Настоящее изобретение относится к способу монтажа стального каркаса постройки, при этом каркас содержит, по меньшей мере, горизонтальные балки и вертикальные опоры.
Настоящее изобретение также относится к устройству для осуществления способа.
Стальной каркас построек представляет собой конструкцию, главным образом, состоящую из вертикальных поддерживающих опор и горизонтальных несущих балок. Дополнительно, используются решетчатые конструкции, имеющие различные типы диагональных растяжек, треугольные структуры и подобные. Решетчатые конструкции часто изготавливаются заранее в установочные модули в производственном цехе. Задание размеров и конструкции каркаса проектируются отдельно для каждого случая. Каркас может быть, например, частью несущей каркасной конструкции постройки и выполнять функцию соединительной конструкции, например, вместе с железобетонными конструкциями. Каркас также может выполнять функцию самостоятельной несущей конструкции. Преимущества стального каркаса, среди прочих, заключаются в быстрой сборке, в точно заданных размерами частях, благодаря которым они могут быть легко прикреплены друг к другу, и в хорошей несущей способности по отношению к размерам и массе каркаса. Гибкость конструирования стального каркаса показана в тонких и низких конструкциях и в простоте соединений. Стальной каркас делает возможным достичь хорошей точности размеров для, например, частей, имеющих отношение к фасаду зданий.
На строительной площадке, стальные каркасы транспортируются и перемещаются посредством одних и тех же подъемных и транспортирующих устройств, как и другие составные части, то есть либо неподвижными подъемными кранами, либо подвижными транспортирующими подъемными кранами, оба из которых поднимают груз посредством грузоподъемного крюка или других транспортирующих средств, подвешенных посредством тросов, и груз висит свободно от концов тросов. Во время такого подъема груз может свободно качаться в стороны, и опоры или балки должны быть направлены точно на их места посредством руки. Таким образом, установка частей требует в добавление к крановщику, по меньшей мере, одного монтажника для направления балки или опоры и для выполнения необходимого крепления. Самыми распространенными способами крепления конструкций являются сварка и различные болтовые соединения. Каркас собран из отдельных перекрытий, и подъемный кран используется для перемещения опор и балок в их соответствующие места. Винтовые крепления могут быть без труда установлены на их места, и сварные соединения также могут быть предварительно установлены для окончательного закрепления сваркой, и болты затягиваются, и окончательная сварка выполняется в свое время, после того, как части подняты на место. Однако независимо от этапа, в котором выполняется окончательное крепление, установочная работа каркаса требует огромного труда, так как опоры и балки должны направляться в свои места посредством руки. Точность подъемного крана со свободно подвешенным, управляемым тросом, не является достаточной для размещения частей без ручного труда.
Задачей изобретения является создание нового типа способа и устройства для монтажа стального каркаса постройки, предпочтительно для монтажа стального каркаса, содержащего вертикальные опоры и горизонтальные балки.
Изобретение в некоторых случаях также может применяться для сборки заранее изготовленных решетчатых конструкций.
Изобретение основывается на перемещении частей каркаса посредством захватывающего устройства, расположенного подвешенным с помощью жесткой системы стрелы, при этом захватывающее устройство имеет, по меньшей мере, две степени свободы по отношению к концу стрелы.
В соответствии с одним вариантом осуществления изобретения захватывающее устройство может поворачиваться, по меньшей мере, вокруг вертикальной оси и вращаться вокруг горизонтальной оси.
В соответствии с одним предпочтительным вариантом осуществления захватывающее устройство представляет собой рабочую головку лесозаготовительной машины, обеспеченную с захватывающими средствами.
В соответствии с одним вариантом осуществления система стрелы представляет собой систему стрелы экскаватора или лесозаготовительной машины.
В соответствии с другим вариантом осуществления в устройстве располагается точка позиционирования, посредством которой расположение захватывающего устройства и части, прикрепленной к нему, может быть просчитано посредством системы позиционирования.
