Изобретение относится к техническим средствам, используемым в медицине, применяется для щупа, предназначенного для поиска биологических активных точек (БАТ).
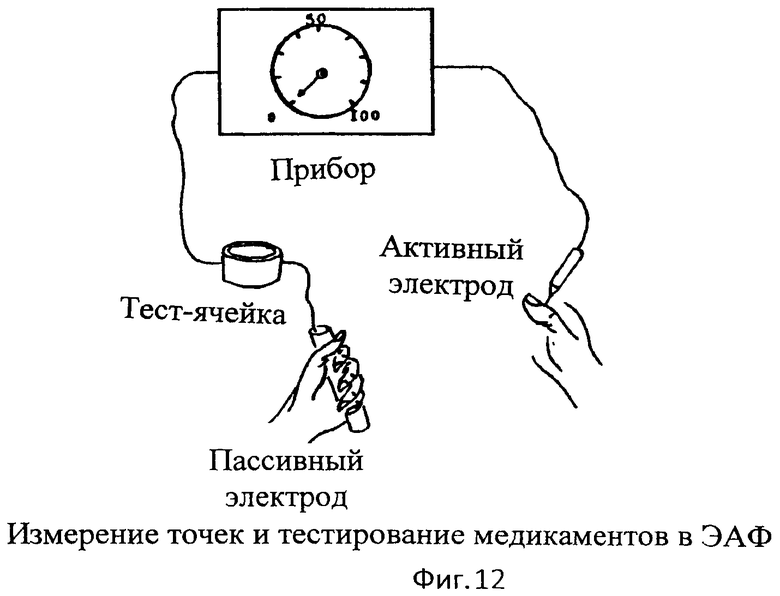
Известен способ регулирования усилия нажатия щупа, предназначенного для поиска БАТ, заключающийся в следующем. Приобретя достаточный навык в процессе работы с электродиагностическими приборами, специалист, на основании своего навыка, достигает оптимальной силы давления на БАТ (см книгу: Самохин А.В., Готовский Ю.В. Электропунктурная диагностика и терапия по методу Р.Фолля. М.: Центр интеллектуальных медицинских систем «ИМЕДИС», 1995, 448 с., см. стр.46). В этой книге сказано следующее. Навык достижения оптимальной силы давления на БАТ и выхода на «плато измерения» приобретается в процессе работы с электродиагностическими приборами и постоянного совершенствования техники измерения электрических параметров (ЭП) биологических активных точек. В указанной книге (см. рис.7, стр.19) показан активный электрод (щуп), а на стр.14 (см. рис.1 в указанной книге) показано использование активного электрода (указанные выше рисунки приведены на фиг.11 и 12 данного описания).
Совпадающими признаками указанного выше способа и заявленного способа являются следующие. Нажатие осуществляется так, чтобы обеспечить замеры при определенной (оптимальной) силе давления на БАТ.
Недостатки этого способа заключаются в следующем. Чтобы обеспечить заданное (оптимальное) значение силы давления на БАТ, требуется большой опыт работы.
Известен способ монтажа и регулирования усилия нажатия датчика для обнаружения точек иглоукалывания, принятый в качестве прототипа (см. описание к а.с. на изобретение СССР №198503, МПК5 A61H 39/02. БИ №10,1973 г.; в описании указано: М.кл. A61B 5/05 и исправлено на МПК A61H 39/02). Этот способ заключается в следующем. В датчике установлены два поисковых электрода, механически связанные через подвижный шток, регулировочная пружина, регулировочный винт и контактное кольцо, электрически контактирующее со штоком. Это обеспечивает объективное определение места точки иглоукалывания путем ограничения силы прижатия датчика к телу исследуемого. Для фиксации места точки иглоукалывания поисковые электроды выполнены полыми с каналами для подведения фиксирующего красителя, а с целью визуальной индикации электрода, расположенного над точкой иглоукалывания, в нем установлены два индикатора, например две разноцветные лампочки, каждая из которых соответствует определенному поисковому электроду.
На фиг.7 схематично изображен датчик по а.с. №198503. Датчик содержит корпус 31, в котором смонтированы подвижный шток 32, регулировочная пружина 33. Сила сжатия последней регулируется винтом 34. Шток пружиной 33 прижат к контактному кольцу 35. К концу штока прикреплена планка 36 из диэлектрика, в которой установлены два поисковых электрода 37. Кольцо и шток соединены электрически последовательно. Когда сила давления со стороны штока превышает силу сжатия пружины, контакт штока с кольцом прекращается и электрическая цепь размыкается. Соответствующий сигнал посылается в измерительную схему 38. Таким образом, измерение становится возможным лишь при давлении, не превышающем заданного значения.
В корпусе датчика размещены также две разноцветные индикаторные лампочки 39, каждая из которых соответствует определенному поисковому электроду. Лампочки сигнализируют об индикации точки иглоукалывания в месте нахождения соответствующего электрода.
Таким образом, способ монтажа и регулирования усилия нажатия заключается в том, что используют предварительно сжатую пружину, через которую усилие со стороны корпуса (на корпус воздействует человек усилием) передается к подвижному (относительно корпуса) штоку, а с помощью специального винта регулируют усилие предварительного сжатия пружины.
Совпадающими признаками указанного выше способа и заявленного способа являются следующие. Используется упругий элемент, для которого есть возможность менять настройку на требуемое значение усилия нажатия щупа. Причем упругий элемент имеет нелинейную силовую характеристику. При небольших усилиях со стороны штока упругий элемент почти не деформируется. А при превышении некоторого «критического» значения усилия упругий элемент начинает заметно деформироваться. При этом упругий элемент крепят так, что он является звеном в цепочке деталей, по которым усилие нажатия, приложенное к корпусу щупа, передается к штоку щупа.
