Изобретение относится к бурению и капитальному ремонту скважин (КРС) нефтяных и газовых скважин с давлением продуктивного пласта ниже гидростатического.
Известна система для регулирования свойств бурового раствора, включающая датчики параметров бурового раствора, регулятор, блок дозирования, соединенный с насосом, сумматор и ключи, дополнительный сумматор, блок усреднения, блоки памяти, блок управления ключами, датчик времени, элементы НЕ, И, ИЛИ и компараторы [А.С. СССР №1041677; опубл. 15.09.83]. В этой системе регулирование свойств буровых растворов выполняется не только в текущем цикле, но и предыдущем за счет введения элементов бинарной логики НЕ, И, ИЛИ, что позволяет системе не реагировать на случайные флуктуации регулируемого параметра бурового раствора, тем самым точнее реагировать на возможные изменения.
Наиболее близким к изобретению техническим решением является автоматизированная система для регулирования свойств бурового раствора, содержащая наземную циркуляционную систему, состоящую из приемной емкости для бурового раствора с уровнемером, соединенную транспортной линией со скважиной через блок очистки, бункер для сыпучих материалов (с утяжелителем), дозатор, смеситель, насос смесителя, датчики (плотномеры) плотности на выходе и входе в скважину соответственно, узел управления, регулируемые задвижки и контур-накопитель [А.С. СССР №1423728; опубл. 15.09.88]. В этой системе выполняется регулирование свойств буровых растворов, за счет поддержания оптимальной их плотности, посредством задвижки. Узел управления соединен с управляющими входами насоса, аккумулирующей емкостью для пульпы с уровнемером и управляемым шибером, узлом подачи пульпы, и автоматически поддерживает плотность бурового раствора степенью открытия регулируемой задвижки в случае рассогласования показаний плотномеров, установленных на входе и выходе скважины.
Проанализировав вышеперечисленные системы регулирования свойств буровых растворов, можно сделать вывод, что основа управления первой представленной системы автоматизированного контроля параметров бурового раствора лежит на логических элементах, выполняющих роль коммутатора. Информация о необходимости изменения параметра раствора организована путем сравнения при помощи компараторов сигналов, снимаемых датчиками, с некоторой усредненной задаваемой константой, «зашитой» в плате устройства автоматизации. Управляющий сигнал вырабатывается после третьего цикла измерения, и процесс регулирования заканчивается в том случае, когда отклонение регулируемого параметра попадает в зону допусков [А.С. СССР, №1041677; опубл. 15.09.83].
Данной системы присуще медленное реагирование на происходящие изменения, т.е. исключается оперативность реагирования системы на быстроизменяющиеся условия, что не позволяет оптимизировать (установить оптимальные параметры) быстроизменяющиеся процессы, например, оперативно управлять плотностью бурового раствора в случае использования газообразных промывочных агентов.
Вторая представленная система рассчитана на введение корректив по величине прямого измерения плотности бурового раствора - плотномерами. Если рассогласование между заданной плотностью и плотностью измеренной плотномером, расположенном в желобе циркуляционной системы, существует, то положение задвижки в системе контура-накопителя остается без изменений. В случае рассогласования показаний между датчиком плотности и задаваемой величиной плотности происходит изменение степени открытия управляющей задвижки в системе контура-накопителя на пропорциональную величину [А.С. СССР №1423728; опубл. 15.09.88].
В случае присутствия двух или многофазных сред, например газообразных промывочных агентов в виде пенных систем, прямой замер плотности среды плотномерами будет не точен. Более того, регулирование свойств бурового раствора, которое выполняется степенью открытия задвижки установленного в контуре-накопителе регулирования плотности, является инерционной и низкоточной процедурой.
Задачей изобретения является повышение точности и оперативности регулирования свойств бурового раствора, приготовленного на основе газообразных промывочных агентов - пенных растворов (пены), путем точного и быстрого реагирования системы на возможные ее изменения.
Технический результат - повышение оперативности и точности расчета плотности пены, а также при необходимости регулировки ее плотности.
