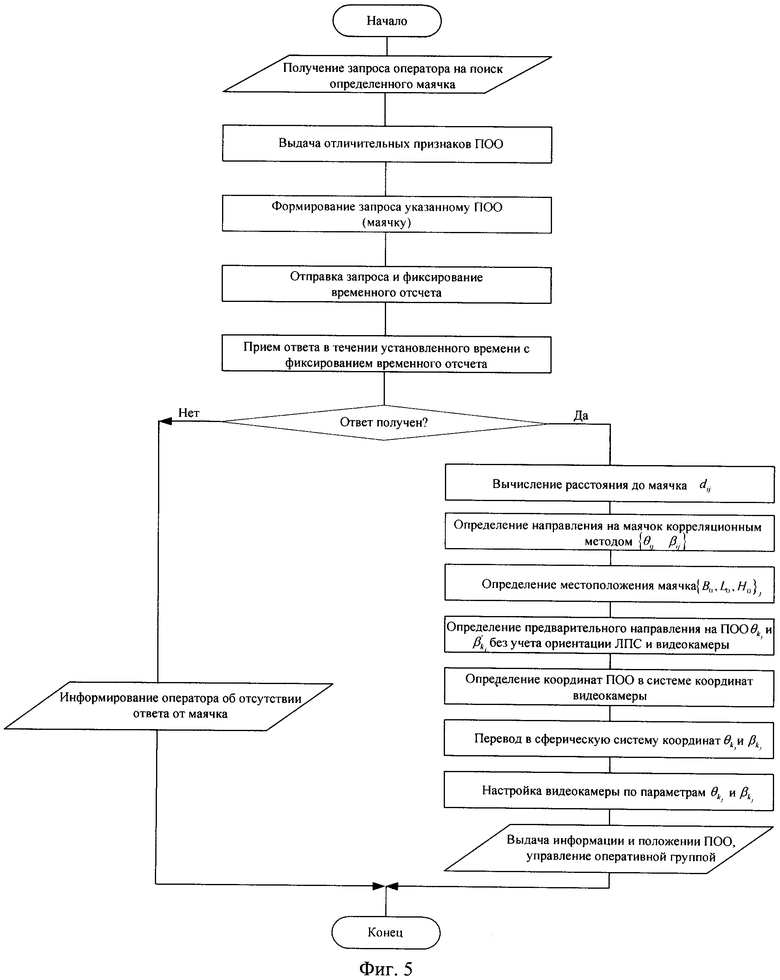
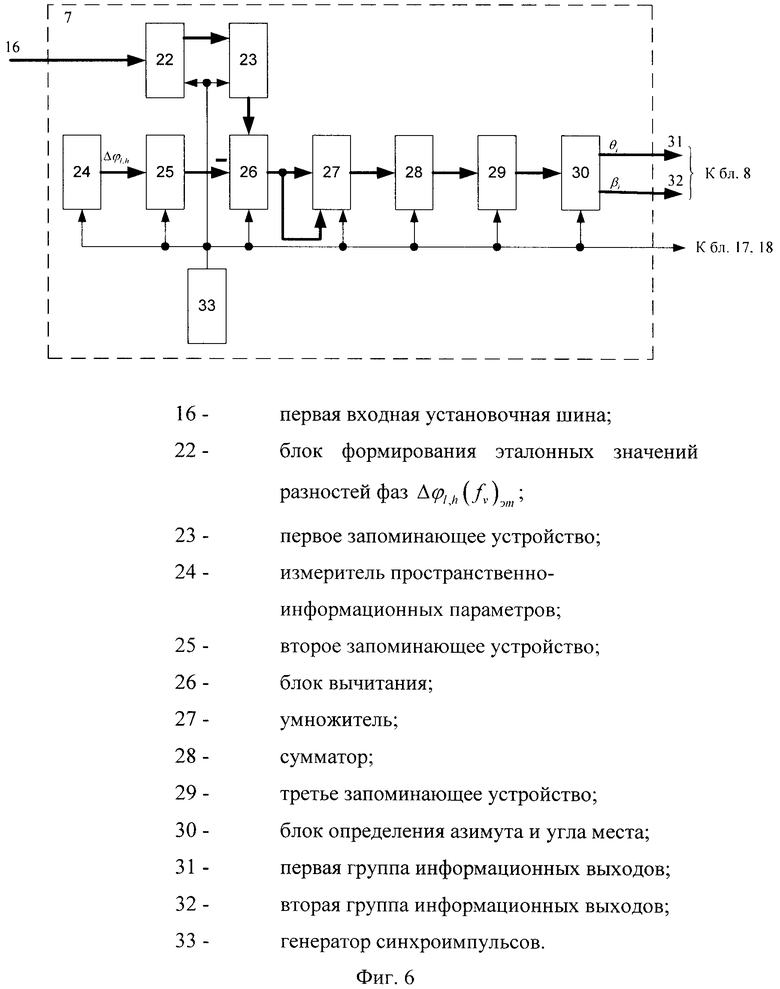

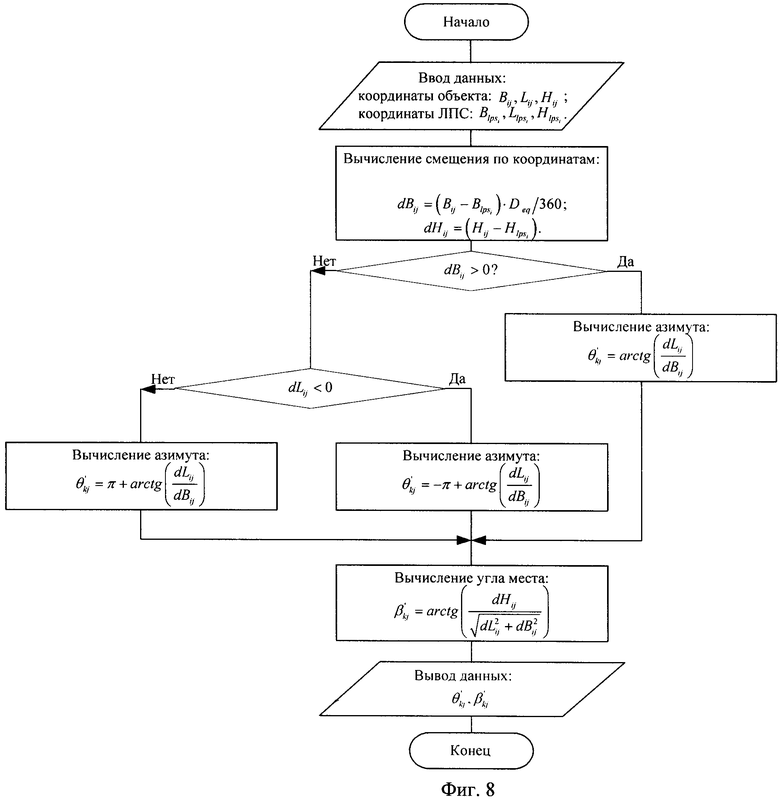
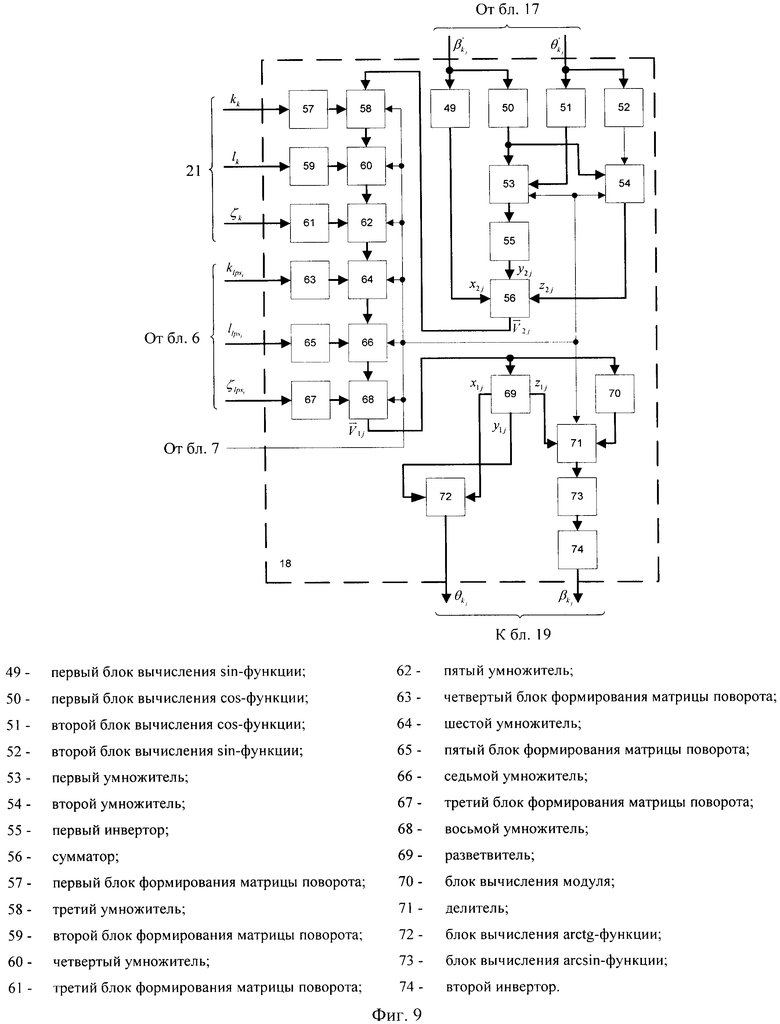
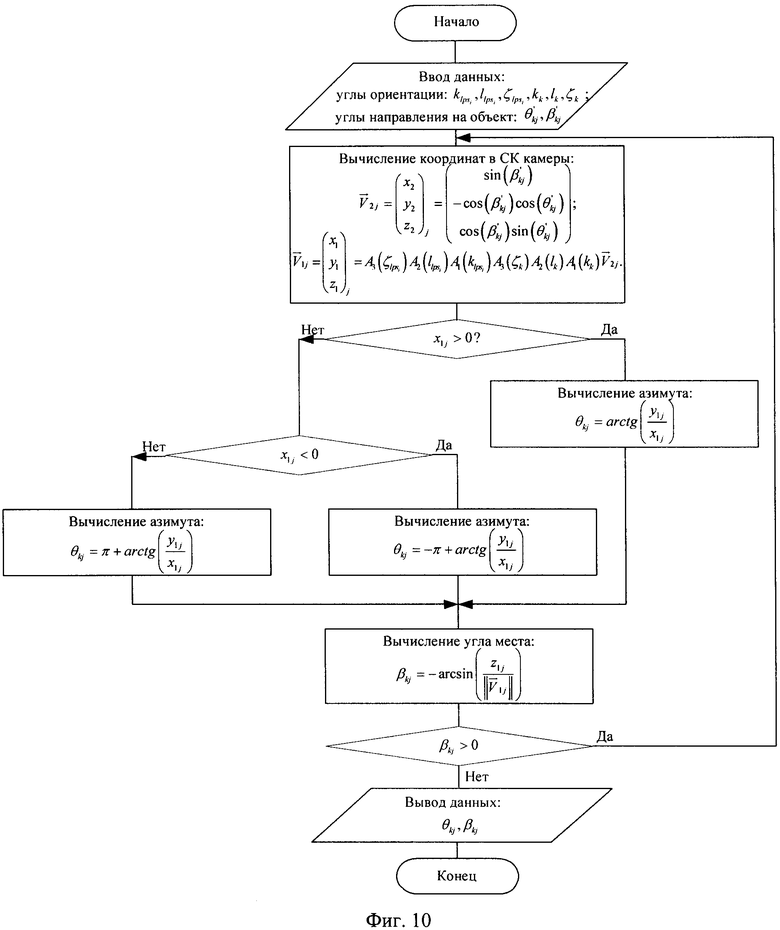
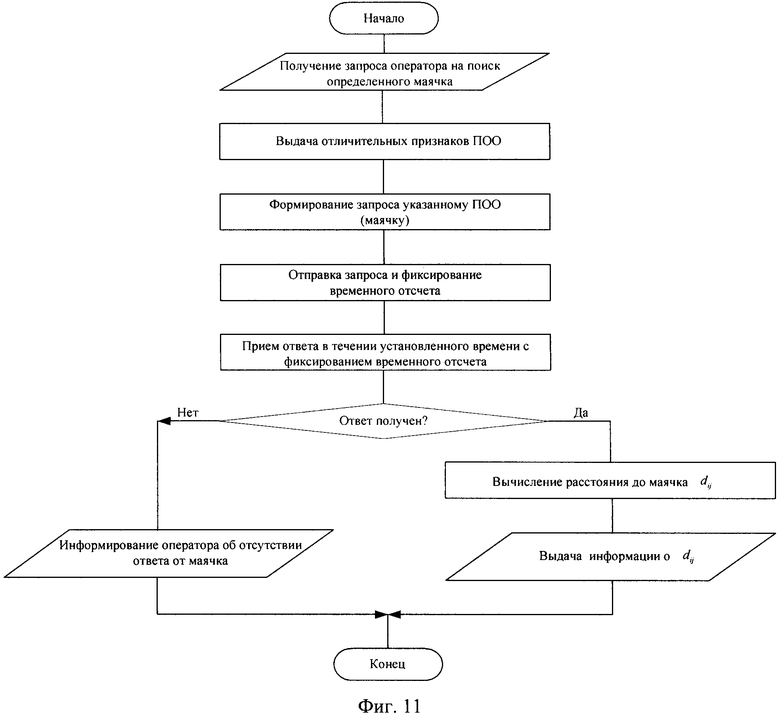
Изобретения относятся к радиотехнике и могут быть использованы в охранной технике. Техническим результатом является обеспечение отслеживания перемещений подвижных охраняемых объектов (ПОО) с одновременным сокращением себестоимости системы. Предварительно запоминают отличительные признаки охраняемых объектов. Подвижный пеленгаторный пункт (ППП) на летно-подъемном средстве (ЛПС) оборудуют видеокамерой, управление которой осуществляет бортовой пеленгатор. При подаче ПОО сигнала тревоги ближайшие к нему приемопередатчики осуществляют его прием и ретрансляцию на центральный пункт контроля, который по местоположению приемопередатчиков определяет местоположение ПОО и формирует команду на вылет ППП на ЛПС в этот район. После взлета ППП измеряет удаление, местоположение, пространственную ориентацию ЛПС, а также предварительные координаты ПОО путем учета взаимной ориентации антенной системы пеленгатора и ЛПС, а также ориентации ЛПС в пространстве. Благодаря наведению видеокамеры с помощью бортового пеленгатора в реальном времени обеспечивается повышение точности измерений. Координаты местоположения ПОО преобразуют в пространственные параметры {θij, βij} с учетом текущего местоположения ЛПС, его пространственной ориентации и ориентации видеокамеры. 