Изобретение относится к автоматике и может быть использовано в системах управления астатическими объектами с запаздыванием, параметры которых - неизвестные постоянные или медленно меняющиеся во времени величины, а измерению доступен только выходной сигнал объекта, но не его производные.
Наиболее близким техническим решением к предлагаемому является адаптивная система управления астатическим объектом с запаздыванием [Патент RU 2288496, МПК C1 G05B 13/02, 2006.01], содержащая задатчик, первый сумматор, объект регулирования, интегратор, второй сумматор, адаптивный регулятор, причем выход задатчика связан с суммирующим входом первого сумматора, выход объекта регулирования соединен со вторым вычитающим входом первого сумматора, выход второго сумматора соединен с входом интегратора, выход интегратора соединен с соответствующим вычитающим входом первого сумматора и вычитающим входом второго сумматора, первый вход адаптивного регулятора соединен с выходом задатчика, на второй вход адаптивного регулятора поступает сигнал с выхода первого сумматора, выход адаптивного регулятора соединен с входом объекта регулирования и суммирующим входом второго сумматора.
Недостатком этой системы является невозможность ее работы с объектами, обладающими астатизмом второго порядка.
Задачей изобретения является расширение функциональных возможностей системы, т.е. в обеспечении работоспособности для случая наличия в объекте астатизма второго порядка.
Сущность изобретения состоит в том, что в систему, содержащую задатчик, первый сумматор, первый интегратор, второй сумматор, объект регулирования, адаптивный регулятор, состоящий из первого умножителя, второго интегратора, третьего сумматора, второго умножителя, линейной части, образованной четвертым сумматором, первым блоком задания коэффициентов, третьим интегратором, при этом выход задатчика соединен с первым входом первого сумматора и с первым входом адаптивного регулятора, с которого сигнал одновременно подается на второй вход первого умножителя и на второй вход второго умножителя; на второй вход первого сумматора подается выход объекта регулирования, выход первого сумматора подается на второй вход адаптивного регулятора, с которого сигнал подается на первый вход первого умножителя; выход адаптивного регулятора подается одновременно на вход объекта регулирования и на первый вход второго сумматора, выход второго сумматора соединен со входом первого интегратора, сигнал с выхода первого интегратора поступает на второй вход второго сумматора; выход первого умножителя одновременно подается на второй интегратор и на второй вход третьего сумматора, сигнал с выхода второго интегратора подается на первый вход третьего сумматора, сигнал с выхода третьего сумматора подается на первый вход второго умножителя, выход второго умножителя соединен с блоком линейной части адаптивного регулятора, где сигнал подается на первый вход четвертого сумматора, выход четвертого сумматора соединен с блоком задания коэффициентов, выход блока задания коэффициентов соединен с третьим интегратором, выход третьего интегратора соединен с вторым входом четвертого сумматора, дополнительно вводятся второй блок задания коэффициентов, четвертый интегратор, пятый сумматор, третий блок задания коэффициентов, пятый интегратор, при этом выход первого интегратора подается на второй блок задания коэффициентов и на четвертый интегратор, сигнал с выхода четвертого интегратора подается на третий вход первого сумматора, сигнал с выхода второго блока задания коэффициентов поступает на четвертый вход первого сумматора, сигнал с выхода первого блока задания коэффициентов подается на первый вход пятого сумматора, на второй вход пятого сумматора подается сигнал с выхода пятого интегратора, сигнал с выхода пятого сумматора подается на третий бок задания коэффициентов, сигнал с выхода третьего блока задания коэффициентов подается на вход пятого интегратора и на выход адаптивного регулятора.
Вводя в систему второй блок задания коэффициентов, четвертый интегратор, пятый сумматор, третий блок задания коэффициентов, пятый интегратор, получают в системе новую функцию, которая заключается в том, что теперь обеспечивается работоспособность в случае наличия астатизма второго порядка.
На фиг.1 представлена блок-схема предлагаемой адаптивной системы автоматического управления; на фиг.2 - схема блока адаптивного регулятора; на фиг.3 - схема блока линейной части адаптивного регулятора.
Система содержит задатчик 1, первый сумматор 2, адаптивный регулятор 3, объект регулирования 4, первый интегратор 5, второй сумматор 6, второй блок задания коэффициентов 7, четвертый интегратор 8, линейную часть адаптивного регулятора 9, второй умножитель 10, третий сумматор 11, второй интегратор 12, первый умножитель 13, четвертый сумматор 14, третий интегратор 15, первый блок задания коэффициентов 16, пятый сумматор 17, третий блок задания коэффициентов 18, пятый интегратор 19.
Объект регулирования описывается передаточной функцией вида

где p=d/dt - оператор дифференцирования; τ=const>0 - неизвестное постоянное запаздывание; R(p) и Q(p) - полиномы, описывающие соответственно числитель и знаменатель передаточной функции, Q(p) - Гурвицев полином.
Адаптивный регулятор состоит из линейной и нелинейной части

где g(t) - выход нелинейной части; WL(p) - передаточная функция линейной части адаптивного регулятора, которая в нашем случае имеет вид

