Заявляемый способ относится к радиотехнике и может быть использован для контроля состояния и определения местоположения подвижного охраняемого объекта.
Известен способ контроля местоположения транспортных средств (см. А.с. СССР №1837343, МПК5 G08C 17/01, опубл. 30.08.93 г., бюл. №32). Способ предусматривает измерение каждым контролируемым подвижным объектом своего местоположения, формирование радиосигнала, содержащего информацию о его местоположении с задержкой, соответствующей адресу транспортного средства, прием задержанного радиосигнала центральным пунктом, оценку времени задержки, по результатам которой формируют сигнал о местоположении конкретного охраняемого подвижного объекта.
Недостатком способа-аналога является значительное время поиска подвижного охраняемого объекта, что обусловлено невысокой точностью его местоопределения из-за использования алгоритма двухэтапной обработки результатов измерений.
Известен способ охраны транспортных средств (см. Пат. RU 2110845, МПК6 G08B 20/10, опубл. 10.05.98 г., бюл. №10). Способ-аналог предполагает использование пеленгаторными пунктами узкополосного приемника для приема сообщений от мощного передатчика (в состоянии покоя - несущую, а в состоянии тревоги - уникальный код). При совпадении кодов передатчик подвижного охраняемого объекта и исполнительные устройства активизируют.
Недостаток способа состоит в невысокой точности местоопределения подвижных охраняемых объектов и, как следствие, в относительно больших временных затратах на время их поиска.
Известен способ охраны транспортных средств (см. Пат. RU 2032227, МПК6 G08B 25/10, опубл. 27.03.95 г., бюл. №9). В способе-аналоге при несанкционированном доступе в подвижный охраняемый объект или по команде его владельца активизируют радиопередатчик, установленный на подвижном охраняемом объекте, формируют сигнал тревоги, включающий информацию об отличительных признаках охраняемого подвижного объекта, кодируют и излучают сигнал тревоги, принимают его на М пеленгаторных пунктах, где М≥2, и вычисляют пеленги. На центральном пункте сигнал тревоги декодируют и выделяют информацию об отличительных признаках охраняемого объекта. Затем эти признаки идентифицируют путем их сравнения с предварительно записанными в базу данных центрального пункта отличительными признаками охраняемого объекта, излучающего сигнал тревоги. После идентификации объекта оперативная группа выезжает на обнаружение охраняемого мобильного объекта.
В способе-аналоге положительный эффект в виде повышения оперативности поиска охраняемых подвижных объектов достигается за счет большей информативности сигнала тревоги. Однако способу также присущ недостаток - относительно невысокая точность местоопределения охраняемого подвижного объекта из-за использования двухэтапного алгоритма обработки результатов измерений и, как следствие, большое время его поиска.
Наиболее близким по технической сущности к заявляемому является известный способ контроля состояния охраняемого объекта (Пат. RU 2231126, МПК7 G08B 25/10, опубл. 20.06.2004 г.).
В способе-прототипе на подготовительном этапе в базу данных центрального пункта контроля заносят данные об истинном местоположении стационарных охраняемых объектов и отличительные признаки всех охраняемых объектов, при несанкционированном доступе в охраняемый объект или по команде его владельца активизируют радиопередатчик, установленный на охраняемом объекте, формируют сигнал тревоги, включающий информацию об отличительных признаках охраняемого объекта, кодируют и излучают сигнал тревоги, принимают его на М пеленгаторных пунктах, где М≥2, декодируют сигнал тревоги, из которого выделяют информацию об отличительных признаках охраняемого объекта, идентифицируют их путем сравнения с занесенными в базу данных центрального пункта контроля отличительными признаками охраняемых объектов, на М пеленгаторных пунктах измеряют пеленги θm на подвижный охраняемый объект, определяют его местоположение, выделяют из базы данных истинные пеленги θum от М пеленгаторных станций на U стационарные охраняемые объекты, где 1≤U≤3, ближайшие из них к подвижному охраняемому объекту, излучающему сигнал тревоги, и идентификационные признаки U стационарных охраняемых объектов. Рассчитывают расстояние между подвижным охраняемым объектом, излучающим сигнал тревоги, и отобранными стационарными охраняемыми объектами Du, на центральном пункте контроля формируют, кодируют и излучают команду на активацию радиопередатчиков, установленных на отобранных U стационарных охраняемых объектах. Принимают ее, декодируют на U стационарных охраняемых объектах, а затем на каждом из них формируют, кодируют и излучают сигналы контроля. Пеленгуют эти сигналы на М пеленгаторных станциях, вычисляют по ним пеленги θm и передают их на центральный пункт контроля. На центральном пункте контроля вычисляют ошибки пеленгов Δθu=θum-θm, после чего рассчитывают уточненные пеленги θ′ m на подвижный охраняемый объект, излучающий сигнал тревоги, и его уточненное местоположение. Уточненные пеленги θ′ m на подвижный охраняемый объект, излучающий сигнал тревоги, для θ′ m пеленгаторных станций рассчитывают по формуле:
 ,
,
где Кmu - весовой коэффициент ошибки пеленга на u-й стационарный охраняемый объект с m-го пеленгаторного пункта, который, в свою очередь, вычисляют следующим образом:
Kmu=Dmin/Dm,
где Dmin - наименьшее из всех ранее рассчитанных Dm-ых расстояний.
В способе-прототипе, благодаря учету ошибок, полученных при измерении пеленгов на стационарные охраняемые объекты с известными координатами, достигается повышение точности местоопределения подвижного охраняемого объекта, излучающего сигнал тревоги, что, в свою очередь, ведет к уменьшению времени его поиска.
Однако способу-прототипу также, как и аналогам присущ существенный недостаток - значительное время поиска подвижных охраняемых объектов. Данный недостаток является следствием относительно низкой точности местоопределения координат подвижного охраняемого объекта, излучающего сигнал тревоги. Одной из причин этого является реализованная в способе-прототипе двухэтапная обработка результатов измерений. На первом этапе на пеленгаторных пунктах измеряют пеленги θm, которые на втором этапе используют для вычисления местоположения подвижного охраняемого объекта. При двухэтапной обработке оптимизация способа измерения координат источника радиоизлучения может строиться по трем направлениям:
оптимизация второго этапа обработки;
оптимизация первого этапа обработки;
оптимизация (раздельная) обоих этапов обработки.
В книге (Кондратьев B.C. и др. Многопозиционные радиотехнические системы / B.C.Кондратьев, А.Ф.Котов, Л.Н.Макаров; Под редакцией проф. В.В.Цветкова. - М.: Радио и связь, 1989 г. - 264 с.) показано, что ввиду принципиальной нелинейности обоих этапов обработки все три метода оптимизации систем местоопределения с двухэтапной обработкой дают по точности худшие результаты, чем при оптимальной одноэтапной обработке (см. там же стр.13).
Кроме того, способ-прототип предполагает наличие большого количества стационарных охраняемых объектов, равномерно распределенных в зоне контроля, что в реальных условиях является не всегда экономически оправданным. В системах контроля состояния охраняемых объектов, как правило, используются радиопередатчики СВЧ-диапазона волн. Основными причинами ошибок пеленгования, а следовательно и местоопределения, в городских условиях в этом диапазоне является переотражение радиоволн от зданий. Устранение названных погрешностей с использованием пеленгов на стационарные объекты малоэффективно в условиях плотной городской застройки. Это объясняется тем, что охраняемый объект перемещается, а следовательно, и условия распространения радиоволн также изменяются.
Целью заявляемого технического решения является разработка способа контроля состояния охраняемого объекта, обеспечивающего уменьшение времени поиска подвижного охраняемого объекта за счет повышения точности его местоопределения путем одноэтапной обработки результатов измерений первичных пространственно-информационных параметров. Заявляемый способ расширяет арсенал средств данного назначения.