2 н.п. ф-лы, 11 ил.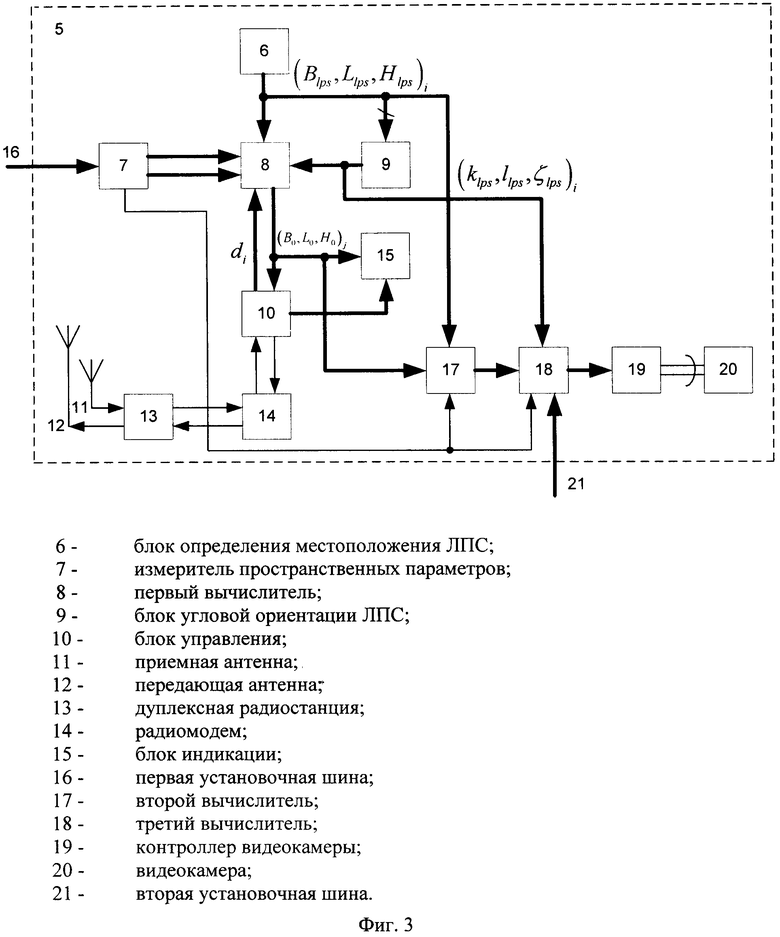
1. Способ контроля состояния охраняемого объекта, заключающийся в том, что предварительно в базу данных центрального пункта контроля заносят данные об истинном местоположении приемопередатчиков, стационарных охраняемых объектов и отличительные признаки всех охраняемых объектов, при несанкционированном доступе в охраняемый объект или по его команде его владельца активируют радиопередатчик, установленный на охраняемом объекте, формируют сигнал тревоги, включающий информацию об отличительных признаках охраняемого объекта, кодирую и излучают сигнал тревоги, принимают сигнал тревоги ближайшими к объекту приемопередатчиками, ретранслируют сигнал тревоги на центральный пункт контроля совместно с данными о номере приемопередатчика, декодируют сигнал тревоги, из которого выделяют информацию об отличительных признаках охраняемого объекта, идентифицируют их путем сравнения с предварительно занесенными в базу данных центрального пункта контроля отличительными признаками охраняемых объектов, на центральном пункте контроля формируют команду на подключение к