Изобретение относится к автоматике и может быть использовано в системах управления астатическими объектами с запаздыванием, параметры которых - неизвестные постоянные или медленно меняющиеся во времени величины, а измерению доступен только выходной сигнал объекта, но не его производные.
Наиболее близким техническим решением к предлагаемому является система автоматического управления для астатических объектов с запаздыванием [Патент RU 2192030, МКИ 7 G 05 В 11/01, 2002], содержащая задатчик, первый сумматор, регулятор, объект регулирования, интегратор, второй сумматор, причем выход задатчика связан с суммирующим входом первого сумматора, выход которого подключен к входу регулятора, выход регулятора соединен с входом объекта регулирования и первым входом второго сумматора, выход объекта регулирования соединен со вторым входом первого сумматора, выход второго сумматора соединен с входом интегратора, выход которого соединен с соответствующим входом первого сумматора и вторым входом второго сумматора.
Недостатком этой системы является то, что при изменении параметров объекта управления может произойти не только значительное ухудшение качества ее функционирования, но и потеря в системе управления устойчивости.
Задачей изобретения является улучшение качества управления при медленном и существенном изменении параметров объекта.
Сущность изобретения состоит в том, что в систему, содержащей задатчик, первый сумматор, объект регулирования, интегратор, второй сумматор, причем выход задатчика связан с суммирующим входом первого сумматора, выход объекта регулирования соединен со вторым вычитающим входом первого сумматора, выход второго сумматора соединен с входом интегратора, выход интегратора соединен с соответствующим вычитающим входом первого сумматора и вычитающим входом второго сумматора, вместо блока регулятора используется блок адаптивного регулятора, первый вход адаптивного регулятора соединен с выходом задатчика, на второй вход адаптивного регулятора поступает сигнал с выхода первого сумматора, выход адаптивного регулятора соединен с входом объекта регулирования и суммирующим входом второго сумматора.
На фиг.1 представлена блок-схема предлагаемой адаптивной системы автоматического управления; на фиг.2 - схема блока адаптивного регулятора; на фиг.3 - схема блока линейной части адаптивного регулятора.
Система содержит задатчик сигнала 1, первый сумматор 2, адаптивный регулятор 3, объект регулирования 4, интегратор 5, второй сумматор 6.
Выход задатчика 1 связан с первым входом сумматора 2 и первым входом адаптивного регулятора 3, выход первого сумматора 2 подключен ко второму входу адаптивного регулятора 3, выход адаптивного регулятора соединен с входом объекта регулирования 4 и первым входом второго сумматора 6, выход объекта регулирования соединен со вторым входом первого сумматора 2, выход второго сумматора 6 соединен с входом интегратора 5, выход которого соединен с соответствующим входом первого сумматора 2 и вторым входом второго сумматора 6.
Объект регулирования описывается передаточной функцией вида
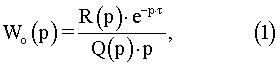
где р=d/dt - оператор дифференцирования, τ=const>0 - неизвестное постоянное запаздывание, R(p) - полином с произвольным расположением корней, Q(p) - гурвицев полином.
Адаптивный регулятор состоит из линейной и нелинейной части

где g(t) - выход нелинейной части, WL(p) - передаточная функция линейной части адаптивного регулятора, которая в нашем случае имеет вид реального дифференцирующего звена
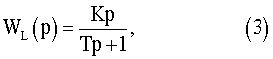
где К>0, Т>0 - соответственно коэффициент усиления и постоянная времени реального дифференцирующего звена.
Выход нелинейной части g(t) формируется следующим образом

где r - сигнал с выхода задатчика, c(t) - параметр, алгоритм настройки которого определяется следующим образом

где cИ(t), cП(t) - соответственно интегральная и пропорциональная составляющая настройки.
С помощью критерия гиперустойчивости Попова можно показать, что полученная система автоматического управления будет устойчивой, если параметры сИ(t), cП(t) определить следующим образом
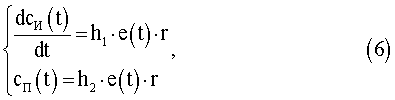
где h1, h2>0 - числа.
Система функционирует следующим образом.
Выходной сигнал U1=r задатчика 1 входного сигнала поступает на суммирующий вход первого сумматора 2 и на первый вход адаптивного регулятора 3. На выходе первого сумматора 2 формируется сигнал U2=e, который поступает на второй вход адаптивного регулятора 3. Управляющее воздействие U3=u с выхода адаптивного регулятора 3 подается одновременно на вход объекта 4 регулирования, на который действует аддитивное возмущение f, удовлетворяющее условиям