Поставленная цель достигается тем, что в известном способе контроля состояния охраняемого объекта, заключающемся в том, что предварительно в базу данных центрального пункта контроля заносят данные об истинном местоположении стационарных охраняемых объектов и отличительные признаки всех охраняемых объектов, при несанкционированном доступе в охраняемый объект или по команде его владельца активируют радиопередатчик, установленный на охраняемом объекте, формируют сигнал тревоги, включающий информацию об отличительных признаках охраняемого объекта, кодируют и излучают сигнал тревоги, принимают его на М пеленгаторных пунктах, где М≥2, декодируют сигнал тревоги, из которого выделяют информацию об отличительных признаках охраняемого объекта, идентифицируют их путем сравнения с предварительно занесенными в базу данных центрального пункта контроля отличительными признаками охраняемых объектов, на М пеленгаторных пунктах измеряют первичные пространственно-информационные параметры передаваемого сигнала тревоги, а в качестве сигналов тревоги используют частотно-временные матрицы, которые формируют с помощью случайно заданных временных интервалов и соответствующих им номиналов частот, которые определяются индивидуальным ключом, присваиваемым охраняемому объекту, предварительно вычисляют количество N=S/S0 элементарных зон привязки, где S и S0 - соответственно площади зоны контроля и элементарной зоны привязки. Определяют координаты местоположения центров элементарных зон привязки, присваивают каждой элементарной зоне привязки порядковый номер n=1, 2, …, N. Рассчитывают для всех N пеленгаторных пунктов, антенная система каждого из которых включает R>2 антенных элементов, значения эталонных первичных пространственно-информационных параметров на выходах Аmr-го антенного элемента, где m=1, 2,…, М; r=1, 2,…, R; относительно координат местоположения центров каждой элементарной зоны привязки. Эталонные первичные пространственно-информационные параметры рассчитывают для средней частоты сигнала. При обнаружении сигнала тревоги на М пеленгаторных пунктах измеряют первичные пространственно-информационные параметры на выходах Аmr-ных антенных элементов, результаты измерений передают на центральный пункт контроля. Для каждой n-й элементарной зоны привязки вычисляют разность между эталонными и измеренными первичными пространственно-информационными параметрами. Полученные результаты возводят в квадрат и суммируют. Выделяют из N полученных сумм Кn минимальную. Координаты местоположения центра элементарной зоны привязки, соответствующей минимальной сумме, принимают за координаты местоположения охраняемого объекта, подавшего сигнал тревоги. Направляют в выявленную элементарную зону привязки n оперативную группу для поиска подвижного охраняемого объекта, уточняют перемещение оперативной группы в соответствии с направлением движения охраняемого объекта вплоть до его обнаружения.