работе подвижного пеленгаторного пункта на летно-подъемном средстве (ЛПС), с помощью которого активируют в момент времени ti передатчик j-го подвижного охраняемого объекта (ПОО) и измеряют задержку τij в приеме сигнала от него, где τij=tпр.i-toт.i-tm - время приема ответа, tот.i - время отправления запроса, tm - время, необходимое передатчику на обработку запроса и формирование ответа, определяют удаление dij - ПОО от подвижного пеленгаторного пункта  , где с - скорость света, одновременно определяют местоположение подвижного пеленгаторного пункта (Blps, Llps, Hlps)i, где Blps, Llps, Hlps соответственно широта, долгота и высота ЛПС, углы крена
, где с - скорость света, одновременно определяют местоположение подвижного пеленгаторного пункта (Blps, Llps, Hlps)i, где Blps, Llps, Hlps соответственно широта, долгота и высота ЛПС, углы крена  тангажа
тангажа  курсового угла
курсового угла  и склонения
и склонения  ЛПС пеленгаторного пункта, азимут θij и угол места βij на ПОО в системе координат антенной системы, а склонение
ЛПС пеленгаторного пункта, азимут θij и угол места βij на ПОО в системе координат антенной системы, а склонение  определяют как разность между путевым
определяют как разность между путевым  и курсовым
и курсовым  углами ЛПС, определяют предварительные координаты ПОО в момент времени ti
