Область техники, к которой относится изобретение
Изобретение относится к способу изготовления трехмерного объекта согласно преамбуле пункта 1 формулы изобретения.
Патент EP-0758952 В1 раскрывает способ производства трехмерного объекта посредством лазерного спекания, в котором положение, мощность и (или) диаметр лазерного луча измеряют в месте непосредственно выше слоя, который подлежит отверждению, и в котором результат измерения сравнивают с заданными эталонными значениями, и на основе сравнения обнаруживают погрешность или корректируют луч. Предпочтительно, в способе применяют твердотельный лазер.
Уровень техники
Патент EP-1705616 А1 раскрывает способ согласно преамбуле пункта 1 формулы изобретения. Известный способ относится к управлению мощностью лазерного излучения в системе быстрого прототипирования, такой как система стереолитографии или система лазерного спекания. В таких системах быстрого прототипирования объектом является твердеющий слой за слоем при отверждении жидкий строительный материал в случае стереолитографии и отверждаемый порошковый строительный материал в случае лазерного спекания посредством лазерного луча в местах в каждом слое, соответствующих поперечному сечению объекта в слое. В то же самое время, лазерный луч отклоняется системой сканера таким образом, что луч направляется вдоль линий, таких как векторы по слою. Оптимальное экспонирование желательно для каждой зоны объекта, который будет произведен, которое может быть равным для всех зон или различным от зоны к зоне. В известном способе мощность лазерного луча измеряют посредством прибора измерения энергии и, после этого, мощность лазерного излучения регулируют таким образом, что достигают желательной мощности и глубины экспонирования.
В особенности, в газовых лазерах, таких как CO2-лазеры, имеется проблема в том, что девиации мощности лазера для коротких и длительных периодов сильно зависят от предыдущих условий квантомеханической генерации, которые непрерывно изменяются. Простое управление замкнутой системой, как выполнено в EP-1705616 А1, является, однако, не пригодным, чтобы достигнуть устойчивой мощности лазера в течение длительного периода.
Целью изобретения является обеспечить способ изготовления трехмерного объекта посредством быстрого прототипирования, в котором применяют газовый лазер, такой как CO2-лазер, и в котором могут быть устранены девиации мощности лазера для коротких и длительных периодов так, что качество первого произведенного объекта улучшается.
Эту цель достигают способом по пункту 1 формулы изобретения. Дальнейшие развития изобретения указаны в зависимых пунктах.
В частности, способ имеет преимущество в том, что входной управляющий сигнал лазера может быть отрегулирован автоматической оценкой мощности лазера в очень короткой задержке, и что можно избежать эффектов при включении за счет определенных линейных изменений при включении. Таким образом, девиации мощности лазера в интервале 10 мкс можно компенсировать.
Дальнейшие особенности и преимущества изобретения указаны в описании варианта конструкции на основе фигур.
Краткое описание чертежей
Фиг.1 представляет собой схематический вид устройства лазерного спекания;
Фиг.2 представляет собой график измеренной мощности от времени с пилообразными изменениями при включении и без них в дорожке, экспонированной лазерным лучом в слое;
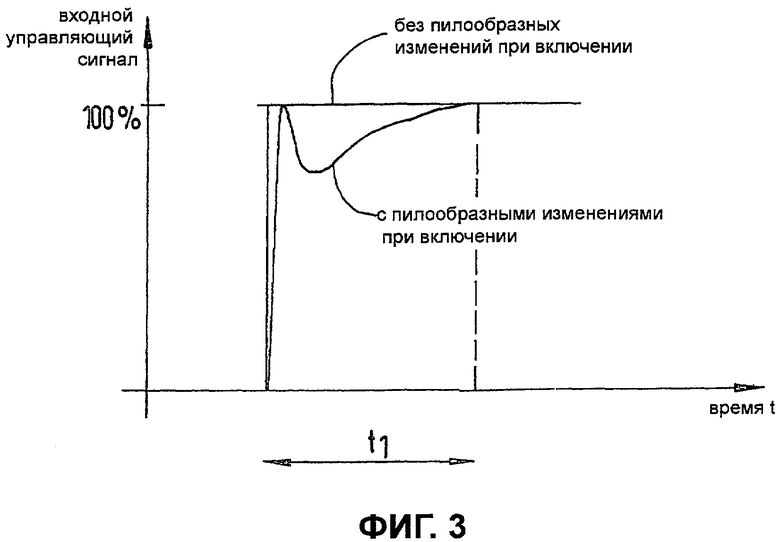
Фиг.3 представляет собой схематическую кривую входного управляющего сигнала для лазера; и
