Область техники, к которой относится изобретение
Настоящее изобретение относится к детектору согласно ограничительной части пункта 1 формулы изобретения.
Уровень техники
Известен детектор, который во время работы сообщает оператору о наличии и положении в строительных конструкциях скрытых объектов, таких, например, как трубы, кабели, арматура в стенах, потолках или полах. Известный детектор также имеет колесо, позволяющее перемещать детектор вдоль поверхности исследуемого объекта для сканирования или зондирования, исследуемого объекта.
Раскрытие изобретения
Предметом изобретения является детектор - прибор для обнаружения и определения положения (локализации) скрытых объектов в исследуемом объекте, содержащий корпус, направляющее средство для обеспечения направленного перемещения детектора вдоль исследуемого объекта по меньшей мере в одном направлении движения, и устройство вывода.
Предлагается ручной детектор для обнаружения и определения положения скрытых объектов в исследуемом объекте, содержащий корпус, направляющее средство, установленное на корпусе для обеспечения направленного перемещения детектора вдоль исследуемого объекта по меньшей мере в одном направлении перемещения, измерительное устройство для регистрации по меньшей мере одного параметра движения при перемещении корпуса, устройство управления и устройство вывода для вывода информации оператору. В заявленном детекторе устройство вывода расположено на лицевой стороне корпуса и выполнено в виде цифрового дисплея, а устройство управления в сочетании с устройством вывода выполнено с возможностью вывода по меньшей мере одного размерного, т.е. имеющего размерность, значения расстояния, определяемого в направлении перемещения, в виде формируемого электронными средствами цифрового символа, и с возможностью обновления выводимого значения расстояния, осуществляемого по меньшей мере в основном синхронно с изменением параметра движения, причем ручной детектор дополнительно содержит устройство ввода и имеет режим ввода с возможностью задания посредством устройства ввода точки отсчета, относительно которой определяется значение расстояния, причем задание точки отсчета возможно без прерывания процесса обнаружения и определения положения скрытых объектов.
Изобретение обеспечивает повышение комфортности управления ручным детектором, позволяя выводить информацию о расстоянии в интуитивно понятной оператору форме. Благодаря тому, что устройство управления в сочетании с блоком индикации выполнено с возможностью отображения значения расстояния в виде формируемого электронными средствами цифрового символа, может быть достигнуто особенно быстрое и точное восприятие оператором информации о расстоянии. Этот символ может отображаться цифровым дисплеем, например дисплеем на светодиодах или жидкокристаллическим дисплеем.
Дополнительный технический результат, достигаемый в изобретении, заключается в повышении скорости и удобства разметки исследуемого объекта одновременно с выявлением в нем скрытых объектов и определением их местоположения. Наличие устройства ввода позволяет оператору отказаться от применения дополнительных вспомогательных средств измерений, например измерительной линейки и/или разметочных средств для нанесения точки отсчета. Эта точка отсчета может служить нулевой точкой отсчета для определения значения расстояния или меткой рабочего положения, например, точки сверления. Например, оператор может исследовать с помощью предлагаемого в изобретении ручного детектора железобетонную стену для определения положения прутков арматуры и выбора точек сверления. Он может выбрать точку сверления в месте, где арматура отсутствует, не отводя детектор от стены и даже не прерывая ведения детектора по стене, нажать на орган управления устройства ввода, задав эту точку сверления как точку отсчета (ноль). Ведя детектор по стене дальше, оператор может легко размечать дальнейшие точки сверления с заданным шагом (например, через каждые 20 см, т.е. в точках, находящихся на расстоянии 20 см, 40 см, 60 см и т.д.), что достигается выводом значения расстояния и обновлением этого значения в процессе ведения детектора. При этом оператор сможет попутно убеждаться в отсутствии в этих точках арматуры. Если вдруг какая-нибудь из точек сверления оказалась поверх арматуры, оператор может сдвинуть ее на минимальное безопасное расстояние от арматуры, обнулить устройство вывода, нажав на орган управления устройства ввода и задав смещенную точку сверления как новую точку отсчета (ноль), и продолжать описанный выше процесс.
Направляющее средство предпочтительно выполнено в виде колеса, установленного на корпусе и позволяющее катать корпус в направлении перемещения. Вместо такого колеса или в дополнение к нему направляющее средство может быть выполнено в виде поверхности скольжения корпуса, которая служит для обеспечения скольжения корпуса по исследуемому объекту в направлении перемещения.