Для измерения первичных пространственно-информационных параметров для каждой пары антенных элементов всех пеленгаторных пунктов синхронно принятые сигналы тревоги преобразуют в электрические сигналы промежуточной частоты, дискретизируют их и квантуют, после чего формируют из них четыре последовательности отсчетов путем разделения на квадратурные составляющие, запоминают в каждой последовательности предварительно заданное число В отсчетов квадратурных составляющих сигналов, корректируют запомненные отсчеты последовательностей квадратурных составляющих путем последовательного умножения каждого из них на соответствующий отсчет заданного временного окна, формируют из скорректированных последовательностей квадратурных составляющих отсчетов сигналов две комплексные последовательности отсчетов сигналов антенных элементов, после чего обе комплексные последовательности отсчетов сигналов преобразуют с помощью дискретного преобразования Фурье, попарно перемножают отсчеты сигнала преобразованной последовательности одного антенного элемента Аmh на соответствующие комплексно сопряженные отсчеты сигнала преобразованной последовательности другого антенного элемента Аml, где h, 1=1, 2,…R, h≠l, рассчитывают для текущей пары антенных элементов разность фаз сигналов по формуле Δφh,l(f)m=arctg(Uc,m/Us,m), а значения разностей фаз сигналов Δφh,l,m всех возможных парных комбинаций антенных элементов в рамках каждого пеленгаторного пункта используют в качестве первичных пространственно-информационных параметров.
Благодаря новой совокупности признаков в заявляемом способе достигается более полный учет информации о поле сигнала радиопередатчика охраняемого объекта в различных точках его приема. Указанные возможности реализуются при одноэтапном вычислении координат, что и обуславливает положительный эффект в виде повышения точности местоопределения подвижного охраняемого объекта, а следовательно, и сокращение временных затрат на его поиск.
Заявляемый способ поясняется чертежами, на которых показаны:
на фиг.1 - обобщенная структурная схема системы контроля состояния охраняемого объекта;
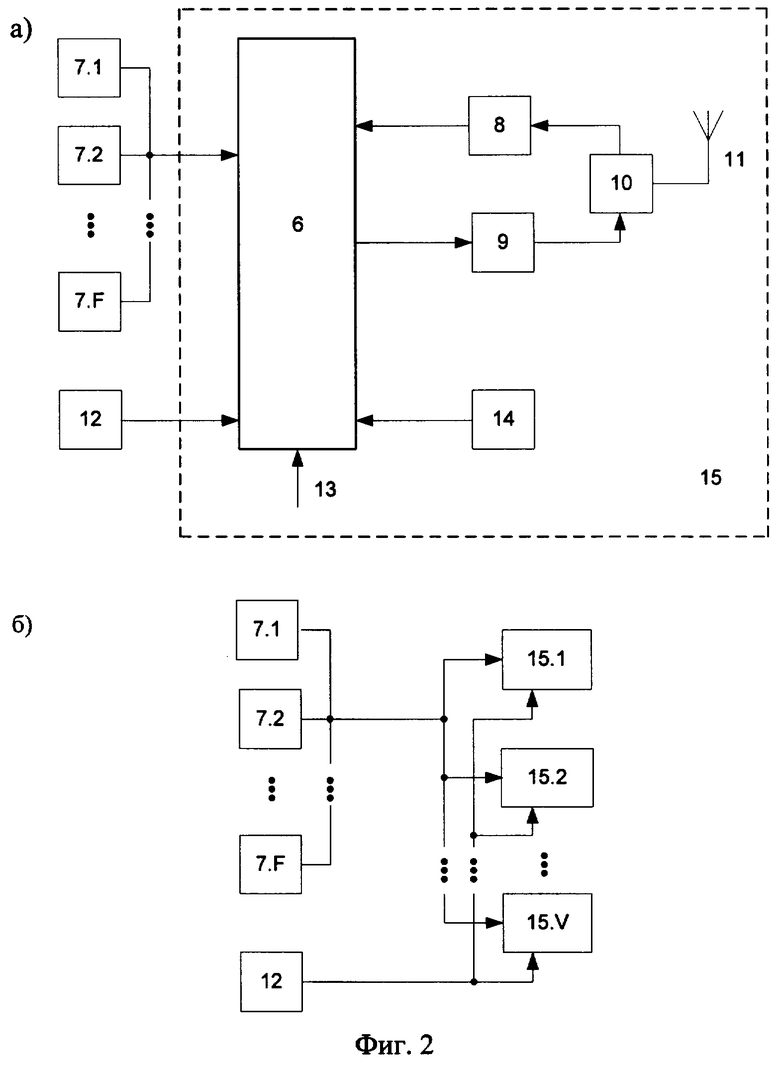
на фиг.2 - состав комплекта оборудования:
а) стационарного охраняемого объекта;
б) подвижного охраняемого объекта;
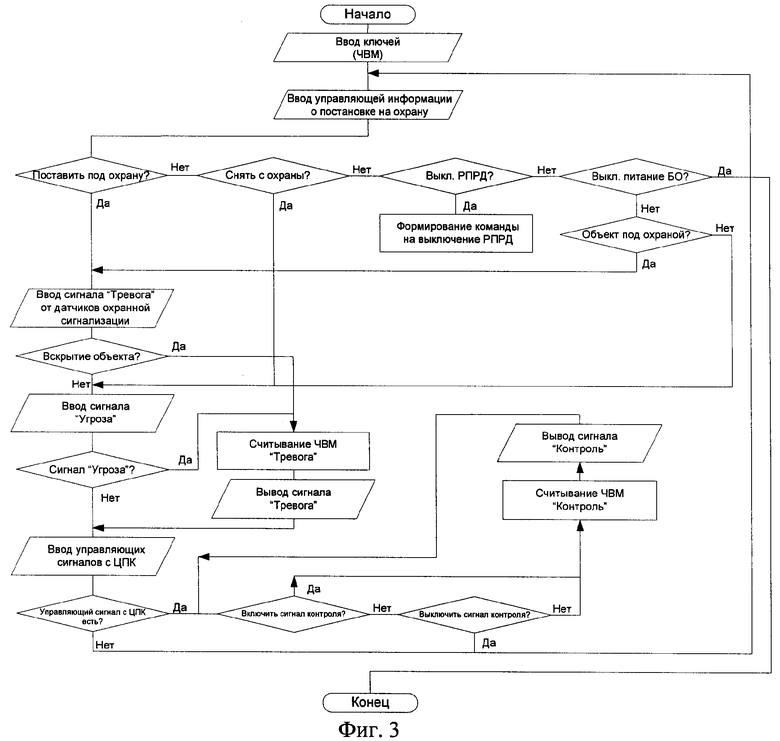
на фиг.3 - алгоритм работы микропроцессора, реализующего функции управляющего контроллера;
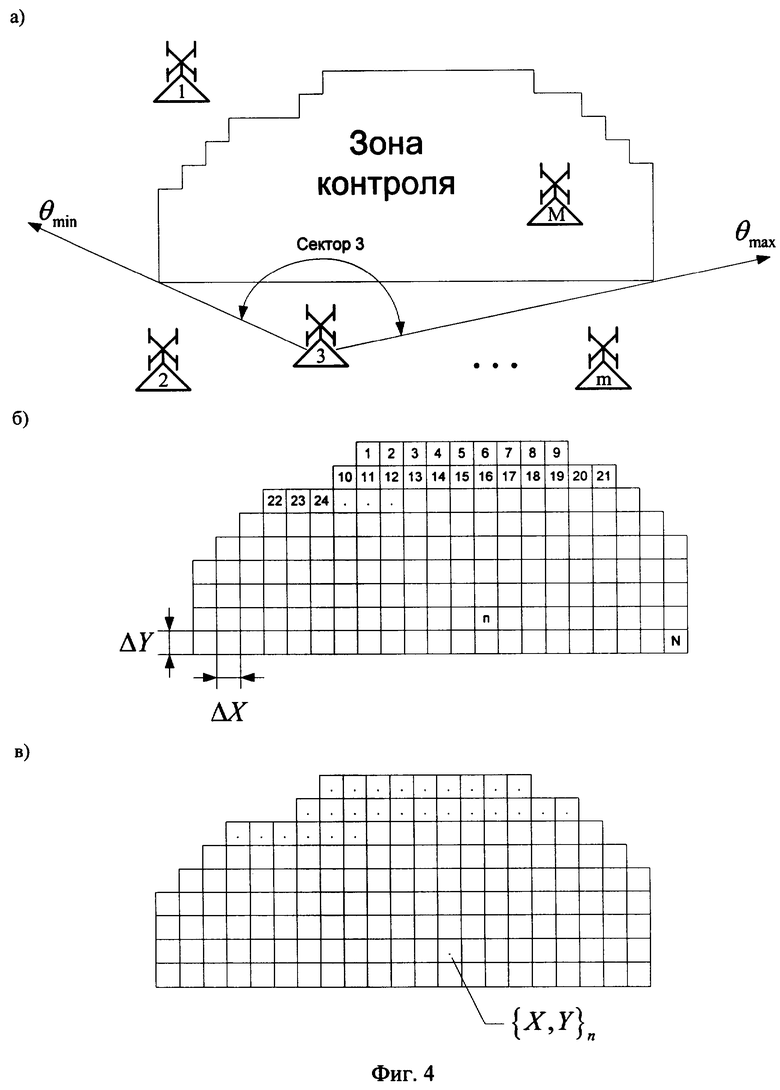
на фиг.4 - порядок формирования элементарных зон привязки и присвоения им порядкового номера;
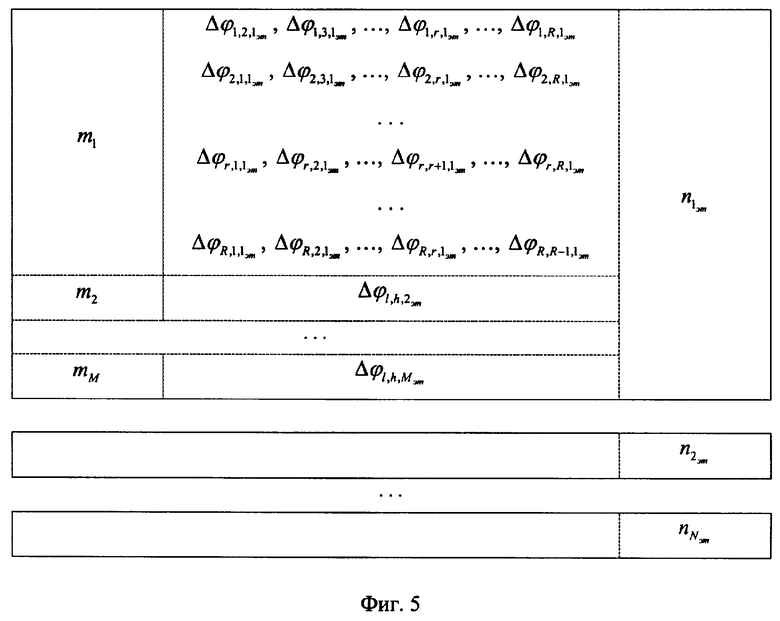
на фиг.5 - порядок формирования N эталонных массивов первичных пространственно-информационных параметров;
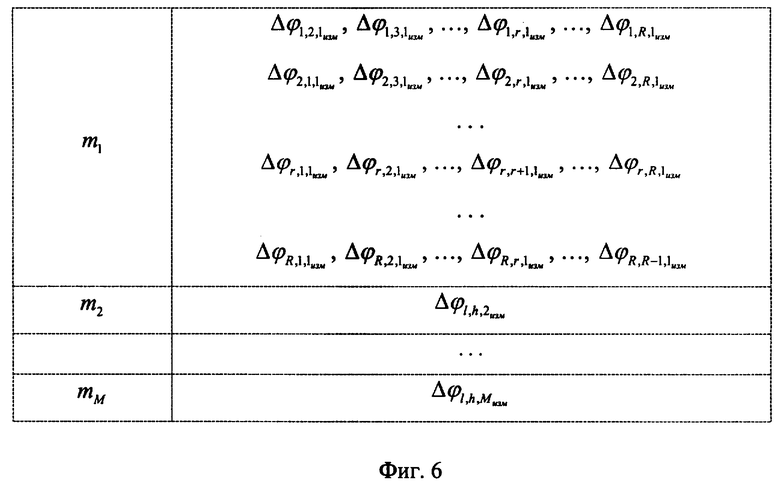
на фиг.6 - порядок формирования массива измеренных первичных пространственно-информационных параметров;
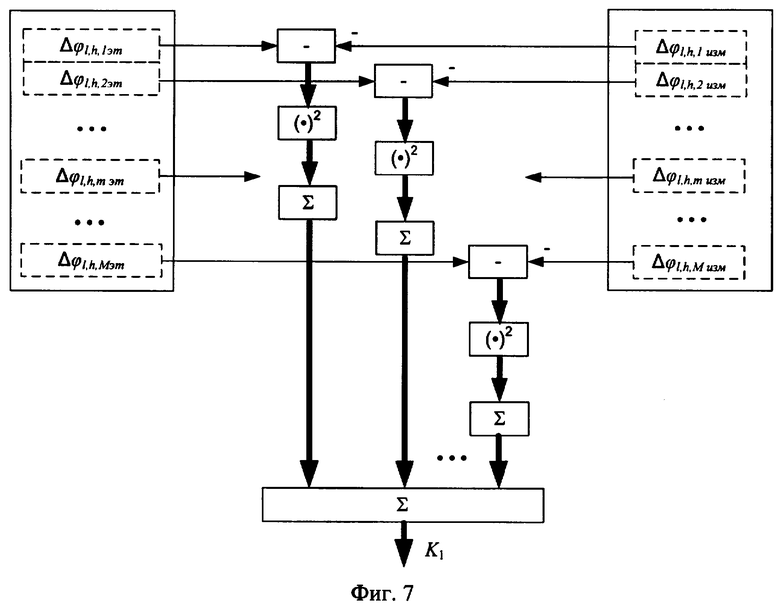
на фиг.7 - очередность вычисления суммы K1 для первой элементарной зоны привязки n1;
на фиг.8 - пространственный спектр сигналов, сформированный на основе измерения разностей фаз 
на фиг.9 - структурная схема пеленгаторного пункта;
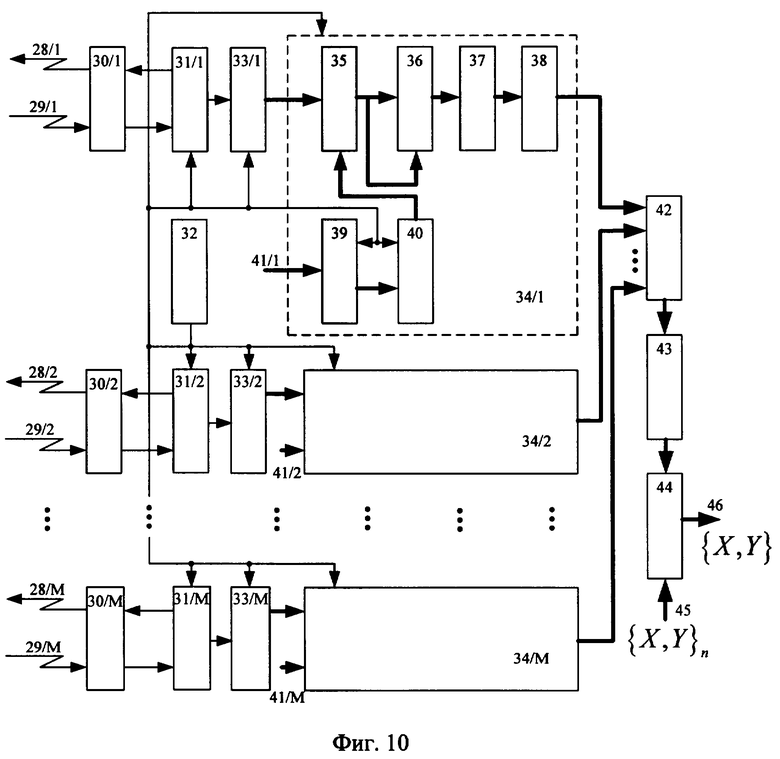
на фиг.10 - структурная схема подсистемы местоопределения центрального пункта контроля;
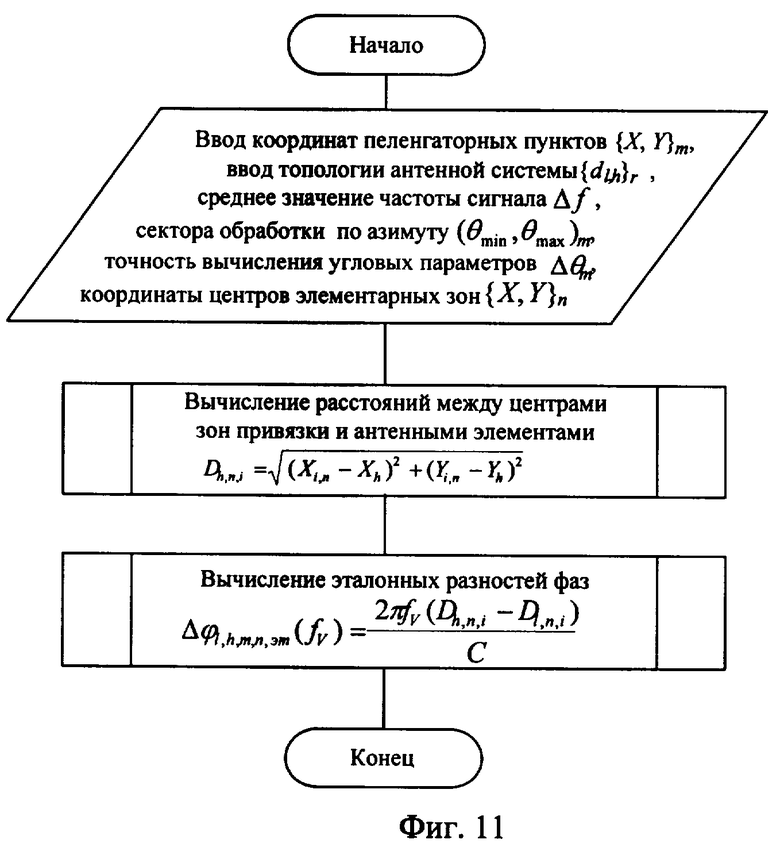
на фиг.11 - алгоритм вычисления на центральном пункте контроля эталонного набора первичных пространственно-информационных параметров.