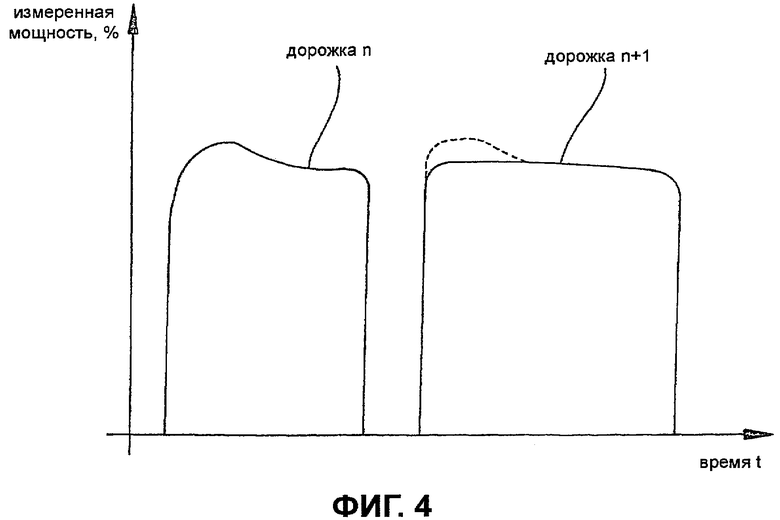
Фиг.4 представляет собой схематический вид измеренной мощности для двух последовательных дорожек.
Осуществление изобретения
Далее, устройство лазерного спекания, имеющее регулирование лазера по изобретению, описано с отсылкой к Фиг.1.
Устройство включает емкость 1 для наращивания слоев, в которой выполнена платформа 2 для поддержки объекта 3. Платформа 2 выполнена с возможностью перемещения в вертикальном направлении в пределах емкости 1 для наращивания слоев, причем высота регулируется устройством 4. Плоскость, в которой отверждается наносимый порошковый строительный материал, образует рабочую поверхность 5. Для отверждения порошкового материала в пределах рабочей поверхности 5 обеспечивают лазер 6, который можно сформировать как газовый лазер, такой как CO2-лазер. Лазер 6 генерирует лазерный луч 7, который фокусируется отклоняющим устройством 8, например, в форме одного или более зеркал отклонения, вращаемых узлом вращения (не показан), и фокусирующим узлом 9 на рабочую поверхность 5. Предусмотрен блок 10 управления для управления отклоняющим устройством 8 и, в случае необходимости, фокусирующим узлом 9 таким, что лазерный луч 7 может быть отклонен к любому месту в рабочей поверхности 5.
Далее, предусмотрено устройство 11 подачи для подачи порошкового строительного материала для последующего слоя. Посредством распределителя 12 строительный материал наносится и приглаживается на рабочей поверхности 5.
Часть 7′ лазерного луча 7 на пути лазерного луча присоединяется посредством частично прозрачного зеркала 13 внутри лазера или снаружи, как показано на Фиг.1. Частично прозрачное зеркало 13 сформировано так, чтобы присоединять меньше, чем приблизительно 1% мощности. В описанном варианте конструкции частично прозрачное зеркало 13 устроено в траектории пучка перед отклоняющим устройством 8. Неприсоединенный луч 7′ входит в сенсор 14 для измерения мощности. Датчик 14 предпочтительно сформирован как тонкопленочный датчик ALTP (atom layer thermopile) (термоэлементный датчик). Датчик имеет короткую задержку отклика, приблизительно 10 мкс. Таким образом, разрешение единственного импульса лазера возможно. В частности, датчик сформирован, чтобы дать возможность регистрации свойств лазера при включении одновременно с нормальной работой по наращиванию слоев.
Во время работы платформа 2 снижается по мере накопления слоев, наносится новый порошковый слой и отверждается лазерным лучом 7 в местах в каждом слое в рабочей поверхности 5, соответствующей объекту. В то же самое время, отклоняющее устройство 8 управляется таким образом, что лазерный луч 7 направляется вдоль дорожек выше рабочей поверхности 5. Например, известной моделью экспонирования является экспонирование множества параллельных дорожек рядом. Обычно, лазер выключается в конце дорожки, и лазер включается в начале новой дорожки.
Фиг.2 показывает зависимость мощности лазера от времени для одной дорожки, которая измеряется датчиком 14. Кривая 1 показывает измеренную мощность лазера, когда управление согласно изобретению не выполняется. В этом случае, включение лазера приводит к пику 1a, как ясно видимому в левой части кривой, которое означает, что мощность слишком высока в начале дорожки. Это приводит к неточностям в наращивании слоев объекта, если все или большинство дорожек показывают такую энергетическую девиацию, то отверждение не происходит равномерно вдоль дорожки.