Недостатки этого способа заключаются в следующем. При использовании щупа, монтаж которого проведен этим способом, также требуется большой опыт работы, т.к. при повышенном усилии щуп «отключается». Но если нет достаточного опыта, то сложно «предугадать» тот момент, когда усилие будет близко к «критической» величине.
При использовании предлагаемого способа монтажа щупа, при приближении усилия к «критической» величине перемещение заметно возрастает при незначительном увеличении усилия. Это помогает «предугадать», что усилие приближается к «критическому» значению.
Задача изобретения заключается в том, чтобы провести так монтаж деталей и использовать такой упругий элемент, чтобы щуп одновременно удовлетворял указанным ниже требованиям. Во-первых, чтобы для использования щупа не требовалось большого опыта, т.е., чтобы специалист (врач) не только на основе своего большого опыта (навыка) предугадывал, что усилие нажатия на щуп приближается к требуемому значению, но и на основании других ощущений, в частности, за счет резкого увеличения перемещения при приближении усилия к требуемому значению. Во-вторых, чтобы регулировалось усилие нажатия, причем, чтобы для выбранного усилия нажатия была возможность проводить замеры при несколько меньшем и при несколько большем усилии.
В заявленном способе в качестве упругого элемента (упругой опоры) используется устройство известное как подвеска (патент RU 2048998, МПК6 В60N 2/50, БИ №33, 1995 г.), ее прямое назначение - использование в качестве подвески сидений транспортных средств. (В случае диагностического щупа предлагается использовать аналогичную подвеску малых размеров).
В описании к патенту RU 2048998 приведены указанные ниже данные о подвеске.
Для решения технической задачи в подвеске, содержащей неподвижную и подвижную относительно нее опоры, соединенные между собой разнесенными в поперечном направлении проставками и упругим элементом, выполненным по крайней мере в виде одной упругой пластины, один конец по крайней мере одной упругой пластины жестко зафиксирован относительно противолежащего конца, который установлен с возможностью фиксированного перемещения по траектории относительно зоны жесткого крепления конца упругой пластины в плоскости ее деформации. Один конец упругой пластины жестко соединен с неподвижной опорой, а противолежащий конец - с подвижной опорой. Конец упругой пластины, обращенной в сторону неподвижной опоры, установлен с возможностью фиксированного перемещения по траектории относительно зоны жесткого крепления конца упругой пластины, обращенной в сторону подвижной опоры в плоскости ее деформации. Концы по крайней мере одной упругой пластины установлены с возможностью фиксированного перемещения по траектории относительно предварительно жестко зафиксированного противолежащего конца упругой пластины в плоскости ее деформации. Один конец по крайней мере одной упругой пластины установлен с возможностью фиксированного перемещения вдоль соответствующей опоры между нижней и ее верхней частями. Упругий элемент установлен под восходящим углом к горизонтали в сторону подвижной опоры. Упругий элемент направлен от нижней части неподвижной опоры к верхней ее части. Подвеска снабжена дополнительным упругим элементом. Дополнительный упругий элемент симметрично установлен в поперечном направлении относительно упругого элемента. Конец по крайней мере одной упругой пластины каждого упругого элемента установлен с возможностью фиксированного перемещения по траектории относительно предварительно жестко зафиксированного относительно него противолежащего конца той же пластины в плоскости ее деформации. Упругий и дополнительный упругий элементы установлены параллельно один другому и направлены в одну сторону. Упругий и дополнительный упругий элементы выполнены идентичными. Упругие пластины пакета имеют одинаковую длину. Проставки выполнены в виде гибких элементов с минимальным удлинением при растяжении, а их концы жестко закреплены с соответствующими неподвижной и подвижной опорами. Каждый элемент с минимальным удлинением при растяжении выполнен в виде пакета пластин. Пластины пакета проставок и пластины упругих элементов выполнены из одного материала. Пластины пакета проставок и пластины упругих элементов имеют одинаковую толщину. Число пластин в каждом пакете проставки отлично от числа пластин в каждом пакете упругого элемента. Число пластин в каждом пакете проставки меньше числа пластин в каждом пакете упругого элемента. Подвеска содержит сдвоенные по вертикали проставки, а упругий элемент совпадает с плоскостью, проведенной через диагональ параллелограмма, образованного сдвоенными проставками и подвижной и неподвижной опорами, в каждом из сдвоенных по вертикали пакетов пластин проставок число пластин нижнего набора равно числу пластин верхнего набора. В каждом из сдвоенных по вертикали пакетов пластин проставки число пластин нижнего набора отлично от числа пластин пакета верхнего набора. В каждом из сдвоенных по вертикали пакетов пластин проставки число пластин пакета нижнего набора больше числа пластин пакета верхнего набора. Число пластин в каждом из пакетов проставки и упругих элементов четное, а в каждом из пакетов упругих элементов - нечетное и наоборот. Подвеска снабжена элементами с минимальным крутящим моментом в плоскости деформации и жесткими в плоскости, перпендикулярной к плоскости деформации, симметрично установленными относительно вертикальной плоскости симметрии и закрепленными своими концами с возможностью поворота на неподвижной и подвижной опорах. Элементы с минимальным крутящим моментом установлены с внешней стороны соответствующей проставки. Элементы с минимальным крутящим моментом установлены параллельно соответствующей проставке. Элементы с минимальным крутящим моментом соединены с серединами по вертикали подвижной и неподвижной опор. Элементы с минимальным крутящим моментом соединены с подвижной и неподвижной опорами через сайлент-блоки и выполнены в виде штанг.