Из современного уровня развития техники известно, что местоопределение источника радиоизлучения (мобильного охраняемого объекта) может осуществляться следующими способами: дальномерным, разностно-дальномерным, угломерным, разностно-доплеровским, угломерно-дальномерным и др. Во всех случаях точность местоопределения ограничивается погрешностями измерения параметров сигнала: азимута θ или угла места β, задержки сигнала Δτ, доплеровского сдвига частоты Δfдопл и др., а также несовершенством алгоритмов их обработки. Последнее связано, прежде всего, с широким использованием в силу ряда причин двухэтапной обработки. В условиях многолучевости (в городской черте) при низком отношении сигнал/шум ошибки местоопределения резко возрастают из-за многозначности (многомодовости) получаемых оценок параметров сигналов. Оператор поста или автомат вынуждены по заданному критерию принимать решение о значении параметра сигнала (часто ошибочное), что влечет за собой аномальные ошибки в определении местоположения излучателя (подвижного охраняемого объекта). Вся остальная неиспользованная информация о поле сигнала (его параметрах) отбрасывается.
Повышение точности измерения местоположения подвижного охраняемого объекта возможно за счет увеличения количества пространственно разнесенных измерителей, оптимизации их размещения относительно зоны контроля и др. Однако увеличение числа измерителей вносит несущественный вклад в повышение точности местоопределения, возрастает себестоимость системы, затрудняется процесс управления ею.
В заявляемом способе данное противоречие устраняется благодаря использованию одноэтапной обработки сигналов, которое базируется на использовании всей имеющейся информации о поле сигнала в М точках его приема.
Реализацию заявляемого способа можно рассмотреть на примере системы контроля состояния охраняемого объекта, приведенной на фиг.1. В общем виде система включает совокупность из Р подвижных охраняемых объектов 1.1-1.Р и L стационарных охраняемых объектов 2.1-2.L, каждый из которых снабжен комплектом оборудования. Кроме того, система содержит М пеленгаторных пунктов 3.1-3.М, центральный пункт контроля 4 и Т приемопередатчиков 5.1-5.T, управляемых с центрального пункта контроля. Один из М пеленгаторных пунктов может быть развернут совместно с центральным пунктом контроля. Все пеленгаторные пункты 3 и приемопередатчики 5 соединены с центральным пунктом контроля 4 индивидуальным дуплексным каналом связи.
Каждый подвижный и стационарный охраняемый объект снабжен комплектом оборудования, показанным на фиг.2. Стандартный вариант оборудования включает управляющий контроллер 6, группу из F датчиков охранной сигнализации 7.1-7F, выходы которых подключены к входной шине управляющего контроллера 6, радиоприемник 8 и радиопередатчик 9, антенный коммутатор 10 и антенну 11 с соответствующими связями. В управляющем контроллере предусматривается входная шина 13 для ввода исходных данных ("ключа") пользовательского комплекта и настройки оборудования. Внешний пульт управления 14 предоставляет возможность пользователю ставить объект на охрану и снимать его с охраны. Кроме того, в стандартном комплекте оборудования, как подвижного, так и стационарного, охраняемых объектов предусматривается возможность подключения к управляющему контроллеру кнопки "Угроза" 12. Управляющий контроллер 6 может быть реализован на микропроцессоре AT91SAM7S64, алгоритм работы которого приведен на фиг.3.
Комплект оборудования подвижного охраняемого объекта по желанию заказчика может быть продублирован (см. фиг.2б). Возможны упрощенные варианты дублирования, когда на объекты устанавливаются дополнительные блоки 9 и 10. В комплект оборудования всех охраняемых объектов входит автономное аварийное питание.
В предлагаемом способе контроля состояния охраняемого объекта предусматривается формирование следующих сигналов.