Более того, в соответствии с одним вариантом осуществления изобретения, по меньшей мере, одно из следующих исполнительных устройств прикрепляется к захватывающему устройству: сварочная головка, система позиционирования, ультразвуковая контрольная аппаратура и камера.
Более того, в соответствии с одним предпочтительным вариантом осуществления устройство обеспечивается с автопилотом, посредством которого части могут автоматически транспортироваться на место, например, упорядоченные посредством дистанционного управления.
Изобретение определено более подробно в формуле изобретения.
Существенные преимущества достигаются посредством вариантов осуществлений изобретения.
Посредством изобретения сборка каркаса является более быстрой и менее трудоемкой по сравнению с предшествующими способами установки. Размещение каждой опоры, балки или заранее изготовленной части может входить в систему управления устройства, начиная от строительных чертежей, посредством чего части автоматически правильно размещаются. Система может включать в себя системный журнал, посредством которого является возможным контролировать точную последовательность установки и установку частей в соответствующие позиции. Если захватывающее устройство обеспечено, например, с автоматической сваркой, монтаж каркаса может быть выполнен очень быстро и эффективно. Более того, автоматическое управление стыками делает возможным создание архивного файла для изделия, имеющего точную информацию о каркасной конструкции для контролирования конструирования и для всей эксплуатационной долговечности постройки. Таким образом, легко обеспечить, чтобы каркас был смонтирован в соответствии со строительным чертежом и нормативами. Незначительно измененная лесозаготовительная машина может использоваться в качестве транспортирующего устройства, с демонтированными режущими и разветвляющимися средствами, и обеспеченная подходящим захватывающим устройством для крепления опор и балок, и с другими вспомогательными приспособлениями, подпадающими под объем изобретения.
Изобретение также может применяться в сочетании с традиционным однобалочным подъемным краном с решетчатой каркасной конструкцией, если вертикальная балка прикрепляется к каретке поперечной балки, и вертикальная балка обеспечивается либо непосредственно, либо через посредство шарнирно-сочлененной балки с захватывающим устройством, имеющим, по меньшей мере, две степени свободы. Таким образом, легко достичь относительно широкого рабочего пространства.
Также является возможным применять изобретение таким образом, чтобы оно использовалось только для установки опор или балок. Особенно, когда захватывающее устройство основано на лесозаготовительной машине, оно может транспортировать необходимые опоры и балки, так как многие лесозаготовительные машины явно имеют загрузочное отделение.
Ниже изобретение рассматривается посредством примеров и ссылок на прилагаемые чертежи.
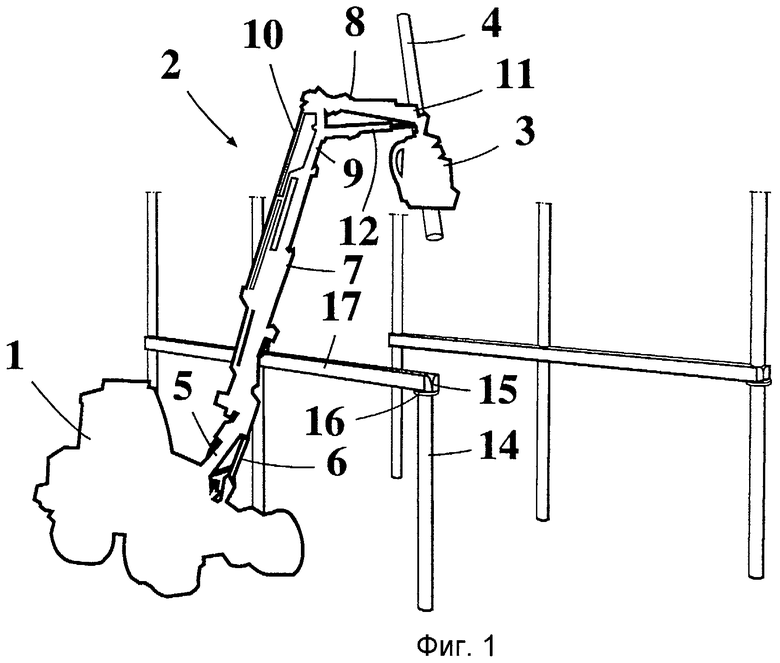
На фиг.1 показано одно устройство, в соответствии с изобретением.