Под "размерным значением" следует понимать, в частности, значение размерной величины, которому соответствует по меньшей мере одна единица измерения. Единица измерения в предпочтительном случае относится к определенной системе единиц, например метрической системе или английской системе единиц. Если для оператора выводится значение расстояния, единица измерения может указываться вместе с ним. Если же соответствие между единицей измерения и значением расстояния является для оператора однозначно понятным, например, если единица измерения задается самим оператором, от указания единицы измерения можно отказаться.
Наличие измерительного устройства для регистрации по меньшей мере одного параметра движения при перемещении корпуса, а также то, что устройство управления в сочетании с устройством вывода выполнено с возможностью обновления выводимого значения расстояния, осуществляемого по меньшей мере в основном синхронно с изменением параметра движения, позволяет достичь особенно высокого уровня комфортности управления.
Под "параметром движения" следует понимать, в частности, параметр или показатель, посредством которого можно определить определенную характеристику движения корпуса относительно исследуемого объекта, такую, в частности, как длину отрезка пути или направление движения. Для регистрации параметра движения в измерительном устройстве могут применяться различные методы. Регистрация параметра движения может осуществляться, например, оптомеханическими средствами, например, по принципу оптрона или фотоэлектрического барьера. Кроме того, можно применять оптический метод, анализируя структуру поверхности исследуемого объекта для регистрации направления перемещения и/или длины отрезка пути при перемещении корпуса, например, с помощью измерительного преобразователя на приборах с зарядовой связью. При этом можно поверхность освещать, а для точного анализа поверхности можно применять лазерный луч. Возможно также применение для регистрации параметра движения электронного метода, в частности, с использованием радиолокационного сигнала. Если детектор для обнаружения и определения положения скрытых объектов выполнен с применением радиолокационного метода, для регистрации параметра движения можно дополнительно использовать радиолокационное устройство, применяемое для определения положения объектов.
В предпочтительном варианте осуществления изобретения это расстояние зависит по меньшей мере от длины отрезка пути корпуса в направлении перемещения, за счет чего можно достичь особенно интуитивного восприятия информации о расстоянии. Этот путь может быть путем, пройденным корпусом в направлении перемещения. В другом варианте путь может быть путем, на который корпус нужно переместить и который задается, например, оператором. Кроме того, расстоянием может быть расстояние между двумя обнаруженными скрытыми объектами или между двумя заданными оператором точками отсчета (опорными точками), например точками сверления.
Кроме того, для обнаружения и определения положения скрытых объектов предлагаемый в изобретении ручной детектор может иметь детекторное устройство, выполненное с возможностью сбора информации о результатах исследования исследуемого объекта, и имеет режим протоколирования для составления базы данных, в которой информация о результатах исследования соотнесена со значением расстояния. Благодаря этому можно достичь особенно высокой гибкости в применении детектора, если, например, составить заключение о состоянии исследованного объекта, которое после проведенного измерения может использоваться и для других применений.
В этой связи предлагается снабдить ручной детектор запоминающим устройством для хранения по меньшей мере базы данных, за счет чего может быть достигнуто особенно быстрое и простое создание базы данных или быстрый доступ к содержащейся в ней информации.
В предпочтительном варианте осуществления изобретения устройство вывода может иметь интерфейс для выдачи по меньшей мере значения расстояния во внешнее по отношению к корпусу устройство обработки данных вывода, благодаря чему может быть достигнута высокая гибкость анализа информации о расстоянии. Этот интерфейс предпочтительно предназначен для беспроводной передачи, как, например, интерфейс передачи данных по инфракрасной технологии или интерфейс передачи данных по технологии Bluetooth.
Предпочтительно, чтобы детектор имел режим ввода с возможностью ввода расстояния, задающего путь, на который необходимо переместить корпус. Это позволяет особенно легко и точно перемещать корпус в требуемое положение. Вводимым расстоянием может быть путь, который должен пройти детектор. Этот путь и вводимое расстояние могут различаться на некоторое значение длины, зависящее от определенного размера, в частности ширины корпуса в направлении перемещения. При этом путь, на который нужно переместить детектор, может устанавливаться автоматически на основании введенного расстояния.