На подвижном и стационарном охраняемых объектах формируют:
сигнал "Тревога" при несанкционированном вскрытии охраняемого объекта или при нажатии кнопки "Угроза";
сигналы контроля технического состояния оборудования охраняемых объектов. В отличие от прототипа, на центральном пункте контроля не формируют управляющие сигналы контроля для стационарных охраняемых объектов с целью уточнения местоположения подвижного охраняемого объекта.
В предлагаемом способе аналогично способу-прототипу для всех видов сигналов, формируемых на подвижных и стационарных охраняемых объектах, назначают по два ключа. Последним ставятся в соответствие частотно-временные матрицы (ЧВМ), которые на подготовительном этапе вводятся в память микроконтроллера 6 (см. фиг.2) и память центрального пункта контроля 4. Частотно-временная матрица конкретного охраняемого объекта соответствует введенным в базу данных центрального пункта контроля 4 отличительным признакам этого объекта. В качестве последних для мобильного охраняемого объекта могут быть использованы государственный номер, марка автомобиля, цвет, данные о его владельце и т.д. Для стационарных охраняемых объектах дополнительно заносятся данные об истинном их местоположении. Прием ЧВМ от охраняемых объектов осуществляется с помощью М пеленгаторных пунктов 3 и Т приемопередатчиков 5, с их последующей ретрансляцией на центральный пункт контроля 4 или непосредственно на пункте 4. Таким образом, независимо от вида сигнала, поступившего на центральный пункт контроля 4, его идентификация заключается в поиске в базе данных ЧВМ, идентичной принятой. Результаты сравнения однозначно указывают на вид принятого сигнала и на отличительные признаки охраняемого объекта, подающего этот сигнал. Структура ЧВМ может быть различной и зависит от выделенного частотного диапазона и количества пользователей системы. В рамках заявляемого способа структура ЧВМ аналогична ЧВМ способа-прототипа.
В предлагаемом способе на подготовительном этапе дополнительно выполняются следующие операции. Заданную зону контроля, например территорию города, делят на элементарные зоны привязки (см. фиг.4б). Размерам элементарной зоны привязки соответствуют предварительно заданные точности местоопределения {ΔX,ΔY}, например 50 м × 50 м. На следующем этапе находят географические координаты центров элементарных зон привязки {X,Y} и присваивают каждой из них порядковый номер (см. 4б, в) из набора n=1, 2, …, N.
Далее для всех М пеленгаторных пунктов рассчитывают эталонные значения первичных пространственно-информационных параметров. В качестве последних целесообразно использовать значения разности фаз сигналов Δφl,h для всех возможных парных комбинаций антенных элементов в рамках каждого пеленгаторного пункта. Термин "пеленгаторный пункт" в заявляемом способе условный, в его функции не входит определение пеленга θm.
Выбор Δφl,h в качестве первичного пространственно-информационного параметра основан на следующем. Одним из наиболее перспективных направлений реализации измерителей пространственных параметров является использование интерферометрических пеленгаторов (см. Логинов Н.А. Актуальные вопросы радиоконтроля в Российской Федерации. - М.: Радио и связь, 2000 г., стр.138-139). Интерферометры существуют двух типов: фазовые и корреляционные (см. там же, стр.138). В материалах Пат. US №4728959 "Радиопеленгационная система", МПК G01S 05/04, опубл. 08.08.1986 г. отмечается, что в сильно пересеченной местности и городских условиях в меньшей степени подлежат искажению фазовые параметры сигнала. Кроме того, в книге Torrieri D. J. Principles of military communications system. Dedham. Massachusetts Artech House, inc., 1981. - 298 p. отмечается, что "потенциальные возможности оценки угла прихода сигнала путем сравнения фазы выше, чем у корреляционного интерферометра, если оцениваемый сигнал имеет малую нестабильность несущей частоты".
Порядок расчета эталонных первичных пространственно-информационных параметров следующий. Вводят координаты всех пеленгаторных пунктов и топологию их антенных систем. Данные по топологии антенных систем включают значения взаимных расстояний между антенными элементами решетки и ее ориентацию относительно направления на север. При использовании антенной решетки с круговой эквидистантной структурой за направление ее ориентации может быть выбран вектор, проходящий через второй антенный элемент в направлении первого антенного элемента. Для каждого пеленгаторного пункта определяют сектор обработки сигналов по азимуту (θmin, θmax) и необходимое разрешение (точность) вычисления углового параметра Δθ. Значения θmin, θmax, Δθ определяют из места размещения пеленгаторного пункта относительно зоны контроля и требуемой точности местоопределения {ΔX, ΔY}. Например, для третьего пеленгаторного пункта на фиг.4а показан сектор обработки сигналов (сектор 3) и значения θ3min,
θ3mах. Последние выбираются исходя из того, чтобы вся зона контроля попала в сектор обработки сигналов охраняемых объектов. Аналогично определяется необходимая точность вычисления углового параметра Δθ. Погрешность определения параметра Δθ не должна приводить к ошибкам местоопределения подвижного охраняемого объекта, превышающим площадь элементарной зоны привязки. В процессе расчета эталонных первичных пространственно-информационных параметров эталонный источник размещают поочередно в центре каждой элементарной зоны привязки с известными координатами {X,Y}n.
Вычисляют угловые параметры θmn сигнала для каждого m-го пеленгаторного пункта с учетом размещения источника в n-х точках зоны контроля и его удаление Dmn.
Далее для каждого углового параметра θmn эталонного источника в точке n вычисляют значение разностей фаз  для всех возможных комбинаций пар антенных элементов решетки всех пеленгаторных пунктов
для всех возможных комбинаций пар антенных элементов решетки всех пеленгаторных пунктов

где  - расстояние между h-м антенным элементом и эталонным источником, расположенным в n-й элементарной зоне привязки, h, l=1, 2, …, R, h≠l, i∈(1…((θmax-θmin)/Δθ)); xin, yin и xh, yh - координаты эталонного источника и антенного элемента соответственно.
- расстояние между h-м антенным элементом и эталонным источником, расположенным в n-й элементарной зоне привязки, h, l=1, 2, …, R, h≠l, i∈(1…((θmax-θmin)/Δθ)); xin, yin и xh, yh - координаты эталонного источника и антенного элемента соответственно.
Полученные в результате расчетов (моделирования) эталонные первичные пространственно-информационные параметры  оформляются в виде N эталонных массивов данных, вариант представления информации в которых показан на фиг.5. После выполнения названных операций система готова к работе.
оформляются в виде N эталонных массивов данных, вариант представления информации в которых показан на фиг.5. После выполнения названных операций система готова к работе.
В процессе работы системы владелец подвижного охраняемого объекта с помощью пульта управления 14 формирует сигнал на принятие объекта под охрану. При несанкционированном вскрытии подвижного охраняемого объекта, находящегося под охраной, по сигналам одного или нескольких датчиков охранной сигнализации 7.f в управляющем контроллере 6 (см. фиг.2, 3) формируют, кодируют и излучают сигнал "Тревога". При обнаружении на пунктах 3, 4 и 5 сигнала тревоги от одного из подвижных охраняемых объектов на центральном пункте контроля 4 формируют N массивов первичных пространственно-информационных параметров  (см. фиг.6), структура представления информации в которых аналогична вышерассмотренной на фиг.5. Для этого на всех пеленгаторных пунктах, принявших сигнал тревоги, измеренные параметры для всех сочетаний антенных элементов Аl,h передают на центральный пункт контроля. Здесь их оформляют в N массивов измеренных первичных пространственно-информационных параметров. Таким образом, в предлагаемом способе первый этап обработки сигналов на М пеленгаторных пунктах исключен, а вся необходимая информация о поле сигнала в точках приема, заключенная в первичных пространственно-информационных параметрах, передается на центральный пункт контроля.
(см. фиг.6), структура представления информации в которых аналогична вышерассмотренной на фиг.5. Для этого на всех пеленгаторных пунктах, принявших сигнал тревоги, измеренные параметры для всех сочетаний антенных элементов Аl,h передают на центральный пункт контроля. Здесь их оформляют в N массивов измеренных первичных пространственно-информационных параметров. Таким образом, в предлагаемом способе первый этап обработки сигналов на М пеленгаторных пунктах исключен, а вся необходимая информация о поле сигнала в точках приема, заключенная в первичных пространственно-информационных параметрах, передается на центральный пункт контроля.