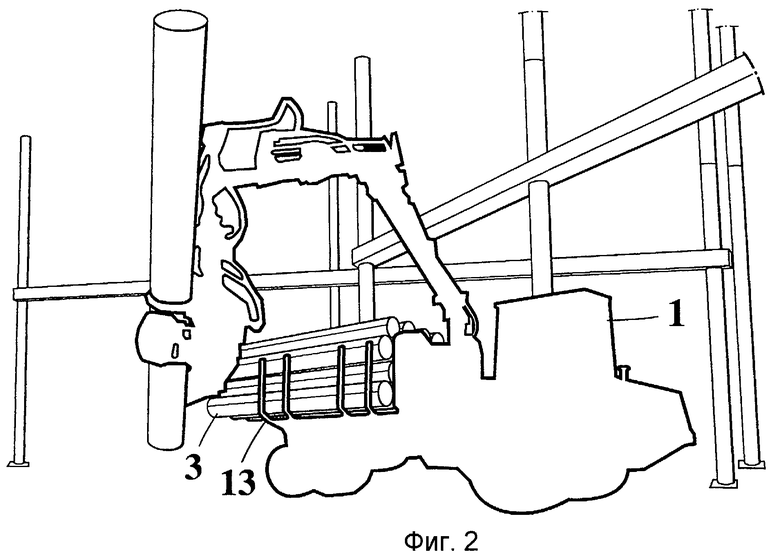
На фиг.2 показано другое устройство, в соответствии с изобретением.
Устройство, показанное на фиг.1, содержит традиционный, общеизвестный трактор 1 и транспортирующую балочную систему 2, прикрепленную к нему. Конец балочной системы 2 выполнен с захватывающим устройством 3 для захватывания опор 4. В этом примере система 2 стрелы содержит первую часть 5 стрелы, прикрепленную к трактору 1, при этом первая часть стрелы присоединяет систему 2 стрелы к трактору, предпочтительно, посредством шарнирного соединения, вокруг оси которого первая часть 5 стрелы и вся система 2 стрелы, прикрепленная к ней, может поворачиваться вокруг вертикальной оси шарнирного соединения. Органом управления шарнира может быть пара гидравлических цилиндров, гидродвигатель или другой подходящий исполнительный механизм. Вторая часть 7 системы 2 стрелы представляет собой выдвижную стрелу с переменной длиной. Угол второй части стрелы, по отношению к горизонтальному уровню, может вертикально изменяться посредством гидравлического цилиндра 6. Третья часть 8 стрелы размещена на конце второй части стрелы, прикрепленной к концу второй части 7 стрелы посредством шарнирного соединения 10. Третья часть 8 стрелы может поворачиваться вокруг шарнирного соединения 9 посредством гидравлического цилиндра 10. Конец третьей части 8 стрелы обеспечен захватывающим устройством 3, прикрепленным посредством шарнирного соединения 11, при этом захватывающее устройство обладает способностью поворачиваться вокруг шарнирного соединения 11 в направлении продольной оси третьей части 8 стрелы посредством гидравлического цилиндра 12. Захватывающее устройство 3 также содержит исполнительные механизмы для поворачивания захватывающих средств захватывающего устройства 3 вокруг горизонтальной оси.