Особенно простого и интуитивного управления детектором можно достичь в случае, если для обнаружения и определения положения скрытых объектов предлагаемый в изобретении ручной детектор содержит детекторное устройство, выполненное с возможностью сбора информации о результатах исследования исследуемого объекта, причем устройство управления выполнено с возможностью задания точки отсчета для определения значения расстояния на основании информации о результатах исследования в по меньшей мере частично автоматическом режиме. При этом обнаруженному скрытому объекту можно автоматически ставить в соответствие нулевую точку для определения значения расстояния.
Другие преимущества изобретения рассмотрены в приведенном ниже описании осуществления изобретения. Признаки изобретения раскрыты в нижеследующем описании, формуле изобретения и на чертежах в определенной комбинации друг с другом. При этом специалист при осуществлении изобретения сможет использовать эти признаки по отдельности или совместно в других рациональных комбинациях.
Краткое описание чертежей
Ниже сущность изобретения поясняется на примерах его осуществления, иллюстрируемых чертежами, на которых показано:
на фиг.1 - детектор, перемещаемый вдоль стены,
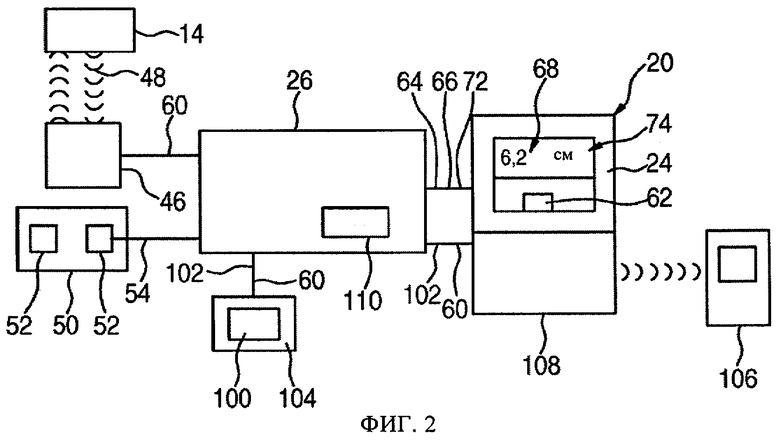
на фиг.2 - внутренние компоненты детектора,
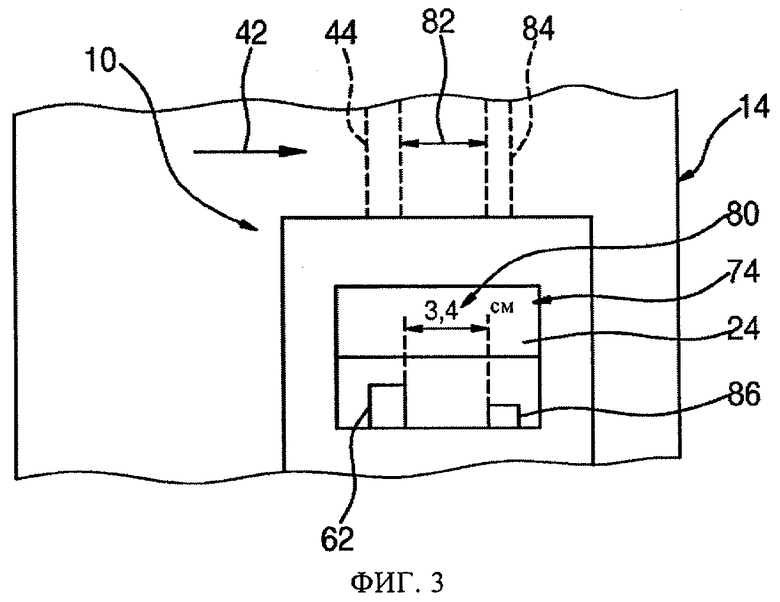
на фиг.3 - индикация расстояния между двумя обнаруженными скрытыми объектами,
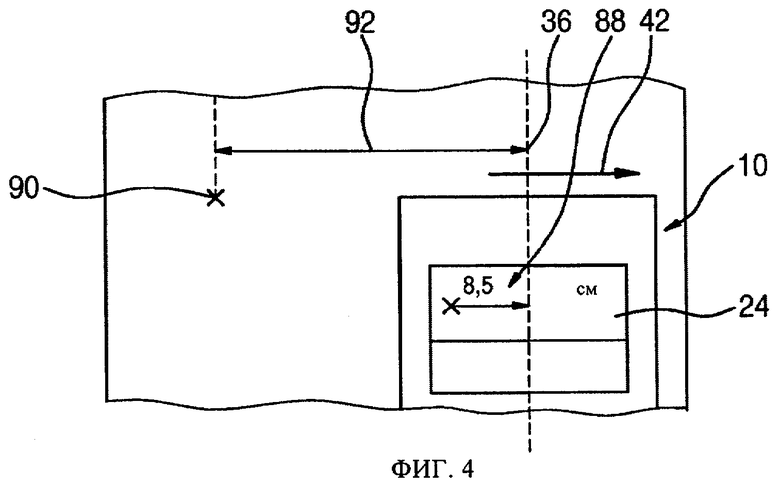
на фиг.4 - задание точки отсчета для измерения расстояния,
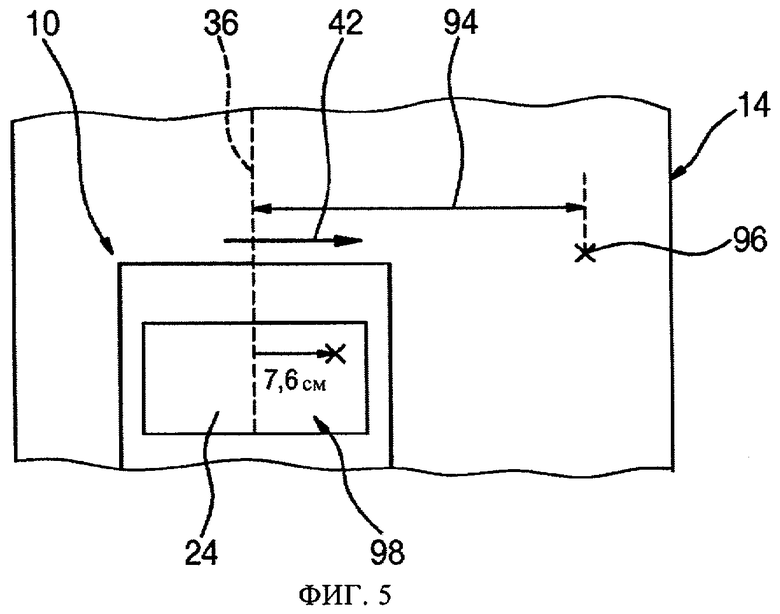
на фиг.5 - задание отрезка пути, на который нужно переместить детектор, и
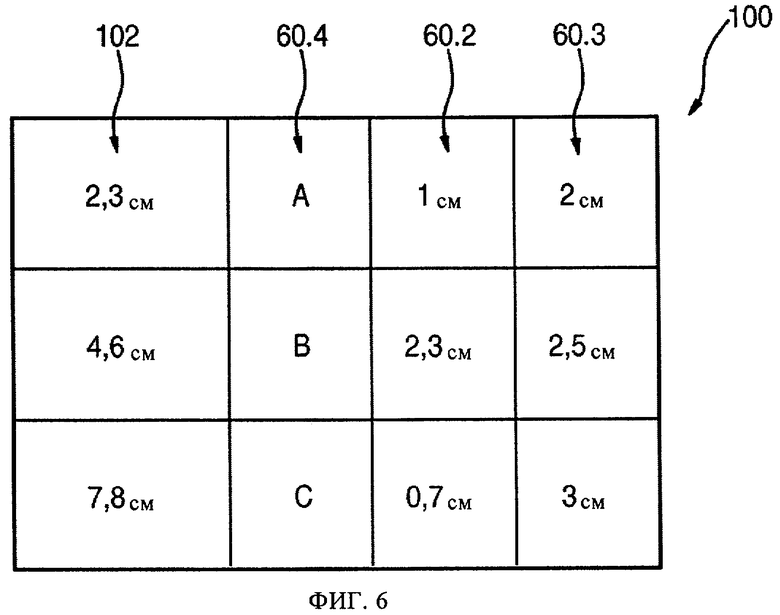
на фиг.6 - созданная детектором база данных.