углами ЛПС, определяют предварительные координаты ПОО в момент времени ti  в левосторонней системе декартовых координат антенной системы, уточняют координаты ПОО
в левосторонней системе декартовых координат антенной системы, уточняют координаты ПОО  на основе априорно известной ориентации антенной системы относительно ЛПС (kant, lant, ζant) путем последовательного умножения
на основе априорно известной ориентации антенной системы относительно ЛПС (kant, lant, ζant) путем последовательного умножения  на три соответствующие углам Эйлера матрицы поворота, после чего определяют истинные геоцентрические координаты местоположения ПОО
на три соответствующие углам Эйлера матрицы поворота, после чего определяют истинные геоцентрические координаты местоположения ПОО  с учетом измеренных в момент времени ti пространственных углов ЛПС: крена
с учетом измеренных в момент времени ti пространственных углов ЛПС: крена  , тангажа
, тангажа  и склоненя , широты
и склоненя , широты  и долготы и высоты
и долготы и высоты  , после чего преобразуют истинные геоцентрические координаты
, после чего преобразуют истинные геоцентрические координаты  местоположения ПОО в географические координаты
местоположения ПОО в географические координаты  , направляют оперативную группу в данную точку, уточняют перемещение оперативной группы и ЛПС в соответствии с направлением движения ПОО вплоть до его обнаружения, отличающийся тем, что на подготовительном этапе устанавливают видеокамеру под фюзеляжем ЛПС, а в процессе работы на центральном пункте контроля по координатам приемопередатчиков, принявших сигнал тревоги, определяют район вылета ЛПС, а после взлета ЛПС определяют удаление j-го ПОО относительно координат ЛПС по параллели dLij, меридиану dBij и перпендикуляру (высоте) dHij, вычисляют предварительные значения азимутального угла
, направляют оперативную группу в данную точку, уточняют перемещение оперативной группы и ЛПС в соответствии с направлением движения ПОО вплоть до его обнаружения, отличающийся тем, что на подготовительном этапе устанавливают видеокамеру под фюзеляжем ЛПС, а в процессе работы на центральном пункте контроля по координатам приемопередатчиков, принявших сигнал тревоги, определяют район вылета ЛПС, а после взлета ЛПС определяют удаление j-го ПОО относительно координат ЛПС по параллели dLij, меридиану dBij и перпендикуляру (высоте) dHij, вычисляют предварительные значения азимутального угла  и угла места
и угла места  настройки видеокамеры без учета пространственной ориентации ЛПС и видеокамеры, преобразуют сферические координаты
настройки видеокамеры без учета пространственной ориентации ЛПС и видеокамеры, преобразуют сферические координаты  и