Расположения стрелы, описанные выше, являются хорошо известными, например, в экскаваторах и лесозаготовительных машинах, и специалист в данной области может посредством этих известных устройств осуществить для определенных условий систему стрелы, имеющую достаточный вылет стрелы и грузоподъемность. Система 2 стрелы предназначена для перемещения захватывающего устройства 3 в трехмерной окружающей обстановке до конкретной точки, и эта функция может быть выполнена посредством многих типов систем стрелы. Захватывающее устройство предназначено для того, чтобы первому делать попытку и захватывать опору 4 (см. фиг.1) или балку. С другой стороны, оно предназначено для позиционирования конца опоры в точно соответствующее место посредством вращательных перемещений вокруг горизонтальной и вертикальной плоскости захватывающего устройства. Захватывающее устройство также обеспечивает, чтобы расположение опоры или балки было соответствующим. В примере на фиг.1 опоры 3 располагаются горизонтально, а балки располагаются вертикально. Строительные нормативы и правила для стальных конструкций включают в себя допуски, например, для наибольшего допустимого угла наклона опор. Для того чтобы регулировать это, является предпочтительным обеспечить захватывающее устройство с датчиками, посредством которых может регулироваться угол наклона, и опоры могут устанавливаться вертикально.
Главное отличие устройства на фиг.2, относительно устройства, показанного на фиг.1, заключается в том, что здесь опоры 3 транспортируются в загрузочное отделение, установленное на монтажном устройстве, посредством чего они могут быть легко захвачены. Машина также может транспортировать другие части, необходимые для установки, и она может быть сооружена таким образом, чтобы она могла подниматься от одного уровня постройки к другому уровню. Поднимание может быть выполнено посредством продвижения вдоль платформ или посредством, например, гидравлических подъемных опор.
Посредством вышеописанных устройств стальной каркас монтируется как изложено ниже.
Захватывающее устройство 3 монтажного устройства поднимает опору 4 посредством ее захватывания рядом с ее нижним концом, то есть конец, размещенный ниже, при установке в каркас. Опора переворачивается в вертикальное положение посредством перемещений системы 18 стрелы и захватывающего устройства 3, и она перемещается в ее установочное место, в этом случае, по направлению к верхнему концу уже смонтированной опоры 14. Новая опора 4 переворачивается в вертикальное положение и перемещается по направлению к верхней части 15 смонтированной опоры и опускается для того, чтобы поддерживаться посредством опоры. В этом примере верхние концы 15 опор выполнены с конусами 15, таким образом, нижний конец новой опоры, направляемый посредством конуса, легко размещается на верхней части смонтированной опоры. Нижний конец конуса обеспечен фланцем 16, на который опускается нижний конец новой опоры 4 и на который также опирается балка 17. Балка 17 обеспечена вырезом для концов 4, 14 опор. Когда опора позиционируется в свое соответствующее место, она может быть закреплена. Любое подходящее соединение может быть использовано для закрепления, но если захватывающее устройство 3 обеспечено с автоматическим сварочным устройством, сварка является очень предпочтительным способом соединения, посредством чего соединение будет сразу готово. Каркас может быть смонтирован посредством установки сначала первого ряда опор и затем позиционирования на него поперечных балок, после чего устанавливается другой ряд опор и следующих балок. С другой стороны, балки могут быть установлены посредством подъемного крана строительной площадки, а также посредством их ручного направления, посредством чего является возможным одновременно устанавливать новые опоры и непосредственно после этого балки на образованные установочные места.