На следующем этапе реализации заявляемого способа для каждой n-й элементарной зоны привязки (см. фиг.7) последовательно вычисляют разность между эталонными и измеренными первичными пространственно-информационными параметрами, которые возводят в квадрат и суммируют в соответствии с выражением

На фиг.7 иллюстрируется порядок вычисления суммы Kn для первой элементарной зоны привязки n1. Далее определяют минимальную сумму  Координаты местоположения центра элементарной зоны привязки, соответствующей
Координаты местоположения центра элементарной зоны привязки, соответствующей  принимают за координаты местоположения мобильного охраняемого объекта, подавшего сигнал тревоги. Операция возведения в квадрат в выражении (2) необходима для того, чтобы все результаты вычитания имели положительное значение. В противном случае могла возникнуть ситуация, когда сумма положительных и отрицательных разностей
принимают за координаты местоположения мобильного охраняемого объекта, подавшего сигнал тревоги. Операция возведения в квадрат в выражении (2) необходима для того, чтобы все результаты вычитания имели положительное значение. В противном случае могла возникнуть ситуация, когда сумма положительных и отрицательных разностей  компенсировали друг друга.
компенсировали друг друга.
Таким образом, вся необходимая информация о поле сигнала из нескольких точек приема поступает на центральный пункт контроля и за один этап обработки преобразуется в искомые координаты мобильного охраняемого объекта. При этом достигается заметное повышение точности измерений за счет более полного учета информации о поле сигнала в условиях многолучевости и при низких соотношениях сигнал/шум. Следует отметить, что в предлагаемом способе не используется информация о координатах стационарных охраняемых объектов как недостаточно информативная (в силу непрерывно изменяющихся условий при перемещении источника радиоизлучения СВЧ-диапазона в пределах городской застройки), а ее учет при одноэтапной обработке невозможен. Далее измеренное местоположение охраняемого объекта используется для его поиска оперативной группой. В процессе поиска подвижного охраняемого объекта постоянно отслеживаются все его перемещения и перемещения оперативной группы с целью оптимизации процесса наведения последней на объект поиска. Для этого на транспортных средствах оперативной группы также устанавливаются передатчики (радиомаяки), работающие в общей полосе частот.
В случае нажатия кнопки "Угроза" владельцем подвижного охраняемого объекта (например, при попытке насильственного захвата транспортного средства или угрозе жизни его владельцу) также формируют, кодируют и излучают сигнал Тревога" (см. фиг.2 и 3), по которому аналогично определяют его местоположение.
При срабатывании одного или нескольких датчиков охранной сигнализации или при нажатии кнопки "Угроза" на стационарном охраняемом объекте аналогично формируют, кодируют и излучают сигнал "Тревога". Последний достаточно принять хотя бы одним из пунктов 3, 4 или 5 (см. фиг.2). В этом случае нет необходимости решать задачу местоопределения объектов. После декодирования сигнала тревоги на центральном пункте контроля, выделения информации об отличительных признаках и их идентификации определяют координаты стационарного охраняемого объекта. Это обстоятельство позволяет существенно расширить зону обслуживания стационарных охраняемых объектов используя для ретрансляции сигналов тревоги вынесенные приемопередатчики 5.
Изложенное выше поясняется на фиг.8, где представлен пространственный спектр D(θ)m сигналов, сформированный на основе измерения разностей фаз  в антенных элементах решетки. Он представляет из себя совокупность значений скалярных величин Kθ, находящихся в однозначной зависимости от направления прохода сигнала. Значения Кθ вычисляются в соответствии с выражением
в антенных элементах решетки. Он представляет из себя совокупность значений скалярных величин Kθ, находящихся в однозначной зависимости от направления прохода сигнала. Значения Кθ вычисляются в соответствии с выражением

где l, h=1, 2, …, R; l≠h, i=1, 2,…, I; I - разрядность углового спектра, которая определяется заданной точностью измерения пеленга Δθ, если Δθ=1°, I=360.
Результаты получены с помощью фазового интерферометра, лежащего в основе пеленгаторных пунктов. Подобные интерферометры находят применение при реализации систем с двухэтапной обработкой сигналов (см. Torrieri D. J. Principles of military communications system. Dedham. Massachusetts Artech House, inc., 1981. - 298 p.; Логинов Н.А. Актуальные вопросы радиоконтроля в Российской Федерации. - М.: Радио и связь, 2000 г., стр.138-139). В этих измерителях первичные пространственно-информационные параметры Δφl,h,m преобразуются в пространственные параметры θm по минимальному значению D(θ)m.
Из анализа фиг.8 следует, что наиболее вероятное направление прихода сигнала является θ=215°. Для этого направления значение функции D(θ)m имеет минимальное значение (68 условных единиц). Однако в спектре присутствуют несколько локальных минимумов с направлений 85°, 165°, 280°, каждый из которых с некоторой вероятностью может оказаться истинным направлением на подвижный охраняемый объект. Природа возникновения локальных минимумов обычно связана с многолучевостью распространения радиоволн в силу разных причин, а также резонансными явлениями в антенной решетке и др. В способе-прототипе эта информация отбрасывается, а на центральный пункт контроля передается только одно значение θ=215°.
В предлагаемом способе вся необходимая информация о поле сигнала, заключенная в значениях первичных пространственно-информационных параметров  передается на центральный пункт контроля. Это позволяет максимально учесть всю имеющуюся информацию о поле сигнала в пространственно разнесенных точках.
передается на центральный пункт контроля. Это позволяет максимально учесть всю имеющуюся информацию о поле сигнала в пространственно разнесенных точках.
Рассмотрим порядок измерения первичных пространственно-информационных параметров Δφl,h. Синхронно принятые антенными элементами Аl и Аh высокочастотные сигналы в полосе Δf преобразуют в электрические сигналы промежуточной частоты. Значение последней определяется характеристиками аналого-цифрового преобразования. Сигналы промежуточной частоты дискретизируют и квантуют. Интервал дискретизации выбирают в соответствии с теоремой отсчетов (см. Введение в цифровую фильтрацию. Под. ред. Р.Богнера и А.Константинидиса. - М.: Мир, 1976, стр.26-27). Большинство алгоритмов цифровой обработки сигналов рассчитаны на работу с комплексными числами. Для перехода от действительных к комплексным сигналам применяют квадратурные преобразования сигналов. Из цифровых сигналов обоих каналов формируют четыре последовательности отсчетов путем умножения каждой из них на цифровые отсчеты двух гармонических сигналов одной и той же частоты, сдвинутые относительно друг друга на π/2.
Возможна и другая очередность выполнения названных операций. Аналоговый сигнал u(t) делят на два идентичных сигнала, после чего каждый из них умножают на соответствующий аналоговый гармонический сигнал той же частоты. Эти гармонические сигналы сдвинуты по фазе относительно друг друга на угол π/2. После разложения сигнала на квадратуры каждую из них оцифровывают.
В результате выполнения названных операций формируют четыре последовательности отсчетов (по две на каждый антенный элемент Al и Аh). В каждой последовательности запоминают заданное число В отсчетов квадратурных составляющих. Их количество определяется заданной импульсной характеристикой используемых цифровых фильтров. Наибольшее распространение получили фильтры с конечной импульсной характеристикой. Для этого отсчеты каждой квадратурной составляющей сигнала перемножаются на отсчеты временного окна. В качестве последнего могут быть использованы функции Хемминга, или Блекмана, или Кайзера, или треугольная, или др. (см. Гольденберг Л.М. и др. Цифровая обработка сигналов: Справочник / Л.М.Гольденберг, Б.Д.Матюшкин, М.Н.Поляк. - М.: Радио и связь, 1985. - 312 с.).
В результате выполнения операции умножения получают четыре скорректированные последовательности квадратурных составляющих. Из скорректированных последовательностей формируют две комплексные последовательности сигналов. Для этого попарно объединяют соответствующие отсчеты скорректированных последовательностей квадратурных составляющих сигналов антенных элементов. После выполнения данных операций обе комплексные последовательности отсчетов преобразуют с помощью дискретного преобразования Фурье
 .
.
Полученные две преобразованные последовательности характеризуют спектры совокупностей сигналов, принимаемых в антенных элементах Аl и Ah. Каждая из названных последовательностей несет информацию о фазе сигналов, принимаемых соответствующим антенным элементом.
