Объектами настоящего изобретения являются способ регулирования напряжения или тока фильтра RLC, носитель информации и транспортные средства для применения этого способа.
В частности, заявителю известны способы регулирования напряжения Uc между первой и второй точками полосового фильтра RLC с собственным периодом Tf, при этом фильтр RLC содержит две входные точки, электрически соединенные соответственно с проводниками шины постоянного тока DC электрического транспортного средства, питаемого от контактной сети, при этом первая и вторая выходные точки электрически соединены с управляемым электрическим преобразователем, позволяющим управлять моментом, создаваемым тяговым электрическим двигателем электрического транспортного средства, при этом постоянная τ времени статора этого двигателя строго меньше собственного периода Tf.
Эти способы регулирования содержат измерение или оценку силы I1i линейного тока I1, проходящего через индуктивность фильтра в момент ti, напряжения Uci между выходными точками фильтра в момент ti и линейного напряжения U1 между входными точками фильтра.
Заявителю известны также способы регулирования линейного тока I1, проходящего через индуктивность L полосового фильтра RLC с собственным периодом Tf, при этом фильтр содержит:
- две входные точки, электрически соединенные соответственно с проводниками шины постоянного тока DC электрического транспортного средства, питаемого от контактной сети,
- первую и вторую выходные точки, электрически соединенные с управляемым электрическим преобразователем, предназначенным для изменения момента тягового электрического двигателя электрического транспортного средства, при этом постоянная τ времени статора этого электрического двигателя строго меньше собственного периода Tf.
Эти способы регулирования содержат измерение или оценку силы I1i линейного тока I1 в момент ti, напряжения Uci между выходными точками фильтра в момент ti и линейного напряжения U1 между входными точками фильтра.
В данном случае под «контактной линией» следует понимать как воздушную линию, по которой скользит пантограф для подачи питания на электрическое транспортное средство, так и рельс, установленный на земле, по которому скользит токосъемный башмак для подачи питания на электрическое транспортное средство. Этот рельс, установленный на земле, наиболее известен под названием «третий рельс».
Постоянную τ времени статора электрического двигателя определяют при помощи следующего отношения:

где:
- Lm - индуктивность статора электрического двигателя, и
- Rm - сопротивление статора электрического двигателя.
Эта постоянная времени обычно находится в пределах от 4 мс до 200 мс для тяговых электрических двигателей электрического транспортного средства.
Собственный период Tf фильтра RLC определяют при помощи следующей формулы:
Этот собственный период Tf должен быть строго больше постоянной τ времени двигателя, в противном случае фильтр RLC не сможет выполнять свою функцию полосового фильтра при быстрых колебаниях тока, потребляемого или производимого двигателем. Фильтр RLC предназначен также для снижения полного сопротивления источника или полного сопротивления нагрузки для преобразователя.
В данном случае время ускорения электрического двигателя определяют как время, необходимое для изменения его скорости на существенное значение, например, на 1/1000 от максимальной скорости при максимальном крутящем моменте.
В известных способах регулирование предполагает использование цепи обратной связи для определения разности между заданным значением напряжения Ucc между выходными точками фильтра или заданным значением линейного тока I1c и измеренным значением. Эти способы работают правильно, но не позволяют быстро реагировать на резкие изменения линейного напряжения U1 или противодействующего момента двигателя. Например, эти резкие изменения линейного напряжения U1 или противодействующего момента могут возникать:
- в случае схода пантографа с контактной сети, то есть когда пантограф теряет механический и электрический контакт с контактной сетью,
- в случае повторного соединения пантографа с контактной сетью, то есть когда пантограф восстанавливает механический и электрический контакт с контактной сетью, или
- в случае потери сцепления между ведущими колесами электрического транспортного средства и опорой качения.
Настоящее изобретение призвано решить эти проблемы при помощи более быстрого способа регулирования напряжения Uc или линейного тока I1.
В этой связи его объектом является способ мгновенного ответного регулирования напряжения Uc, при этом способ включает в себя:
- вычисление заданного значения тока  при средней силе
при средней силе  постоянного тока Iu, проходящего через первую выходную точку фильтра между моментом ti и моментом ti+1, при этом указанное заданное значение
постоянного тока Iu, проходящего через первую выходную точку фильтра между моментом ti и моментом ti+1, при этом указанное заданное значение  устанавливают из уравнений дискретных состояний фильтра таким образом, чтобы напряжение Uc было равно заранее определенному заданному значению напряжения Ucc в момент ti+1, при этом указанные уравнения дискретных состояний связывают между собой значения силы I1i, I1i+1 линейного тока I1 соответственно в моменты ti и ti+1, значения напряжений Uci и Uc,i+1 между выходными точками фильтра соответственно в моменты ti и ti+1, среднее линейное напряжение
устанавливают из уравнений дискретных состояний фильтра таким образом, чтобы напряжение Uc было равно заранее определенному заданному значению напряжения Ucc в момент ti+1, при этом указанные уравнения дискретных состояний связывают между собой значения силы I1i, I1i+1 линейного тока I1 соответственно в моменты ti и ti+1, значения напряжений Uci и Uc,i+1 между выходными точками фильтра соответственно в моменты ti и ti+1, среднее линейное напряжение  между моментами ti и ti+1 и среднюю силу тока
между моментами ti и ti+1 и среднюю силу тока  ,
,
- управление электрическим преобразователем для получения тока Iu, который проходит через выходную точку фильтра и средняя сила  которого между моментами ti и ti+1 равна заданному значению тока
которого между моментами ti и ti+1 равна заданному значению тока  , при этом интервал Т времени между моментами ti и ti+1 должен быть строго меньше 5τ.
, при этом интервал Т времени между моментами ti и ti+1 должен быть строго меньше 5τ.
Объектом настоящего изобретения является также способ мгновенного ответного регулирования силы линейного тока I1, включающий в себя:
- вычисление заданного значения тока при средней силе  постоянного тока Iu, проходящего через первую выходную точку фильтра между моментом ti и моментом ti+1, причем это заданное значение выводят из уравнений дискретных состояний фильтра таким образом, чтобы напряжение Uc было равно заранее определенному заданному значению напряжения Ucc в момент ti+1, при этом уравнения дискретных состояний связывают между собой значения силы I1i, I1,i+1 линейного тока I1 соответственно в моменты ti и ti+1, значения напряжения Uci и Uc,i+1 между выходными точками фильтра соответственно в моменты ti и ti+1, среднее линейное напряжение
постоянного тока Iu, проходящего через первую выходную точку фильтра между моментом ti и моментом ti+1, причем это заданное значение выводят из уравнений дискретных состояний фильтра таким образом, чтобы напряжение Uc было равно заранее определенному заданному значению напряжения Ucc в момент ti+1, при этом уравнения дискретных состояний связывают между собой значения силы I1i, I1,i+1 линейного тока I1 соответственно в моменты ti и ti+1, значения напряжения Uci и Uc,i+1 между выходными точками фильтра соответственно в моменты ti и ti+1, среднее линейное напряжение  между моментами ti и ti+1 и среднюю силу тока
между моментами ti и ti+1 и среднюю силу тока  ,
,
- управление электрическим преобразователем для получения тока Iu, который проходит через выходную точку фильтра и средняя сила которого между моментами ti и ti+1 равна заданному значению тока , при этом интервал Т времени между моментами ti и ti+1 должен быть строго меньше 5τ.
Способы мгновенного ответного регулирования более известны под английским термином "Deadbeat Control". Эти способы позволяют достичь заданное значение в ближайший момент регулирования ti+1. Для этого в данных способах не используют цепь обратной связи.
Более конкретно, в вышеупомянутых способах мгновенного ответного регулирования среднее заданное значение силы тока определяют из уравнений дискретных состояний фильтра RLC без использования цепи обратной связи. Таким образом, эти способы гарантируют, что напряжение Uc или линейный ток I1 достигает своего заданного значения точно в конце интервала Т. Кроме того, поскольку интервал Т в данном случае выбирают малым, то есть в пять раз меньше постоянной τ времени двигателя, эти способы реагируют намного быстрее, чем способы регулирования с использованием цепи обратной связи. В этих условиях ограничение скачков линейного напряжения U1 или скачков линейного тока I1 происходит гораздо эффективнее, в частности, в случае схода или повторного соединения пантографа или в случае потери сцепления.
Следует также отметить, что корректировки средней силы тока происходят в интервалы Т менее 5τ. Таким образом, интервалы Т являются намного меньшими времени ускорения электрического двигателя, учитывая инерцию электрического транспортного средства, приведенную к валу двигателя, и инерцию ротора самого электрического двигателя, поэтому они не ощущаются водителем или пассажирами этого транспортного средства. Они не влияют также на способ управления моментом электрического двигателя.
Варианты осуществления способа регулирования напряжения Uc могут содержать один или несколько следующих признаков:
- заданное значение напряжения Ucc выбирают систематически меньшим или равным предельному напряжению Ucmax, при этом предельное напряжение Ucmax соответствует допустимому максимальному напряжению на входе электрического преобразователя или между выходными точками фильтра;
- производят оценку величины I1p линейного тока I1, которая будет достигнута, если напряжение Uc равно заданному значению напряжения Ucc в момент ti+1,
- осуществляют сравнение оценочной величины I1p, по меньшей мере, с одним заранее определенным предельным значением линейного тока I1m,
- только, если заранее определенное предельное значение линейного тока I1m пройдено, производят изменение заданного значения напряжения Ucc таким образом, чтобы получить временное заданное значение напряжения Uccm, которое соответствует оценочной величине I1p линейного тока, которая не превышает заранее определенное предельное значение линейного тока I1m, и временное заданное значение напряжения Uccm используют вместо заданного значения напряжения Ucc во время вычисления заданного значения среднего тока только для текущего интервала Т;
- если заранее определенный предел I1m не пройден, используют заданное значение напряжения Ucc для вычисления заданного значения среднего тока для текущего интервала Т;
- заданное значение является результатом решения следующей системы уравнений:


где:
- R и L - соответственно значения сопротивления и индуктивности фильтра RLC, последовательно соединенных между первыми входными и выходными точками,
- С - емкость конденсатора, соединенного между первой и второй выходными точками,
- µ1 и µ2 - собственные значения матрицы изменения, определенные при помощи следующего уравнения:


- a1 и а2 - значения, определенные при помощи следующих уравнений:
- заданное значение напряжения Ucc определяют на основе линейного напряжения U1 таким образом, чтобы его спектр мощности не содержал никаких гармоник сверх частоты 0,9/Tf.
Варианты осуществления способа регулирования напряжения Uc имеют также следующие преимущества:
- поддержание напряжения Uc на уровне ниже предела Ucmax позволяет избежать случайных срабатываний защитного устройства, такого как реостатный ограничитель, позволяющий ограничивать любое перенапряжение на шине DC,
- использование временного заданного значения напряжения Uccm позволяет сохранять силу линейного тока I1 в допустимом диапазоне при одновременном ограничении колебаний напряжения Uc, и
- выбор заданного значения напряжения Ucc осуществляют таким образом, чтобы его спектр мощности не содержал никаких гармоник сверх частоты 0,9/Tf, что позволяет одновременно избежать колебаний линейного тока Ii и напряжения Uc конденсатора в области собственной частоты фильтра, а также минимизировать энергию, необходимую для управления.
Варианты осуществления способа регулирования силы линейного тока I1 могут содержать один или несколько следующих признаков:
- заданное значение линейного тока I1с выбирают систематически меньшим или равным предельному значению I1max, при этом предельное значение I1max соответствует значению силы линейного тока I1, при котором срабатывает прерыватель подстанции питания контактной сети или прерыватель транспортного средства;
- заданное значение линейного тока I1c выбирают систематически превышающим или равным предельному значению I1min, при этом предельное значение I1min соответствует значению силы линейного тока, ниже которого индуктивность L фильтра будет ненасыщенной;
- производят оценку величины Ucp напряжения Uc, которая будет достигнута между выходными точками в момент ti+1, если сила линейного тока I1 равна заданному значению I1c в момент ti+1,
- осуществляют сравнение оценочной величины напряжения Ucp, по меньшей мере, с одним заранее определенным предельным значением Ucm,
- только, если заранее определенное предельное значение напряжения Ucm пройдено, производят изменение заданного значения линейного тока I1c таким образом, чтобы получить временное заданное значение линейного тока I1cm, которое соответствует оценочной величине напряжения Ucp, которая не превышает заранее определенное предельное значение Ucm, и временное заданное значение линейного тока I1cm используют вместо заданного значения линейного тока I1c во время вычисления заданного значения линейного тока I1c при управлении преобразователем только во время текущего интервала Т; и
- если заранее определенное предельное значение напряжения Ucm не пройдено, используют заданное значение линейного тока I1с во время вычисления заданного значения среднего тока для текущего интервала Т;
- заданное значение является решением следующей системы уравнений:


где:
- R и L - соответственно значения сопротивления и индуктивности фильтра RLC, последовательно соединенных между первыми входной и выходной точками,
- С - емкость конденсатора, соединенного между первой и второй выходными точками,
- µ1 и µ2 - собственные значения матрицы изменения, определенные при помощи следующих соотношений:

- a1 и а2 - значения, определенные при помощи следующих соотношений:
- первая фаза регулирования только напряжения Uc между первой и второй выходными точками фильтра,
- вторая фаза регулирования только линейного тока I1,
- переход от первой фазы ко второй фазе, как только линейный ток I1 проходит предельное значение I1m, и переход от второй фазы к первой фазе, как только линейный ток I1 проходит это же или другое предельное значение в обратном направлении.
Варианты осуществления способа регулирования линейного тока I1 имеют также следующие преимущества:
- выбор заданного значения линейного тока I1c меньше предельного значения I1max позволяет систематически избегать несвоевременного срабатывания прерывателя подстанции или защитного прерывателя приборов самого транспортного средства,
- выбор заданного значения линейного тока I1c, систематически превышающего предельное значение I1min, позволяет систематически поддерживать индуктивность L насыщенной и, следовательно, оставаться в линейной рабочей зоне, благодаря чему индуктивность L резко не высвобождает большого количества энергии при снижении ее насыщения,
- использование временного заданного значения линейного тока I1cm позволяет всегда поддерживать напряжение Uc в допустимом рабочем диапазоне при одновременном ограничении колебаний линейного тока I1,
- чередование фаз регулирования только напряжения Uc и только линейного тока I1 позволяет поддерживать одновременно напряжение Uc и линейный ток I1 в допустимых рабочих диапазонах.
Способы регулирования напряжения Uc или линейного тока I1 могут содержать один или несколько следующих признаков:
- способ содержит управление реостатом, чтобы в комбинации с управлением преобразователем получать ток Iu, который проходит через первый выходной контакт и средняя сила которого между моментами ti и ti+1 равна заданному значению тока ;
- интервал Т меньше или равен τ/5.
Описанные выше варианты осуществления способов регулирования напряжения Uc или линейного тока I1 имеют также следующие преимущества:
- использование, кроме преобразователя, реостата для получения тока Iu позволяет компенсировать изменение напряжения Uc или линейного тока I1 быстрее, чем при использовании только преобразователя,
- выбор интервала Т, меньшего или равного τ/5, позволяет ограничить амплитуду изменений тока Iu, что улучшает характеристики способа регулирования.
Объектом настоящего изобретения является также носитель для записи информации, содержащий команды для выполнения любого из указанных выше способов регулирования, при этом указанные команды исполняются электронным вычислительным устройством.
Объектом настоящего изобретения является также электрическое транспортное средство, содержащее:
- шину DC, образованную двумя проводниками,
- по меньшей мере, один тяговый двигатель электрического транспортного средства с постоянной τ времени статора,
- управляемый электрический преобразователь, выполненный с возможностью изменения момента тягового двигателя,
- полосовой фильтр RLC, содержащий две входные точки, электрически соединенные соответственно с двумя проводниками шины DC, и первую и вторую выходные точки, электрически соединенные с электрическим преобразователем,
- датчики или эстиматоры, выполненные с возможностью измерения или оценки силы I1i линейного тока I1, проходящего через индуктивность фильтра в момент ti, напряжения Uci между выходными точками фильтра в момент ti, линейного напряжения U1 между входными точками фильтра;
- устройство для вычисления заданного значения тока для средней силы , постоянного тока Iu, проходящего через первую выходную точку между моментом ti и моментом ti+1, причем это заданное значение тока выводят из уравнений дискретных состояний фильтра таким образом, чтобы напряжение Uc было равно заранее определенному заданному значению напряжения Ucc в момент ti+1, при этом указанные уравнения дискретных состояний связывают между собой значения силы I1i, I1,i+1 линейного тока I1 соответственно в моменты ti и ti+1, значения напряжения Uci и Uc,i+1 между выходными точками фильтра соответственно в моменты ti и ti+1, среднее линейное напряжение  между моментами ti и ti+1 и среднюю силу тока ,
между моментами ti и ti+1 и среднюю силу тока ,
- блок управления электрическим преобразователем для получения тока Iu, который проходит через выходную точку и средняя сила которого между моментами ti и ti+1 равна заданному значению тока , при этом интервал Т времени между моментами ti и ti+1 строго меньше 5τ.
Объектом настоящего изобретения является также другое электрическое транспортное средство, содержащее:
- устройство для вычисления заданного значения тока для средней силы , постоянного тока Iu, проходящего через первую выходную точку между моментом ti и моментом ti+1, причем это заданное значение тока выводят из уравнений дискретных состояний фильтра таким образом, чтобы сила линейного тока I1 была равна заранее определенному заданному значению линейного тока I1 в момент ti+1, при этом указанные уравнения дискретных состояний связывают между собой значения силы I1i, I1,i+1 линейного тока I1 соответственно в моменты ti и ti+1, значения напряжения Uci и Uc,i+1 между выходными точками фильтра соответственно в моменты ti и ti+1, среднее линейное напряжение  между моментами ti и ti+1 и среднюю силу тока ,
между моментами ti и ti+1 и среднюю силу тока ,
- блок управления электрическим преобразователем для получения тока Iu, который проходит через выходную точку и средняя сила которого между моментами ti и ti+1 равна заданному значению тока , при этом интервал Т времени между моментами ti и ti+1 строго меньше 5τ.
Настоящее изобретение будет более очевидно из нижеследующего описания, представленного исключительно в качестве не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
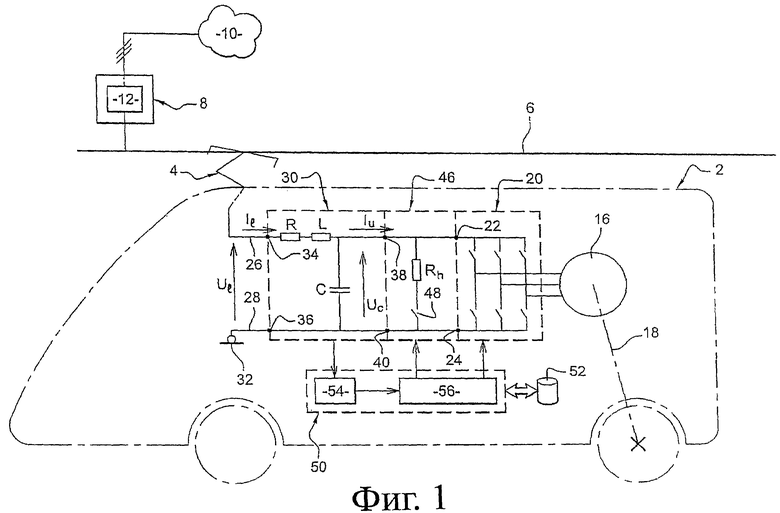
фиг.1 - схематичный вид электрического транспортного средства, оборудованного фильтром RLC на входе электрического преобразователя;
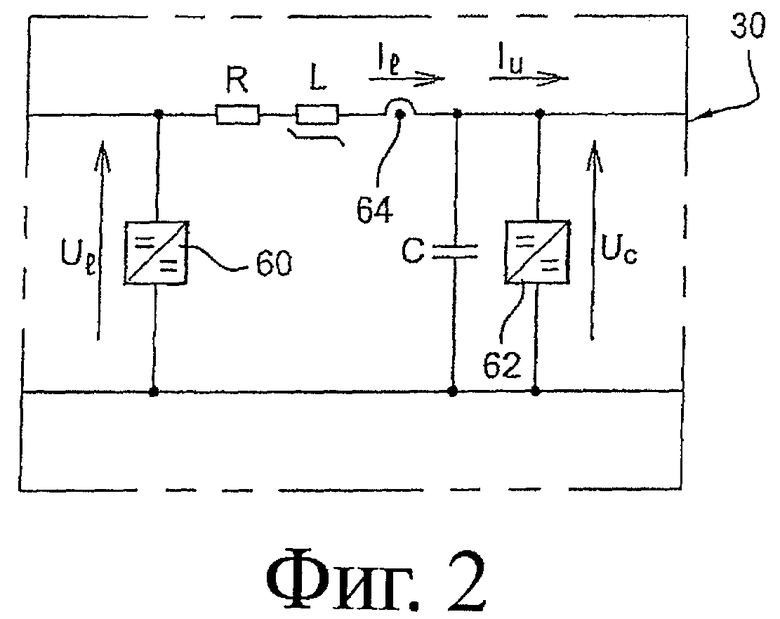
фиг.2 - упрощенная эквивалентная схема фильтра RLC транспортного средства, показанного на фиг.1;
фиг.3 и 4 - блок-схемы способа мгновенного ответного регулирования соответственно напряжения Uc и линейного тока I1 фильтра RLC транспортного средства, показанного на фиг.1;
фиг.5 - диаграмма состояния способа мгновенного ответного регулирования одновременно напряжения Uc и линейного тока I1 фильтра RLC, показанного на фиг.1;
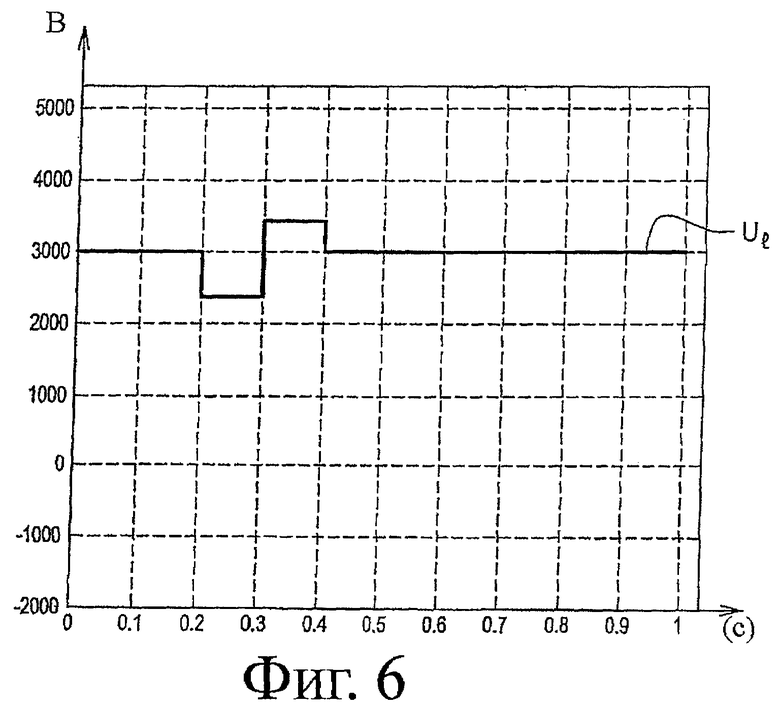
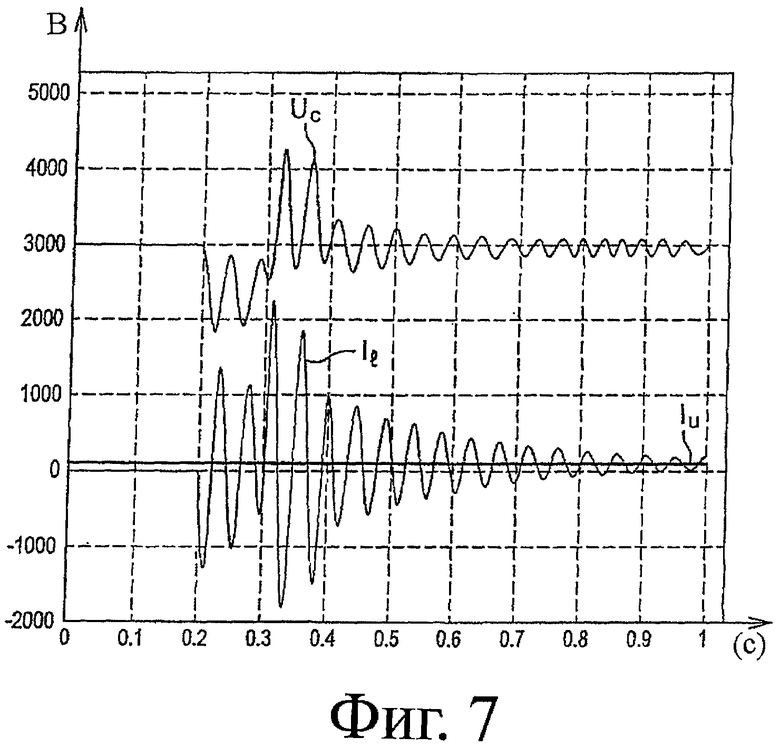
фиг.6 - иллюстрация возмущения линейного напряжения U1;
фиг.7 - график, показывающий временное изменение напряжения Uc, линейного тока I1 и тока Iu в ответ на возмущение, показанное на графике фиг.6, без использования способов, показанных на фиг.3 и 4;
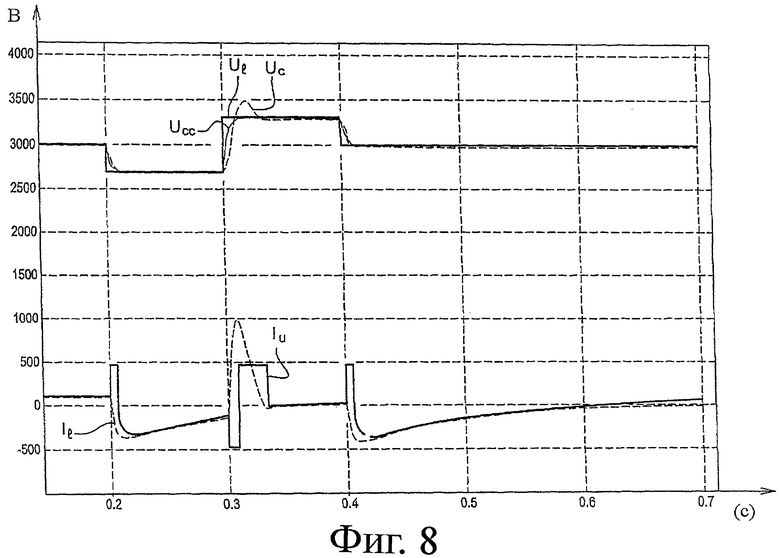
фиг.8 - график временного изменение тех же величин, показанных на фиг.7, но в случае применения способа регулирования, показанного на фиг.5.
На этих фигурах одинаковые элементы обозначены одинаковыми позициями.
В дальнейшем тексте описание характеристик и функций, хорошо известных специалистам, опускается.
На фиг.1 показано электрическое транспортное средство 2, оборудованное пантографом 4, скользящим по воздушной контактной линии 6. Транспортное средство 2 является, например, железнодорожным транспортным средством, таким как поезд. В этом примере контактная сеть питается постоянным током от нескольких подстанций, расположенных через равные промежутки вдоль контактной линии 6. Эти подстанции расположены, например, на расстоянии друг от друга, превышающем несколько километров.
Для упрощения на фиг.1 показана только одна подстанция 8. Эта подстанция 8 преобразует трехфазное напряжение в постоянное напряжение, подаваемое в сеть 6. Обычно подстанция 8 содержит прерыватель 12, выполненный с возможностью отключения контактной линии 6 от сети 10, если ток в контактной линии 6 превышает предельное значение Imax.
Транспортное средство 2 оборудовано электрическим двигателем 16, выполненным с возможностью приведения во вращение ведущих колес транспортного средства через приводной вал 18.
В данном случае двигатель 16 является синхронным или асинхронным трехфазным двигателем. Этот двигатель 16 питается от электрического преобразователя 20, выполненного с возможностью генерирования трехфазного напряжения питания двигателя 16 из постоянного напряжения Uc. Двигатель может работать как в режиме тягового двигателя, так и в режиме генератора трехфазного напряжения, например, когда происходит торможение транспортного средства.
Постоянная τ времени статора двигателя 16 составляет от 4 мс до 100 мс.
В данном случае преобразователь 20 содержит три плеча, соединенные параллельно между входными точками 22 и 24. Каждое плечо содержит два управляемых выключателя, соединенных параллельно через центральный мост. Каждый центральный мост соединен с соответствующей фазой двигателя 16.
Точки 22 и 24 соответственно соединены с проводниками 26 и 28 шины DC через фильтр RLC 30.
Проводник 26 электрически соединен с пантографом 4 через различные не показанные на фигуре устройства, например, такие как прерыватель, трансформатор и выпрямительный мост, таким образом, чтобы получать постоянное напряжение от контактной линии 6. Проводник 28 электрически соединен с потенциалом земли 32 через рельсы железной дороги или со вторым проводником, который может быть воздушным или в виде рельса, установленного на земле, по которому скользят токосъемные башмаки.
Фильтр 30 является полосовым фильтром RLC, собственный период Tf которого строго превышает постоянную времени τ двигателя 16. Предпочтительно собственный период Tf фильтра 30 превышает постоянную времени τ двигателя 16, по меньшей мере, в пять или десять раз, чтобы выполнять свою функцию фильтрования.
Фильтр 30 содержит две входные точки 34 и 36, соединенные соответственно с проводниками 26 и 28, чтобы получать между этими входными точками линейное напряжение U1. Фильтр 30 содержит также две выходные точки 38 и 40, электрически соединенные соответственно с входными точками 22 и 24 преобразователя 20. Между точками 34 и 38 последовательно соединены сопротивление R и индуктивность L. В данном случае сопротивление R и индуктивность L показаны в виде двух разных элементов. Однако на практике сопротивление R и индуктивность L могут быть выполнены в виде одного компонента, например, в виде катушки.
Ток, проходящий через индуктивность L, обозначен I1. Этот ток называют линейным током.
Фильтр 30 содержит также конденсатор С, электрически соединенный непосредственно между выходными точками 38 и 40. Напряжение между контактами этого конденсатора С обозначен Uc. Ток, проходящий через точку 38, обозначен Iu.
Транспортное средство 2 может также содержать реостат 46 электрического торможения, соединенный между точками 38 и 40 и точками 22 и 24. Обычно этот реостат 46 предназначен для рассеяния электрической энергии, производимой двигателем 16, когда он работает в режиме генератора и когда контактная линия 6 или транспортное средство 2 не в состоянии воспринимать энергию торможения. Например, реостат 46 содержит сопротивление Rh, последовательно соединенное с управляемым выключателем 48 между выходными точками 38 и 40. Выключатель выполнен управляемым с возможностью регулирования силы тока, проходящего через резистор Rh.
Транспортное средство 2 также содержит блок 50 управления реостатом 46 и преобразователем 20 на основании измерений, осуществляемых на уровне фильтра 30. Для этого блок 50 соединен с запоминающим устройством 52, содержащим команды для выполнения одного из способов, показанных на фиг.3-5. Запоминающее устройство 52 содержит также значения различных рабочих пределов, которые будут более подробно описаны со ссылками на фиг.3 и 4.
Блок 50 содержит одно или несколько электронных вычислительных устройств.
В данном случае блок 50 содержит вычислительное устройство 54, выполненное с возможностью определения заданного значения для средней силы постоянного тока Iu в интервале Т на основании измерений, произведенных на уровне фильтра 30.
Блок 50 содержит также блок 56 управления, выполненный с возможностью управления одновременно реостатом 46 и преобразователем 20 для достижения заданного значения . Для этого блок 56 соединяют с реостатом 46 и с преобразователем 20. Блок 56 выполнен также с возможностью управления преобразователем 20 в зависимости от заданного значения Гс момента, создаваемого двигателем 16, для ускорения или торможения транспортного средства 2.
На фиг.2 показана упрощенная электрическая схема фильтра 30, на которой представлены различные условные обозначения для линейного напряжения U1, линейного тока I1 и напряжения Uc. На фиг.2 показаны датчики 60, 62 и 64 соответственно линейного напряжения U1, напряжения Uc и линейного тока I1. Эти датчики 60, 62 и 64 соединены с вычислительным устройством 54.
На фиг.3 показан способ мгновенного ответного регулирования напряжения Uc, осуществляемый блоком 50 управления.
Сначала во время этапа 80 выбирают период дискретизации Т. В дальнейшем тексте данного описания обозначением ti обозначают момент, в который дискретно измеряют датчиками 60, 62 и 64 различные значения, а обозначением ti+1 - следующий момент дискретных изменений. Эти моменты ti и ti+1 отделены друг от друга интервалом Т времени.
В данном случае интервал Т выбирают достаточно малым, чтобы за один только интервал Т сила тока Iu не успела достичь своего асимптотического значения, то есть Uc/Rm, где Rm является сопротивлением статора двигателя 16. Это асимптотическое значение может доходить до стократного значения верхнего предела Iumax, допустимого для силы тока Iu. Поэтому интервал Т выбирают строго меньшим 5τ. Предпочтительно интервал Т выбирают меньшим τ/5 или τ/10. В данном случае для электрических транспортных средств, как правило, интервал Т меньше 20 мс.
Предпочтительно также выбирают интервал Т не слишком малым, чтобы сила тока Iu успевала существенно измениться между моментами ti и ti+1. Поэтому в данном случае интервал Т выбирают большим 100 мкс.
После этого в момент ti во время этапа 82 измеряют напряжение Uc, линейное напряжение U1 и линейный ток I1. Результаты этих измерений соответственно обозначают Uci, U1i и I1i. Во время этапа 82 можно также вычислить значение индуктивности L фильтра 30, если она меняется в зависимости от тока I1.
На следующем этапе 84 устанавливают заданное значение Ucc для напряжения Uc. Например, заданное значение напряжения Ucc определяют на основании среднего значения напряжений U1, измеренных в предыдущие моменты дискретизации. Среднее значение определяют за период времени, строго превышающий собственный период Tf фильтра 30 и предпочтительно, по меньшей мере, в 10 раз превышающий собственный период Tf. Например, заданное значение напряжения Ucc определяют при помощи следующего соотношения:

где:
- N - число интервалов Т, принимаемое в расчет для вычисления среднего значения,
- напряжения U1i являются линейными напряжениями, измеренными в предыдущие моменты i,
- I1i - значения силы линейного тока I1, измеренные в предыдущие моменты ti, и
- R - сопротивление фильтра 30.
Затем на этапе 86 производят оценку величины I1p силы тока I1, которая будет достигнута в момент ti+1, если в момент ti+1 напряжение Uc равно заданному значению напряжения Ucc. Например, оценку величины I1p производят при помощи следующего соотношения:

где:
- С - значение емкости конденсатора С фильтра 30,
- - среднее значение напряжения U1 за интервал Т,
- µ1, µ2, a1 a2 определены выше,
- ех - экспоненциальная функция.
В данном случае предполагают, что линейное напряжение является постоянным в течение интервала Т, то есть среднее значение равно U1i.
µ1 и µ2 являются собственными значениями матрицы изменения фильтра 30. Эти значения определяют при помощи следующих соотношений:


где R, С и L являются соответственно значениями сопротивления R, емкости С и значением индуктивности L фильтра 30.
a1 и а2 определяют при помощи следующих соотношений:


Соотношение (2) получают из уравнений дискретных состояний фильтра 30 после исключения величины в следующей системе уравнений (7) и (8):


где:
- Uci и I1i являются напряжением Uc и силой тока I1, измеренными в момент ti,
- I1,i+1 и Uc,i+1 являются силой тока I1 и напряжением Uc в момент ti+1.
Учитывая, что рассматриваемый способ регулирования является способом мгновенного ответного регулирования, в момент ti+1 напряжение Uc,i+1 равно заданному значению напряжения Ucc. Кроме того, предположив, что линейное напряжение U1 является постоянным в течение интервала Т, среднее значение напряжения равно U1i. В этих условиях соотношения (7) и (8) образуют систему двух уравнений с двумя неизвестными, а именно I1,i+1 и . Таким образом, эту систему уравнений можно решить аналитически для оценки величины I1p (2), которая соответствует значению I1,i+1, исключив в системе уравнений (7) и (8).
Получение соотношений (7) и (8) более подробно описано в конце этого описания в разделе под названием «Получение уравнений дискретных состояний».
После этого на этапе 88 оценочную величину I1p сравнивают с рабочими пределами I1min и I1max, в диапазоне которых должна оставаться сила линейного тока I1. Например, предел I1min выбирают таким образом, чтобы он соответствовал насыщенному состоянию индуктивности L, что позволяет поддерживать индуктивность L насыщенной, пока выполняется способ, показанный на фиг.3. Это позволяет избежать внезапного высвобождения индуктивностью большого количества энергии при падении ее насыщения. Предел I1max определяют в отношении прерывателя 12 или прерывателя, установленного на транспортном средстве для защиты его приборов в соответствии с их соответствующим пределом срабатывания на транспортном средстве. Для прерывателя 12 этот предел срабатывания учитывают для каждого транспортного средства в зависимости от числа транспортных средств, которые могут двигаться одновременно на участке пути, питаемом подстанцией, защищенной прерывателем 12, например: предел отключения подстанции, поделенный на максимальное число транспортных средств.
Если оценочная величина I1p не входит в диапазон [I1min, I1max], на этапе 90 вычислительное устройство 54 изменяет заданное значение напряжения Ucc для получения временного заданного значения напряжения Uccm, которое позволяет получить в момент ti+1 силу тока I1, находящуюся в диапазоне [I1min, I1max]. Например, временное заданное значение напряжения Uccm получают при помощи следующего соотношения:

где I1m является предельным значением линейного тока I1, выбранным в системе {I1min; I1max}.
В частности, I1m выбирают равным I1min, если оценочная величина I1p, полученная на этапе 86, меньше, чем предел I1min. В противном случае, то есть, если эта оценочная величина больше предела I1max, значение силы тока I1m выбирают равным пределу I1max.
Отношение (9) позволяет получить временное заданное значение напряжения Uccm, самое близкое к первоначальному заданному значению напряжения Ucc, сохраняя при этом силу линейного тока I1 в диапазоне [I1min, I1max].
После этапа 90 на этапе 92 вычислительное устройство 54 вычисляет заданное значение тока для средней силы тока Iu между моментами ti и ti+1.
Если во время этапа 88 оценочная величина I1p входит в диапазон [I1min, I1max], то вычислительное устройство 54 переходит непосредственно к этапу 92.
Заданное значение определяют аналитически таким образом, чтобы в момент ti+1 напряжение Uc было строго равно заданному значению напряжения Ucc или временному заданному значению напряжения Uccm, если этап 90 выполнялся. Например, заданное значение тока получают при помощи следующего соотношения:

Соотношение (10) получают путем решения уравнений дискретных состояний, представляющих собой соотношения (7) и (8), для выделения неизвестной величины после исключения I1,i+1 в системе уравнений (7) и (8).
После этого на этапе 94 заданное значение тока сравнивают с заранее определенным допустимым рабочим диапазоном  .
.
Например, предел  выбирают равным минимальной средней силе тока Iu, который может быть создан преобразователем 20, когда двигатель 16 работает в режиме генератора. Это среднее значение определяют за период Т дискретизации. Предел
выбирают равным минимальной средней силе тока Iu, который может быть создан преобразователем 20, когда двигатель 16 работает в режиме генератора. Это среднее значение определяют за период Т дискретизации. Предел  является отрицательным, так как двигатель работает в режиме генератора.
является отрицательным, так как двигатель работает в режиме генератора.
Что же касается предела  то его выбирают, например, равным сумме максимальной средней силы тока, который может быть поглощен реостатом 46, и максимальной средней силы тока, который может быть поглощен преобразователем 20. Максимальная средняя сила тока, поглощаемая преобразователем 20, зависит от электрических характеристик этого преобразователя. Максимальная средняя сила тока, поглощаемая реостатом, выражается, например, соотношением допустимого максимального напряжения Ucmax между проводниками 26 и 28 к значению сопротивления Rh. Эти средние значения определяют за период Т дискретизации.
то его выбирают, например, равным сумме максимальной средней силы тока, который может быть поглощен реостатом 46, и максимальной средней силы тока, который может быть поглощен преобразователем 20. Максимальная средняя сила тока, поглощаемая преобразователем 20, зависит от электрических характеристик этого преобразователя. Максимальная средняя сила тока, поглощаемая реостатом, выражается, например, соотношением допустимого максимального напряжения Ucmax между проводниками 26 и 28 к значению сопротивления Rh. Эти средние значения определяют за период Т дискретизации.
Если заданное значение тока находится в диапазоне , то это заданное значение в этом же виде направляется в блок 56 управления на этапе 96. В противном случае на этапе 98 в блок 56 направляют одно из двух предельных значений или 
В частности, на этапе 98 предел  направляют в блок 56 в качестве заданного значения тока , если заданное значение тока , определенное на этапе 92, меньше предела
направляют в блок 56 в качестве заданного значения тока , если заданное значение тока , определенное на этапе 92, меньше предела  . В противном случае, в качестве заданного значения средней силы тока Iu направляют предел
. В противном случае, в качестве заданного значения средней силы тока Iu направляют предел  .
.
После этапа 96 или 98 во время этапа 100 блок 56 управляет преобразователем 20, и, если необходимо, реостатом 46 во время интервала Т для создания тока Iu, средняя сила которого равна заданному значению тока . В частности, в случае, если заданное значение тока является положительным, то есть речь идет о потреблении тока, блок 56 может управлять либо только реостатом 46, либо только преобразователем 20, либо одновременно реостатом 46 и преобразователем 20 для создания тока Iu, средняя сила которого в течение интервала Т равна заданному значению тока .
Например, если управляют только реостатом 46, циклическое соотношение или угол размыкания выключателя 48 вычисляют при помощи следующего соотношения:

где  - среднее значение напряжения Uc между моментами ti и ti+1.
- среднее значение напряжения Uc между моментами ti и ti+1.
Среднее значение  можно, например, вычислить при помощи следующего соотношения:
можно, например, вычислить при помощи следующего соотношения:

Блок 56 может также изменять заданное значение момента Гс, который должен создавать двигатель 16, чтобы среднее значение силы тока было равно заданному значению тока .
Можно также одновременно управлять преобразователем 20 и реостатом 46 для получения тока Iu, средняя сила которого равна заданному значению тока .
В случае, когда заданное значение тока является отрицательным, то есть преобразователь 20 генерирует ток, блок 56 управления управляет только преобразователем 20.
Изменения заданного значения момента Гс, необходимые для получения тока Iu, средняя сила которого равна заданному значению тока , осуществляют либо по положительному знаку, либо по отрицательному знаку вокруг номинальной точки. Кроме того, измененное заданное значение момента Гс длится только в течение интервала Т, который является очень малым по сравнению с временем разгона электрического двигателя. Таким образом, водитель или пассажиры транспортного средства 2 не ощущают очень быстрых изменений момента.
После этапа 100 способ возвращается на этап 82. Таким образом, этапы 82-100 возобновляются в каждый момент дискретизации.
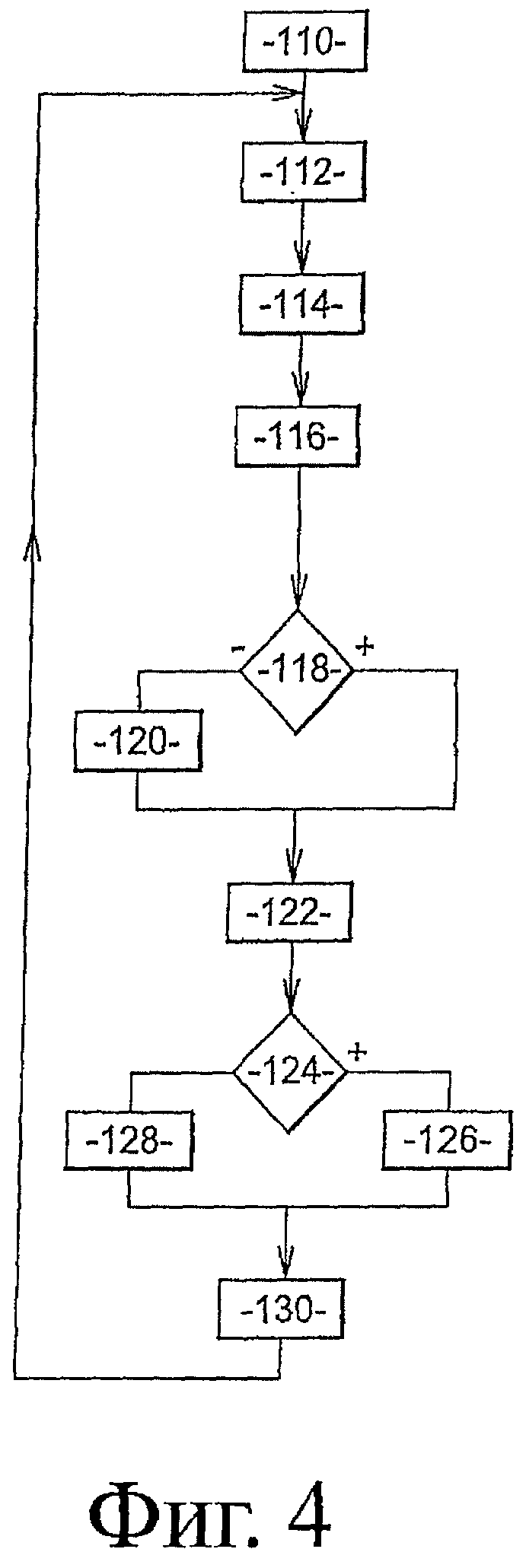
На фиг.4 показан способ мгновенного ответного регулирования силы линейного тока I1, и этот способ начинается с этапа 110, идентичного этапу 80. Затем на этапе 112 измеряют напряжения Uci, U1i и линейный ток I1i. Этот этап 112 идентичен, например, этапу 82.
Во время этапа 114 устанавливают заданное значение линейного тока I1c для силы линейного тока I1. Заданное значение I1c выбирают в диапазоне [I1min, I1max]. Например, заданное значение I1c выбирают равным I1min или I1max.
После этого на этапе 116 производят оценку величины Ucp напряжения Uc в момент ti+1, если сила линейного тока I1 в этот момент равна заданному значению линейного тока I1c. Например, эту оценку величины Ucp производят при помощи следующего соотношения:

Соотношение (13) получают путем решения системы уравнений состояний, определяемой соотношениями (7) и (8) в случае, когда I1,i+1 равно I1c, исключив Iu из системы уравнений (7) и (8).
На этапе 118 оценочную величину Ucp сравнивают с допустимым рабочим диапазоном [Ucmin, Ucmax].
Например, предел Ucmax равен допустимому максимальному напряжению между проводниками 26 и 28, и сверх этого предела включают реостат 46 для ограничения любого напряжения, превышающего этот предел, предусмотренный характеристиками преобразователя (20).
Предел Ucmin выбирают, например, по минимуму напряжения, допустимому для работы в аварийном режиме, ниже которого необходимо произвести подзарядку конденсатора от линии.
Во время этапа 120, если оценочная величина напряжения Ucp не входит в диапазон [Ucmin, Ucmax], тогда заданное значение линейного тока I1с изменяют, чтобы получить временное заданное значение линейного тока I1cm, которое позволяет сохранять напряжение Uc в диапазоне [Ucmin, Ucmax] в момент ti+1. Например, в данном случае временное заданное значение линейного тока I1cm выбирают таким образом, чтобы в момент ti+1 напряжение Uc было равно пределу Ucmin или пределу Ucmax. Например, для этого временное заданное значение I1cm получают при помощи следующего соотношения:

где Ucm является значением, выбранным в системе {Ucmin, Ucmax}.
В частности, значение Ucm выбирают равным Ucmin, если оценочная величина Ucp меньше предела Ucmin. В противном случае, то есть если оценочная величина Ucp превышает предел Ucmax, значение Ucm выбирают равным пределу Ucmax.
После этапа 120 или если оценочная величина Ucp входит в диапазон [Ucmin, Ucmax], осуществляют этап 122 вычисления заданного значения тока для средней силы тока Iu между моментами ti и ti+1. В частности, заданное значение тока вычисляют, чтобы точно в момент ti+1 сила линейного тока I1 была равна заданному значению линейного тока I1c или временному заданному значению линейного тока I1cm, если этап 120 выполнялся.
Например, значение вычисляют при помощи следующего соотношения:

Соотношение (15) получают путем решения системы уравнений дискретных состояний, определяемой соотношениями (7) и (8) в случае, когда I1,i+1 равно I1c и когда  равно , после исключения Uc,i+1.
равно , после исключения Uc,i+1.
После этого блок 56 выполняет этапы 124, 126, 128, 130, соответственно идентичные этапам 94, 96, 98 и 100 способа, показанного на фиг.3.
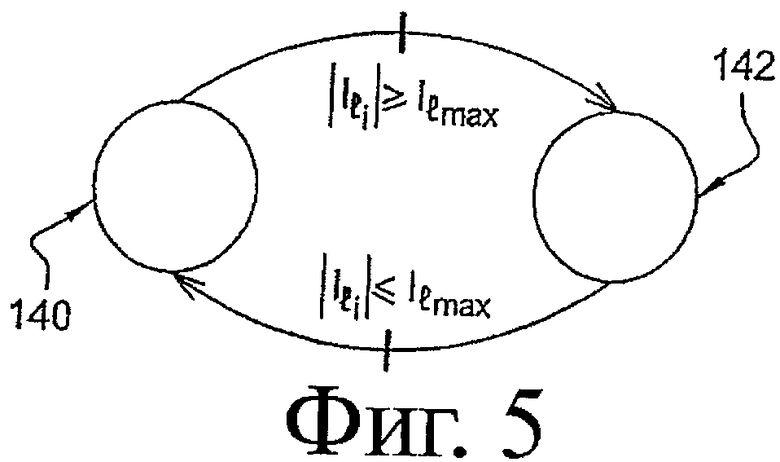
Учитывая, что блок 50 управления не может влиять на линейное напряжение U1, которое фиксируется напряжением контактной линии 6, он управляет только силой тока Iu. В этих условиях во время интервала Т можно регулировать либо только напряжение Uc, либо только линейный ток I1. Иначе говоря, способы, показанные на фиг.3 и 4, нельзя выполнять одновременно. Зато поочередно можно регулировать напряжение Uc, и линейный ток I1, чередуя выполнение этапов, показанных на фиг.3 и 4. Это позволяет, например, стабилизировать напряжение Uc, сохраняя линейный ток I1 в рабочем диапазоне [I1min, I1max]. Например, чтобы не допустить превышения предела I1max, можно осуществить способ, показанный на фиг.5.
Способ, показанный на фиг.5, содержит:
- фазу 140 регулирования напряжения Uc при помощи способа, показанного на фиг.3, и
- фазу 142 регулирования линейного тока I1 при помощи способа, показанного на фиг.4.
Блок 50 автоматически переходит от фазы 140 к фазе 142, когда измеренная сила тока I1i становится строго больше предела I1max.
И, наоборот, блок автоматически переходит от фазы 142 к фазе 140, когда сила тока I1i становится меньше заранее определенного предела, например, равного I1max.
Таким образом, пока измеренная сила тока I1 является строго меньше предела I1max, напряжение Uc поддерживается равным заданному значению напряжения Ucc в каждый момент ti. Таким образом, происходит ограничение колебаний заданного напряжения Ucc в результате возмущений линейного напряжения U1. Если сила линейного тока I1 превышает предел I1max, то от регулирования напряжения Uc отказываются и переходят к фазе 142. Например, во время фазы 142 заданное значение линейного тока I1c можно выбрать равным пределу I1max или строго меньшим предела I1max. Фазу 142 останавливают, как только измеренная сила линейного тока I1 становится меньше или равной пределу I1mах, и возвращаются к фазе 140.
Таким образом, чередуя во времени фазы 140 и 142, можно стабилизировать напряжение Uc, сохраняя при этом силу линейного тока I1 меньше предела I1max.
Аналогично фазы 140 и 142 выполняют поочередно для сохранения силы тока I1 больше предела I1min.
Работа способа показана на фиг.5 для частного случая перепада линейного напряжения U1, показанного на графике на фиг.6. Этот перепад представляет собой мгновенное падение линейного напряжения U1 с 3000 В до 2400 В и сохранение линейного напряжения U1 равным 2400 В в течение 0,1 с. После этого линейное напряжение U1 мгновенно повышается до 3450 В и остается равным этому значению в течение 0,1 с, после чего мгновенно падает опять до 3000 В. Эти колебания линейного напряжения U1 в данном случае происходят мгновенно. Таким образом, понятно, что показанное на фиг.7 возмущение является чисто теоретическим.
Кривые, показанные на фиг.7 и 8, были получены путем создания модели транспортного средства 2 со следующими числовыми параметрами:
- L=3 мГн
- R=25 мОм
- С=18 мФ
- U1=3000 В
- Ucmax=3500 В
- Iumax=-470 А
- Iumin=470 А
- I1max=2000 A
- Rh=2 Ом.
На фиг.7 показано изменение в зависимости от времени напряжения Uc, силы линейного тока I1 и силы тока Iu в случае, когда не применяют никакого способа регулирования напряжения Uc или линейного тока I1. Как можно заметить, это выражается в виде сильных колебаний напряжения Uc и силы линейного тока I1.
График на фиг.8 показывает изменение во времени напряжения Uc и силы тока I1 и Iu в ответ на возмущение, показанное на фиг.6, при всех равных параметрах, когда применяют способ, показанный на фиг.5. Кроме того, заданное значение напряжения Ucc в данном случае выбирают равным среднему значению линейного напряжения U1 за десять последних миллисекунд таким образом, чтобы получить резкие изменения этого заданного значения, которые неизбежно выражаются созданием ситуаций, в которых заданное значение тока достигает пределов диапазона  . Необходимо отметить, что этот выбор в данном случае сделан в порядке иллюстрации, чтобы показать, что происходит, когда заданное значение тока достигает пределов диапазона . На практике, заданное значение напряжения Ucc выбирают таким образом, чтобы сгладить перепады линейного напряжения U1, что было показано в связи с описанием этапа 82.
. Необходимо отметить, что этот выбор в данном случае сделан в порядке иллюстрации, чтобы показать, что происходит, когда заданное значение тока достигает пределов диапазона . На практике, заданное значение напряжения Ucc выбирают таким образом, чтобы сгладить перепады линейного напряжения U1, что было показано в связи с описанием этапа 82.
Как показано на графике на фиг.8, напряжение Uc сохраняется близким к заданному значению напряжения Ucc. Понятно, что при помощи этого способа колебания напряжения Uc очень хорошо контролируются в случае резких перепадов линейного напряжения U1.
Кроме того, как показано в виде плоских участков на кривой, отражающей изменение тока Iu в зависимости от времени, пределы  и
и  достигнуты, поэтому на этих плоских участках напряжение Uc не является строго равным заданному значению напряжения Ucc. И, наоборот, вне этих плоских участков напряжение Uc равно заданному значению напряжения Ucc.
достигнуты, поэтому на этих плоских участках напряжение Uc не является строго равным заданному значению напряжения Ucc. И, наоборот, вне этих плоских участков напряжение Uc равно заданному значению напряжения Ucc.
Таким образом, как показано на фиг.8, благодаря способу, показанному на фиг.5, колебания напряжения Uc контролируются при сохранении значений силы тока Iu и I1 в соответствующем рабочем диапазоне.
Возможны также многие другие варианты выполнения.
Например, проводник 26 шины DC можно соединить с пантографом 4 через выпрямитель, такой как диодный выпрямительный мост, и через трансформатор в случае контактной сети, питаемой переменным однофазным напряжением.
Вместо измерения можно произвести оценку либо силы линейного тока I1, либо напряжения Uc. Оценку можно также произвести одновременно для силы линейного тока I1 и напряжения Uc.
Все вышесказанное можно также отнести к случаю двигателей постоянного тока. В этом случае преобразователь 20 является, например, ограничителем/понижающим средством.
Наконец, необходимо отметить, что технические требования могут предусматривать использование приближения  заданного значения тока , а не точного значения, получаемого при помощи соотношения (10) или (15). Например, одним из этих технических требований является число знаков после запятой, с которыми может оперировать вычислительное устройство 54. Так, в данном описании считается, что с практической точки зрения заданное значение тока получают из системы уравнений состояний, определенной соотношениями (7) и (8), если следующий коэффициент взаимной корреляции α превышает 0,9:
заданного значения тока , а не точного значения, получаемого при помощи соотношения (10) или (15). Например, одним из этих технических требований является число знаков после запятой, с которыми может оперировать вычислительное устройство 54. Так, в данном описании считается, что с практической точки зрения заданное значение тока получают из системы уравнений состояний, определенной соотношениями (7) и (8), если следующий коэффициент взаимной корреляции α превышает 0,9:

где:
- N - целое число интервалов Т, превышающее 20, учитываемое для вычисления коэффициента взаимной корреляции α,
- (t) - точное заданное значение для средней силы тока Iu, полученное при помощи соотношения (10) или (15),
- (t) - приближенное заданное значение (t), направляемое вычислительным устройством 54 в блок 56,
-  определяют при помощи следующего соотношения:
определяют при помощи следующего соотношения:

-  определяют при помощи следующего соотношения:
определяют при помощи следующего соотношения:

Как было указано выше, коэффициент взаимной корреляции α представляет собой степень корреляции между приближением и точным заданным значением тока .
Предпочтительно, если необходимо делать приближения, их осуществляют таким образом, чтобы вышеуказанный коэффициент взаимной корреляции α даже превышал 0,97 или 0,99.
Приложение 1:
Получение уравнений дискретных состояний фильтра 30.
I - Электротехническая модель линейного фильтра.
I-1 - Система дифференциальных уравнений фильтра RLC.
I-2 - Система уравнений состояний.
Фильтр является системой второго порядка и поэтому имеет две степени свободы. Таким образом, вектором состояния является двухмерный вектор. Линейный ток и напряжение конденсатора можно выбирать как две координаты вектора состояния фильтра:
Эти две переменные величины измерены и, следовательно, известны. В противном случае одну из них следовало бы оценить или наблюдать.
Управляемыми переменными системы являются ток потребления и напряжение линии. Напряжение линии не может быть изменено непосредственно, оно входит в модель как измеренная, а не вычисленная управляемая переменная.

После определения, таким образом, системы уравнений ее можно записать в виде дифференциальных уравнений:

Отсюда выводят уравнение непрерывности:
Сравнив с системой уравнений в форме:
получают:
Кроме того, зная, что вектор измерения является вектором состояния:
где:
- I2 - единичная матрица размерности 2,
- А - свободная матрица изменения, и
- В - матрица управления.
II - Диагонализация матрицы изменения.
II-1 - Характеристическое уравнение матрицы изменения.
Детерминантом матрицы является: µ·1-А, равное 0:
следовательно:
II-2 - Собственные значения матрицы изменения.
Таковыми являются корни характеристического уравнения


Интересно также отметить, что эти собственные значения являются постоянными, если индуктивность не меняется с током, а в противном случае они зависят от тока. Эти корни проверяют характеристическое уравнение:

что можно также записать:
Характеристическое уравнение дает также сумму и произведение собственных значений в качестве отличительных соотношений:

Можно также заметить, что двойной корень µ1=µ2 получают при:

что является критическим сопротивлением амортизации.
Если R=0, µi=±i·ω, где  . Различают сопряженные комплексные полюсы. Если R≠0, полюсы являются комплексными сопряженными с отрицательной действительной частью, и если сопротивление является достаточно большим, сверх критической амортизации, полюсы являются отрицательными действительными.
. Различают сопряженные комплексные полюсы. Если R≠0, полюсы являются комплексными сопряженными с отрицательной действительной частью, и если сопротивление является достаточно большим, сверх критической амортизации, полюсы являются отрицательными действительными.
II-3 - Собственные векторы матрицы изменения.
Их вычисляют при помощи:
(µi·I-A)·Пi=0
то есть:
Произведение матриц записывают в этом случае в виде системы уравнений:
Из второго уравнения системы получают соотношение:
которое позволяет переписать первое уравнение:
Это уравнение по-прежнему проверяется для двух собственных значений, каким бы ни было  , поскольку первый множитель является идентично нулевым по характеристическому уравнению.
, поскольку первый множитель является идентично нулевым по характеристическому уравнению.
Теперь выберем  и
и  . Отсюда получаем:
. Отсюда получаем:
 и
и 
Матрица преобразования имеет собственные векторы:
то есть:
Обратное значение матрицы преобразования:
II-3 -Диагональная матрица.
Теперь можно записать:
A=P·D-1·P-1
где:
III - Проекция уравнений состояний.
III-1 - Уравнения дискретных состояний
Уравнения дискретных состояний получают путем интегрирования, начиная от первоначального момента ti до конца момента ti+1 периода дискретизации продолжительностью Т:

где:
F=eA·T G=A-1·(eA·T-I)·B
Если  представляет вектор состояния в первоначальный момент, то в этом случае
представляет вектор состояния в первоначальный момент, то в этом случае  представляет экстраполяцию вектора состояния. Теперь отметим:
представляет экстраполяцию вектора состояния. Теперь отметим:
 =
= и
и  =
=
Матрицу преобразования р и диагональную матрицу матрицы изменения используют для вычисления матрицы перехода и управления:

В этом случае систему уравнений дискретных состояний можно записать:

III-2 - Проекция векторов состояний.
Теперь достаточно произвести проекцию системы уравнений дискретных состояний в базис собственных векторов произведя слева умножение на обратное значение матрицы преобразования, и выделить «собственные» векторы состояний.

При этом отметим, что:

Упростим векторное соотношение:

Для упрощения конечного вида уравнения состояния умножим два члена уравнения на постоянную (µ2-µ1)·С:

Собственные векторы состояния определяют при помощи:
Таким образом, их координатами являются:
Матричное уравнение состояния можно записать с этим новым определением, отметив, кроме того, что:
«Собственный» вектор состояния  определяют как:
определяют как:
Систему уравнений состояний можно теперь записать в упрощенном виде:
или:
Наконец, сделав подстановку:
получаем «собственные» уравнения состояний в следующем виде:
Теперь можно уточнить предыдущую систему, используя определение промежуточных переменных:


| название | год | авторы | номер документа |
|---|---|---|---|
| ВТОРИЧНЫЙ ИСТОЧНИК ПИТАНИЯ | 2010 |
|
RU2431178C1 |
| Ключевой стабилизатор напряжения | 1990 |
|
SU1823002A1 |
| ВТОРИЧНЫЙ ИСТОЧНИК ПИТАНИЯ | 2010 |
|
RU2444776C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ | 2014 |
|
RU2572002C1 |
| СПОСОБ УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2001 |
|
RU2214618C2 |
| ТРЕХФАЗНЫЙ ТРАНСФОРМАТОР | 1993 |
|
RU2045790C1 |
| ВТОРИЧНЫЙ ИСТОЧНИК ПИТАНИЯ | 2007 |
|
RU2342691C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭДС И ВНУТРЕННЕГО СОПРОТИВЛЕНИЯ ЭЛЕКТРОХИМИЧЕСКОГО ГЕНЕРАТОРА С НЕЛИНЕЙНОЙ ВОЛЬТАМПЕРНОЙ ХАРАКТЕРИСТИКОЙ | 1991 |
|
RU2028699C1 |
| Способ измерения расстояния до места замыкания на землю | 2015 |
|
RU2638088C2 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОФАЗНЫМ ВЫПРЯМИТЕЛЕМ ПЕРЕМЕННОГО ТОКА С РАСПРЕДЕЛЕННЫМИ НАКОПИТЕЛЯМИ ЭНЕРГИИ ПРИ НИЗКИХ ВЫХОДНЫХ ЧАСТОТАХ | 2008 |
|
RU2487458C2 |
Изобретение относится к области электротехники и транспорта. Техническим результатом является обеспечение быстрой реакции на резкие изменения линейного напряжения или противодействующего момента. Способ мгновенного ответного регулирования напряжения Uc или тока I1 на выходе полосового фильтра RLC содержит операции, на которых: вычисляют (92) заданное значение тока  при средней силе
при средней силе  постоянного тока
постоянного тока  проходящего через первую выходную точку фильтра между моментами ti и ti+1, при этом указанное заданное значение устанавливают из уравнений дискретных состояний фильтра таким образом, чтобы напряжение Uc или линейный ток I1 были равны заранее определенному заданному значению напряжения Ucc или линейного тока I1c в момент ti+1; управляют (100) электрическим преобразователем для получения тока Iu, который проходит через фильтр и средняя сила
проходящего через первую выходную точку фильтра между моментами ti и ti+1, при этом указанное заданное значение устанавливают из уравнений дискретных состояний фильтра таким образом, чтобы напряжение Uc или линейный ток I1 были равны заранее определенному заданному значению напряжения Ucc или линейного тока I1c в момент ti+1; управляют (100) электрическим преобразователем для получения тока Iu, который проходит через фильтр и средняя сила  которого между моментами ti и ti+1 равна заданному значению тока . 7 н. и 12 з.п. ф-лы, 8 ил.
которого между моментами ti и ti+1 равна заданному значению тока . 7 н. и 12 з.п. ф-лы, 8 ил.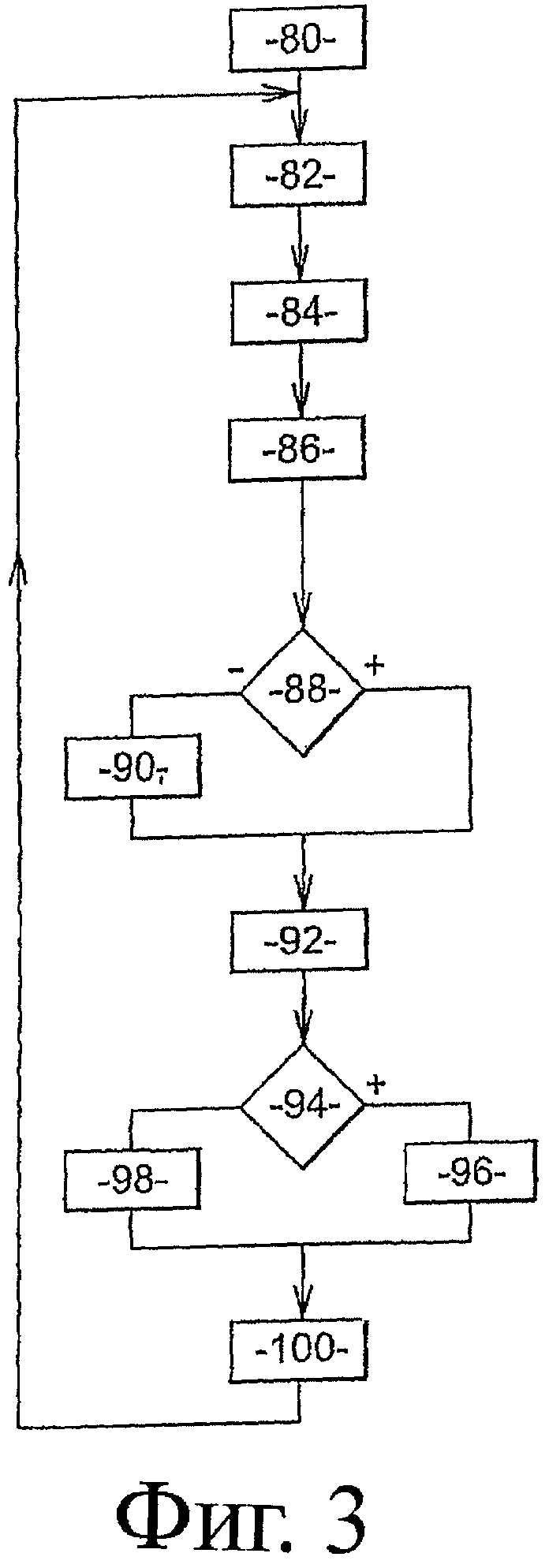
1. Способ регулирования напряжения Uc между первой и второй выходными точками (38, 40) полосового фильтра RLC (30) с собственным периодом Tf, причем фильтр RLC содержит две входные точки (34, 36), электрически соединенные соответственно с проводниками (26, 28) шины постоянного тока электрического транспортного средства, питаемого от контактной сети, при этом первая и вторая выходные точки (38, 40) электрически соединены с управляемым электрическим преобразователем (20), позволяющим управлять моментом, создаваемым тяговым электрическим двигателем (16) электрического транспортного средства, причем постоянная τ времени статора двигателя меньше собственного периода Tf, при этом способ включает измерение (82) или оценку силы I1i линейного тока Ii, проходящего через индуктивность (L) фильтра в момент ti, напряжения Uci между выходными точками (38, 40) фильтра в момент ti и линейного напряжения U1 между входными точками (34, 36) фильтра,
отличающийся тем, что является способом мгновенного ответного регулирования, содержащим операции, на которых:
- вычисляют (92) заданное значение тока при средней силе постоянного тока Iu, проходящего через первую выходную точку (38) фильтра между моментом ti и моментом ti+1, при этом указанное заданное значение устанавливают из уравнений дискретных состояний фильтра таким образом, чтобы напряжение Uc было равно заранее определенному заданному значению напряжения Ucc в момент ti+1, при этом указанные уравнения дискретных состояний связывают между собой значения I1i, I1i+1 линейного тока I1 соответственно в моменты ti и ti+1, значения напряжений Uci и Uc,i+1 между выходными точками (38, 40) фильтра соответственно в моменты ti и ti+1, среднее линейное напряжение между моментами ti и ti+1 и среднюю силу тока ,
- управляют (100) электрическим преобразователем для получения тока Iu, проходящего через выходную точку (38) фильтра и средняя сила которого между моментами ti и ti+1 равна заданному значению , при этом интервал Т времени между моментами ti и ti+1 меньше 5τ.
2. Способ по п.1, в котором заданное значение напряжения Ucc выбирают систематически меньшим или равным предельному значению Ucmax, при этом предельное значение Ucmax соответствует допустимому максимальному напряжению на входе электрического преобразователя (20) или между выходными точками (38, 40) фильтра.
3. Способ по п.1, в котором:
- производят (86) оценку величины I1p линейного тока I1, которая будет достигнута, если напряжение Uc равно заданному значению напряжения Ucc в момент ti+1,
- сравнивают (88) оценочную величину I1p, по меньшей мере, с одним заранее определенным предельным значением I1m,
- только, если заранее определенное предельное значение I1m пройдено, изменяют (90) заданное значение напряжения Ucc таким образом, чтобы получить временное заданное значение напряжения Uccm, которое соответствует оценочной величине I1p, не переходящей заранее определенное предельное значение I1m, и используют временное заданное значение напряжения Uccm вместо заданного значения напряжения Ucc во время вычисления заданного значения только для текущего интервала Т; и
- если заранее определенное предельное значение I1m не пройдено, используют заданное значение напряжения Ucc для вычисления заданного значения для текущего интервала Т.
4. Способ по п.1, в котором заданное значение является решением следующей системы уравнений


где
- R и L - соответственно значения сопротивления и индуктивности фильтра RLC, последовательно соединенных между первыми входными и выходными точками,
- С - емкость конденсатора, соединенного между первой и второй выходными точками,
- µ1 и µ2 - собственные значения матрицы изменения, определенные при помощи следующего уравнения
- α1 и α2 - значения, определенные при помощи следующих уравнений
5. Способ по п.1, в котором заданное значение напряжения Ucc определяют на основе линейного напряжения U1 таким образом, чтобы его спектр мощности не содержал никаких гармоник сверх частоты 0,9/Tf.
6. Способ по п.1, который содержит управление реостатом, чтобы в комбинации с управлением преобразователем получать ток Iu, проходящий через первый выходной контакт фильтра и средняя сила которого между моментами ti и ti+1 равна заданному значению тока .
7. Способ по п.1, в котором интервал Т меньше или равен τ/5.
8. Способ регулирования линейного тока I1, проходящего через индуктивность L полосового фильтра RLC с собственным периодом Tf, при этом фильтр содержит:
- две входные точки (34, 36), электрически соединенные соответственно с проводниками (26, 28) шины постоянного тока электрического транспортного средства, питаемого от контактной сети, и
- первую и вторую выходные точки (38, 40), при этом первая выходная точка электрически соединена с управляемым электрическим преобразователем (20), предназначенным для изменения момента тягового электрического двигателя (16) электрического транспортного средства, при этом постоянная τ времени статора электрического двигателя (16) меньше собственного периода Tf,
при этом способ содержит операции, на которых:
- измеряют (112) или оценивают силу I1i - линейного тока Ii в момент ti, напряжение Uci между выходными точками (38, 40) фильтра в момент ti и линейное напряжение U1 между входными точками (34, 36) фильтра,
отличающийся тем, что является способом мгновенного ответного регулирования, в котором:
- вычисляют (122) заданное значение для средней силы постоянного тока Iu, проходящего через первую выходную точку (38) фильтра между моментом ti и моментом ti+1, при этом указанное заданное значение устанавливают из уравнений дискретных состояний фильтра таким образом, чтобы сила линейного тока I1 была равна заранее определенному заданному значению линейного тока I1c в момент ti+1, при этом указанные уравнения дискретных состояний связывают между собой значения силы I1i, I1i+1 линейного тока I1 соответственно в моменты ti и ti+1, напряжение Uci и Uc,i+1 между выходными точками (38, 40) фильтра соответственно в моменты ti и ti+1, среднее линейное напряжение между моментами ti и ti+1 и среднюю силу тока ,
- управляют (130) электрическим преобразователем (20) для получения тока Iu, проходящего через выходную точку (38) фильтра и средняя сила которого между моментами ti и ti+1 равна заданному значению , при этом интервал Т времени между моментами ti и ti+1 меньше 5τ.
9. Способ по п.8, в котором заданное значение линейного тока I1c выбирают систематически меньшим или равным предельному значению I1max, при этом предельное значение I1max соответствует значению силы линейного тока I1, при котором срабатывает прерыватель подстанции питания контактной сети или прерыватель транспортного средства.
10. Способ по любому из пп.8 или 9, в котором заданное значение линейного тока I1c выбирают систематически превышающим или равным предельному значению I1min, при этом предельное значение I1min соответствует значению силы линейного тока, ниже которого индуктивность L фильтра ненасыщена.
11. Способ по п.8, в котором:
- производят (116) оценку величины Ucp напряжения Uc, которая будет достигнута между выходными точками (38, 40) фильтра в момент ti+1, если сила линейного тока I1 равна заданному значению линейного тока I1c в момент ti+1,
- сравнивают (118) оценочную величину напряжения Ucp, по меньшей мере, с одним заранее определенным предельным значением напряжения Ucm,
- только, если заранее определенное предельное значение напряжения Ucm пройдено, изменяют (120) заданное значение линейного тока I1c таким образом, чтобы получить временное заданное значение линейного тока I1cm, которое соответствует оценочной величине напряжения Ucp, которая не проходит заранее определенное предельное значение напряжения Ucm, и используют временное заданное значение линейного тока I1cm вместо заданного значения линейного тока I1c при управлении преобразователем только во время текущего интервала Т; и
- если заранее определенное предельное значение напряжения Ucm не пройдено, используют заданное значение линейного тока I1с во время вычисления заданного значения тока для текущего интервала Т.
12. Способ по п.8, в котором заданное значение тока является решением следующей системы уравнений