и  j-го ПОО в нормальную систему координат
j-го ПОО в нормальную систему координат  и далее в систему координат видеокамеры
и далее в систему координат видеокамеры  с учетом пространственной ориентации ЛПС и видеокамеры, определяют истинные значения азимутального угла θkj и угла места βkj ориентации видеокамеры на j-й ПОО, одновременно оценивают угол закрытия корпусом ЛПС направления на j-й ПОО, а при выполнении условия βkj<0 ориентируют видеокамеру в соответствии с параметрами θkj и βkj, уточняют местоположения ПОО с учетом привязки его видеоизображения к элементам рельефа местности, направляют оперативную группу в данную точку, уточняют перемещение оперативной группы и ЛПС до момента задержания ПОО.
с учетом пространственной ориентации ЛПС и видеокамеры, определяют истинные значения азимутального угла θkj и угла места βkj ориентации видеокамеры на j-й ПОО, одновременно оценивают угол закрытия корпусом ЛПС направления на j-й ПОО, а при выполнении условия βkj<0 ориентируют видеокамеру в соответствии с параметрами θkj и βkj, уточняют местоположения ПОО с учетом привязки его видеоизображения к элементам рельефа местности, направляют оперативную группу в данную точку, уточняют перемещение оперативной группы и ЛПС до момента задержания ПОО.