Далее попарно перемножают частотные отсчеты сигнала преобразованной последовательности одного антенного элемента Аl на соответствующие комплексно сопряженные отсчеты сигнала преобразованной последовательности другого антенного элемента Аh

На завершающем этапе для каждой пары антенных элементов рассчитывают разности фаз сигналов Δφl,h по формуле

Значения разностей фаз сигналов Δφl,h,m для всех возможных парных
комбинаций антенных элементов в рамках каждого пеленгаторного пункта m используют в качестве первичных пространственно-информационных параметров.
В ряде работ выполнен сравнительный анализ точностных характеристик одно- и двухэтапной обработки оцениваемых пространственных параметров сигналов (см. Дубрович А.В., Сосулин Ю.Г. Одноэтапное оценивание местоположения источников радиоизлучения пассивной системой // Радиотехника и электроника. Том 43, п.12, 1998, стр.1486-1494). В них показано, что потенциальная точность оценивания координат определяется матричной границей Кратера-Рао ФKp, равной обращенной матрице Фишера:
В матрице ФKp элементом, несущим информацию о точности определения координат, является  . Это справедливо при достаточно большом отношении сигнал/шум. Однако при малом отношении сигнал/шум
. Это справедливо при достаточно большом отношении сигнал/шум. Однако при малом отношении сигнал/шум  перестает характеризовать точностные характеристики измерителей. В настоящее время аналитические исследования таких ситуаций отсутствуют, в связи с чем сравнение алгоритмов возможно выполнить лишь на основе моделирования.
перестает характеризовать точностные характеристики измерителей. В настоящее время аналитические исследования таких ситуаций отсутствуют, в связи с чем сравнение алгоритмов возможно выполнить лишь на основе моделирования.
Исследованию подлежала система местоопределения на плоскости из пяти пространственно разнесенных пеленгаторных пунктов. Размер контролируемой площади 120×120 км, центральная частота сигнала 100 МГц, антенная решетка каждого измерителя представляет собой четыре разнесенных на 0,6 метров антенных элемента. Сигнал и шумы имели прямоугольный спектр, ширина которых 2Δf=128 кГц, отношение сигнал/шум одинаково для всех измерителей. В двухэтапном алгоритме вначале оптимально (методом максимального правдоподобия) оценивался пеленг  . На втором этапе вычислялись координаты источника радиоизлучения (подвижного охраняемого объекта). В одноэтапном алгоритме оценка местоположения излучателя проводилась путем сканирования по элементарным зонам привязки с целью поиска оценки, максимизирующей функцию правдоподобия.
. На втором этапе вычислялись координаты источника радиоизлучения (подвижного охраняемого объекта). В одноэтапном алгоритме оценка местоположения излучателя проводилась путем сканирования по элементарным зонам привязки с целью поиска оценки, максимизирующей функцию правдоподобия.
Для выбранных условий предлагаемый способ контроля состояния охраняемого объекта имеет преимущество перед способом-прототипом при низких отношениях сигнал/шум. Вероятность аномальной ошибки в предлагаемом способе ниже на 4-6 дБ, чем в способе-прототипе. Это объясняется тем, что при уменьшении отношения сигнал/шум η ниже порогового значения помимо основного максимума функции правдоподобия, соответствующего истинным параметрам сигнала, начинают проявляться моды, расположенные произвольно в пространстве поиска и соизмеримые по своему уровню. При высоких отношениях сигнал/шум η≥10 эффективность заявляемого способа соизмерима с эффективностью способа-прототипа.
Таким образом, при использовании новой совокупности существенных признаков заявляемого способа контроля состояния охраняемого объекта обеспечивается повышение точности местоопределения подвижных охраняемых объектов и, как следствие, сокращение временных затрат на их поиск.
Реализация предлагаемого способа трудностей не вызывает. Основными элементами системы являются М пеленгаторных пунктов 3 и центральный пункт управления 4, дополненные средствами связи 5. Пеленгаторные пункты 3 связаны между собой через пункты 4 каналами связи, с помощью которых реализуется система управления типа "Звезда". С этой целью может использоваться радиосвязь типа RADIOETHERNET на частоте 2,4 ГГц или оптическое волокно. Индивидуальные комплекты оборудования подвижных и стационарных охраняемых объектов могут быть реализованы аналогично подобному оборудованию способа-прототипа (см. фиг.2, 3). Основные отличия в реализации предлагаемого способа от прототипа находятся в подсистеме местоопределения центрального пункта контроля и реализации пеленгаторных пунктов. Каждый пеленгаторный пункт (см. фиг.9) содержит антенную решетку 16, антенный коммутатор 17, аналого-цифровой преобразователь 19, блок преобразования Фурье 20, блок вычисления первичных пространственно-информационных параметров 21, запоминающее устройство 22, генератор синхроимпульсов 23, радиомодем 24 и дуплексную радиостанцию 25.
Подсистема местоопределения центрального пункта контроля 4 (см. фиг.10) содержит М дуплексных радиостанций 30, М радиомодемов 31, М запоминающих устройств 33, М трактов анализа 34, каждый из которых содержит установочный вход 41, блок вычитания 35, умножитель 36, второй сумматор 37, запоминающие устройства 38 и 40, блок формирования эталонного набора первичных пространственно-информационных параметров 39. Кроме того, подсистема местоопределения центрального пункта контроля содержит первый сумматор 42, запоминающее устройство 43, блок принятия решения 44 и группу установочных входов 45.
Перед началом работы системы (см. фиг.1, 4, 9, 10) осуществляется описание пространственных характеристик антенных решеток всех пеленгаторных пунктов 3. С этой целью определяется местоположение каждого пеленгаторного пункта, например, с помощью устройства радионавигации GPS. Измеряются взаимные расстояния между антенными элементами решетки 16, определяется склонение антенной решетки относительно направления на север. Результаты измерений со всех пеленгаторных пунктов передаются на центральный пункт контроля 4 и по соответствующим шинам 41/1-41/М (см. фиг.10) поступают на входы блоков формирования эталонного набора первичных пространственно-информационных параметров 39 соответствующих трактов анализа 34/1-34/М. По установочной шине 45 (фиг.10) в блок принятия решения 44 вводят координаты центров элементарных зон привязки. В блоках 39 трактов анализа (см. фиг.10) по рассмотренному выше алгоритму вычисляются эталонные наборы первичных пространственно-информационных параметров, которые в дальнейшем хранятся в запоминающих устройствах 40.
Каждый пеленгаторный пункт 3 (см фиг.9) представляет собой фазовый интерферометр и содержит антенную решетку 16 из R антенных элементов в количестве более двух, расположенных в плоскости пеленгования. Антенный коммутатор 17 содержит R входов и два выхода, один из которых выбран опорным, а второй - сигнальным. Выходы антенных элементов (как правило - штыревая несимметричная антенна) антенной решетки 16 подсоединены к соответствующим входам антенного коммутатора 17. Выходы коммутатора 17 соединяются с соответствующими входами двухканального приемника 18, использующего общие гетеродины. Блок 18 может быть выполнен на базе двух приемников IC-R8500 фирмы ICOM. Аналого-цифровой преобразователь 19 и блок преобразования Фурье 20 выполняют двухканальными. Блоки 19 и 20 реализуются с помощью стандартных плат субмодуля цифрового приема ADMDDC2WB и ADP60PCI v.3.2 на процессоре Shark ADSP21062.
Блок вычисления первичных пространственно-информационных параметров 21 предназначен для вычисления измеренных разностей фаз (выражения 4 и 5), реализуется на базе платы ADP60PCI v.3.2 на процессоре Shark ADSP21062.
Радиомодемы 22 (31) могут быть реализованы на базе изделий Kantronics KPC-3 Plus.
Дуплексные радиостанции 24 (30) реализуют с помощью радиостанций IC-F310S фирмы ICOM.