На основании данных, изложенных в первом пункте формулы изобретения по патенту RU 2048998, можно более кратко охарактеризовать подвеску по патенту RU 2048998 следующими словами. Подвеска, содержащая неподвижную и подвижную относительно нее опоры, соединенные между собой разнесенными в поперечном направлении проставками и упругим элементом, выполненным по крайней мере в виде одной упругой пластины, установленной под восходящим углом к горизонтали в сторону подвижной опоры, и направленным от нижней части неподвижной опоры к верхней части подвижной опоры. Причем один из концов по крайней мере одной упругой пластины жестко зафиксирован относительно противолежащего конца, который установлен с возможностью фиксированного перемещения по траектории относительно зоны жесткого крепления конца упругой пластины в плоскости ее деформации. При этом проставки выполнены в виде гибких пластин с минимальным удлинением при растяжении, а их концы жестко закреплены на соответствующих неподвижной и подвижной опорах. А подвеска снабжена элементами с минимальным крутящим моментом в плоскости деформации и жесткими в плоскости, перпендикулярной плоскости деформации, симметрично установленными относительно вертикальной плоскости симметрии, закрепленными своими концами с возможностью поворота на неподвижной и подвижной опорах и выполненными в виде штанг, установленных с внешней стороны соответствующей проставки параллельно ей.
Сущность изобретения заключается в следующем. К корпусу щупа крепят упругую опору, известную как подвеска по патенту RU 2048998. // Расчеты показали, что в этом случае детали, обозначенные номером 5 на фиг.1 и 2, могут иметь параметры, близкие к параметрам лезвия бритвы: толщина около 0,1 мм, длина рабочей части (расстояние между зонами защемления концов деталей №5) около 40 мм; используется набор из нескольких таких деталей. // Причем эта упругая опора снабжена деталями, предназначенными для обеспечения взаимодействия между упругой опорой, закрепленной на корпусе щупа, и подвижным штоком щупа. Причем эти детали включают пластину из полиамида, закрепленную на подвижной опорной площадке упругой опоры, а также дополнительный опорный элемент из полиамида, имеющий скругленную поверхность, например в форме полушара. Причем этот дополнительный опорный элемент закреплен на штоке так, что скругленная поверхность взаимодействуете пластиной из полиамида. Причем этот дополнительный опорный элемент имеет возможность скользить по пластине из полиамида при осадке упругой опоры под воздействием усилия, приложенного к корпусу щупа. При этом пластина из полиамида и дополнительный опорный элемент из полиамида, имеющий скругленную поверхность, выполняют функцию опорной детали, обеспечивающей взаимодействие упругой опоры с подвижным штоком щупа. При этом для регулирования усилия нажатия щупа производят фиксированное перемещение конца по крайней мере одной упругой пластины (являющейся составной частью подвески по патенту RU 2048998, см. позицию 5 на фиг.1), который установлен с возможностью фиксированного перемещения (см. позицию 6 на фиг.1). При выборе оптимального уровня усилия нажатия щупа производят контрольные замеры с помощью щупа.
На фиг.1-5 приведены данные о подвеске, указанные в описании к патенту RU 2048998.
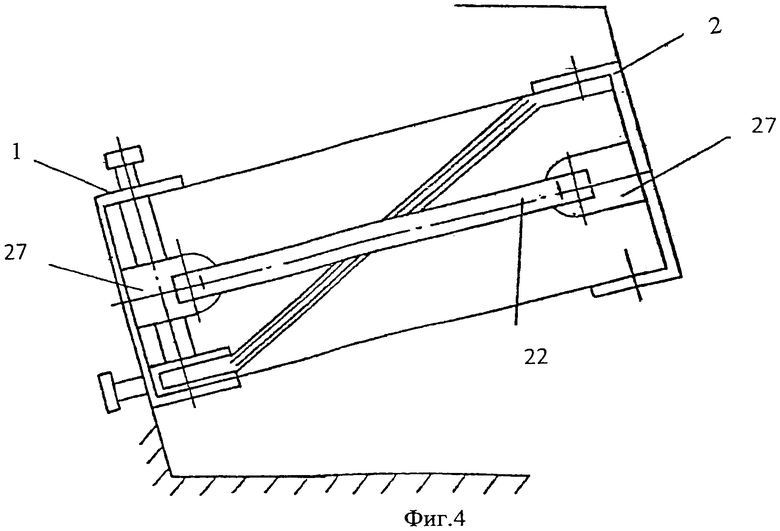
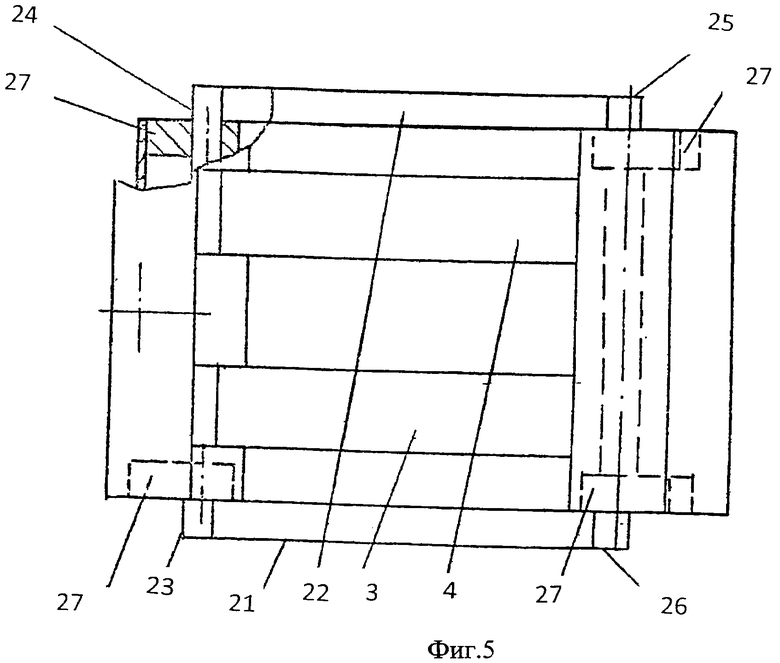
На фиг.1 изображен один из вариантов подвески, общий вид; на фиг.2 - то же, вид сверху; на фиг.3 - подвеска под нагрузкой, общий вид; на фиг.4 - подвеска с дополнительным упругим элементом, общий вид; на фиг.5 - подвеска, снабженная элементами с минимальным крутящим моментом в плоскости деформации и жестким в плоскости, перпендикулярной к плоскости деформации.