Опоры и балки могут направляться на места некоторым количеством способов. Наиболее простой способ заключается в управлении устройством, начиная с кабины устанавливающего устройства, и оператор машины направляет опору на ее место. В этом случае вспомогательное устройство является, по всей вероятности, необходимым для контролирования позиционирования части в соответствующее место. Вспомогательное устройство может быть заменено камерой, размещенной на захватывающем устройстве или в подходящем месте на стреле таким образом, чтобы оператор мог видеть установочное месторасположение. Другой способ заключается в размещении самонаведения на основе точек нивелирования строительной площадки. В этом случае в устанавливающем устройстве необходима система позиционирования, посредством которой положение захватывающего устройства и опоры или балки, прикрепленной к ней, может быть определено. Один способ выполнения этого заключается в размещении контрольной точки на устройстве, при этом точка располагается относительно точек нивелирования строительной площадки. Таким образом, система управления устройством просчитывает положение захватывающего устройства и конца опоры на основе этой точки, и опора направляется в ее заданную точку либо автоматически, либо с помощью оператора, используя дисплейный экран. Недостаток этого расположения заключается в погрешности между просчитанным положением и действительным положением, вызванной какими-либо перемещениями и погрешностями в перемещении системы стрелы. Большая точность достигается при расположении контрольной точки непосредственно на захватывающем устройстве, и ее положение относительно точек нивелирования определяется посредством, например, лазерного измерения. Это обеспечивает возможность точного определения положения захватывающего устройства, и гибкость стрелы или другие погрешности перемещения не оказывают воздействие на позиционирование. Возможно этот способ позиционирования может обеспечить возможность автоматической установки опоры, при этом оператор устройства только задает команды устройству для транспортирования следующей опоры на ее место. Когда это сочетается с автоматической сваркой, автоматической стыковкой и контролем качества, достигается очень эффективная система монтажа каркаса, и качество изготовления целого каркаса может легко контролироваться.
Существенная особенность изобретения заключается в том, что захватывающее устройство перемещается посредством жесткой системы стрелы. Это означает, что захватывающее устройство и часть, прикрепленная к нему, постоянно поддерживаются во время перемещения и установки. Таким образом, в транспортирующем устройстве не должны присутствовать гибкие поддерживающие элементы или свободно поворачивающиеся шарнирные соединения. В добавление к вышеописанной системе стрелы, некто может рассматривать установку жесткой вертикальной стрелы на каретку поперечной балки подъемного крана строительной площадки, конец которого обеспечен с системой стрелы, обеспечивающей достаточное пространство перемещения, описанного выше. Конец жесткой вертикальной балки также может быть обеспечен только с захватывающим устройством, чтобы он мог быть направлен в вертикальное направление посредством направляющих, расположенных на вертикальной балке. Шарнирно-сочлененная балочная система также может быть прикреплена к направляющей или направляющим. Преимущество этого расположения заключается в широком пространстве перемещения, достигнутого посредством подъемного крана строительной площадки, но его недостаток, при больших подъемных кранах, заключается в необходимости высокой, жесткой, вертикальной балки. Вероятно вертикальная стрела также должна укорачиваться, поскольку каркас постройки монтируется таким образом, чтобы она имела пространство поворачиваться вокруг смонтированного каркаса.
Если каркас постройки содержит решетчатые конструкции или тому подобное, для них должна быть определена точка захвата, предназначенная для захвата захватывающим устройством. Затем может быть просчитано месторасположение неполной конструкции на основе этой точки или составная часть конструкции может быть направлена на место посредством визуального самонаведения или может быть направлена посредством вспомогательного устройства.
Изобретение относится к строительству, в частности к способу монтажа стального каркаса постройки. Технический результат заключается в повышении точности установки элементов каркаса. Каркас содержит горизонтальные балки и вертикальные опоры. Части каркаса устанавливают на место посредством, по меньшей мере, одного подъемного устройства, при этом, по меньшей мере, одну из опор каркаса устанавливают на место посредством жесткой системы стрелы с помощью ее перемещения вместе с захватывающим устройством, прикрепленным к системе стрелы. Опора переворачивается в соответствующее установочное положение посредством поворачивания захватывающих средств захватывающего устройства вокруг, по меньшей мере, двух осей вращения. Предпочтительно, подъемное устройство основано на лесозаготовительной машине и оно может транспортировать, вместе с ней, материалы, необходимые для изготовления и сборки каркаса. 2 н. и 12 з.п. ф-лы, 2 ил.