2. Устройство контроля состояния охраняемого объекта, включающее центральный пункт контроля и Т приемопередатчиков, каждый из которых соединен с центральным пунктом контроля индивидуальным дуплексным каналом связи, L стационарных охраняемых объектов и Р подвижных охраняемых объектов, каждый из которых содержит комплект оборудования охранной сигнализации и радиостанцию, и подвижный пеленгаторный пункт на летно-подъемном средстве (ЛПС), который соединен дуплексным каналом связи с центральным пунктом контроля или ближайшим приемопередатчиком, при этом подвижный пеленгаторный пункт выполнен содержащим блок определения местоположения ЛПС (Blps, Llps, Hlps)i, измеритель пространственных параметров {θi, βi}, первый вычислитель, предназначенный для последовательного пересчета координат местоположения подвижного охраняемого объекта (ПОО) из одной системы координат в другую, блок угловой ориентации ЛПС (klps, llps, ζlps), блок управления, предназначенный для периодического формирования команды запроса "маячку" ПОО и анализа получаемого ответа, ведения базы данных, а также определения дальности до ПОО, приемную и передающую антенны, дуплексную радиостанцию, радиомодем и блок индикации, причем группа информационных входов измерителя пространственных параметров является первой установочной шиной подвижного пеленгаторного пункта, а первая и вторая группы его информационных выходов соединены со второй и третьей группами информационных входов первого вычислителя, первая группа информационных входов которого соединена с группой информационных входов блока угловой ориентации ЛПС и группой информационных выходов блока определения местоположения ЛПС, пятая группа информационных входов первого вычислителя соединена с группой информационных выходов блока угловой ориентации ЛПС, а группа информационных выходов соединена с первой группой информационных входов блока управления и первой группой информационных входов блока индикации, вторая группа информационных входов которого соединена со второй группой информационных выходов блока управления, первая группа информационных выходов которого соединена с четвертой группой информационных входов первого вычислителя, а третий информационный выход соединен с первым информационным входом радиомодема, первый информационный выход которого соединен со вторым информационным входом блока управления, а второй информационный выход соединен с первым информационным входом дуплексной радиостанции, первый информационный выход которой соединен со вторым информационным входом радиомодема, второй информационный вход дуплексной радиостанции соединен с приемной антенной, а второй информационный выход соединен с передающей антенной, отличающееся тем, что в подвижный пеленгаторный пункт дополнительно введены последовательно соединенные второй вычислитель, предназначенный для определения направления на ПОО  без учета пространственной ориентации ЛПС и видеокамеры, третий вычислитель, предназначенный для определения направления на ПОО
без учета пространственной ориентации ЛПС и видеокамеры, третий вычислитель, предназначенный для определения направления на ПОО  с учетом пространственной ориентации ЛПС и видеокамеры, контроллер видеокамеры, предназначенный для преобразования управляющего сигнала
с учетом пространственной ориентации ЛПС и видеокамеры, контроллер видеокамеры, предназначенный для преобразования управляющего сигнала  в соответствующее механическое воздействие на видеокамеру, и видеокамера, причем первая группа информационных входов второго вычислителя соединена с группой информационных выходов первого вычислителя, а вторая группа информационных входов - с группой информационных выходов блока определения местоположения ЛПС, вторая группа информационных входов третьего вычислителя соединена с группой информационных выходов блока угловой ориентации летно-подъемного средства, третья группа информационных входов является второй установочной шиной подвижного пеленгаторного пункта, а вход синхронизации объединен со входом синхронизации второго вычислителя и соединен с выходом синхронизации измерителя пространственных параметров.
в соответствующее механическое воздействие на видеокамеру, и видеокамера, причем первая группа информационных входов второго вычислителя соединена с группой информационных выходов первого вычислителя, а вторая группа информационных входов - с группой информационных выходов блока определения местоположения ЛПС, вторая группа информационных входов третьего вычислителя соединена с группой информационных выходов блока угловой ориентации летно-подъемного средства, третья группа информационных входов является второй установочной шиной подвижного пеленгаторного пункта, а вход синхронизации объединен со входом синхронизации второго вычислителя и соединен с выходом синхронизации измерителя пространственных параметров.
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2009 |
|
RU2419162C1 |
| US 20080191863 A1, 14.08.2008 | |||
| US 20030169185 A1, 11.09.2003 | |||
| US 20070132597 A1, 14.06.2007. | |||

