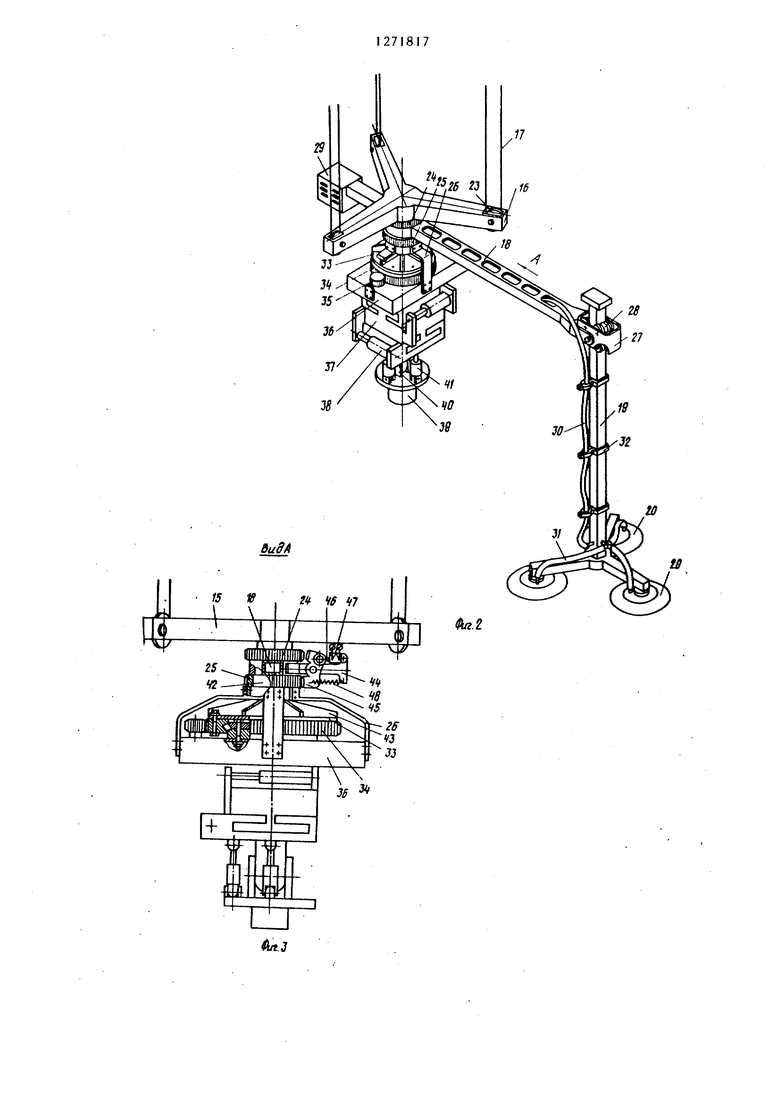
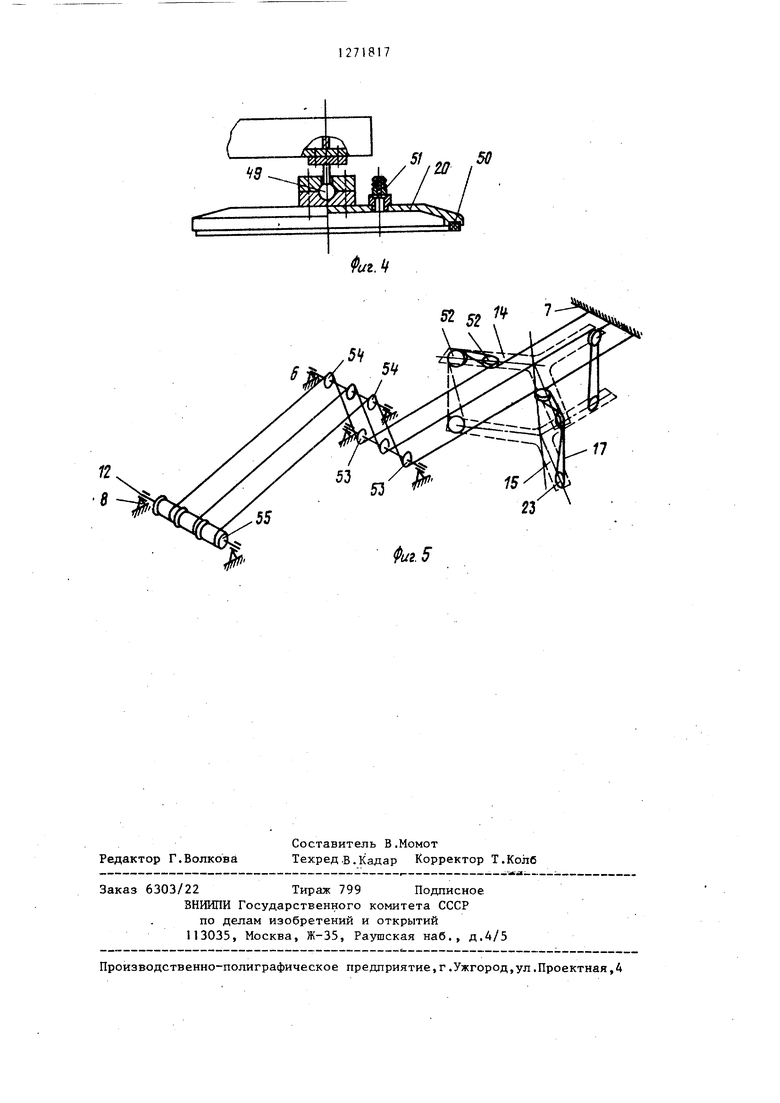
оо Изобретение относится к подъемно-транспортным машинам преимущественно для монтажа зданий из с орного железобетона. Цель изобретения - повьппение точ ности позиционирования крана-манипулятора. На фиг. 1 представлен кран-манглпулятор, вид сбоку; на фиг. 2 - ра.бочий орган в аксонометрии, общий вид; на фиг.З - вид А на фиг.2; на фиг.4 - крепление вакуумной камеры; на фиг.5 - запасовка канатов подъем ной пространственной подвески рабочего органа. Кран-манипулятор (фиг.1) состоит из ходовой,платформы 1 с ходовыми тешежками 2, перемещаюищмися по рел совым путям. На платформе 1 установ лены балласт 3 и башня 4. В верхней части башни 4 смонтированы механизм 5 поворота и оголовок 6, к которому стрела 7 и консоль 8 шарнирно прикреплены соответственно оттяжками 9 и 10. На консоли 8 расположены про тивовес 11, грузовая лебедка 12 и ле бедка 13 перемещения грузовой тележки 14, расположенной на стреле 7. . Корпус 15 рабочего органа 16 свйзан с грузовой тележкой 14 подъемной про странственной канатной подвеской 17 Рабочий орган 16 содержит монтажную опору, состоящую из горизонтальной балки 18 и стойки 19 с вакуумными ка мерами 20, быстросменный схват 21 и механизм его перемещения в пространстве (не показаны). Количество вакуумных камер должно быть не менее трех для обеспечения устойчивого положения стойки 19. Функциональное назначение схвата 21 - жесткий груза 22, представляющего собой сборную конструкцию монтируемого здания. На корпусе 15 рабочего органа 16 установлены блоки 23 подвески 17.Под корпусом 15 установлены соосно жестко связанные с ним храповое колесо 24 и поворотное вокруг вертикали храповое колесо 25, связанное с поворотной частью рабочего органа 16 связями 26. Между колесами 24 и 25 расположена горизонтальная балка 18 несущая на конце шарнирно закреплен ную роликовую обойму 27 с роликами 28. Внутри обоймы 27 размещена вертикально подвижная стойка 19, на ниж нем конце которой закреплены радиал 7 но разнесенные в плане вakyyмныe камеры 20. Стойка 19 дополнительно играет роль ресивера вакуумной системы. На противоположном от стойки 19 конце балки 18 размещен шкаф 29 с вакуумным насосом, приборами контроля и управления вакуумной системой. Насос соединен со стойкой-ресивером 19 резиновым трубопроводом 30, а стойка-ресивер 19 с вакуумными камерами 20 - трубопроводами 31. Трубопровод 30 связан со стойкой-ресивером 19 скользящими вдоль стойки хомутами 32. Под колесом 25 соосно ему установлен фланец 33, к которому прикреплен опорно-поворотный круг 34, находящийся в зацеплении с приводной шестерней 35. Другой стороной круг 34 крепится к корпусу 36j в котором расположены редуктор, гидромотор, гидронасос и другая гидроаппаратура . Снизу к корпусу 36 крепится крестовая каретка 37 с парой взаимно перпендикулярных фасонных направляняцих с приводными гидроцилиндрами 38. Узел 39 стыковки рабочего органа 16 с быстросменньлда схватами (не показаны) соединен с кареткой 37 через карданов шарнир 40 и наклоняется в двух взаимно перпендикулярных вертикальных плоскостях посредством гидроцилиндров 41. Монтажная опора снабжена механизмом фиксации, состоящим из храпового колеса 24, неподвижно закреплённого на вертикальной оси 42 рабочего органа 16, жестко прикрепленной снизу к корпусу 15, и храпового колеса 25, закрепленного на оси 42 d возможностью вращения вокруг нее и жестко связанного с поворотной частью рабочего органа 16 связями 26. Между колесами 24 и 25 на оси 42 с возможностью вращения вокруг нее закреплена балка 1В. Установленный на оси 42 фланец 33 усилен ребрами 43. К фланцу 33 болтами крепится неповоротная часть опорно-поворотного круга 34, поворотная часть которого болтами скреплена с корпусом 36. На балке 18 закреплен кронштейн 44, на котором шарнирно закреплена храповая собачка 45 с возможностью поворота сердечником 46 электромагнита 47 и возвратной пружиной 48, расположенных на кронштейне 44. Собачка 45 входит в зацепление с колесами 24 и 25, в результате чего балка 18 может быть жестко соединена с неподвижной частью рабочего органа 16 и с его поворотной частью. Вакуумная камера 20 прикреплена стойке 19 с помощью шарового шарнира 49, что позволяет самоустанавливаться камере 20 на монтажный горизонт при отклоненном положении стой ки 19 от вертикального положения, Вакуумная камера 20 имеет герметизирующее кольцевое уплотнение 50 и штзгцер 51 для откачки воздуха. Три независимых каната подвески закреплены на конце стрелы 7, огибают систему блоков 52 грузовой тележки 14, блоки 23 корпуса 15 рабочего органа 16, снова систему блоков 52, блоки 53, расположенные у корня стрелы 7, блоки 54 оголовка 6 и другим концом закреплены на трехсекционном барабане 55 грузовой лебедки 12, размещенной на консоли 8. Управление краном-манипулятором может осуществляться двумя операторами дистанционно с помощью переносных пультов. При этом один опера тор находится в зоне захвата сборных конструкций внизу и управляет захватом конструкции, а второй находится в зоне монтажа конструкции наверху и управляет установкой конструкции в проектное положение. Управление транспортировкой конструкции может производиться каждым из операторов в пределах зоны их видимости с передачей управления друг другу либо автоматизированным спосо бом с помощью известных радиопрограм мных средств. Работа крана-манипулятора под управлением двух операторов происхо дит следующим образом. Оператор, находящийся внизу, опускает находящийся примерно над захватываемой конструкцией рабочий орган 16 до момента опирания стойки 19 (фиг.1 и 2) на уровень земли и ва кз умирует камеры 20 которые надежно сцепляются с основанием. Оператор, управляя электромагнитом47 (фиг. 3), перебрасывает собачку 45 из зацеплени с поворотным колесом 25 в зацепление с неподвижным колесом 24. В результа те рабочий орган 16 благодаря стойке 19 и балке 18 приобретает надежную связь с неподвижным основанием. Это стабилизирует положение рабочего ор74гана J6 и позволяет более точно ориентировать схват 21. Далее оператор поворачивает и смещает схват 21 в пространстве так, чтобы он точно был ориентирован относительно захватываемого груза 22, опускает его на соответствующую высоту и производит захват груза 22. После этого оператор, управляя электромагнитом 47, перебрасывает собачку 45 обратно и зацепляет ее с поворотным храповым колесом 25, девакуумирует камеры 20 и включением грузовой лебедки 12, опорно-поворотного механизма 5, механизмов ходовых тележек 2 и лебедки 13 перемещения грузовой тележки 14 (фиг.1) транспортирует груз в зону монтажа.В определенный момент управление краном-манипулятором передается оператору, находящемуся наверху. Данный оператор заканчивает процесс транспортировки груза 22, в результате которой он оказывается примерно над местом установки. Оператор, управляя поворотным механизмом 34 (фиг.2 и 3), грубо ориентирует груз в плане. При этом вокруг вертикали разворачивается и стойка 19, благодаря находящейся в зацеплении с поворотным колесом 25 балки 18, и оказывается внутри контура монтируемого здания. Далее оператор опускает рабочий орган 16 до опирания стойки 19 на перекрытие монтажного горизонта, вакуумирует камеры 20 и перебрасывает собачку 45 в зацепление с неподвижным колесом 24. При этом высота стийки должна обеспечивать между местом установки конструкции и ее низом зазор, необходимый для дальнейших манипуляций с грузом. Оператор, управляя механизмами лилинейных горизонтальных и угловых сме-; щений схвата 21 в пространстве, точ но ориентирует и позиционирует конструкцию (груз) 22 и далее, опуская рабочий орган 16, устанавливает конструкцию 22 на место. После закрепления оператор освобождает ее от схвата 21, перебрасывает собачку 45 в зацепление с поворотным колесом 25, девакуумирует камеры 20 и, управляя транспортньми механизмами крана-манипулятора, перемещает рабочий рган 16 в зону захвата сборных контрукций,. и цикл повторяется. S1 Формула изобретения 1. Кран-манипулятор преимущественно для монтажа зданий из сборного ж шезобетона, содержащий установленнук на ходовой платформе башню, стрелу с подвижной вдоль нее грузовой тележкой, рабочий орган, включающий в себя корпус и закреплен ные на нем схват с механизмами его линейных горизонтальных иугловых смещений в двух взаимно перпендикулярных плоскостях и опорно-поворотный механизмS и подъемную простран ственную подвеску с канатами, огибающими разнесенные в плане направг яклцие блоки, смонтированные на грузовой тележке и корпусе рабочего органа, отличающи.йся тем, что, с целью повышения точности позиционирования5 он снабжен монтажной опорой для рабочего органа, вклю чающей в себя смонтированную посредством вертикальной оси с возможностью вращения вокруг нее горизон176тальную балку, шарнирно закрепленную на конце последней роликовую обойму и установленную в ней с возможностью вертикального перемещения стойку с радиально разнесенными в плане и шарнирно закрепленными на ее нижнем конце вакуумными камерами, и механизмом фиксации положения монтажной опоры. 2.Кран-манипулятор по п.1, о т личающийся тем, что механизм фиксации положения монтажной опоры содержит храповые колеса, одно из которых закреплено на вертикальной оси рабочего органа жестко, адругое - с возможностью вращения вокруг нее и жестко связано с поворотной частью опорно-поворотного механизма, и смонтированную на горизонтальной балке с возможностью взаимодействия с одним и другим храповыми колесами собачку для соединения балки с корпусом и опорно-поворотным механизмом рабочего органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-манипулятор для монтажа зданий из сборного железобетона | 1984 |
|
SU1203011A1 |
| Кран-манипулятор К.Б.Розина | 1986 |
|
SU1567506A1 |
| Кран-манипулятор | 1987 |
|
SU1481194A2 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 2002 |
|
RU2209761C1 |
| Кран-манипулятор с тросовыми приводами | 2022 |
|
RU2791750C1 |
| БАШЕННЫЙ КРАН | 2006 |
|
RU2307783C1 |
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |
| Способ подъема груза на мостовой кран | 2023 |
|
RU2814140C1 |
| Устройство для монтажа башенного крана | 1986 |
|
SU1323521A1 |
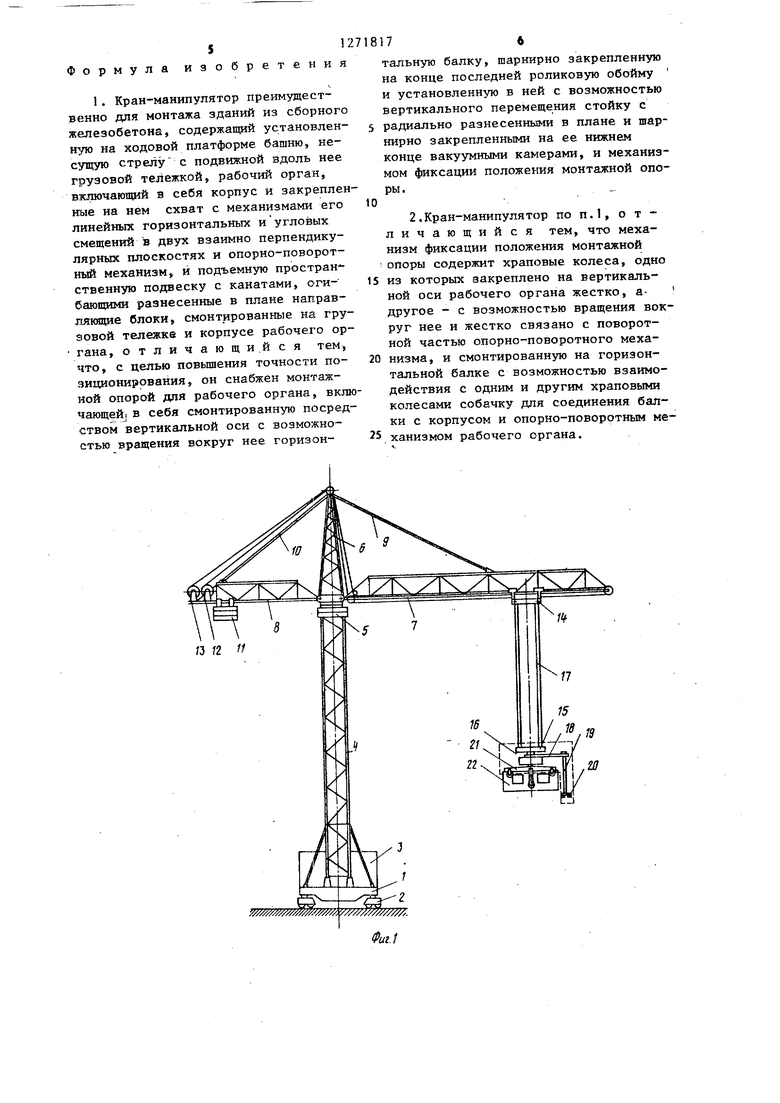
Изобретение относится к подъемно-транспортным машинам преимущественно для монтажа зданий из сборного железобетона. Цель изобретения - повышение точности позиционирования. Кран-манипулятор кроме традиционных металлоконструкций и механизмов башенных кранов содержит подвешенный на трех независимых и разнесенных в плане подвесках рабочий орган с пятью степенями подвижности, показанных стрелками, и включающий подвижную в роликовой обойме стойку с вакуумными камерами. Роликовая обойма закреплена ни конце горизонтальной балки, которая другим концом смонтирована на вертикальной оси рабочего органа с возможностью поворота относительно нее. Стойка, надежно стыкующаяся с перекрытием монтажного горизонта здания при помощи камер,стабилизирует положение рабочего органа, после чего возможно точное ориi ентирование в пространстве при помощи механизмов линейных горизонталь(Л ных и угловых смещений рабочего органа захваченной схватом сборной конструкции. 1 з.п.ф-лы, 5 ил.
52 « П Фиг. 5 7
| Искусственная стопа | 1947 |
|
SU120301A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