Для удобства осуществления регулировки усилия нажатия щупа следует подвеску установить «вверх ногами», такое положение подвески показано на фиг.6 (фиг.6 - это перевернутое изображение фиг.4 и дополнительные элементы).
На фиг.7 схематично изображен датчик по а.с. №198503.
На фиг.8 показан щуп в сборе с подвеской.
На фиг.9 показаны примеры силовых характеристик подвески при разных настройках жесткости подвески, по оси Х указаны значения вертикального смещения, по оси Y указаны значения вертикального усилия.
На фиг.10 показан процесс деформирования отдельно взятого бруса малой жесткости.
На фиг.11 показан активный электрод (щуп).
На фиг.12 показано использование активного электрода. Рисунки на фиг.11 и 12 взяты из книги: Самохин А.В., Готовский Ю.В. Электропунктурная диагностика и терапия по методу Р.Фолля. М.: Центр интеллектуальных медицинских систем «ИМЕДИС», 1995, 448 с., (см. рис.7 на стр.19 и рис.1 на стр.14).
Подвеска содержит неподвижную и подвижную относительно нее опоры 1 и 2, соединенные между собой разнесенными в поперечном направлении проставками 3 и 4 и упругим элементом, выполненным по крайней мере в виде одной упругой пластины 5. Один из концов 6 или 7 по крайней мере одной упругой пластины 5 жестко зафиксирован относительно противолежащего конца 7 или 6, который установлен с возможностью фиксированного перемещения по траектории относительно зоны жесткого крепления конца 6 или 7 упругой пластины 5 в плоскости ее деформации. Один конец 6 упругой пластины 5 жестко соединен с неподвижной опорой 1, а противолежащий конец 7 - с подвижной опорой.
Конец 6 упругой пластины 5, обращенной в сторону неподвижной опоры 1, установлен с возможностью фиксированного перемещения по траектории относительно зоны жесткого крепления конца 7 упругой пластины 5, обращенной в сторону подвижной опоры 2 в плоскости ее деформации. Каждый из концов 6 или 7 по крайней мере одной упругой пластины 5 установлен с возможностью фиксированного перемещения по траектории относительно предварительно жестко зафиксированного противолежащего конца 7 или 6 упругой пластины 5 в плоскости ее деформации. Один конец 6 или 7 по крайней мере одной упругой пластины 5 установлен с возможностью фиксированного перемещения вдоль соответствующей опоры 1 или 2 между нижней и ее верхней частями 8 или 11 и 9 или 11. Упругая пластина 5 установлена под восходящим углом к горизонтали в сторону подвижной опоры. Упругая пластина 5 направлена от нижней части 8 неподвижной опоры 1 к верхней части 11 подвижной опоры 2. Подвеска снабжена дополнительным упругим элементом 12. Дополнительный упругий элемент 12 симметрично установлен в поперечном направлении относительно упругого элемента 5. Конец 6, 7 или 13, 14 по крайней мере одной упругой пластины каждого упругого элемента 5 или 12 установлен с возможностью фиксированного перемещения по траектории относительно предварительно жестко зафиксированного относительно него противолежащего конца 7, 6 или 14, 13 той же пластины 5 или 12 в плоскости ее деформации. Упругий и дополнительный упругий элементы 5 и 12 установлены параллельно один другому и направлены в одну сторону. Упругий и дополнительный упругий элементы 5 и 12 выполнены идентичными. Упругие пластины пакета имеют одинаковую длину. Проставки 3 и 4 выполнены в виде гибких элементов с минимальным удлинением при растяжении, а их концы 15, 17 и 16, 18 жестко закреплены с соответствующими неподвижной и подвижной опорами. Каждый элемент проставок 3 и 4 с минимальным удлинением при растяжении выполнен в виде пакета пластин. Пластины пакета проставок и пластины упругих элементов выполнены из одного материала. Пластины пакета проставок 3 и 4 и пластины упругих элементов 5 и 12 выполнены одинаковой толщины. Число пластин в каждом пакете проставки 3 или 4 отлично от числа пластин в каждом пакете упругого элемента 5 или 12. Число пластин в каждом пакете проставки 3 или 4 меньше числа пластин в каждом пакете упругого элемента 5 или 12. Подвеска, содержащая сдвоенные по вертикали проставки 3, 19 и 4, 20 упругий элемент 5 или 12, совпадает с плоскостью, проведенной через диагональ параллелограмма, образованного сдвоенными проставками 3, 19 и 4, 20 и подвижной и неподвижной опорами 2 и 1. В каждом из сдвоенных по вертикали пакетов пластин проставок 3, 19 и 4, 20 число пластин нижнего набора 19, 20 равно числу пластин верхнего набора 3, 4. В каждом из сдвоенных по вертикали пакетов пластин 19, 20 проставки число пластин нижнего набора отлично от числа пластин пакета верхнего набора 3, 4. В каждом из сдвоенных по вертикали пакетов пластин проставки число пластин пакета нижнего набора 19, 20 больше числа пластин пакета верхнего набора 3, 4. Число пластин в каждом из пакетов проставки 3, 4, 19 и 20 и упругих элементов 5 и 12 четное, а в каждом из пакетов упругих элементов 5 и 12 - нечетное, и наоборот. Подвеска снабжена элементами 21 и 22 с минимальным крутящим моментом в плоскости деформации и жесткими в плоскости, перпендикулярной к плоскости деформации, симметрично установленными относительно вертикальной плоскости симметрии и закрепленными своими концами 23, 24 и 25, 26 с возможностью поворота на неподвижной и подвижной опорах 1 и 2. Элементы 21 и 22 с минимальным крутящим моментом установлены с внешней стороны соответствующей проставки 4 и 3. Элементы 21 и 22 с минимальным крутящим моментом установлены параллельно соответствующей проставки 4 и 3. Элементы 21 и 22 с минимальным крутящим моментом соединены с серединами по вертикали подвижной и неподвижной опор 2 и 1. Элементы 21 и 22 с минимальным крутящим моментом соединены с подвижной и неподвижной опорами 2 и 1 через сайлент-блоки 27 и выполнены в виде штанг.