1. Способ монтажа стального каркаса постройки, при этом каркас содержит, по меньшей мере, горизонтальные балки (17) и вертикальные опоры (4, 14), в котором части каркаса (1, 14, 17) устанавливают на место посредством, по меньшей мере, одного подъемного устройства, отличающийся тем, что, по меньшей мере, одну из опор (14) каркаса устанавливают на место посредством жесткой системы (2) стрелы путем ее перемещения вместе с захватывающим устройством (3), прикрепленным к системе (2) стрелы, и переворачивают в соответствующее установочное положение посредством поворота захватывающих средств захватывающего устройства (3) вокруг, по меньшей мере, двух осей вращения.
2. Способ по п.1, отличающийся тем, что захватывающее устройство (3) поворачивают вокруг, по меньшей мере, вертикальной оси и горизонтальной оси.
3. Способ по п.1 или 2, отличающейся тем, что рабочую головку лесозаготовительной машины, выполненную с захватывающими средствами, используют в качестве захватывающего устройства (3).
4. Способ по п.1, отличающийся тем, что в качестве системы (2) стрелы используют систему стрелы экскаватора или лесозаготовительной машины.
5. Способ по п.1, отличающийся тем, что точка позиционирования образована на устройстве, на основе которой положение захватывающего устройства (3) и части стального каркаса, прикрепленной к нему, просчитывают посредством системы позиционирования.
6. Способ по п.1, отличающийся тем, что, по меньшей мере, одну из следующих операций выполняют посредством исполнительного механизма, прикрепленного к захватывающему устройству: сварка, позиционирование, ультразвуковой контроль и запись посредством камеры.
7. Способ по п.5, отличающийся тем, что позиционирование, по меньшей мере, одной опоры (4) регулируют с помощью автоматического управления, посредством которого части (4, 14, 17) могут автоматически перемещаться на место, например, упорядоченные с помощью дистанционного управления.
8. Устройство для монтажа стального каркаса постройки, при этом каркас содержит, по меньшей мере, горизонтальные балки (17) и вертикальные опоры (4, 14), при этом установка содержит, по меньшей мере, одно подъемное устройство, посредством которого части (1, 14, 17) каркаса размещены на своих местах, отличающееся тем, что подъемное устройство содержит жесткую систему (2) стрелы и захватывающее устройство (3), прикрепленное к системе стрелы для захватывания, по меньшей мере, одной опоры (4) и для переворачивания ее в соответствующее установочное положение, при этом захватывающее устройство (3) имеет, по меньшей мере, две степени свободы для поворачивания захватывающих средств захватывающего устройства (3) вокруг, по меньшей мере, двух осей вращения.
9. Устройство по п.8, отличающееся тем, что оси вращения захватывающего устройства (3) представляют собой вертикальную ось и горизонтальную ось.
10. Устройство по п.8 или 9, отличающееся тем, что захватывающее устройство (3) представляет собой рабочую головку лесозаготовительной машины, снабженную захватывающими средствами.
11. Устройство по п.8, отличающееся тем, что система (2) стрелы представляет собой систему стрелы экскаватора или лесозаготовительной машины.
12. Устройство по п.8, отличающееся тем, что точка позиционирования расположена на устройстве, на основе которой положение захватывающего устройства (3) и части (4) стального каркаса, прикрепленной к нему, может быть просчитано посредством системы позиционирования.
13. Устройство по п.8, отличающееся тем, что, по меньшей мере, одна из функций следующих устройств выполняется посредством исполнительного механизма, прикрепленного к захватывающему устройству: сварочная головка, система позиционирования, ультразвуковая контрольная аппаратура и камера.
14. Устройство по п.12, отличающееся тем, что устройство выполнено с автоматическим управлением, посредством которого части (4, 14, 17) автоматически перемещаются на место, например, упорядоченные с помощью дистанционного управления.
| NL 1022386 С2, 19.03.2003 | |||
| JP 9194183 А, 29.07.1997 | |||
| US 6280119 В1, 28.08.2001 | |||
| US 2005135915 А1, 23.06.2005 | |||
| US 2003036817 A1, 20.02.2003 | |||
| Самоподъемный кран | 1988 |
|
SU1558858A1 |