Технический результат достигается тем, что автоматизированная система для регулирования свойств бурового раствора, приготовленного на основе газообразных агентов, содержащая дистанционно управляемые транспортные линии: первую линию, предназначенную для измерения параметров газовой составляющей пены и регулирования подачи газа и включающую компрессор, серийно выпускаемые частотно-регулируемые приводы, две управляемые задвижки, а также расходомер, термометр и манометр, на основании показаний которых с последующим пересчетом по аналитическим зависимостям в значение плотности пены формируется работа управляемых устройств - задвижек и компрессора; вторую линию, контролирующую и регулирующую поток жидкости, находящуюся между емкостью для ПОЖ и эжектором и включающую в себя две дистанционно управляемые задвижки, насос для подачи жидкости, а также расходомер жидкости, термометр и манометр, на основании показаний которых и пересчета в значение плотности пены формируется работа управляемых устройств - задвижек и управляемого частотно-регулируемым приводом насоса; третью линию, предназначенную для контроля динамических свойств пены и располагающуюся непосредственно после эжектора перед устьем скважины, в ее состав входят обратный клапан, манометр, термометр и управляемая задвижка, согласно изобретению снабжена коммутатором, коммутатором АЦП платы сопряжения с ЭВМ и частотно-регулируемыми приводами, соединенными с компрессором и насосом с одной стороны и ЭВМ с другой стороны через коммутатор платы сопряжения, при этом на всех транспортных линиях введены дистанционно управляемые через коммутатор задвижки.
Точность контроля и быстрота реакции системы достигается использованием цифровой формы передачи и обработки информации с высокой точностью преобразования. Для данной системы контроль плотности выполняется не прямым измерением, а расчетным путем по аналитическим зависимостям, используя данные, снимаемые с КИП, установленных на транспортных линиях системы приготовления пены. Оперативное поддержание необходимой плотности пены выполняется с помощью частотно-регулируемых приводов, устанавливаемых на компрессорной установке и насосе для прокачки жидкости (ПОЖ).
Через коммутатор АЦП с необходимой периодичностью и высокой точностью, равной точности преобразования, выполняются измерения физико-динамических параметров пенообразующих агентов, на основе которых рассчитывается плотность пены для последующего ее сравнения с задаваемым значением. По результатам рассчитанной плотности пены выполняется регулировка плотности пены с помощью частотно-регулируемых приводов, соединенных с компрессором и насосом с одной стороны и ЭВМ с другой стороны через коммутатор платы сопряжения, регулировка выполняется быстро и точно циклично с заданным шагом до требуемого значения плотности пены, при необходимости изменения давления газа будет изменяться производительность компрессора, при необходимости изменения давления ПОЖ будет изменяться производительность насоса, подающего ПОЖ в систему. В системе внесены дистанционно управляемые задвижки на всех транспортных линиях, управление дистанционными устройствами выполняется также через коммутатор, все регулируемые задвижки кроме дренажной открыты и участвуют в работе системы, когда возникает необходимость «продувки» эжектора, открывается дренажная задвижка, при этом остальные задвижки закрываются, дренажная задвижка также открывается, когда возникает необходимость сброса давления в транспортной линии подачи ПОЖ, например, если расчетное значение плотности пены превышает требуемое.