В одном из вариантов подвеска работает следующим образом.
В ненагруженном состоянии вся конструкция подвески как бы установлена под восходящим углом к горизонтали. При воздействии на подвижную опору вертикальной силы Р (например, вес оператора) проставки, выполненные в виде пластин 3, 4 и 19, 20, обладая малой жесткостью на изгиб в плоскости деформации, прогибаются и переходят в новое положение, но, сохраняя прежнюю длину, остаются параллельными друг другу и таким образом трансформируют всю подвижную часть конструкции в новое положение. При этом диагональ параллелограмма (который образован подвижной и неподвижной опорами 1 и 2 и сдвоенными проставками 4 и 20), вдоль которой установлен упругий элемент 5, сокращается, что влечет за собой возникновение силы F от сжатия упругого элемента 5, направленной вдоль диагонали, и момента изгиба М. В состоянии равновесия совместное действие силы F и момента М компенсирует действие нагрузки Р. Характер изменения силовых факторов F и М нелинейный и соответствует требуемому виду силовой характеристики - большая жесткость на начальном участке и малая на рабочем. Такой вид силовой характеристики всей подвижной части конструкции подвески имеет малую частоту собственных колебаний (эффективную виброзащиту) на рабочих ходах подвески при сравнительно малой статической осадке от веса оператора. Регулировка грузоподъемности подвески изменяется положением конца 6 упругого элемента 5, т.е., например, его перемещением с возможностью фиксирования вдоль направляющей 28, при жестко фиксированном противоположном конце 7 или наоборот. Причем направляющая 28 может иметь различную геометрическую форму, т.е. может быть изогнутой или установлена под различными углами, т.е. траектория перемещения, например, конца 6 гибкого элемента 5 может быть различна. При этом чем ближе, например, конец 6 упругого элемента 5 к верхней проставке 4, тем меньше грузоподъемность подвески. В зависимости от требуемых собственной частоты подвески, ее грузоподъемности и их сочетания возможно изменение в конструкции таких элементов, как количество гибких пластин, их геометрических параметров. Элементы 21 и 22 увеличивают поперечную жесткость подвески, тем самым уменьшают крен сиденья оператора при несимметричном силовом воздействии на подвеску.
Для удобства осуществления регулировки усилия нажатия щупа следует подвеску установить «вверх ногами», такое положение подвески показано на фиг.6 (фиг.6 - это перевернутое изображение фиг.4 и дополнительные элементы). Деталь 45 - это пластина из полиамида.
Фигуры 1-5 взяты из описания к патенту RU 2048998, (МПК6 B60N 2/50, БИ №33, 1995 г.). На этих фигурах добавлены обозначения элементов, которые не были обозначены («занумерованы») в описании к этому патенту, но которые изображены на фигурах в описании к этому патенту. На фиг.1 добавлены обозначения: 29 - амортизатор, который способствует затуханию колебаний подвески; 30 - рукоятка устройства для регулирования грузоподъемности подвески.
На фиг.7 схематично изображен датчик по а.с. №198503. Датчик содержит корпус 31, в котором смонтированы подвижный шток 32, регулировочная пружина 33. Сила сжатия последней регулируется винтом 34. Шток пружиной 33 прижат к контактному кольцу 35. К концу штока прикреплена планка 36 из диэлектрика, в которой установлены два поисковых электрода 37. Кольцо и шток соединены электрически последовательно. Когда сила давления со стороны штока превышает силу сжатия пружины, контакт штока с кольцом прекращается и электрическая цепь размыкается. Соответствующий сигнал посылается в измерительную схему 38. Таким образом, измерение становится возможным лишь при давлении, не превышающем заданного значения.
В корпусе датчика размещены также две разноцветные индикаторные лампочки 39, каждая из которых соответствует определенному поисковому электроду. Лампочки сигнализируют об индикации точки иглоукалывания в месте нахождения соответствующего электрода.
На фиг.8 показан щуп в сборе. Детали 1 и 2 - это детали подвески (см. фиг.6). 41 - корпус щупа (см. аналогичную деталь 31 на фиг.7). 42 - подвижный шток щупа (см. аналогичную деталь 32 на фиг.7). 43 - сменный насадок на подвижный шток. 44 - «прилив» у корпуса щупа для размещения подвески (см. детали 1, 2 и другие на фиг.8). 45 - пластина из полиамида, жестко скрепленная с деталью 2. 46 - деталь из полиамида скругленной формы (например, в форме полушара), жестко закрепленная на подвижном штоке 42. Деталь 47 служит для жесткой связи детали 1 с деталью 48. Элемент 49 - это продолжение детали 48. Элемент 49 выполнен в виде цилиндра. В зоне соединения элемента 49 с деталью 48 образуется уступ. В этот уступ упирается деталь 50. Элемент 49 является осью вращения детали 50. Деталь 50 снаружи снабжена резьбой и при вращении детали 50, она перемещается вверх (или вниз) по резьбе 51 в корпусе щупа. Для обеспечения доступа к детали 50 и обеспечения возможности вращения детали 50 в корпусе щупа могут быть сделаны, например, вертикальные прорези (на фиг.8 не показаны). Перемещаясь вверх (или вниз), деталь 50 увлекает за собой деталь 48, что вызывавет перемещение деталей 47, 1 и других. При этом, если есть зазор между деталями 45 и 46, перемещаются по вертикали (т.е. вдоль оси вращения детали 50) детали 2 и 45.