В способе по предпочтительному варианту конструкции мощность лазера измеряют датчиком 14 в пределах интервала времени в реальном времени, соответствующем операции включения, включающей пик. Этот интервал времени показан на Фиг.2 как Δt1.
Пилообразное изменение при включении для входного управляющего сигнала лазера определяют из величин измеренной мощности, в котором пилообразное изменение при включении указывает на зависимость входного сигнала управления от времени для операции включения Δt1, и в котором пилообразное изменение при включении выбирают так, чтобы компенсировать пик 1a на кривой 1, как показано на Фиг.2. Кривая 2, показанная на Фиг.2, представляет измеренную мощность в том случае, когда входной управляющий сигнал изменяется согласно выбранному пилообразному изменению при включении в операции включения.
Фиг.3 схематично показывает зависимость значения входного управляющего сигнала от времени. Когда применяют пилообразное изменение при включении, входной управляющий сигнал резко изменяется от нуля до предопределенного значения. Это приводит к пику, как показано на Фиг.2. При помощи пилообразного изменения при включении значение входного управляющего сигнала увеличивается согласно предопределенной функции. Фиг.3 показывает преимущественную форму этой функции, имеющей запускающий импульс, за которым следует временное ослабление управляющего сигнала, таким образом, быстро достигается целевая мощность лазера, в то время как пик согласно Фиг.2 будет предотвращен в то же самое время.
Пилообразное изменение при включении указывает на зависимость мощности управления от времени. Это пилообразное изменение является функцией нескольких параметров и особенно зависит от желательной мощности лазера, перерыва перед включением лазера, так же как от накопленных предыдущих условий включения. Например, пилообразное изменение может быть эмпирически определено, и параметры могут быть зарегистрированы в таблице, или функция, подлежащая расчету, может быть определена.
Как показано на Фиг.4, множество дорожек следуют друг за другом, например, дорожка n и дорожка n+1, которые проложены в слое лазером. Пилообразное изменение при включении, определенное измерением в реальном времени мощности лазера во время операции включения на дорожку n для того, чтобы удалить пик, уже принимают во внимание для следующей дорожки n+1. Мощность, которую измеряют в дорожке n+1 во время операции включения, может, в свою очередь, использоваться для коррекции пилообразного изменения для последующей дорожки. Таким образом, способ является итерационным.
С помощью раскрытого способа девиации мощности лазера могут быть скомпенсированы до интервала времени разрешения датчика 14, а именно, до интервала приблизительно 10 мкс. Таким образом, стабилизация мощности лазера выполняется в течение длительного периода, так как стабилизация не зависит больше от истории квантомеханической генерации, которая непрерывно изменяется.
В модифицированном варианте конструкции операция лазера контролируется датчиком в течение длительного периода времени без стабилизации, и на основе кривых измеренной мощности выполняется классификация определенных режимов операции или определенных моделей экспонирования и соответствующие пилообразные изменения при включении рассчитывают из этого. Затем управление мощностью лазера адаптируют к соответствующим лазерам на основе предопределенных пилообразных изменений при включении вышеописанным итеративным процессом.
Далее, возможно сделать запись мощности лазера и распределить мощность лазера по используемым дорожкам для зарегистрированного интервала времени.
В дальнейшей модификации поведение при включении может быть адаптировано к поведению ускорения в пределах дорожки, подлежащей экспонированию.
Изобретение не ограничивается вышеописанным вариантом конструкции. Изобретение может использоваться для всех быстрых методов прототипирования, использующих газовый лазер.
Далее, изобретение не ограничивается управлением мощностью лазера на основе поведения при включении, но все операции могут быть измерены и управляемы, в которых мощность лазера изменяется, такие как операция включения и операции, включающие изменения от малой мощности лазера к большой мощности лазера и наоборот.