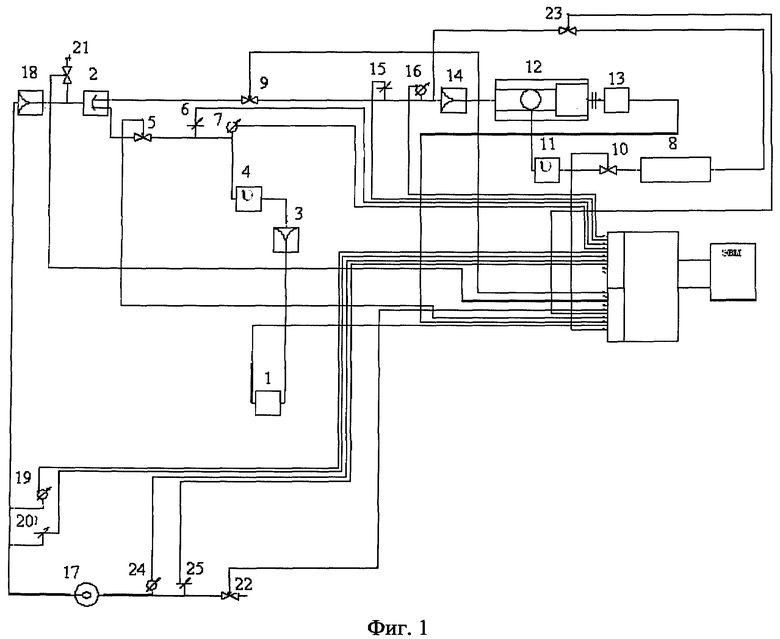
Изобретение поясняется чертежами. На фигуре 1 представлена схема автоматизированной системы для регулирования свойств бурового раствора, приготовленного на основе газообразных агентов. Система содержит компрессор 1, эжектор 2, обратный клапан 3, расходомер 4, управляемую задвижку 5, цифровой термометр 6, манометр 7, емкость для ПОЖ 8, дистанционно управляемые задвижки 9 и 10, расходомер жидкости с дистанционным контроллером 11, насос для жидкости 12, управляемый асинхронным двигателем с частотным преобразователем 13, обратный клапан 14, термометр 15, манометр 16, устье скважины 17, обратный клапан 18, манометр 19, термометр 20, дренажную задвижку 21, дистанционно управляемые задвижки 22 и 23, манометр 24 и термометр 25.
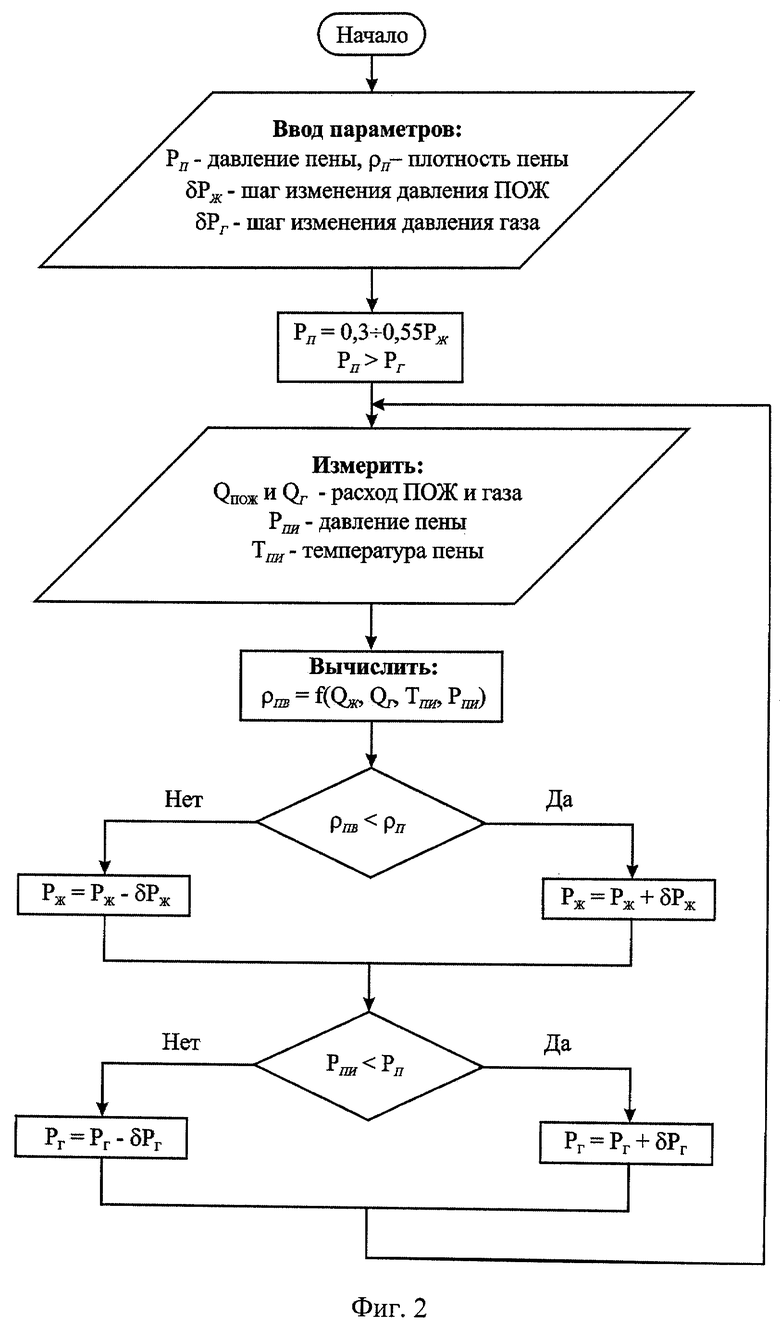
На фигуре 2 представлен алгоритм работы автоматизированной системы согласно изобретению.
Система, охарактеризованная в данном изобретении, работает следующим образом.
Система включает в свой состав три транспортные линии.
Первая транспортная линия контролирует и регулирует подачу воздуха (газа) в систему циркуляции пены (фиг.1). На транспортной линии в горизонтальном положении между компрессором 1 и эжектором 2 располагаются контрольно-измерительная и регулировочная линии подачи воздуха (газа). Подача воздуха (газа) осуществляется компрессором 1 через обратный клапан 3, расходомер 4, управляемую задвижку 5.
Контрольно-измерительные приборы (КИП) - цифровой термометр 6 и манометр 7 составляют контрольно-измерительную линию подачи воздуха. КИП устанавливаются на посадочных узлах контрольно-измерительной линии.
Вторая транспортная линия контролирует и регулирует поток жидкости (ПОЖ) в системе циркуляции пены. Располагается данная линия между емкостью для ПОЖ 8 и эжектором 2 и включает в себя две дистанционно управляемые задвижки 9 и 10, расходомер жидкости с дистанционным контроллером 11, насос для жидкости 12, управляемый асинхронным двигателем с частотным преобразователем 13, обратный клапан 14, термометр 15 и манометр 16.
Подача ПОЖ в систему осуществляется с помощью насоса 12 из емкости 8 через управляемую задвижку 10 и расходомер 11.
Третья транспортная линия предназначена для контроля динамических свойств пенного раствора. Располагается данная линия непосредственно после эжектора 2 перед устьем скважины 17. В состав третьего измерительного участка входят обратный клапан 18, манометр 19, термометр 20, а также дренажная задвижка 21.
Для контроля перепада давления в стволе скважины на выкидной линии скважины 17 установлены манометр 24 и термометр 25.
Приготовление пены осуществляется с помощью эжектора, устойчивая работа которого сохраняется при следующих значениях [3]:

где РП - давление пены на выходе из эжектора;
РЖ - давление пенообразующей жидкости (ПОЖ) на входе эжектора.
Для воздушной составляющей устойчивая работа эжектора определяется из условий РП>РГ, где РГ - давление газа на входе эжектора.
Физико-динамические параметры пены на входе скважины должны обладать характеристиками, которые определяются геолого-техническими условиями бурения, т.е. глубиной скважины, температурой окружающей среды, пластовым давлением и т.д.
Плотность пены - основной параметр, который подлежит автоматическому регулированию с помощью предлагаемой системы. Плотность пены на выходе эжектора будет рассчитываться по формуле, т.к. прямой метод измерения плотности плотномерами - низкоэффективный способ из-за присутствия двух и более фаз. Например, высокий декремент затухания акустической волны в газовой составляющей пены является причиной низкой эффективности акустических (ультразвуковых) плотномеров. Низкой эффективностью будут обладать гамма-гамма плотномеры ввиду многофазности исследуемого потока (пены).
Исходя из вышесказанного, алгоритм работы автоматизированной системы имеет следующую структуру (фиг.2).
Ввод исходных параметров и последующий контроль физико-динамических свойств пены производится при помощи интерфейса программы компьютера.
Задаются параметры пены - давление и плотность, необходимые для оптимального процесса бурения с учетом возможных изменений геолого-технических условий, а также шаг изменения давления компонентов, составляющих пену, т.е. шаг изменения давления ПОЖ и шаг изменения давления газа.
Затем выполняются измерения физико-динамических параметров пены и компонентов, участвующих в ее приготовлении, таких как давление пены на выходе из эжектора Р, давление ПОЖ на входе эжектора PПОЖ, давление газа на входе эжектора, расход ПОЖ QПОЖ, расход газа QГ и температура пены Т.
По измеренным параметрам рассчитывается степень аэрации пены αo, т.е. отношение расхода газа QГ в нормальных условиях, к расходу ПОЖ QПОЖ [4]:
Далее расчетным путем определяется плотность пены ρПВ по формуле [4]:
где, ρж - плотность ПОЖ, кг/м3;
αo - степень аэрации;
ρг - плотность газа, используемого для приготовления пены, кг/м3;
РПИ - давление пены, измеренное в третьей транспортной линии, МПа;
Po - атмосферное давление, МПа;
ТПИ - температура пены, измеренная в третьей транспортной линии, °K;
Тo - температура на устье скважины, °K;
Таким образом, выполнение расчетов плотности пены по показаниям КИП, установленных на транспортных линиях автоматизированной системы приготовления пены, с заданным шагом, позволяет с аналогичной дискретностью реагировать системе на возможные изменения.
Управление давлением газовой составляющей пены будет осуществляться с помощью преобразователя частоты - частотно-регулируемым приводом, который включает в себя преобразователь частоты и асинхронный двигатель.
Управление давлением насоса дозирующего ПОЖ также будет выполняться с помощью серийно выпускаемого частотно-регулируемого привода.
Преобразователи частоты предназначены для преобразования одно- или трехфазного напряжения с постоянной частотой 50 Гц в трехфазное напряжение переменной частотой в диапазоне от 0,2 до 400 Гц. Это свойство преобразователей частоты делает возможным их широкое применение для бесступенчатого регулирования скорости любых асинхронных электродвигателей, в том числе электродвигателей компрессоров, насосов, подъемников и других механизмов.
Дистанционное управление производительностью компрессорной установки и насосов в соответствии с алгоритмом работы системы будет выполняться автоматически и циклично до уровня, пока плотность пены не достигнет требуемых значений, т.е. когда отклонение плотности пены попадет в зону задаваемых допусков, процесс регулирования плотности будет остановлен.
Контроль плотности образующей пены будет осуществляться аналитическим путем по формуле 3. Для этой цели компьютер выполняет опрос датчиков, которые имеют связь с компьютером через коммутатор АЦП платы сопряжения с ЭВМ. С задаваемым шагом опроса компьютер считывает информацию о температуре, давлении, расходе газообразных агентов, участвующих в образовании пены. Информация считывается с помощью КИП, установленных на транспортной линии подачи ПОЖ, таких как термометр 15, манометр 16 и расходомер 11. Затем информация считывается с термометра 6, манометра 7 и расходомера 4, установленных на транспортной линии подачи воздуха (газа). Информация от датчиков, установленных на третьей транспортной линии от термометра 20 и манометра 19 - линии подачи пены, снимается компьютером через тот же коммутатор АЦП платы сопряжения с ЭВМ.
Коммутатор АЦП платы сопряжения предназначен для определения порядка опроса КИП, установленных на транспортных линиях (см. фиг.1).
Для автоматизированного управления физико-динамическими свойствами пены с помощью дистанционно-управляемых устройств удаленных от ЭВМ предпочтительней использовать интерфейс с токовым выходом.
Информация, необходимая для расчета плотности пены, поступает в компьютер. После выполнения вычислений компьютер сравнивает расчетную плотность пены с базовой плотностью, задаваемой в начале цикла опроса. В том случае, когда расчетное значение плотности пены не совпадает с заданным значением, система цикл за циклом с заданным шагом изменяет давление ПОЖ в транспортной линии подачи ПОЖ. Манипуляция давлением будет выполняться частотно-регулируемым приводом 13 по заданному алгоритму, цикл за циклом, с указанным шагом, до уровня, пока расчетное значение плотности пены не совпадет с заданным.
При дальнейшем изменении регулируемого параметра и выходе его за пределы установленной границы допуска цикличность работы системы повторяется. Если плотность пены, вычисленная по формуле (3), меньше заданного значения, то с помощью частотно-регулируемого привода будет увеличиваться производительность насоса. При этом будет повышено давление жидкой составляющей (ПОЖ) на величину шага δPЖ. Аналогично работает система управления давлением воздушной составляющей через управляемую компрессорную установку. Если давление пены, измеренное в третьей транспортной линии (показания манометра 19), меньше заданного значения РП, то с помощью частотно-регулируемого привода будет увеличена производительность компрессора. При этом давление газовой составляющей будет увеличено на величину шага δРГ. Увеличение производительности насоса или компрессора до требуемого значения выполняется циклично с шагом, задаваемым в начале работы.
В обоих случаях управление насосом или компрессором выполняется с помощью серийно выпускаемых частотно-регулируемых приводов.
Управление дистанционными устройствами, в том числе и задвижками 5, 9, 10, 21, 22 и 23, выполняется компьютером через блок сопряжения, состоящего из: коммутатора связи платы сопряжения. Для представляемой системы достаточно иметь два фиксированных положения управляемых задвижек, открыто или закрыто. Задвижки такой конструкции серийно выпускаются. Открытие задвижки 21 по команде компьютера выполняется в том случае, когда возникает необходимость «продувки» эжектора, когда не выполняется условие, указанное в формуле (1), при этом задвижки 22, 9 и 10 закрываются. Открытие задвижки 23, по команде компьютера, выполняется также в том случае, когда возникает необходимость сброса давления в транспортной линии подачи ПОЖ, например, если расчетное значение плотности пены превышает заданную оператором. В этом случае все дистанционные задвижки кроме 5 открыты и система находится в работе.
ИСПОЛЬЗУЕМЫЕ ИСТОЧНИКИ
1. А.с. СССР 1423728, М.Кл.7; E21B 44/00. Автоматическая система для регулирования свойств бурового раствора / Всесоюзный НИИ по креплению скважин и буровым растворам. Авт.: А.Г.Аветисов, С.И.Мхитаров, А.Л.Ульянов, Ю.М.Орлов, Н.А.Колесников (СССР). - №4140814/22-03; Заявлено 25.07.86. Опубл. 15.09.88. - БИ. - 1988. - №34.
2. А.с. СССР 1041677, М.Кл.7; E21B 44/00. Автоматизированная система для регулирования свойств бурового раствора / Всесоюзный НИИ по креплению скважин и буровым растворам. Авт.: Е.И.Тарабрин, А.Л.Ульянов (СССР). - №3439080/22-03; Заявлено 17.05.82. Опубл. 15.09.83. - БИ. - 1983. - №34.
3. Временная инструкция по глушению скважин с применением пенных систем с наполнителем в условиях АНПД. К.М.Тагиров, Н.И.Кабанов, Р.А.Гасумов и др. - Ставрополь, 1999.
4. Освоение скважин с применением пенных систем. А.В.Амиян. - Москва, 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЦИРКУЛЯЦИИ ПЕНЫ | 1991 |
|
RU2024730C1 |
| СПОСОБ ИЗМЕРЕНИЙ ДЕБИТОВ, КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЕЙ ДОБЫЧИ ПРОДУКЦИИ НЕФТЯНЫХ СКВАЖИН И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2365750C1 |
| СПОСОБ ПОВЫШЕНИЯ НЕФТЕОТДАЧИ ПЛАСТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2802646C2 |
| Автоматическая система для регулирования свойств бурового раствора | 1986 |
|
SU1423728A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЗАКАЧИВАЕМЫХ В СКВАЖИНУ ЖИДКОСТЕЙ | 2021 |
|
RU2758287C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ХАРАКТЕРИСТИК НАСОСНО-ЭЖЕКТОРНЫХ СИСТЕМ С ИСПОЛЬЗОВАНИЕМ ВЫХЛОПНЫХ ГАЗОВ | 2022 |
|
RU2784588C1 |
| НАГНЕТАТЕЛЬНАЯ СКВАЖИНА | 2015 |
|
RU2574641C2 |
| МОБИЛЬНАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ С ГЕНЕРИРОВАНИЕМ ПЕНЫ КОМПРЕССИОННЫМ СПОСОБОМ | 2017 |
|
RU2663399C1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ИНЖЕКЦИИ РАСТВОРА ИНГИБИТОРА КОРРОЗИИ ДЛЯ СКВАЖИН | 2017 |
|
RU2676779C2 |
| СПОСОБ ПРОВОДКИ СКВАЖИН В ВЫСОКОПРОНИЦАЕМЫХ ТРЕЩИНОВАТЫХ ГАЗОНАСЫЩЕННЫХ КОЛЛЕКТОРАХ | 2001 |
|
RU2184206C1 |