Подсистема местоопределения центрального пункта контроля 4 предназначена для расчета эталонных значений первичных пространственно-информационных параметров для всех пеленгаторных пунктов и их хранения, сбора измеренных значений первичных пространственно-информационных параметров, вычисления местоопределения источника радиоизлучения подвижного охраняемого объекта. Расчет эталонных первичных пространственно-информационных параметров сигналов  и их хранение осуществляется с помощью блоков 39 и 40 трактов анализа 34. Данная функция осуществляется в соответствии с алгоритмом, приведенным на фиг.11. Сбор и хранение первичных пространственно-информационных параметров реализуется с помощью дуплексных радиостанций 30, радиомодемов 31 и запоминающих устройств 33. Основное предназначение трактов анализа 34 состоит в том, чтобы оценить степень отличия измеренных параметров
и их хранение осуществляется с помощью блоков 39 и 40 трактов анализа 34. Данная функция осуществляется в соответствии с алгоритмом, приведенным на фиг.11. Сбор и хранение первичных пространственно-информационных параметров реализуется с помощью дуплексных радиостанций 30, радиомодемов 31 и запоминающих устройств 33. Основное предназначение трактов анализа 34 состоит в том, чтобы оценить степень отличия измеренных параметров  от эталонных
от эталонных  рассчитанных для всех эталонных зон привязки N. Данная операция осуществляется в соответствии с фиг.7.
рассчитанных для всех эталонных зон привязки N. Данная операция осуществляется в соответствии с фиг.7.
Задача сумматора 42 состоит в том, чтобы просуммировать полученные в трактах 34 отличия в параметрах всех пеленгаторных пунктов по каждой элементарной зоне привязки n. Блок 44 на первом этапе осуществляет сравнение всех хранящихся в блоке 43 сумм и выбирает среди них минимальную. Номера ячеек памяти блока 43 находятся в однозначном соответствии с номерами элементарных зон привязки, что позволяет блоку 44 принять решение о наиболее вероятном местоположении источника радиоизлучения подвижного охраняемого объекта. На втором этапе в блоке 44 осуществляется переход от номера элементарной зоны привязки к координатам {X,Y}n центра этой зоны. Эта операция реализуется благодаря использованию априорной информации о координатах центров элементарных зон привязки, поступившей на информационные входы 45 блока 44 на подготовительном этапе. На выходах 46 блока 44 формируются данные о координатах подвижного охраняемого объекта.
Блок 39 тракта анализа 34 может быть выполнен на базе микропроцессора, например, К1810ВМ86. Алгоритм его работы приведен на фиг.11. Реализация остальных элементов трудностей не вызывает.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2009 |
|
RU2419162C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2011 |
|
RU2469408C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2296341C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263328C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2011 |
|
RU2476900C1 |
| КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА РАДИОМОНИТОРИНГА | 2011 |
|
RU2459218C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И СКОРОСТИ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2014 |
|
RU2558683C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2006 |
|
RU2306579C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2002 |
|
RU2231126C1 |



Изобретение относится к охранной технике. На подготовительном этапе запоминают отличительные признаки всех охраняемых объектов, определяют количество элементарных зон привязки, рассчитывают для всех М пеленгаторных пунктов с известными координатами значения эталонных первичных пространственно-информационных параметров (ППИП) относительно координат местоположения центров каждой n-ой элементарной зоны привязки, n=1, 2, …, N. На этапе работы при приеме сигнала тревоги от подвижного охраняемого объекта группой из m пеленгаторных пунктов измеряют на каждом из них ППИП, передают ППИП на центральный пункт контроля, вычисляют для каждой элементарной зоны привязки n разности между эталонными и измеренными ППИП и выделяют из полученных величин минимальную. Координаты местоположения центра элементарной зоны привязки принимают за координаты местоположения подвижного охраняемого объекта. Одновременно сигнал тревоги декодируют на центральном пункте контроля, выделяют информацию об отличительных признаках охраняемого объекта, идентифицируют их путем сравнения с предварительно занесенными в базу данных отличительными признаками охраняемых объектов. Направляют в определенную зону привязки оперативную группу для поиска подвижного охраняемого объекта, подавшего сигнал тревоги. Уточняют перемещение оперативной группы в соответствии с направлением движения охраняемого объекта вплоть до его обнаружения. Изобретение позволяет сократить время поиска подвижного охраняемого объекта, подавшего сигнал тревоги, путем повышения точности определения его местоположения при использовании одноэтапной обработки результатов измерений. 1 з.п. ф-лы, 11 ил.
1. Способ контроля состояния охраняемого объекта, заключающийся в том, что предварительно в базу данных центрального пункта контроля заносят данные об истинном местоположении стационарных охраняемых объектов и отличительные признаки всех охраняемых объектов, при несанкционированном доступе в охраняемый объект или по команде его владельца активируют радиопередатчик, установленный на охраняемом объекте, формируют сигнал тревоги, включающий информацию об отличительных признаках охраняемого объекта, кодируют и излучают сигнал тревоги, принимают его на M пеленгаторных пунктах, где М≥2, декодируют сигнал тревоги, из которого выделяют информацию об отличительных признаках охраняемого объекта, идентифицируют их путем сравнения с предварительно занесенными в базу данных центрального пункта контроля отличительными признаками охраняемых объектов, на M пеленгаторных пунктах измеряют первичные пространственно-информационные параметры передаваемого сигнала тревоги, а в качестве сигналов тревоги используют частотно-временные матрицы, которые формируют с помощью случайно заданных временных интервалов и соответствующих им номиналов частот, которые определяются индивидуальным ключом, присваиваемым охраняемому объекту, отличающийся тем, что предварительно вычисляют количество N=S/S0 элементарных зон привязки, где S и S0 - соответственно площади зоны контроля и элементарной зоны привязки, а также определяют координаты местоположения центров элементарных зон привязки, присваивают каждой элементарной зоне привязки порядковый номер n=1, 2, …, N, рассчитывают для всех М пеленгаторных пунктов, антенная система каждого из которых включает R>2 антенных элементов, значения эталонных первичных пространственно-информационных параметров на выходах Amr-го антенного элемента, где m=1, 2, …, М; r=1, 2, …, R, относительно координат местоположения центров каждой элементарной зоны привязки, причем эталонные первичные пространственно-информационные параметры рассчитывают для средних частот спектра сигнала, при обнаружении сигнала тревоги на M пеленгаторных пунктах измеряют первичные пространственно-информационные параметры на выходах Аmr-х антенных элементов, результаты измерений передают на центральный пункт контроля, для каждой n-й элементарной зоны привязки вычисляют разность между эталонными и измеренными первичными пространственно-информационными параметрами, полученные разности возводят в квадрат и суммируют, выделяют из N полученных сумм Кn минимальную, а координаты местоположения центра элементарной зоны привязки, соответствующей минимальной сумме, принимают за координаты местоположения охраняемого объекта, подавшего сигнал тревоги, направляют в выявленную элементарную зону привязки n оперативную группу для поиска подвижного охраняемого объекта, уточняют перемещение оперативной группы в соответствии с направлением движения охраняемого объекта вплоть до его обнаружения.
2. Способ по п.1, отличающийся тем, что для измерения первичных пространственно-информационных параметров для каждой пары антенных элементов всех пеленгаторных пунктов синхронно принятые сигналы тревоги преобразуют в электрические сигналы промежуточной частоты, дискретизируют их и квантуют, после чего формируют из них четыре последовательности отсчетов путем разделения на квадратурные составляющие, запоминают в каждой последовательности предварительно заданное число В отсчетов квадратурных составляющих сигналов, корректируют запомненные отсчеты последовательностей квадратурных составляющих путем последовательного умножения каждого из них на соответствующий отсчет заданного временного окна, формируют из скорректированных последовательностей квадратурных составляющих отсчетов сигналов две комплексные последовательности отсчетов сигналов антенных элементов, после чего обе комплексные последовательности отсчетов сигналов преобразуют с помощью дискретного преобразования Фурье, попарно перемножают отсчеты сигнала преобразованной последовательности одного антенного элемента
Amh на соответствующие комплексно сопряженные отсчеты сигнала преобразованной последовательности другого антенного элемента Aml, где h, l=1, 2, …R, h≠1, рассчитывают для текущей пары антенных элементов разность фаз сигналов по формуле Δφh,l,m=arctg(Uc,m/Us,m), а значения разностей фаз сигналов φh,l,m, для всех возможных парных комбинаций антенных элементов в рамках каждого пеленгаторного пункта используют в качестве первичных пространственно-информационных параметров.
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2002 |
|
RU2231126C1 |
| СПОСОБ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2032227C1 |
| СПОСОБ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ | 1996 |
|
RU2110845C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |

