Изобретение относится к устройству управления устройством для преобразования электрической мощности, состоящемув из выпрямителя, преобразующего переменный ток в постоянный, и инвертора, преобразующего постоянный ток в переменный, в частности изобретение относится к техническим решениям, направленным на подавление биений, обусловленных пульсациями, возникающими при выпрямлении тока выпрямителем, при использовании инвертора для привода регулируемого двигателя переменного тока.
Предпосылки создания изобретения
В устройстве для преобразования электрической мощности типа выпрямитель-инвертор с промежуточным контуром постоянного тока в том случае, когда источником мощности переменного тока, подаваемого на выпрямитель, является однофазный ток (как, например, в электрическом подвижном железнодорожном составе с подводом мощности от контактных проводов переменного тока) в постоянном напряжении, полученном после выпрямления переменного тока, присутствуют пульсации, частота которых в два раза больше частоты источника мощности переменного тока. Такие пульсации можно уменьшить за счет увеличения емкости сглаживающего конденсатора, имеющегося в контуре постоянного тока, однако полностью ликвидировать их достаточно сложно и прежде всего с учетом того, что увеличение емкости сглаживающего конденсатора сопровождается увеличением его размеров и, как следствие этого, увеличением размеров и веса всего преобразователя.
Когда полученное в результате выпрямления переменного тока напряжение постоянного тока, содержащее упомянутые пульсации, преобразуется инвертором в напряжение переменного тока переменной частоты и полученное в результате такого преобразования переменное напряжение подается на соответствующую нагрузку, в частности на двигатель переменного тока, в выходном напряжении инвертора и токе двигателя будут содержаться переменные составляющие с частотой, равной разности и сумме частоты пульсации и рабочей частоты инвертора и не совпадающей с рабочей частотой переменной составляющей тока и напряжения инвертора. Когда частота возникающих пульсаций становится близкой к рабочей частоте, обусловленная их разницей составляющая напряжения становится низкочастотной, и при малом импедансе двигателя на малых частотах в нем возникают пульсации тока, которые приводят к появлению биений, сопровождающихся колебаниями момента приводного двигателя.
В JA-A 64-77492 описан механизм возникновения такого рода биений и способ их подавления. В описанном в этом патенте способе подавления биений определяются пульсации входного напряжения постоянного тока инвертора и их частота и осуществляется коррекция коэффициента усиления и разности фаз в соответствии с рабочей частотой инвертора и одновременное регулирование частоты инвертора в зависимости от частоты пульсаций, сопровождающееся подавлением возникающих биений.
Однако в описанном в этом документе способе подавления биений для получения необходимого эффекта подавления биений приходится корректировать коэффициент усиления и разность фаз в зависимости от рабочей частоты инвертора. Кроме того, для оптимизации процесса подавления биений таким способом необходимо учитывать выходные обороты двигателя, а не рабочую частоту инвертора. Если, однако, для регулирования коэффициента усиления и разности фаз учитывать и рабочую частоту инвертора, и выходные обороты двигателя, то при этом возникают практически не решаемые проблемы, связанные со сложностью процесса регулирования.
Кроме того, как описано, например, в JP-А 5-83976, для управления асинхронным двигателем привода электрического подвижного состава было предложено использовать векторное управление инвертором, однако в этом документе нет никакой информации о подавлении биений в системе с векторным управлением инвертора. Более того, авторам вообще не известны какие-либо опубликованные материалы по проблеме подавления биений в подобных системах.
Исходя из вышеизложенного, в основу настоящего изобретения была положена задача разработать такие устройство для преобразования электрической мощности и способ управления им, которые при меняющейся частоте инвертора и оборотах приводного двигателя обеспечивали бы без всякого использования сложной системы коррекции коэффициента усиления и разности фаз подавление биений, вызванных пульсациями напряжения постоянного тока на входе инвертора.
Краткое изложение сущности изобретения
В настоящем изобретении предлагается устройство для преобразования электрической мощности, которое имеет выпрямитель, преобразующий в напряжение постоянного тока напряжения источника переменного тока, сглаживающий конденсатор, соединенный с выходом постоянного тока выпрямителя, инвертор для преобразования выходного постоянного тока сглаживающего конденсатора в переменный ток, от которого работает двигатель переменного тока, и устройство для регулирования напряжения, частоты или фазы выходного переменного тока инвертора, содержащее блок регулирования по крайней мере напряжения, частоты и фазы выходного переменного тока инвертора в зависимости от частоты пульсаций, присутствующих в выходном переменном токе инвертора и связанных с пульсациями, возникающими в процессе выпрямления переменного тока в выпрямителе.
Кроме того, в настоящем изобретении предлагается способ регулирования инвертора, преобразующего напряжение постоянного тока, полученного после выпрямления напряжения переменного тока в выпрямителе, в напряжение переменного тока, которое подается на двигатель переменного тока, заключающийся в регулировании напряжения, частоты или фазы выходного переменного тока инвертора с целью регулирования переменной скорости вращения двигателя переменного тока путем регулирования по крайней мере напряжения, частоты и фазы выходного переменного тока инвертора в зависимости от частоты присутствующих в нем пульсаций, связанных с пульсациями, возникающими в процессе выпрямления переменного тока в выпрямителе, с целью подавления вызванных ими биений.
Краткое описание чертежей
На приложенных к описанию чертежах показано:
на фиг. 1 - принципиальная схема блока регулирования устройства для преобразования электрической мощности, выполненного по первому варианту,
на фиг. 2 - принципиальная схема устройства для преобразования электрической мощности при использовании его в приводе железнодорожного электрического подвижного состава,
на фиг. 3 - вариант выполнения одного из узлов блока регулирования, показанного на фиг.1,
на фиг. 4 - другой вариант выполнения одного из узлов блока регулирования, показанного на фиг.1,
на фиг.5 - еще один вариант выполнения одного из узлов блока регулирования, показанного на фиг.1,
на фиг.6 - еще один вариант выполнения одного из узлов блока регулирования, показанного на фиг.1,
на фиг. 7А-7Д - рабочие характеристики устройства для преобразования электрической мощности, полученные при известном способе регулирования,
на фиг. 8А-8Д - рабочие характеристики устройства для преобразования электрической мощности, полученные при регулировании предлагаемым в настоящем изобретении способом,
на фиг. 9 - принципиальная схема блока регулирования устройства для преобразования электрической мощности, выполненного по второму варианту,
на фиг. 10 - принципиальная схема блока регулирования устройства для преобразования электрической мощности, выполненного по третьему варианту,
на фиг. 11 - принципиальная схема блока регулирования устройства для преобразования электрической мощности, выполненного по четвертому варианту,
на фиг. 12 - принципиальная схема блока регулирования устройства для преобразования электрической мощности, выполненного по пятому варианту,
на фиг. 13 - принципиальная схема блока регулирования устройства для преобразования электрической мощности, выполненного по шестому варианту, и
на фиг. 14 - принципиальная схема блока регулирования устройства для преобразования электрической мощности, выполненного по седьмому варианту.
Предпочтительные варианты выполнения изобретения
В приведенном ниже описании рассмотрены различные варианты выполнения настоящего изобретения. На фиг.1 показана принципиальная схема блока регулирования инвертора устройства для преобразования электрической мощности, схема которого показана на фиг.2. На фиг.2 показана принципиальная схема устройства для преобразования электрической мощности, используемого для привода железнодорожного электрического подвижного состава. Сначала рассматривается схема, показанная на фиг.2. Показанное на этой схеме устройство имеет выпрямитель 13, который выпрямляет и преобразует выходное напряжение однофазного источника 11 переменного тока, снимаемого с контактной линии 9 пантографом 10, дроссель 12, сглаживающий конденсатор 14, который связан с контуром постоянного тока выпрямителя 13 и сглаживает его выходное напряжение постоянного тока, и инвертор, на вход которого подается напряжение ed постоянного тока, сглаженное сглаживающим конденсатором 14, и который преобразует постоянный ток в переменный с переменной частотой и переменным напряжением, от которого работает трехфазный двигатель 16 переменного тока (в данном случае, как показано на схеме, асинхронный двигатель). Кроме того, на схеме показано несколько входящих в блок регулирования датчиков, назначение которых описано ниже, и, в частности, датчик 141 напряжения, который измеряет напряжение ed сглаживающего конденсатора 14, датчики тока 151-153, которые измеряют выходные токи трех фаз переменного тока (фазам U-W соответствуют токи iu-iw) в проводах, соединяющих инвертор 15 с двигателем 16 переменного тока, датчик 161 напряжения, который измеряет выходные напряжения трех фаз (Vu-Vw) инвертора 15, и датчик скорости 154, который измеряет частоту fr. вращения двигателя 16 переменного тока.
В основе работы блока регулирования, показанного на фиг.1, лежит принцип векторного регулирования, описанный в JP-A 5-83976. Позицией 31 на схеме обозначен генератор сигналов управления, который генерирует сигнал Id* управления током возбуждения и сигнал Iq* управления тяговым током, определяющим величину крутящего момента двигателя, которые представляют собой составляющие вектора тока в двухосной ортогональной вращающейся системе координат приводного двигателя переменного тока. Позицией 21 на схеме обозначено устройство вычисления вектора тока, которое выполняет преобразование координат мгновенных значений выпрямленных выходных токов iu, iv и iw соответствующих фаз в системе координат, вращающейся с основной частотой finv0 инвертора в соответствии с формулой (2), рассмотренной более подробно ниже, определяет компоненты тока в ортогональной двухосной системе координат двигателя и вычисляет ток Id возбуждения и тяговый ток Iq, являющиеся составляющими вектора тока. Позицией 32 на схеме обозначено устройство регулирования тока (регулятор тока), которое вычисляет сигнал V управления выходным напряжением (действующее значение) инвертора и сигнал fs управления частотой скольжения, при которых вышеуказанные составляющие Id и Iq вектора тока совпадают с соответствующим сигналами Id* и Iq*.
Позицией 34 на схеме обозначен генератор частоты, компенсирующей пульсации тока в инверторе, который генерирует частоту f компенсации пульсаций по вычисленной величине Iq тягового тока. Позициями 35 и 36 на схеме обозначены сумматор 35, который складывает частоту fr. вращения двигателя с частотой fs скольжения и выдает значение finv0 основной частоты инвертора, и сумматор 36, который складывает основную частоту finv0 инвертора с частотой fс компенсации пульсаций, и выдает сигнал finv управления, определяющий рабочую частоту инвертора. Позицией 90 на схеме обозначено устройство вычисления фаз, которое вычисляет сигнал управления фазой θ0(=2πfinvt, где t означает время) выходного напряжения инвертора по сигналу finv рабочей частоты инвертора. Позицией 33 на схеме обозначен генератор ШИМ-импульсов (широтно-импульсной модуляции), используемых в процессе хорошо известного ШИМ-регулирования, в котором по управляющему сигналу выходного напряжения инвертора V и сигналу θ0 управления фазой получают необходимые для регулирования ШИМ-сигналы. В данном случае полученные в генераторе импульсов ШИМ-сигналы управляют работой инвертора 15.
Следует отметить, что отличительные особенности настоящего изобретения связаны с совместным использованием в блоке регулирования генератора 34 частоты компенсации пульсаций и сумматора 36, которые дополнительно включены в схему известного устройства векторного регулирования.
До подробного рассмотрения различных вариантов выполнения настоящего изобретения применительно к описанной выше схеме регулирования ниже поясняются основные принципы, лежащие в основе изобретения.
При векторном регулировании ток возбуждения и тяговый ток регулируются независимо. Сначала рассмотрен хорошо известный способ разложения соответствующих мгновенных значений токов iu, iv и iw трех фаз двигателя переменного тока на упомянутые две компоненты вектора тока.
Для определения мгновенных значений токов трех фаз двигателя переменного тока при отсутствии биений (fc=0 и finv=finv0) можно воспользоваться приведенной ниже формулой (1), в которой IM означает эффективное значение тока двигателя, t означает время, а φ означает угол коэффициента мощности тока двигателя:
Преобразование мгновенных значений токов трех фаз в компоненты (Id, 30 Iq) тока в системе двух ортогональных осей d-q, вращающейся с угловой скоростью 2πfinv0, выполняется по формуле (2). В этой формуле угол δ означает разность фаз между вектором выходного напряжения инвертора и тяговой составляющей тока.
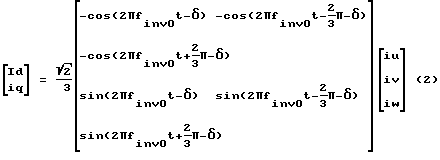
Полученные в результате вычислений по формуле (2) величины Id и Iq представляют собой модули векторов тока возбуждения и тягового тока при частоте finv0 и определяются по следующим уравнениям:
Id=-IM•sin(φ-δ) и Iq=IM•cos(φ-δ).
Предполагается далее, что на выходное напряжение, подаваемое на вход инвертора, накладываются пульсации с частотой f0. В этом случае в выходном напряжении инвертора помимо основной частоты finv0 появляются частоты, равные сумме (finv0+f0) основной частоты finv0 инвертора и частоты f0 пульсаций напряжения постоянного тока и разности (finv0-f0) этих частот. Поскольку с уменьшением частоты импеданс двигателя снижается, основным фактором, вызывающим биения, будет наличие в спектре частот выходного напряжения инвертора частоты (finv0-f0). Поэтому при определении тока двигателя, содержащего переменную составляющую с частотой пульсаций, необходимо учитывать значения частот finv0 и (finv0-f0). В приведенных ниже уравнениях IM и IB являются эффективными значениями тока для частот finv0 и (finv0-f0) соответственно:
В этих уравнениях φ0 означает фазу обусловленной пульсациями напряжения постоянного тока составляющей тока двигателя, а φ0 означает угол коэффициента мощности двигателя на частоте (finv0-f0)
Для преобразования мгновенных значений токов трех фаз, выраженных формулами (3), в компоненты (Id, Iq) тока относительно двух ортогональных осей d-q системы координат, вращающейся с угловой скоростью 2πfinv0, можно воспользоваться приведенными ниже формулами (4):
Из формул (4) следует, что в обеих составляющих тока Id и Iq помимо членов IМ•sin(φ-δ) и IM•cos(φ-δ), представляющих собой соответственно значения модулей векторов тока возбуждения и тягового тока для частоты finv0, содержатся компоненты тока вдоль осей d и q на частоте f0.
Иными словами, путем происходящего в процессе преобразования во вращающуюся систему координат расчетного выпрямления тока двигателя можно, определив значения величин Id и Iq постоянного тока, определить по величине сигнала постоянного тока амплитуду основной частоты и легко выделить наложенную на сигнал постоянного тока переменную составляющую, обусловленную пульсациями напряжения на входе инвертора.
В соответствии с настоящим изобретением по крайней мере из одной величин Id или Iq постоянного тока, полученных в результате расчета после преобразования измеренных значений тока трех фаз двигателя во вращающуюся систему координат, выделяется составляющая тока с частотой f0, после чего рабочая (выходная) частота инвертора регулируется в направлении снижения выделенной составляющей тока с частотой f0, в результате чего происходит подавление имеющих частоту (finv0-f0) биений тока. двигателя.
С учетом изложенных выше принципов, лежащих в основе настоящего изобретения, ниже рассмотрены отличительные особенности одного из вариантов его выполнения, реализованные в схеме, показанной на фиг.1. Показанный на этой схеме генератор 34 частоты, компенсирующей влияние пульсаций на работу инвертора, по величине тягового тока Iq, полученной устройством 21 вычисления вектора тока, определяет частоту f0 пульсаций, и на основании величины f0 вычисляет частоту fс компенсации пульсаций. После этого частота fс компенсации пульсаций добавляется к основной частоте finv0 инвертора с получением значения его выходной (рабочей) частоты finv, на основании которой происходит дальнейшее регулирование инвертора. В результате образуется система с обратной связью для переменной составляющей тока с частотой пульсаций, присутствующих в токе двигателя, обеспечивающая подавление биений независимо от режима работы привода. Следует также отметить, что в этом варианте система с обратной связью основана на использовании величины тока Iq, однако, поскольку частотную составляющую f0 пульсаций можно определить и по величине тока Id, то и систему с обратной связью можно сформировать и на основе тока Id.
Кроме того, поскольку биения возникают при прохождении рабочей частоты инвертора через частоту пульсаций, сложение частоты fc компенсации пульсаций с основной частотой инвертора finv0 можно также выполнить только в диапазоне, близком к частоте пульсаций.
На фиг. 3 показана подробная схема изображенного на фиг.1 генератора 34 частоты компенсации пульсаций на входе инвертора. В показанном на фиг.3 генераторе после определения детектором 61 пульсаций частоты f0 пульсаций, присутствующих в тяговом токе Iq, выходной сигнал детектора 61 вычитается устройством 41 вычитания из номинального значения сигнала с частотой пульсаций, равной 0, и полученный на выходе устройства 41 вычитания сигнал подается в устройство 62 компенсации. Устройство 62 компенсации генерирует сигнал с частотой fc компенсации пульсаций, при котором сигнал на ег входе становится равным нулю, снижая тем самым до нуля амплитуду сигнала с частотой пульсаций. В качестве детектора 61 для определения частоты пульсаций можно использовать, например, полосовой фильтр, который пропускает сигналы с частотами, близкими к частоте f0. Кроме того, в качестве устройства 62 компенсации можно использовать, например, пропорциональный элемент или пропорционально-интегральный элемент.
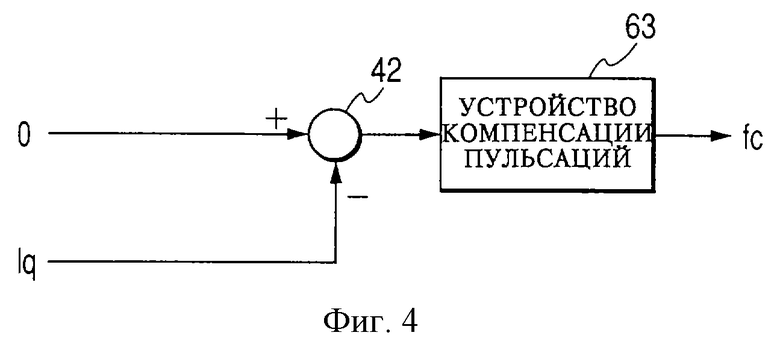
На фиг. 4 показан другой вариант выполнения изображенного на фиг.1 генератора 34 частоты компенсации пульсаций в инверторе. В генераторе, показанном на фиг.4, тяговый ток Iq вычитается устройством 42 вычитания из номинального значения тягового тока, равного 0, и выходной сигнал устройства 42 вычитания подается в устройство 63 компенсации пульсаций. Устройство 63 компенсации пульсаций выполнено в виде, например, компенсирующего элемента, характеристики которого описываются передаточной функцией по формуле (5). В этой формуле Ks означает коэффициент усиления компенсирующего устройства, a s означает оператор дифферецирования:
Компенсирующий элемент, передаточная функция которого выражается формулой (5), имеет большой коэффициент усиления только вблизи частоты f0, а поскольку переменная составляющая с частотой finv0, присутствующая в токе Iq, является составляющей постоянного тока, величина которой равна IM•cos(φ-δ), такой компенсирующий элемент может воздействовать только на пульсации с частотой f0, не оказывая никакого влияния на частотные составляющие тока вблизи частоты finv0. По этой причине устройство, показанное на фиг.4, может работать так же, как и устройство, показанное на фиг.3, обладая при этом более простым по конструкции компенсирующим элементом. Кроме того, поскольку основным условием для выбора передаточной функции компенсирующего элемента является большое значение коэффициента усиления вблизи частоты f0, при выполнении этого условия передаточная функция может иметь и другой вид, отличный от формулы (5).
В схемах, показанных на фиг.3 и 4, в основе регулирования лежит учет пульсаций, содержащихся в тяговом токе Iq, однако для подавления биений в основу процесса регулирования надо заложить и учет пульсаций, содержащихся в токе Id возбуждения двигателя.
На фиг.5 показан еще один вариант выполнения изображенного на фиг.1 генератора 34 частоты компенсации пульсаций в инверторе. В генераторе, показанном на фиг.5, величины Id и Iq, которые определяются устройством 21 вычисления вектора тока, вводятся в устройство 64 вычисления момента двигателя, в котором по величинам Id и Iq вычисляется крутящий момент двигателя (Т= K•Id•Iq, где К является константой). По результатам вычислений детектор 65 пульсаций определяет пульсации момента двигателя с помощью, например, полосового фильтра, который выделяет частоту f0, равную частоте пульсаций, а выходной сигнал детектора 65 устройством 43 вычитания вычитается из номинального значения частоты пульсаций момента, равной 0, и полученная разность вводится в устройство 66 компенсации пульсаций момента. В данном варианте устройство 66 компенсации пульсаций момента представляет собой блок регулирования, состоящий из пропорционального и интегрального элементов, выходным сигналом которого является сигнал с частотой f компенсаций пульсаций в инверторе, при котором переменный момент, обусловленный пульсациями тока, становится равным нулю.
Схема, показанная на фиг.5, позволяет добиться большего эффекта в подавлении пульсаций развиваемого двигателем крутящего момента, поскольку объектом регулирования в ней является сам развиваемый двигателем крутящий момент.
На фиг. 6 показан еще один вариант выполнения показанного на фиг.1 генератора 34 частоты компенсации пульсаций в инверторе. В схеме, показанной на фиг. 6, как и в схеме, показанной на фиг.5, устройство 67 вычисления момента по величинам Id и Iq вычисляет развиваемый двигателем крутящий момент, значение которого в устройстве 44 вычитания вычитается из номинального значения, равного 0 (с целью инвертировать фазу вычисленного момента), и полученная разность вводится в устройство 68 компенсации пульсаций, передаточная функция компенсирующего элемента которого имеет вид, выраженный, например, как и в схеме по фиг.4, формулой (5), в результате чего в устройстве 68 компенсации пульсаций выделяется только частотная составляющая с частотой, равной частоте fc компенсации пульсаций в инверторе. Результат, получаемый в схеме, показанной на фиг.6, по существу ничем не отличается от результата, получаемого в схеме, показанной на фиг.5, однако достигается он более простыми средствами.
Следует подчеркнуть, что если передаточная функция компенсирующего элемента имеет высокий коэффициент усиления вблизи частоты f0, то она может отличаться от функции, выраженной формулой (5), которая в этом отношении никак не ограничивает объем изобретения.
Подтверждением основных преимуществ настоящего изобретения служат представленные в виде графиков изменения во времени различных параметров привода результаты моделирования привода с системой регулирования, выполненной по схеме, показанной на фиг.1 с использованием показанного на фиг.3 генератора 34 частоты, компенсирующей влияние пульсаций на работу инвертора. Моделирование проводилось при следующих исходных данных: двигатель переменного тока - трехфазный 4-полюсный асинхронный двигатель мощностью 100 кВт; напряжение постоянного тока инвертора - 1800 В; напряжение и частота пульсаций, наложенных на напряжение постоянного тока, - 100 В, 120 Гц; частота вращения двигателя - 110 Гц; частота скольжения - 5 Гц; ток двигателя (выходной ток инвертора) - 150 А.
На фиг. 7А-7Д показаны графики зависимости от времени различных параметров привода при использовании для его регулирования обычной системы регулирования по фиг.1, не имеющей генератора 34 частоты компенсации пульсаций в инверторе. На фиг.7А показан график изменения во времени входного напряжения инвертора, из которого видно, что во входном напряжении инвертора присутствует переменная составляющая с частотой, равной частоте пульсаций, возникающая при выпрямлении напряжения переменного тока источника мощности, частота которого равна 60 Гц. На фиг.7Б показан график изменения во времени фазного тока двигателя (выходного тока инвертора), из которого видно, что рабочая частота 115 Гц инвертора (finv=fr+fs) накладывается на частоту 5 Гц (= finv-f0) биений, равную разности между рабочей частотой и частотой пульсаций напряжения постоянного тока. При наличии таких биений максимальное значение тягового тока двигателя на рабочей частоте увеличивается на величину, определяемую амплитудой биений. На фиг.7В и 7Г показаны соответственно графики изменения во времени тока возбуждения и тягового тока, полученные при преобразовании координат показанного на фиг.7Б фазного тока двигателя во вращающуюся систему координат. Из графиков, показанных на фиг.7В и 7Г, видно, что соответствующие составляющие тока меняются с частотой пульсаций. На фиг. 7Д показан график изменения во времени выходного момента двигателя, из которого видно, что выходной момент двигателя также меняется с частотой пульсаций.
На фиг. 8А-8Д показаны те же самые, что и на фиг.7А-7Д, графики, полученные при моделировании привода с использованием в системе регулирования предлагаемого в настоящем изобретении генератора частоты, компенсирующей влияние пульсаций на работу инвертора. Несмотря на наличие в напряжении на входе инвертора связанных с выпрямлением переменного тока пульсаций фазные токи двигателя меняются только с рабочей частотой, что говорит о полном подавлении биений, вызванных возникающими при выпрямлении переменного тока пульсациями, как это следует из графика, показанного на фиг.8Б. Благодаря этому и величины Id, Iq и Т тока возбуждения, тягового тока и выходного момента двигателя являются по существу постоянными с очень небольшой переменной составляющей на частоте пульсаций. Значения составляющих тока и момента двигателя соответствуют рабочей частоте инвертора, а их постоянство во времени свидетельствует о том, что предлагаемая в настоящем изобретении система регулирования обеспечивает практически полное подавление биений, связанных с наличием пульсаций во входном напряжении инвертора.
Как уже было сказано выше, предлагаемая в настоящем изобретении система регулирования с обратной связью по тяговому току, в которой измеренная составляющая пульсаций в тяговом токе складывается с выходной частотой инвертора, позволяет полностью исключить возникновение пульсаций в тяговом токе двигателя и развиваемом им моменте и полностью подавить связанные с пульсациями биения тока и момента.
Поскольку в настоящем изобретении подавление биений осуществляется путем регулирования входной частоты инвертора, биения могут быть подавлены не только в том случае, когда выходное напряжение инвертора состоит из множества последовательно формируемых импульсов, но и при моноимпульсном выходном напряжении инвертора, когда регулирование выходного напряжения инвертора невозможно, как, например, в приводе электрического подвижного состава с использованием инвертора, у которого ширина импульса, формирующего выходное напряжение инвертора на одном цикле, равняется 180o (работа инвертора в моноимпульсном режиме).
На фиг.9 показана принципиальная схема блока регулирования, выполненного по другому варианту настоящего изобретения. Схема, показанная на фиг.9, отличается от схемы по фиг.1, наличием в ней генератора 38 сигнала с частотой fc2 компенсации по напряжению постоянного тока, определенному датчиком 141 напряжения постоянного тока, и сумматора 37, в котором выходной сигнал генератора 38 сигнала с частотой компенсации суммируется с сигналом задания рабочей частоты инвертора. В этом варианте изобретения генератор 38 сигнала с частотой компенсации используется для определения напряжения пульсаций, которое накладывается на входное напряжение постоянного тока инвертора и определяет степень пульсаций напряжения постоянного тока, и для формирования частоты пульсации как частоты fc2 компенсации, о чем более подробно говорится в JP-A 64-77492).
Поскольку схема, показанная на фиг.9, предусматривает предварительную прямую компенсацию пульсаций путем формирования сигнала, в котором обусловленная пульсациями переменная составляющая напряжения ed постоянного тока непосредственно влияет на частоту инвертора, и компенсацию пульсаций с использованием контура обратной связи, в котором частотная составляющая выходного тока инвертора подается на вход генератора частоты компенсации влияния пульсаций на работу инвертора, такая схема позволяет добиться более полного и более стабильного подавления вызванных пульсациями биений.
На фиг. 10 показана принципиальная схема блока регулирования, выполненного по третьему варианту настоящего изобретения. В отличие от схемы по фиг. 1, в которой используется способ компенсации выходной частоты инвертора, в схеме по фиг.10 используется способ прямой компенсации фазы инвертора с помощью устройства 90 вычисления фазы, которое вычисляет фазу θ0 инвертора по сигналу задания его частоты finv0, полученному в сумматоре 35, и сумматора 39, который суммирует фазу инвертора с выходным сигналом устройства 40 вычисления фазы компенсации, которое определяет фазу θc компенсации по частоте пульсаций, содержащихся в тяговом токе Iq. В качестве устройства 40 вычисления фазы компенсации можно использовать любое из устройств компенсации, показанных на фиг.3-6. Генератор 33 ШИМ-импульсов служит для генерирования ШИМ-сигналов, управляющих работой инвертора по сигналу V задания эффективного выходного напряжения инвертора и сигналу задания фазы θ выходного напряжения инвертора.
С учетом всего вышесказанного можно предположить, что в схеме, показанной на фиг.10, эффект подавления биений достигается, как и в ранее рассмотренных схемах, за счет прямой компенсации фазы выходного напряжения инвертора.
В рассмотренных ранее вариантах осуществления изобретения в качестве устройства регулирования использовались блоки векторного регулирования, которыми, однако, объем настоящего изобретения не ограничен. На фиг.11 показан блок регулирования, обеспечивающий поддержание на постоянном уровне отношения напряжения к частоте, а именно, блок регулирования V/f, использование которого также предусмотрено настоящим изобретением. В схеме, показанной на фиг.11, используются в основном элементы, которые обозначены теми же позициями, что и аналогичные элементы схемы, показанной на фиг.1, и которые поэтому не требуют повторного пояснения. Позицией 50 на схеме обозначен генератор сигнала задания частоты fs скольжения, который суммируется с сигналом измеренной частоты fr вращения двигателя с получением в сумме основной частоты finv0 инвертора. В устройстве 21 вычисления вектора тока фазные токи двигателя iu-iw подвергаются преобразованию координат во вращающуюся с фазой основной частоты систему координат с одновременным вычислением величины тягового тока Iq. Позицией 52 на схеме обозначено обеспечивающее поддержание на постоянном уровне отношения V/f устройство регулирования, которое выдает напряжение, пропорциональное основной частоте г- л. Позицией 34 на схеме обозначен генератор частоты компенсации пульсаций, который генерирует частоту fc компенсации по ранее вычисленной величине тягового тока Iq. Частота fc компенсации пульсаций складывается с основной частотой finv0 с получением рабочей (выходной) частоты finv инвертора. Позицией 33 на схеме обозначен генератор ШИМ-импульсов, выполняющий хорошо известное ШИМ-регулирование, основанное на использовании в качестве управляющих сигналов сигнала V задания выходного напряжения инвертора и сигнала θ0 задания фазы. Полученные в генераторе ШИМ-сигналы управляют работой инвертора 15. В данном варианте в качестве генератора 34 частоты компенсации пульсаций можно использовать любой из генераторов, показанных на фиг.3-6. Следует, однако, отметить, что при использовании генератора, показанного на фиг.5 и 6, устройством 21 вычисления вектора тока вычисляется ток возбуждения, который используется в процессе дальнейшего регулирования.
При использовании в системе регулирования регулятора V/f ток возбуждения и тяговый ток задаются заранее и поэтому значения тока возбуждения или тягового тока, вычисленные устройством 21 вычисления вектора тока, отличаются от действительных. Связано это с тем, что оси вычисленных составляющих тока смещены относительно истинных осей d-q вращающейся системы координат двигателя. Известно, что такое смещение осей увеличивается с уменьшением частоты двигателя. Поскольку, однако, полоса частот, в которой возникают биения, близка к 100 Гц, смещение осей в этом диапазоне частот оказывается достаточно небольшим, и поэтому возможное снижение точности вычисления Iq и Id также оказывается достаточно малым.
Следовательно, в этом варианте системы регулирования при суммировании частоты fc компенсации пульсаций, которые накладываются на входное напряжение постоянного тока инвертора, с основной частотой finv0 только в диапазоне частот, близких к частоте пульсаций, вызванных выпрямлением переменного тока, эффект подавления биений практически будет таким же, как и в системе регулирования, схема которой показана на фиг.1.
Из всего вышесказанного следует, что одной из особенностей настоящего изобретения является возможность его использования при любом способе регулирования инвертора, включая векторное регулирование и регулирование V/f.
В описанных выше схемах вариантов возможного выполнения настоящего изобретения был рассмотрен способ подавления биений, основанный на расчетном определении пульсаций в тяговом токе Iq, токе Id возбуждения и моменте Т двигателя и формировании сигнала обратной связи для соответствующего регулирования выходной частоты инвертора. Поскольку, однако, мгновенное значение входной мощности постоянного тока инвертора или, другими словами, произведение мгновенных значений напряжения и тока на входе инвертора пропорционально мгновенному значению момента двигателя, очевидно, что подавить обусловленные пульсациями биения можно, определив обусловленную пульсациями составляющую входной мощности постоянного тока инвертора, которую можно использовать в качестве сигнала обратной связи для регулирования выходной частоты инвертора.
На фиг. 12 показана принципиальная схема устройства регулирования, выполненного по пятому варианту изобретения. В отличие от схемы, показанной на фиг.1, в которой используется способ компенсации выходной частоты инвертора, основанный на определении частотной составляющей пульсаций в тяговом токе Iq, определенной расчетом после соответствующего преобразования координат устройством 21 вычисления вектора тока, в данном варианте используется способ компенсации не выходной частоты, а выходного напряжения V инвертора. Позицией 70 на схеме обозначен генератор компенсирующего напряжения Vc, определяемого по расчетному значению модуля вектора тягового тока Iq. Позицией 71 на схеме обозначен сумматор, который складывает напряжение Vc компенсации с сигналом V задания выходного напряжения, формируемым устройством 32 регулирования тока, и выдает сигнал управления выходным напряжением инвертора. В рассматриваемой схеме в качестве генератора 70 компенсирующего напряжения можно использовать любое из устройств регулирования, показанных на фиг.3 или 4. При применении устройства регулирования, показанного на фиг. 3, детектор 61 определяет сигнал с частотой f0 пульсаций, содержащихся в определенной расчетом тяговой составляющей тока Iq, после чего устройство 62 компенсации, включающее соответствующие компенсирующие элементы, такие как пропорциональный и интегральный элементы, выдает напряжение Vc компенсации, при котором сигнал с частотой f0 становится равным нулю.
Очевидно, что если выходное напряжение не находится в области насыщения, то эффект, получаемый при реализации этого варианта изобретения, будет таким же, как и при реализации схемы, изображенной на фиг.1.
На фиг.13 показана принципиальная схема блока регулирования, выполненного по шестому варианту изобретения. В отличие от схемы, показанной на фиг.1, в схеме по фиг.13 пульсации компенсируются регулированием выходного напряжения инвертора. Позицией 72 на схеме обозначено устройство вычисления вектора напряжения, в котором соответствующие измеренные мгновенные значения выходного напряжения фаз Vu-Vw инвертора преобразуются путем изменения системы координат в ортогональную вращающуюся систему координат, в которой вычисляются компоненты напряжения Vd и Vq. По крайней мере одна из полученных компонент напряжения (которой в схеме по фиг.13 является напряжение Vq) подается в генератор 73 частоты компенсации пульсаций, в котором формируется сигнал на частоте fc компенсации, который суммируется с сигналом рабочей частоты finv0 инвертора.
В этом варианте в качестве генератора 73 сигнала с частотой компенсации можно использовать одну из схем регулирования, показанных на фиг.3 или 4. При использовании схемы, показанной на фиг.3, детектор 61 определяет сигнал с частотой f0 пульсаций, присутствующих в определенном расчетом напряжении Vq, после чего устройство 62 компенсации, включающее соответствующие компенсирующие элементы, такие как пропорциональный и интегральный элементы, выдает сигнал с частотой fc, при котором сигнал с частотой f0 становится равным нулю.
В данном варианте системы регулирования, в отличие от системы регулирования, показанной на фиг.1, необходимо использовать датчик выходного напряжения инвертора и устройство вычисления вектора напряжения, предназначенные специально для компенсации пульсаций. Поскольку, однако, компенсация пульсаций в этом варианте осуществляется путем непосредственного определения разницы и положительных, и отрицательных значений выходного напряжения инвертора, которые вызывают биения, в итоге этот вариант изобретения будет отличаться от других большей точностью компенсации пульсаций и улучшенной амплитудно-частотной характеристикой привода.
Кроме того, в схеме, показанной на фиг.13, компенсация пульсаций осуществляется путем определения величины пульсаций в расчетном определяющем момент двигателя напряжении Vq. В этой связи необходимо отметить, что в этом варианте вместо компенсации пульсаций по их частоте их можно компенсировать и по фазе θ0.
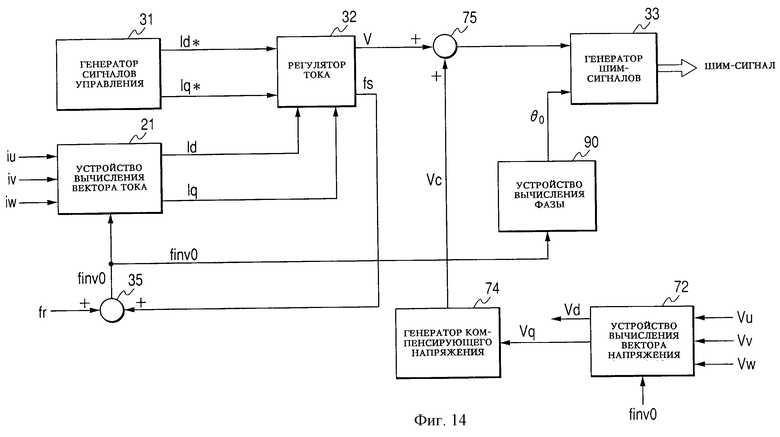
На фиг.14 показана принципиальная схема блока регулирования, выполненного по седьмому варианту изобретения. В отличие от схемы, показанной на фиг. 13, в которой используется принцип компенсации выходной частоты инвертора по переменной составляющей с частотой пульсаций, присутствующих в определяющем момент двигателя напряжении Vq, в схеме по фиг.14 используется способ компенсации пульсаций, основанный на изменении сигнала V задания выходного напряжения инвертора. Позицией 74 на схеме обозначен генератор напряжения Vc компенсации пульсаций, которое определяется определенной расчетом величиной напряжения Vq. Позицией 75 на схеме обозначен сумматор, который суммирует напряжение Vc компенсации с напряжением V задания напряжения инвертора, которое формируется устройством 32 регулирования тока, и выдает конечный сигнал задания выходного напряжения инвертора. В этом варианте в качестве генератора 74 можно использовать одну из схем регулирования, показанных на фиг.3 или 4. При использовании схемы, показанной на фиг.3, детектор 61 определяет сигнал с частотой f0 пульсаций, присутствующих в определяющем момент двигателя напряжении Vq, после чего устройство 62 компенсации, включающее соответствующие компенсирующие элементы, такие как пропорциональный и интегральный элементы, выдает напряжение Vc компенсации, при котором сигнал с частотой f0 становится равным нулю.
В том случае, когда выходное напряжение не находится в области насыщения, по своей эффективности с точки зрения снижения биений этот вариант изобретения практически ничем не отличается от варианта, выполненного по схеме, изображенной на фиг.13.
Промышленная применимость
Настоящее изобретение, которое основано на определении пульсаций в токе двигателя переменного тока, вызванных пульсациями, присутствующими в выпрямленном напряжении на входе инвертора, по определенной расчетом составляющей тока во вращающейся системе координат и выделении с высокой точностью переменной составляющей тока, обусловленной наличием пульсаций в выпрямленном напряжении на входе инвертора и используемой в качестве сигнала обратной связи для компенсации пульсаций, позволяет при изменяющейся рабочей частоте инвертора и выходных оборотах и нагрузке двигателя подавить возникающие из-за наличия во входном напряжении инвертора пульсаций биения без сложных корректировок коэффициента усиления и регулировки фазы. Кроме того, предлагаемый в настоящем изобретении способ подавления биений позволяет при наличии пульсаций во входном напряжении постоянного тока инвертора уменьшить емкость сглаживающего конденсатора, что является его несомненным преимуществом.
Настоящее изобретение может найти применение в системах привода с регулируемым инвертором, от которого работает двигатель переменного тока, который должен вращаться с переменной скоростью, при подаче на вход инвертора постоянного тока, полученного путем выпрямления с помощью соответствующего преобразователя переменного тока, и, в частности, в системе регулирования электропривода железнодорожного подвижного состава, когда в качестве источника мощности используется однофазный переменный ток, выпрямление которого сопровождается появлением пульсаций во входном постоянном токе инвертора, а также в различных бытовых электроприборах с регулируемым инвертором двигателем, таких, например, как воздушные кондиционеры, холодильники и посудомоечные машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1997 |
|
RU2193814C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ПОДВИЖНЫМ СОСТАВОМ | 2000 |
|
RU2179515C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭЛЕКТРОЭНЕРГИИ | 2009 |
|
RU2462806C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ С ЭЛЕКТРОПРИВОДОМ (ВАРИАНТЫ) | 2000 |
|
RU2192974C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2008 |
|
RU2410831C1 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2016 |
|
RU2707471C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ ДЛЯ ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2008 |
|
RU2463699C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2008 |
|
RU2440662C1 |
| ИНВЕРТОРНОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИНВЕРТОРОМ | 2011 |
|
RU2533167C1 |
| ПРЕОБРАЗОВАТЕЛЬ МОЩНОСТИ И СИСТЕМА ТЕПЛОВОГО НАСОСА, СНАБЖЕННАЯ ИМ | 2021 |
|
RU2817330C1 |











Изобретение относится к области электротехники и может быть использовано в системах привода с регулируемым инвертором. Техническим результатом является создание устройства для преобразования электрической мощности и способа управления им без использования сложной системы коррекции коэффициента усиления и разности фаз и подавления биений, вызванных пульсациями напряжения постоянного тока на входе инвертора. Устройство для преобразования электрической мощности имеет сглаживающий конденсатор, инвертор, соединенный с инвертором двигатель переменного тока и блок регулирования напряжения, частоты или фазы выходного переменного тока инвертора. Указанное устройство отличается наличием устройства регулирования, по крайней мере, либо напряжения, либо частоты, либо фазы переменного тока на выходе инвертора по переменной составляющей тока, частота которой равна частоте пульсаций, присутствующих в выходном переменном напряжении инвертора и возникающих из-за наличия пульсаций в постоянном токе на выходе выпрямителя. В результате в устройстве регулирования обеспечивается подавление биений, возникающих из-за наличия пульсации в постоянном токе на выходе выпрямителя. 2 с. и 10 з.п.ф-лы, 14 ил.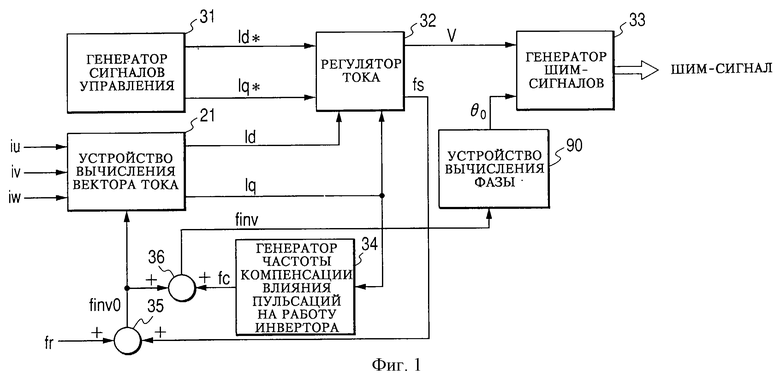
| Кипятильник для воды | 1921 |
|
SU5A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| Частотно-управляемый электропривод | 1990 |
|
SU1778906A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| US 4764712 А, 16.08.1988 | |||
| GB 1462674 А, 26.01.1976 | |||
| DE 3744905 А, 10.10.1991 | |||
| Прибор для непрерывного измерения толщины масляной пленки в подшипнике скольжения | 1950 |
|
SU91589A1 |