Способ изготовления трехмерного объекта по изобретению, в котором объектом является отверждаемый слой за слоем строительный материал, полученный отверждением, посредством луча газового лазера в местах в каждом слое, соответствующем поперечному сечению объекта. В способе мощность лазера измеряют и мощностью лазера управляют согласно измеренному значению. При этом измерение мощности осуществляют в интервале времени, в котором происходит изменение мощности, а входным управляющим сигналом лазера управляют согласно измеренным значениям. Технический результат, достигаемый при использовании способа по изобретению, заключается в том, чтобы обеспечить способ изготовления трехмерного объекта посредством быстрого прототипирования и для устранения девиации мощности лазера для коротких и длинных периодов и улучшения качества произведенного объекта. 15 з.п. ф-лы, 4 ил.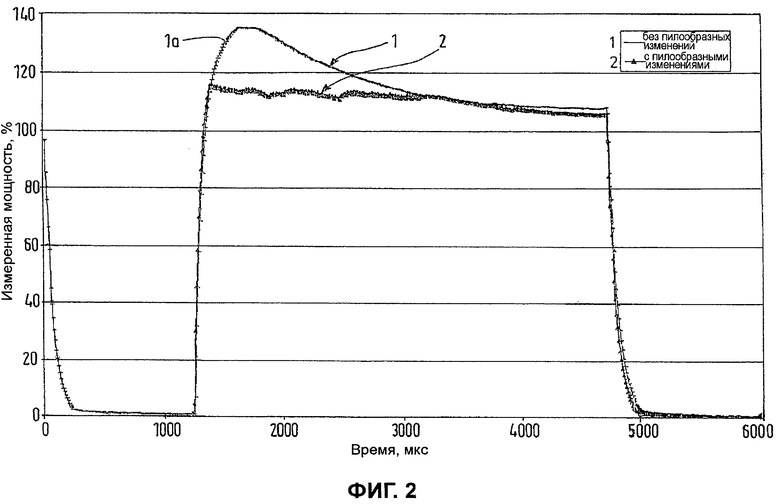
1. Способ изготовления трехмерного объекта, в котором объектом является отверждаемый слой за слоем строительный материал, полученный отверждением посредством луча газового лазера в местах в слое, соответствующем поперечному сечению объекта, в котором мощность лазера измеряют и мощность лазера регулируют согласно измеренному значению, отличающийся тем, что измерение мощности осуществляют в интервале времени, в котором происходит изменение мощности, а входным управляющим сигналом лазера управляют согласно измеренному значению.
2. Способ по п.1, в котором изменение мощности происходит резко.
3. Способ по п.1, в котором изменением мощности является операция включения, операция выключения или переключение между двумя значениями мощности.
4. Способ по п.1, в котором лазерный луч направляют на дорожках выше слоя, причем у каждой дорожки есть начало, при этом лазер включают в начале дорожки, а измерение мощности проводят при операции включения.
5. Способ по п.1, в котором в соответствии с измеренными значениями определяют линейное изменение, а входной управляющий сигнал лазера изменяют при операции включения согласно линейному изменению.
6. Способ по любому из пп.1-4, в котором лазерный луч направляют на дорожках выше слоя, дорожка имеет начало и конец, причем лазер включают в начале дорожки и выключают в конце дорожки, при этом входные управляющие сигналы лазера более поздней дорожки зависят от измеренных значений мощности во время операции включения более ранней дорожки.
7. Способ но п.5, в котором лазерный луч направляют на дорожках выше слоя, дорожка имеет начало и конец, причем лазер включают в начале дорожки и выключают в конце дорожки, при этом входные управляющие сигналы лазера более поздней дорожки зависят от измеренных значений мощности во время операции включения более ранней дорожки.
8. Способ по п.6, в котором управление выполняют итеративно.
9. Способ по п.7, в котором управление выполняют итеративно.
10. Способ по любому из пп.1-4, в котором лазером является CO2-лазер.
11. Способ по любому из пп.1-4, в котором датчик применяют в качестве средства измерения мощности, которое имеет задержку отклика приблизительно 10 мкс или меньше.
12. Способ по п.5, в котором датчик применяют в качестве средства измерения мощности, которое имеет задержку отклика приблизительно 10 мкс или меньше.
13. Способ по п.6, в котором датчик применяют в качестве средства измерения мощности, которое имеет задержку отклика приблизительно 10 мкс или меньше.
14. Способ по п.7, в котором датчик применяют в качестве средства измерения мощности, которое имеет задержку отклика приблизительно 10 мкс или меньше.
15. Способ по п.8, в котором датчик применяют в качестве средства измерения мощности, которое имеет задержку отклика приблизительно 10 мкс или меньше.
16. Способ по п.9, в котором датчик применяют в качестве средства измерения мощности, которое имеет задержку отклика приблизительно 10 мкс или меньше.
| Способ получения низкочастотных колебаний гидравлическим излучателем и гидравлический излучатель | 1988 |
|
SU1705616A1 |
| US 6085122 A, 04.07.2000 | |||
| Устройство для сортировки сыпучего материала | 1982 |
|
SU1033229A1 |
| Устройство для регулирования длины прокладываемой уточной нити | 1985 |
|
SU1270184A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ОБЪЁМНЫХ ИЗДЕЛИЙ ИЗ ПОРОШКОВЫХ КОМПОЗИЦИЙ | 2000 |
|
RU2217265C2 |