Осуществление изобретения
На фиг.1 показан детектор 10, содержащий корпус 12, выполненный в виде оболочки для размещения внутренних компонентов. Он приложен к исследуемому объекту 14, выполненному в виде стены. На корпусе 12 закреплена рукоятка 16, за которую детектор 10 может держать оператор. На лицевой стороне 18 корпуса 12 размещены устройство 20 вывода для вывода информации оператору и устройство 22 ввода для ввода информации оператором, имеющее группу кнопок управления. Устройство 20 вывода содержит блок 24 индикации, выполненный в виде жидкокристаллического дисплея (индикатора). Устройство 20 вывода во время работы детектора управляется устройством 26 управления. Кроме того, на корпусе 12 установлены направляющие средства 28, выполненные в виде четырех колес, которые в показанном положении прилегают к поверхности 30 исследуемого объекта 14. В области боковых поверхностей 32 и 34 корпуса 12 расположено по два таких направляющих средства 28, которые ориентированы перпендикулярно направлению главной протяженности корпуса 12, представленному его центральной осью 36. Направляющие средства 28 попарно соединены осями 38 и 40. Оси 38, 40 проходят в направлении главной протяженности корпуса 12 по обе стороны от центральной оси 36. Направляющие средства 28 служат для направленного перемещения корпуса 12 в направлении 42 перемещения параллельно поверхности 30 исследуемого объекта 14. Направление 42 перемещения ориентировано перпендикулярно направлению главной протяженности корпуса 12.
При перемещении корпуса 12 оператором детектор может сканировать, или зондировать, исследуемый объект 14 для обнаружения и определения положения скрытых объектов, которые расположены под поверхностью 30 и невидимы, например, скрытого объекта 44. Для этого детектор 10 имеет детекторное устройство 46, расположенное под блоком 24 индикации и показанное на фиг.2. Взаимодействие устройства 26 управления с детекторным устройством 46 и устройством 20 вывода более подробно рассмотрено на фиг.2. Детекторное устройство 46 содержит излучатель для излучения измерительного сигнала 48 в форме, например, радиолокационного сигнала, сверхширокополосного сигнала, индуктивного или емкостного измерительного поля, приемник для приема измерительного сигнала 48 после его взаимодействия с исследуемым объектом 14 и блок обработки (на чертежах не показан) для анализа измерительного сигнала 48.
Детектор 10 может также выводить информацию о совершаемом оператором перемещении корпуса 12 относительно исследуемого объекта 14. Для этого детектор 10 содержит измерительное устройство 50 с двумя измерительными преобразователями 52, выполненными в виде датчиков перемещения. Каждый измерительный преобразователь 52 связан с одной из осей 38, 40 (см. фиг.1). Измерительные преобразователи 52 имеют зубчатое колесо, закрепленное на участке соответствующей оси 38, 40, по меньшей мере один излучатель для генерирования светового луча и приемник (на чертеже не показан) для приема светового луча. Каждый измерительный преобразователь 52 регистрирует по принципу оптрона или фотоэлектрического барьера параметр 54 движения, соответствующий приращению пути, определяемому по вращению зубчатого колеса, вызванному перемещением корпуса 12. Этот принцип известен и в рамках данного описания более подробно не поясняется.
На основании этого параметра 54 движения, передаваемого в виде электрического сигнала в устройство 26 управления, можно получить информацию о перемещении корпуса 12. В частности, посредством устройства 26 управления можно определять пройденный корпусом 12 отрезок пути и/или направление его движения. При этом благодаря регистрации двух параметров движения, выполняемой в случае двух независимых друг от друга осей 38, 40, можно достичь повышенной точности определения пройденного пути. Можно, например, исправлять ошибки, возникающие, например, из-за нелинейностей, обусловленных структурой поверхности 30.
Допустим, что оператор выполняет сканирование исследуемого объекта 14. Для этого он помещает детектор 10 на край 56 исследуемого объекта 14, соответствующий, например, углу стены, и перемещает его в направлении 42 перемещения на расстояние 58, представляющее собой длину пути. В показанном на фиг.1 положении детектора 10 детекторным устройством 46 обнаружен скрытый объект 44 в исследуемом объекте 14. При этом детекторное устройство 46 после анализа измерительного сигнала 48 выводит информацию 60 о результатах исследования, в частности положение 60.1 центра скрытого объекта 44 относительно корпуса 12, ширину 60.2 скрытого объекта 44 и глубину 60.3 залегания скрытого объекта 44 в исследуемом объекте 14, которая отображается блоком 24 индикации в виде символа 62 скрытого объекта. На основе информации 60 о результатах исследования устройство 26 управления формирует управляющий сигнал 64 для управления работой устройства 20 вывода, в результате чего на дисплей выводится символ 62 скрытого объекта. Кроме того, в рассматриваемом варианте осуществления изобретения на дисплей выводится еще один символ 63, который соответствует центральной оси 36 корпуса 12 и обеспечивает особенно простую возможность восприятия оператором положения скрытого объекта 44 относительно центральной оси 36. В представленном примере центр скрытого объекта находится на центральной оси 36. В другом варианте для изображения символа 63 на корпусе 12 на краю блока 24 индикации также может быть нанесена метка.