а также на суммирующий вход второго сумматора 6, на вычитающий вход которого поступает сигнал U5=Х1 с выхода интегратора 5. Во втором сумматоре 6 формируется сигнал  , μ=const>0, поступающий на вход интегратора 5, где интегрируется и поступает на второй вычитающий вход первого сумматора 2, на первый вычитающий вход которого подается сигнал U4=у с выхода объекта регулирования 4. Таким образом, первый сумматор 2 осуществляет алгебраическое суммирование трех сигналов с соответствующими коэффициентами U2=U1-U4-U5=r-у-β·X1, β=const>0.
, μ=const>0, поступающий на вход интегратора 5, где интегрируется и поступает на второй вычитающий вход первого сумматора 2, на первый вычитающий вход которого подается сигнал U4=у с выхода объекта регулирования 4. Таким образом, первый сумматор 2 осуществляет алгебраическое суммирование трех сигналов с соответствующими коэффициентами U2=U1-U4-U5=r-у-β·X1, β=const>0.
Функциональная схема адаптивного регулятора 3 приведена на фиг.2.
Выход первого сумматора 2 соединен с первым входом первого блока умножения 11, второй вход первого блока умножения 11 соединен с выходом задатчика 1, сигнал с выхода первого блока умножения 11 U11=е·r поступает на вход второго интегратора 10, первый вход третьего сумматора 9 соединен с выходом второго интегратора 10, второй вход третьего сумматора 9 соединен с выходом первого блока умножения 11. Таким образом, третий сумматор 9 осуществляет алгебраическое суммирование двух сигналов с соответствующими коэффициентами  Выход третьего блока суммирования 9 соединен с первым входом второго блока умножения 8, второй вход второго блока умножения 8 соединен с выходом задатчика 1, на выходе второго блока умножения 8 формируется сигнал U8=g, который поступает на вход блока линейной части адаптивного регулятора 7.
Выход третьего блока суммирования 9 соединен с первым входом второго блока умножения 8, второй вход второго блока умножения 8 соединен с выходом задатчика 1, на выходе второго блока умножения 8 формируется сигнал U8=g, который поступает на вход блока линейной части адаптивного регулятора 7.
Функциональная схема блока линейной части 7 адаптивного регулятора приведена на фиг.3.
Сигнал с выхода второго блока умножения 8 поступает на суммирующий вход четвертого сумматора 12, на второй вычитающий вход четвертого сумматора 12 с соответствующим коэффициентом  поступает сигнал с выхода третьего блока интегрирования 13, на вход третьего блока интегрирования 13 поступает сигнал U13=U3=u с выхода первого блока задания коэффициентов 14, в первом блоке задания коэффициентов 14 происходит умножение сигнала, поступающего с выхода четвертого блока суммирования 12 на коэффициент
поступает сигнал с выхода третьего блока интегрирования 13, на вход третьего блока интегрирования 13 поступает сигнал U13=U3=u с выхода первого блока задания коэффициентов 14, в первом блоке задания коэффициентов 14 происходит умножение сигнала, поступающего с выхода четвертого блока суммирования 12 на коэффициент 
Заменяя в системе обычный регулятор адаптивным, получают новую функцию, которая заключается в том, что при существенном изменении параметров объекта управления качество работы системы остается достаточно хорошим.
Данное устройство может быть реализовано промышленным способом, на основе стандартной элементарной базы.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2013 |
|
RU2513847C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2468406C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2459226C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2005 |
|
RU2282883C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ | 2001 |
|
RU2192030C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2010 |
|
RU2437137C2 |


Изобретение относится к автоматике и может быть использовано в системах управления астатическими объектами с запаздыванием, параметры которых - неизвестные постоянные или медленно меняющиеся во времени величины, а измерению доступен только выходной сигнал объекта, но не его производные. Технический результат заключается в улучшении качества управления при медленном и существенном изменении параметров объекта. Система содержит адаптивный регулятор, два элемента сравнения, интегратор и объект регулирования. 3 ил.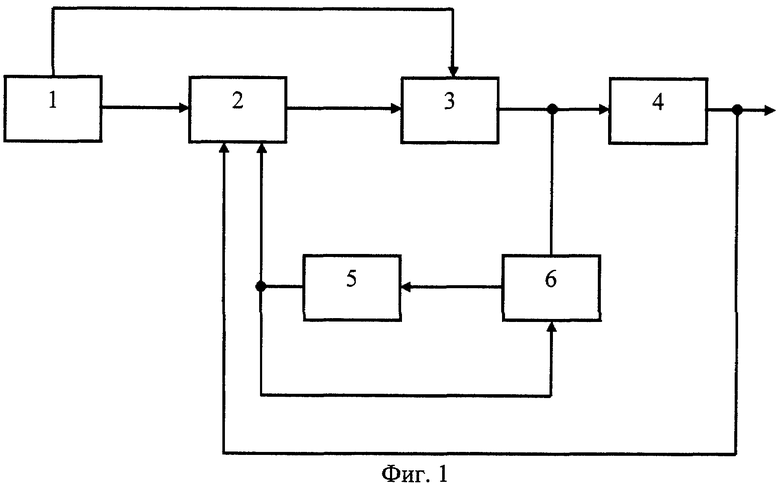
Адаптивная система управления астатическим объектом с запаздыванием, содержащая задатчик, первый сумматор, объект регулирования, интегратор, второй сумматор, причем выход задатчика связан с суммирующим входом первого сумматора, выход объекта регулирования соединен со вторым вычитающим входом первого сумматора, выход второго сумматора соединен с входом интегратора, выход интегратора соединен с соответствующим вычитающим входом первого сумматора и вычитающим входом второго сумматора, отличающаяся тем, что система управления содержит адаптивный регулятор, выход которого соединен с входом объекта регулирования и суммирующим входом второго сумматора, причем адаптивный регулятор состоит из нелинейной и линейной частей, линейная часть адаптивного регулятора имеет передаточную функцию реального дифференцирующего звена, а нелинейная часть содержит два блока умножения, третий сумматор и второй интегратор, причем выход первого сумматора соединен с первым входом первого блока умножения, второй вход первого блока умножения соединен с выходом задатчика, сигнал с выхода первого блока умножения поступает на вход второго интегратора, первый вход третьего сумматора соединен с выходом второго интегратора, второй вход третьего сумматора соединен с выходом первого блока умножения, выход третьего сумматора соединен с первым входом второго блока умножения, второй вход второго блока умножения соединен с выходом задатчика, сигнал с выхода второго блока умножения поступает на вход линейной части адаптивного регулятора.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ | 2001 |
|
RU2192030C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| АДАПТИВНАЯ СИСТЕМА С ПЕРЕМЕННОЙ СТРУКТУРОЙ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ ПОДВОДНОГО РОБОТА | 2002 |
|
RU2215318C1 |
| WO 9940360 A1, 12.08.1999. | |||