Деталь 50 закрепляется на элементе 49, например, с помощью шайбы 52 и шплинта 53. Должен быть обеспечен доступ к элементу 30, для этого в элементе 44 можно сделать вырез 54 и установить шторку 55 из мягкого материала для защиты от проникновения пыли внутрь корпуса щупа.
Деталь 56 представляет собой контакт на пружинке, он может замыкать электрическую цепь, когда перемещение по вертикали подвижного штока 42 примерно равно половине от максимального перемещения Umax. //Некоторые зазоры между деталями на фиг.8 показаны в увеличенном виде//.
На детали 1 (см. фиг.8) можно установить шкалу, показывающую усилие нажатия щупа, на которое настроена подвеска в данный момент (эта шкала на фиг.8 не показана).
Следует заметить, что при работе с щупом может использоваться электрическая схема, аналогичная, показанной на фиг.7.
На фиг.9 показаны примеры силовых характеристик подвески при разных настройках жесткости подвески, по оси Х указаны значения вертикального смещения, по оси Y указаны значения вертикального усилия. (Например, можно принять Umax=15…20 мм, Pmax=2,5 кгс (25 Н)).
На фиг.10 показан процесс деформирования отдельно взятого бруса малой жесткости. На фиг.10 указаны символы, обозначающие: Р - сила, действующая на брус малой жесткости, М - изгибающий момент, т.п. - точки перегиба, образовавшиеся при изгибе бруса малой жесткости.
Анализ данных, приведенных в книге Е.П.Попова (Попов Е.П. Теория и расчет гибких упругих деталей. Плоский изгиб бруса малой жесткости при больших упругих перемещениях. Ленинград, Издание ЛКВВИА, 1947, 303 с.), позволил получить следующее (применительно к рассматриваемым случаям нагружения гибких элементов). 1) Если упругий брус малой изгибной жесткости под действием сжимающей силы изогнулся так, что образовалось две точки перегиба, то линия действия сжимающей силы будет параллельна прямой, проходящей через эти точки перегиба (см. фиг.10). Таким образом, если в процессе нагружения точки перегиба смещаются и меняется угол наклона прямой, проходящей через точки перегиба, то меняется и направление сжимающей силы. 2) Положение равновесия с тремя точками перегиба является неустойчивым. Поэтому, если нет дополнительных опор, то если «случайно» в системе образовалось три точки перегиба, то система самопроизвольно перейдет в другое - устойчивое положение равновесия (например, с двумя точками перегиба). Таким образом, основным расчетным случаем является случай, когда в системе образовалось две точки перегиба (так деформируются элементы, обозначенные номером 5 на фиг.1).
Расчеты с использованием теории Е.П. Попова аналогичных конструкций показали, что для заданного смещения теория дает завышенные расчетные значения нагрузок по сравнению с экспериментом. Это, видимо, объясняется тем, что изложенная в книге Е.П. Попова теория базируется на гипотезе плоских сечений, но, видимо, в зонах заделки концов тонких гибких брусьев, а также в зонах точек перегиба, гипотеза плоских сечений не совсем точно описывает поведение материала. Специальные испытания отдельно взятой тонкой гибкой упругой полоски при различных условиях нагружения (в том числе, без точек перегиба, с одной точкой перегиба, с двумя точками перегиба и т.п.) позволили обоснованно выбрать значения поправочных коэффициентов и теоретически предсказанные диаграммы деформирования конструкции (аналогичной с подвеской) стали близки к экспериментальным диаграммам.
В книге (Самохин А.В., Готовский Ю.В. Электропунктурная диагностика и терапия по методу Р.Фолля. М.: Центр интеллектуальных медицинских систем «ИМЕДИС», 1995, 448 с.) на стр.45 указано, что оптимальной силой давления «активного» электрода-щупа на БАТ является величина, лежащая в пределах:
- для электрода диаметром 2 мм - 500-1000 грамм-сила,
- для электрода диаметром 3 мм - 600-1100 грамм-сила,
- для электрода диаметром 4 мм - 700-2000 грамм-сила.
В книге: Крамер Ф. Учебник по электроакупунктуре. Том 1. Пер. с нем. М.: ИМЕДИС, 1995, 192 с. на стр.61 указано значение силы прижатия электрода - менее 300 гс.
Таким образом, желательно, чтобы была возможность регулировать усилие нажатия щупа в пределах от 0,25 до 2 кгс (от 2,5 до 20 Н). Расчеты на основе теории Е.П.Попова с учетом поправочных коэффициентов показали, что для обеспечения регулирования усилия нажатия щупа в пределах от 0,25 до 2 кгс (от 2,5 до 20 Н), детали, обозначенные номером 5 на фиг.1 и 2, могут иметь параметры, близкие к параметрам лезвия бритвы: толщина около 0,1 мм, длина рабочей части (расстояние между зонами защемления концов деталей №5) около 40 мм; используется набор из нескольких таких деталей. В отличие от подвески по патенту RU 2048998, предназначенной для подвески сидений водителей, в случае использования подвески для щупа, можно обойтись без амортизатора, показанного на фиг.1, см. №29. Поэтому здесь не требуется, чтобы детали №5 и №12 составляли два симметричных набора упругих гибких пластин удлиненной формы. Выше было упомянуто лезвие бритвы, так упругая гибкая деталь №5 может быть изготовлена из сплошной пластины. //Лезвие бритвы обычно имеет удлиненное отверстие с фигурным вырезом, а здесь можно использовать сплошную пластину (без отверстий)//.