где К>0, T>0 - соответственно коэффициент усиления и постоянная времени звена.
Выход нелинейной части g(t) формируется следующим образом

где r - сигнал с выхода задатчика, c(t) - параметр, алгоритм настройки которого определяется следующим образом

где сИ(t) сП(t) - соответственно интегральная и пропорциональная составляющая настройки.
С помощью критерия гиперустойчивости Попова можно показать, что полученная система автоматического управления будет устойчивой, если параметры сИ(t), сП(t) определить следующим образом

где e(t) - выход сумматора 2; h1 h2>0 - постоянные числа.
Система функционирует следующим образом.
Выходной сигнал U1=r задатчика 1 входного сигнала поступает на суммирующий вход первого сумматора 2 и на первый вход адаптивного регулятора 3. На выходе первого сумматора 2 формируется сигнал U2=е, который поступает на второй вход адаптивного регулятора 3. Управляющее воздействие U3=u с выхода адаптивного регулятора 3 подается одновременно на вход объекта 4 регулирования, на который действует аддитивное возмущение f, удовлетворяющее условиям

а также на суммирующий вход второго сумматора 6, на вход которого поступает сигнал U5=X1 с выхода интегратора 5. Во втором сумматоре 6 формируется сигнал  , µ=const>0, поступающий на вход интегратора 5, где он интегрируется и поступает одновременно на второй блок задания коэффициентов 7, где умножается на Т, и на четвертый интегратор 8. На второй вычитающий вход первого сумматора 2 подается сигнал U4=у, с выхода объекта регулирования 4, на третий вычитающий - с выхода четвертого интегратора 8, на четвертый вычитающий - с выхода второго блока задания коэффициентов 7. Таким образом, первый сумматор 2 осуществляет алгебраическое суммирование четырех сигналов U2=U1-U4-U7-C8=е с соответствующими коэффициентами β
, µ=const>0, поступающий на вход интегратора 5, где он интегрируется и поступает одновременно на второй блок задания коэффициентов 7, где умножается на Т, и на четвертый интегратор 8. На второй вычитающий вход первого сумматора 2 подается сигнал U4=у, с выхода объекта регулирования 4, на третий вычитающий - с выхода четвертого интегратора 8, на четвертый вычитающий - с выхода второго блока задания коэффициентов 7. Таким образом, первый сумматор 2 осуществляет алгебраическое суммирование четырех сигналов U2=U1-U4-U7-C8=е с соответствующими коэффициентами β  , β=const>0.
, β=const>0.
Функциональная схема адаптивного регулятора 3 приведена на фиг.2.
Выход первого сумматора 2 соединен с первым входом первого умножителя 13, второй вход первого умножителя 13 соединен с выходом задатчика 1, сигнал U13=е·r с выхода первого умножителя 13 поступает на вход второго интегратора 12 и на второй вход третьего сумматора 11, первый вход третьего сумматора 11 соединен с выходом второго интегратора 12. Таким образом, третий сумматор 11 осуществляет алгебраическое сложение двух сигналов с соответствующими коэффициентами  . Выход третьего сумматора 11 соединен с первым входом второго умножителя 10, второй вход второго умножителя 10 соединен с выходом задатчика 1. На выходе второго умножителя 10 формируется сигнал U10=g, который поступает на вход блока линейной части адаптивного регулятора 9.
. Выход третьего сумматора 11 соединен с первым входом второго умножителя 10, второй вход второго умножителя 10 соединен с выходом задатчика 1. На выходе второго умножителя 10 формируется сигнал U10=g, который поступает на вход блока линейной части адаптивного регулятора 9.
Функциональная схема блока линейной части 9 адаптивного регулятора приведена на фиг.3.
Сигнал с выхода второго умножителя 10 поступает на первый суммирующий вход четвертого сумматора 14, на второй вычитающий вход четвертого сумматора 14 с соответствующим коэффициентом 1/К поступает сигнал с выхода третьего интегратора 15, на вход третьего интегратора 15 поступает сигнал с выхода первого блока задания коэффициентов 16, в первом блоке задания коэффициентов 16 происходит умножение сигнала, поступающего с выхода четвертого сумматора 14 на коэффициент K/T. Выход первого блока задания коэффициентов 16 также соединен с первым суммирующим входом пятого сумматора 17, на второй вычитающий вход пятого сумматора 17 с соответствующим коэффициентом 1/Т поступает сигнал с выхода пятого интегратора 19, на вход пятого интегратора 19 поступает сигнал U18=U3=u с выхода третьего блока задания коэффициентов 18, а в третьем блоке задания коэффициентов 18 происходит умножение сигнала, поступающего с выхода пятого сумматора 17 на коэффициент 1/Т. Выход третьего блока задания коэффициентов 18 является выходом блока линейной части регулятора 9 и выходом адаптивного регулятора 3, т.е. формирует сигнал U3.
Технический результат заключается в расширении функциональных возможностей системы, т.е. в обеспечении работоспособности для случая наличия в объекте астатизма второго порядка.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементарной базы.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2013 |
|
RU2513847C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2468406C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2005 |
|
RU2282883C1 |
| Система автоматического регулирования давления пара в магистрали барабанного котла | 2019 |
|
RU2746377C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2010 |
|
RU2437137C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2005 |
|
RU2288496C1 |
| АДАПТИВНАЯ СИСТЕМА СЛЕЖЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2005 |
|
RU2294005C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С НАБЛЮДАТЕЛЕМ ПЕРЕМЕННЫХ СОСТОЯНИЯ ДЛЯ ОБЪЕКТА С ЗАПАЗДЫВАНИЯМИ | 2013 |
|
RU2541097C2 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ЭТАЛОННЫМ УПРЕДИТЕЛЕМ ДЛЯ ОБЪЕКТОВ С НЕСКОЛЬКИМИ ЗАПАЗДЫВАНИЯМИ | 2009 |
|
RU2397531C1 |