При перемещении детектора 10 в положение, показанное на фиг.1, измерительным устройством 50 во время движения детектора регистрируются параметры 54 движения, соответствующие приращению пути направляющих средств 28. Параметры 54 движения передаются в устройство 26 управления. На основе этих параметров 54 движения устройство 26 управления формирует управляющий сигнал 66, по которому визуальное представление обнаруженного скрытого объекта 44 блоком 24 индикации приводится в соответствие с текущим положением скрытого объекта 44 относительно корпуса 12. При этом символ 62 скрытого объекта перемещается в пределах блока 24 индикации, выполненного в виде жидкокристаллического дисплея, соответственно зафиксированному приращению пути. Для этого выбирается определенный коэффициент корреляции, при котором измеренный путь, например 1 см, соответствует определенному числу пикселей блока 24 индикации. Это позволяет изображать в масштабе исследуемый объект 14, а при необходимости - и скрытые объекты. Например, можно отобразить область исследуемого объекта 14, выходящую за пределы ширины корпуса 12. В частности, на блок 24 индикации можно в масштабе выводить изображение всего исследуемого объекта 14. Кроме того, можно также индицировать символы, ширина которых на блоке 24 индикации соответствует реальной ширине соответствующего обнаруженного скрытого объекта. Это позволяет выводить на дисплей точное по размерам изображение области исследуемого объекта 14, закрытой по меньшей мере отдельным участком поверхности корпуса 12. Коэффициент корреляции, определяющий соотношение между числом пикселей и путем детектора, может быть задан при изготовлении детектора или же - в предпочтительном случае - может устанавливаться оператором в эксплуатации.
Кроме того, устройство 26 управления определяет расстояние 58, соответствующее пройденному корпусом 12 пути, в единицах измерения, установленных оператором или производителем, в данном примере в сантиметрах. В рассматриваемом примере детектор 10 работает в режиме, в котором расстояния определяются относительно центральной оси 36 корпуса 12. При этом устройство 26 управления складывает половину ширины корпуса 12 и полученное расстояние 58, в результате чего получают значение 68 расстояния, соответствующее расстоянию 70 между начальной точкой пройденного отрезка пути, в данном случае краем 56 объекта, и центральной осью 36. Это значение 68 расстояния и электрический управляющий сигнал 72 подаются в устройство 20 вывода. Управляющий сигнал 72 управляет индикацией значения 68 расстояния посредством цифрового символа и символа 74 единицы измерения. В других режимах, в отличие от рассмотренного выше, значение 68 расстояния можно определять относительно граней 76, 78 корпуса 12. Если, например, привязать измерение к грани 76, то отображаемое значение 68 расстояния будет соответствовать пройденному расстоянию 58. Применяемая единица измерения, например миллиметры, сантиметры, метры и т.д., может задаваться оператором с помощью устройства 22 ввода и отображаемой блоком 24 индикации поверхности управления. Индикация единицы измерения может осуществляться посредством символа 74 единицы измерения, и/или может отображаться шкала с определенными единицей измерения делениями, при этом определить значение 68 расстояния можно, сравнив символ 62 скрытого объекта со шкалой. Предусмотрена также опция настройки режима, отменяющая индикацию единицы измерения, что высвобождает место для отображения другой информации, в частности сведений о результатах исследования объекта. Значение 68 расстояния может также отображаться только по желанию оператора, например, при вводе соответствующей команды с помощью устройства 22 ввода. В автоматическом режиме значение 68 расстояния отображается непрерывно, вследствие чего во время перемещения корпуса 12 детектор может постоянно информировать оператора о пройденном расстоянии 58. Для этого осуществляемое устройством 26 управления обновление, или актуализация, выводимого значения 68 расстояния непрерывно соотносится с изменением во времени параметров 54 движения. Еще одна опция настройки режима предусматривает возможность соотнесения высвечивания на дисплее значения 68 расстояния с началом перемещения детектора 10.