Т.е. элементы 5 и 12 могут быть единой пластиной (без «зазора» между ними; используется набор таких пластин).
На основании данных, изложенных в первом пункте формулы изобретения по патенту RU 2048998 (с учетом того, что при монтаже деталей щупа удобно расположить подвеску по патенту RU 2048998 «вверх ногами» (см. фиг.6 и 8); для удобства составления описания изобретения предполагаем, что в данный момент времени щуп расположен вертикально; при нажатии щупом на БАТ деталь 2 на фиг.8 оказывается подвижной относительно корпуса щупа 41 (в данном случае деталь 2 выполняет роль подвижной опоры для подвески), а деталь 1 на фиг.8 оказывается неподвижной относительно корпуса щупа 41 (в данном случае деталь 1 выполняет роль неподвижной опоры для подвески)), можно более кратко охарактеризовать подвеску по патенту RU 2048998 следующими словами (фактически, при настройке на нужное усилие нажатия щупа, деталь 1 (см. фиг.8) может смещаться с помощью детали 50, кроме того, возможно наличие люфтов в резьбе детали 50 и т.п., но условно считаем, что при нажатии щупа на БАТ, в данный момент времени деталь 1 неподвижна относительно корпуса щупа 41):
Подвеска содержит неподвижную и подвижную относительно нее опоры, соединенные между собой разнесенными в поперечном направлении проставками и упругим элементом, выполненным по крайней мере в виде одной упругой пластины, установленной под восходящим углом к горизонтали в сторону неподвижной опоры, и направленным от нижней части подвижной опоры к верхней части неподвижной опоры. Причем один из концов по крайней мере одной упругой пластины жестко зафиксирован относительно противолежащего конца, который установлен с возможностью фиксированного перемещения по траектории относительно зоны жесткого крепления конца упругой пластины в плоскости ее деформации. При этом проставки выполнены в виде гибких пластин с минимальным удлинением при растяжении, а их концы жестко закреплены на соответствующих неподвижной и подвижной опорах. А подвеска снабжена элементами с минимальным крутящим моментом в плоскости деформации и жесткими в плоскости, перпендикулярной плоскости деформации, симметрично установленными относительно вертикальной плоскости симметрии, закрепленными своими концами с возможностью поворота на неподвижной и подвижной опорах и выполненными в виде штанг, установленных с внешней стороны соответствующей проставки параллельно ей.
Как указано в описании к патенту RU 2048998, конец 6 упругой пластины 5 (см. фиг.1) установлен с возможностью фиксированного перемещения. Регулировка грузоподъемности подвески изменяется при изменении положения конца 6 упругого элемента 5; т.е. например, его перемещением с возможностью фиксирования вдоль направляющей 28 (см. фиг.1). В описании к патенту RU 2048998 говорится о грузоподъемности подвески. Грузоподъемность подвески характеризуется величиной усилия при перемещении, примерно равном половине максимального перемещения (см. фиг.9). //В случае щупа грузоподъемность подвески будет равна оптимальному усилию нажатия щупа//.
Работу подвески по патенту RU 2048998 можно пояснить следующими словами. Детали 1 и 2 (см. фиг.1 и 8) достаточно жесткие. Детали 4 и 20 (см. фиг.1) (а также аналогичные детали 3, 19 (см. фиг.2)) представляют собой тонкие гибкие пластины удлиненной формы (фактически эти элементы могут представлять собой набор из нескольких рядом (в смысле по толщине набора) расположенных тонких гибких пластин.
Элементы 5 и 12 (см. фиг.1 и 2) также представляют собой тонкие гибкие пластины удлиненной формы (или набор из пластин). Концы упомянутых выше гибких пластин скреплены с деталями 1 и 2 так, что эти концы не поворачиваются и не смещаются соответственно относительно деталей 1 и 2.
При возрастании от нуля силы Р (см. фиг.3) тонкие гибкие пластины 4 и 20 (см. фиг.1) (и аналогичные пластины 3,19 (см. фиг.2)) растягиваются. А тонкие гибкие пластины 5, 12 (см. фиг.1 и 2) подвергаются при этом действию сжимающей нагрузки. При этом, при малых значениях силы Р (см. фиг.3) подвеска мало деформируется (точка приложения силы Р почти не смещается.
При достижении силой Р некоторого критического значения, сила, сжимающая тонкие гибкие пластины 5 и 12 (см. силу F на фиг.3) приводит к потери устойчивости этих пластин (образуется две точки перегиба, см. фиг.3 и фиг.10). При этом, деталь 2 (см. фиг.1) получает заметное перемещение по вертикали (см. фиг.3). Причем деталь 2 перемещается поступательно (почти не поворачиваясь).
Итого, если силу Р (см. фиг.3) увеличивать плавно, то деталь 2 (см. фиг.1) сначала почти не перемещается, затем, после достижения «критического» значения силой Р, незначительное увеличение силы Р приводит к заметному смещению детали 2 (см. фиг.1, фиг.3, фиг.9).
Меняя расстояние между узлами 6 и 15 (см. фиг.1), можно изменить «критическое» значение силы Р (см. фиг.3), при котором тонкие гибкие пластины 5 и 12 (см. фиг.1 и 2) теряют устойчивость. Примеры силовых характеристик этой подвески см. на фиг.9.