Изобретение относится к автоматике и может быть использовано в системах управления астатическими объектами с запаздыванием, параметры которых - неизвестные постоянные или медленно меняющиеся во времени величины, а измерению доступен только выходной сигнал объекта, но не его производные. Техническим результатом является расширение функциональных возможностей системы за счет обеспечения работоспособности при наличии в объекте астатизма второго порядка. Система содержит объект регулирования, задатчик, пять интеграторов, пять сумматоров, три блока задания коэффициентов, два умножителя и связи между ними. 3 ил.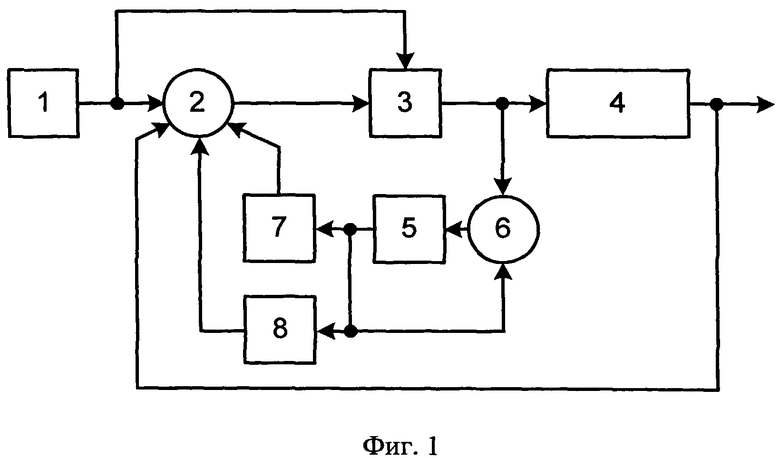
Адаптивная система управления астатическим объектом с запаздыванием, содержащая задатчик, первый сумматор, первый интегратор, второй сумматор, объект регулирования, адаптивный регулятор, состоящий из первого умножителя, второго интегратора, третьего сумматора, второго умножителя, линейной части, образованной четвертым сумматором, первым блоком задания коэффициентов, третьим интегратором, при этом выход задатчика соединен с первым входом первого сумматора и с первым входом адаптивного регулятора, с которого сигнал одновременно подается на второй вход первого умножителя и на второй вход второго умножителя; на второй вход первого сумматора подается выход объекта регулирования, выход первого сумматора подается на второй вход адаптивного регулятора, с которого сигнал подается на первый вход первого умножителя; выход адаптивного регулятора подается одновременно на вход объекта регулирования и на первый вход второго сумматора, выход второго сумматора соединен со входом первого интегратора, сигнал с выхода первого интегратора поступает на второй вход второго сумматора; выход первого умножителя одновременно подается на второй интегратор и на второй вход третьего сумматора, сигнал с выхода второго интегратора подается на первый вход третьего сумматора, сигнал с выхода третьего сумматора подается на первый вход второго умножителя, выход второго умножителя соединен с блоком линейной части адаптивного регулятора, где сигнал подается на первый вход четвертого сумматора, выход четвертого сумматора соединен с блоком задания коэффициентов, выход блока задания коэффициентов соединен с третьим интегратором, выход третьего интегратора соединен с вторым входом четвертого сумматора, отличающаяся тем, что дополнительно вводятся второй блок задания коэффициентов, четвертый интегратор, пятый сумматор, третий блок задания коэффициентов, пятый интегратор, при этом выход первого интегратора подается на второй блок задания коэффициентов и на четвертый интегратор, сигнал с выхода четвертого интегратора подается на третий вход первого сумматора, сигнал с выхода второго блока задания коэффициентов поступает на четвертый вход первого сумматора, сигнал с выхода первого блока задания коэффициентов подается на первый вход пятого сумматора, на второй вход пятого сумматора подается сигнал с выхода пятого интегратора, сигнал с выхода пятого сумматора подается на третий блок задания коэффициентов, сигнал с выхода третьего блока задания коэффициентов подается на вход пятого интегратора и на выход адаптивного регулятора.
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2005 |
|
RU2282883C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2005 |
|
RU2288496C1 |
| Установка для увлажнения семян хлопчатника | 1988 |
|
SU1630629A1 |
| EP 1857894 A1, 21.11.2007. | |||