где
- R и L - соответственно значения сопротивления и индуктивности фильтра RLC, последовательно соединенных между первыми входными и выходными точками,
- С - емкость конденсатора, соединенного между первой и второй выходными точками,
- µ1 и µ2 - собственные значения матрицы изменения, определенные при помощи следующего соотношения
- α1 и α2 - значения, определенные при помощи следующих соотношений
13. Способ по п.8, который содержит управление реостатом, чтобы в комбинации с управлением преобразователем получать ток Iu, проходящий через первый выходной контакт фильтра и средняя сила которого между моментами ti и ti+1 равна заданному значению тока .
14. Способ по п.8, в котором интервал Т меньше или равен τ/5.
15. Способ регулирования электрических параметров фильтра RLC, содержащий
- первую фазу (14) регулирования только напряжения Uc между первой и второй выходными точками фильтра RLC (30) с собственным периодом Tf, причем фильтр RLC содержит две входные точки (34, 36), электрически соединенные соответственно с проводниками (26, 28) шины постоянного тока электрического транспортного средства, питаемого от контактной сети, при этом первая и вторая выходные точки (38, 40) электрически соединены с управляемым электрическим преобразователем (20), позволяющим управлять моментом, создаваемым тяговым электрическим двигателем (16) электрического транспортного средства, причем постоянная τ времени статора двигателя меньше собственного периода Tf, при этом регулирование напряжения Uc включает измерение (82) или оценку силы I1i линейного тока I1, проходящего через индуктивность (L) фильтра в момент ti, напряжения Uci между выходными точками (38, 40) фильтра в момент ti и линейного напряжения U1 между входными точками (34, 36) фильтра,
- вычисление (92) заданного значения тока при средней силе постоянного тока Iu, проходящего через первую выходную точку (38) фильтра между моментом ti и моментом ti+1, при этом указанное заданное значение устанавливают из уравнений дискретных состояний фильтра таким образом, чтобы напряжение Uc было равно заранее определенному заданному значению напряжения Ucc в момент ti+1, при этом указанные уравнения дискретных состояний связывают между собой значения I1i, I1i+1 линейного тока I1 соответственно в моменты ti и ti+1, значения напряжений Uci и Uc,i+1 между выходными точками (38, 40) фильтра соответственно в моменты ti и ti+1, среднее линейное напряжение между моментами ti и ti+1 и среднюю силу тока 
- управление (100) электрическим преобразователем для получения тока Iu, проходящего через выходную точку (38) фильтра и средняя сила которого между моментами ti и ti+1 равна заданному значению , при этом интервал Т времени между моментами ti и ti+1 меньше 5τ,
- вторую фазу (142) регулирования только силы линейного тока I1, проходящего через индуктивность L полосового фильтра RLC с собственным периодом Tf, при этом регулирование силы линейного тока включает в себя
- измерение (112) или оценку силу I1i линейного тока I1 в момент ti, напряжение Uci между выходными точками (38, 40) фильтра в момент ti и линейное напряжение U1 между входными точками (34, 36) фильтра, причем регулирование силы линейного тока является способом мгновенного ответного регулирования, в котором:
- вычисляют (122) заданное значение для средней силы постоянного тока Iu, проходящего через первую выходную точку (38) фильтра между моментом ti и моментом ti+1, при этом указанное заданное значение устанавливают из уравнений дискретных состояний фильтра таким образом, чтобы сила линейного тока I1 была равна заранее определенному заданному значению линейного тока I1c в момент ti+1, при этом указанные уравнения дискретных состояний связывают между собой значения силы I1i,I1i+1 линейного тока I1 соответственно в моменты ti и ti+1, напряжение Uci; и Uc,i+1 между выходными точками (38, 40) фильтра соответственно в моменты ti и ti+1, среднее линейное напряжение между моментами ti и ti+1 и среднюю силу тока , и
- управляют (130) электрическим преобразователем (20) для получения тока Iu, проходящего через выходную точку (38) фильтра и средняя сила которого между моментами ti и ti+1 равна заданному значению , при этом интервал Т времени между моментами ti и ti+1 меньше τ, при этом
- переход от первой фазы (140) ко второй фазе (142) выполняют, как только сила линейного тока I1 проходит предельное значение I1m, и переход от второй фазы к первой фазе - как только сила линейного тока I1 проходит это же или другое предельное значение в обратном направлении.
16. Носитель (52) для записи информации, характеризующийся тем, что содержит команды для выполнения способа по п.1, при этом указанные команды исполняются электронным вычислительным устройством.
17. Носитель (52) для записи информации, характеризующийся тем, что содержит команды для выполнения способа по п.8, при этом указанные команды исполняются электронным вычислительным устройством.
18. Электрическое транспортное средство, содержащее:
- шину постоянного тока, образованную двумя проводниками (26, 28),
- по меньшей мере, один тяговый двигатель (16) электрического транспортного средства с постоянной τ времени статора,
- управляемый электрический преобразователь (20), выполненный с возможностью изменения момента тягового двигателя,
- полосовой фильтр RLC (30), содержащий две входные точки (34, 36), электрически соединенные соответственно с двумя проводниками (26, 28) шины постоянного тока, и первую и вторую выходные точки (38, 40), электрически соединенные с электрическим преобразователем (20),
- датчики (60, 62, 64) или эстиматоры, выполненные с возможностью измерения или оценки силы I1i линейного тока I1, проходящего через индуктивность (L) фильтра в момент ti, напряжения Uci между выходными точками (38, 40) фильтра в момент ti линейного напряжения U1 между входными точками (34, 36) фильтра, отличающееся тем, что содержит:
- устройство (54) для вычисления заданного значения тока для средней силы постоянного тока Iu, проходящего через первую выходную точку (38) между моментом ti и моментом ti+1, причем это заданное значение тока выводят из уравнений дискретных состояний фильтра таким образом, чтобы напряжение Uc было равно заранее определенному заданному значению напряжения Ucc в момент ti+1, при этом указанные уравнения дискретных состояний связывают между собой значения силы I1i, I1,i+1 линейного тока I1 соответственно в моменты ti и ti+1, значения напряжения Uci и Uc,i+1 между выходными точками (38, 40) фильтра соответственно в моменты ti и ti+1, среднее линейное напряжение между моментами ti и ti+1 и среднюю силу тока ,
- блок (56) управления электрическим преобразователем для получения тока Iu, проходящего через выходную точку (38) фильтра и средняя сила которого между моментами ti и ti+1 равна заданному значению , при этом интервал Т времени между моментами ti и ti+1 меньше 5τ.
19. Электрическое транспортное средство, содержащее:
- шину постоянного тока, образованную двумя проводниками (26, 28),
- по меньшей мере, один тяговый двигатель (16) электрического транспортного средства с постоянной τ времени статора,
- управляемый электрический преобразователь (20), выполненный с возможностью изменения момента тягового двигателя,
- полосовой фильтр RLC (30), содержащий две входные точки (34, 36), электрически соединенные соответственно с двумя проводниками (26, 28) шины постоянного тока, и первую и вторую выходные точки (38, 40), электрически соединенные с электрическим преобразователем (20),
- датчики (60, 62, 64) или эстиматоры, выполненные с возможностью измерения или оценки силы I1i линейного тока I1, проходящего через индуктивность (L) фильтра в момент ti, напряжения Uci между выходными точками (38, 40) фильтра в момент ti, напряжения U1 между входными точками (34, 36) фильтра,
отличающееся тем, что содержит:
- устройство (54) для вычисления заданного значения тока для средней силы постоянного тока Iu, проходящего через первую выходную точку (38) фильтра между моментом ti и моментом ti+1, причем это заданное значение тока выводят из уравнений дискретных состояний фильтра таким образом, чтобы сила линейного тока I1 была равна заранее определенному заданному значению линейного тока I1c в момент ti+1, при этом указанные уравнения дискретных состояний связывают между собой значения силы I1i, I1,i+1 линейного тока I1 соответственно в моменты ti и ti+1 значения напряжения Uci и Uc,i+1 между выходными точками (38, 40) фильтра соответственно в моменты ti и ti+1, среднее линейное напряжение между моментами ti и ti+1 и среднюю силу тока , и
- блок (56) управления электрическим преобразователем (20) для получения тока Iu, проходящего через выходную точку (38) фильтра и средняя сила которого между моментами ti и ti+1 равна заданному значению тока , при этом интервал Т времени между моментами ti и ti+1 меньше 5τ.
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ | 1998 |
|
RU2209502C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРИВОДНОЙ СИСТЕМОЙ БОЛЬШОЙ МОЩНОСТИ | 2000 |
|
RU2183570C1 |
| АСИНХРОННЫЙ ТЯГОВЫЙ ПРИВОД ЭЛЕКТРОПОЕЗДА | 2004 |
|
RU2299512C2 |
| US 4543518 A1, 24.09.1985 | |||
| DE 4316365 A1, 01.12.1994 | |||
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "РЫБНЫЕ БИТОЧКИ С КАПУСТОЙ В СОУСЕ СМЕТАННОМ С ЛУКОМ" | 2015 |
|
RU2576163C1 |
| Регистратор прозрачности атмосферы | 1988 |
|
SU1610450A2 |