При регулировании величины усилия, на которое настроена подвеска (т.е. при перемещении узла 6 относительно узла 15 (см. фиг.1) деталь 2 перемещается поступательно не только по вертикали (см. фиг.1 и 3), но также имеет некоторое смещение по горизонтали. Поэтому требуются дополнительные детали из полиамида (детали 45 и 46 на фиг.8). Деталь 45 в виде пластины из полиамида, которая скреплена с деталью 2 (см. фиг.8). Деталь 46 имеет скругленную форму, эта деталь прикреплена к подвижному штоку 42.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНТАЖА И РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ГИМНАСТИЧЕСКОГО МОСТИКА | 2010 |
|
RU2427404C1 |
| СКАКАЛКА С РЕГУЛИРУЕМОЙ ДЛИНОЙ | 2011 |
|
RU2462284C1 |
| СПОСОБ САМОНАБЛЮДЕНИЯ ЗА СОСТОЯНИЕМ ГЛАЗА | 2010 |
|
RU2433781C1 |
| СПЕЦИАЛЬНАЯ ЗАСЛОНКА ДЛЯ САМОНАБЛЮДЕНИЯ ЗА СОСТОЯНИЕМ ГЛАЗА | 2010 |
|
RU2437614C1 |
| ДАТЧИК ДЛЯ ЗАМЕРА ПОПЕРЕЧНЫХ ПЕРЕМЕЩЕНИЙ ПРИ РАСТЯЖЕНИИ ОБРАЗЦОВ ИЗ ТКАНЕПОДОБНЫХ МАТЕРИАЛОВ | 2024 |
|
RU2823792C1 |
| ДАТЧИК ДЛЯ ЗАМЕРА ПРОДОЛЬНЫХ ПЕРЕМЕЩЕНИЙ ПРИ РАСТЯЖЕНИИ ОБРАЗЦОВ ИЗ ТКАНЕПОДОБНЫХ МАТЕРИАЛОВ | 2024 |
|
RU2824722C1 |
| УСТРОЙСТВО ДЛЯ ЛОВЛИ ГРЫЗУНОВ | 2015 |
|
RU2594857C1 |
| ЛОВУШКА | 2015 |
|
RU2594803C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЖЕСТКОСТИ УПРУГОГО ЭЛЕМЕНТА МАЛОЙ ЖЕСТКОСТИ | 2023 |
|
RU2804600C1 |
| СПОСОБ МОНТАЖА ПОДПОРКИ ДЛЯ ВЕТВЕЙ ПЛОДОВЫХ ДЕРЕВЬЕВ | 2017 |
|
RU2652143C1 |








Изобретение относится к медицине и может быть использовано для поиска биологических активных точек. Между корпусом щупа и подвижным штоком щупа устанавливают упругую опору. Усилие нажатия диагностического щупа регулируют путем изменения жесткости упругой опоры. Применение такой опоры позволяет при соответствующей настройке обеспечить врачу возможность оценки усилия нажатия на щуп не только на основании опыта подобных исследований, но и на основании других ощущений. В частности, после превышения усилием некоторого критического значения небольшое увеличение усилия нажатия на щуп приводит к заметному увеличению перемещения. 12 ил.
Способ монтажа и регулирования усилия нажатия диагностического щупа, включающий установку между подвижным штоком щупа и корпусом щупа упругой опоры, жесткость которой может регулироваться, которая передает усилие, прилагаемое к корпусу щупа, к подвижному штоку щупа, отличающийся тем, что упругую опору выполняют в форме упругой подвески, содержащей неподвижную и подвижную относительно нее опоры, соединенные между собой разнесенными в поперечном направлении проставками и упругим элементом, выполненным по крайней мере в виде одной упругой пластины, установленной под восходящим углом к горизонтали в сторону неподвижной опоры, и направленным от нижней части подвижной опоры к верхней части неподвижной опоры, причем один из концов по крайней мере одной упругой пластины жестко зафиксирован относительно противолежащего конца, который установлен с возможностью фиксированного перемещения по траектории относительно зоны жесткого крепления конца упругой пластины в плоскости ее деформации, при этом проставки выполнены в виде гибких пластин с минимальным удлинением при растяжении, а их концы жестко закреплены на соответствующих неподвижной и подвижной опорах, а подвеска снабжена элементами с минимальным крутящим моментом в плоскости деформации и жесткими в плоскости, перпендикулярной плоскости деформации, симметрично установленными относительно вертикальной плоскости симметрии, закрепленными своими концами с возможностью поворота на неподвижной и подвижной опорах и выполненными в виде штанг, установленных с внешней стороны соответствующей проставки параллельно ей, причем эта упругая опора снабжена дополнительными деталями, предназначенными для обеспечения взаимодействия между упругой опорой, закрепленной на корпусе щупа, и подвижным штоком щупа, причем дополнительные детали включают пластину из полиамида, закрепленную на подвижной опорной площадке упругой опоры, а также дополнительный опорный элемент из полиамида, имеющий скругленную поверхность, например, в форме полушара, причем этот дополнительный и опорный элемент закреплен на подвижном штоке щупа так, что скругленная поверхность взаимодействует с пластиной из полиамида, причем этот дополнительный опорный элемент имеет возможность скользить по пластине из полиамида при осадке упругой опоры под воздействием усилия, приложенного к корпусу щупа, при этом пластина из полиамида и дополнительный опорный элемент из полиамида, имеющий скругленную поверхность, выполняют функцию опорной детали, обеспечивающей взаимодействие упругой опоры с подвижным штоком щупа, а для регулирования усилия нажатия щупа производят фиксированное перемещение конца по крайней мере одной упругой пластины, который установлен с возможностью фиксированного перемещения.
| ДАТЧИК ДЛЯ ОБНАРУЖЕНИЯ ТОЧЕК ИГЛОУКАЛЫВАНИЯ | 0 |
|
SU198503A1 |
| Устройство для диагностики по состоянию биологически активных точек | 1991 |
|
SU1745100A3 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПУНКТУРНОЙ ДИАГНОСТИКИ | 2000 |
|
RU2211689C2 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ | 1991 |
|
RU2020867C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ЗАБОЛЕВАНИЙ И ЭЛЕКТРОТЕРАПИИ | 1992 |
|
RU2017480C1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| EP 0759288 A1, 26.02.1997. | |||