Изобретение относится к бурению и капитальному ремонту нефтяных и газовых скважин с давлением продуктивного пласта ниже гидростатического. Техническим результатом является повышение эффективности регулирования свойств бурового раствора, приготовленного на основе газообразных промывочных агентов - пенных растворов, путем точного и быстрого реагирования системы на возможные ее изменения. Технический результат достигается тем, что в автоматизированную систему поддержания заданной плотности бурового раствора, приготовленного из газообразных промывочных агентов, содержащую контрольно-измерительные приборы и дистанционно-управляющие устройства, включены коммутатор, коммутатор АЦП платы сопряжения с ЭВМ и частотно-регулируемые приводы для быстрого управления расходом жидкой или газовой составляющих газообразных агентов. Точность контроля и быстрота реакции системы достигается использованием цифровой формы передачи и обработки информации с высокой точностью преобразования. Для данной системы контроль плотности выполняется не прямым измерением, а расчетным путем по аналитическим зависимостям, используя данные, снимаемые с контрольно-измерительных приборов, установленных на транспортных линиях системы приготовления пены. Оперативное поддержание необходимой плотности пены выполняется с помощью частотно-регулируемых приводов, устанавливаемых на компрессорной установке и насосе для прокачки пенообразующей жидкости. 2 ил.
Автоматизированная система для регулирования свойств бурового раствора, приготовленного на основе газообразных агентов, содержащая дистанционно управляемые транспортные линии: первую линию, предназначенную для измерения параметров газовой составляющей пены и регулирования подачи газа и включающую компрессор, серийно выпускаемые частотно-регулируемые приводы, две управляемые задвижки, а также расходомер, термометр и манометр, на основании показаний которых с последующим пересчетом по аналитическим зависимостям в значение плотности пены формируется работа управляемых устройств - задвижек и компрессора; вторую линию, контролирующую и регулирующую поток жидкости, находящуюся между емкостью для пенообразующей жидкости (ПОЖ) и эжектором и включающую в себя две дистанционно управляемые задвижки, насос для подачи жидкости, а также расходомер жидкости, термометр и манометр, на основании показаний которых и пересчета в значение плотности пены формируется работа управляемых устройств - задвижек и управляемого частотно-регулируемым приводом насоса; третью линию, предназначенную для контроля динамических свойств пены и располагающуюся непосредственно после эжектора перед устьем скважины, в ее состав входят обратный клапан, манометр, термометр и управляемая задвижка, отличающаяся тем, что в систему введены коммутатор, коммутатор АЦП платы сопряжения с ЭВМ и частотно-регулируемые приводы, соединенные с компрессором и насосом с одной стороны и ЭВМ с другой стороны через коммутатор платы сопряжения, при этом на всех транспортных линиях введены дистанционно управляемые через коммутатор задвижки.
| Автоматическая система для регулирования свойств бурового раствора | 1986 |
|
SU1423728A1 |
| Система автоматического регулирования реологических параметров бурового раствора | 1981 |
|
SU969885A1 |
| Циркуляционная система с автоматическим регулированием свойств бурового раствора | 1982 |
|
SU1032165A1 |
| Устройство для автоматического ввода жидкого реагента в буровой раствор | 1982 |
|
SU1035205A1 |
| Автоматизированная система для регулирования свойств бурового раствора | 1982 |
|
SU1041677A1 |
| Способ автоматического поддержания заданной плотности бурового раствора и циркуляционная система для его реализации | 1987 |
|
SU1518482A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ В ПРОЦЕССЕ БУРЕНИЯ | 1988 |
|
RU1605630C |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ОБЪЕМНОГО ГАЗОСОДЕРЖАНИЯ И ИСТИННОЙ ПЛОТНОСТИ БУРОВОГО РАСТВОРА | 2005 |
|
RU2310069C2 |
| US 4595343 A1, 17.06.1986 | |||
| US 5873420 A, 23.02.1999 | |||
| EP 1898044 A2, 12.03.2008. | |||