Далее, оператор может информироваться о расстоянии, на котором обнаруженный скрытый объект 44 находится относительно края 56 исследуемого объекта или другой заданной оператором точки отсчета. Это особенно просто реализовать, обеспечивая непрерывную индикацию значения 68 расстояния и символа 63. В примере, представленном на фиг.1, показываемое значение 68 расстояния соответствует расстоянию от центра скрытого объекта 44 до края 56, т.е. расстоянию 70, поскольку центр скрытого объекта 44 расположен на центральной оси 36. Кроме того, перемещая корпус 12 из показанного положения влево или вправо, можно легко определить расстояние между левым и правым краем скрытого объекта 44 и краем 56 исследуемого объекта 14. При этом символ 62, соответствующий скрытому объекту 44, перемещается в пределах блока 24 индикации соответственно. Корпус 12 перемещают до тех пор, пока символ 63 не совпадет с левым или правым краем символа 62 скрытого объекта. В этом случае значение 68 расстояния соответствует искомому расстоянию. Вместо непрерывной индикации значения 68 расстояния или в дополнение к ней можно по выбору оператора в любое время показать расстояние от скрытого объекта 44 до края 56 исследуемого объекта, отсчитываемое от левого или правого края скрытого объекта 44 или от его центра.
Еще один режим работы детектора предусматривает возможность индикации значения 80 расстояния, соответствующего расстоянию 82 между двумя обнаруженными скрытыми объектами. Эта возможность показана на фиг.3. Допустим, что оператор перемещает детектор 10 из положения, показанного на фиг.1, дальше в направлении 42 перемещения. Детектор обнаруживает еще один скрытый объект 84, о чем сигнализирует появление на дисплее еще одного символа 86 скрытого объекта. Одновременно с отображением символа 86 скрытого объекта индицируется значение 80 расстояния, характеризующее расстояние 82 между скрытыми объектами 44, 84, в определенных единицах измерения. Это происходит за счет того, что при обнаружении первого скрытого объекта 44 устройство 26 управления на основании соответствующей информации 60 о результатах исследования, соответствующей обнаружению первого скрытого объекта 44, задает точку отсчета для определения расстояния 82. В этом случае длина пути, пройденного корпусом 12 при его перемещении, непрерывно определяется устройством 26 управления на основании параметров 54 движения, пока не будет обнаружен второй скрытый объект 84. При обнаружении второго скрытого объекта 84 определение длины пути прекращается. На основании этой длины пути и информации 60 о результатах исследования, в частности ширины соответствующих обнаруженных скрытых объектов 44, 84, можно определить расстояние 82. Это расстояние 82 между скрытыми объектами 44, 84 в данном примере является расстоянием между обращенными друг к другу краями соответствующих скрытых объектов. В другом варианте можно определять расстояние между центрами скрытых объектов. После определения расстояния 82 устройством 26 управления формируется управляющий сигнал для индикации расстояния 82 в виде значения 80 расстояния и соответствующей единицы измерения.
Точка отсчета для определения еще одного значения 88 расстояния в другом режиме работы может быть задана оператором независимо от обнаружения скрытого объекта. Эта возможность представлена на фиг.4. Если корпус 12, в частности его центральная ось 36 или грани 76, 78, находится в положении, соответствующем, например, положению точки сверления, оператор, воздействуя на устройство 22 ввода, может задать точку 90 отсчета (на чертеже схематически представлена крестиком). Относительно этой точки 90 отсчета при перемещении корпуса 12 в направлении 42 перемещения определяется и непрерывно отображается на дисплее значение 88 расстояния, соответствующее расстоянию 92 между точкой 90 отсчета и центральной осью 36 корпуса. Этот режим позволяет, в частности, отказаться от применения дополнительного измерительного устройства, например измерительной линейки, для измерения расстояния 92. Точку 90 отсчета можно задавать, не прерывая для этого процесс измерения, выполняемого детекторным устройством.
Еще один режим работы детектора рассматривается на фиг.5. В этом режиме оператор с помощью устройства 22 ввода и поверхности управления, отображаемой блоком 24 индикации, вводит определенное расстояние 94, представляющее собой длину пути, на который детектор нужно переместить в направлении 42 перемещения для достижения требуемого рабочего положения 96, например, точки сверления. В этом случае устройство 26 управления задает текущее положение корпуса 12, показанное на фиг.5, в частности его центральную ось 36, в качестве точки отсчета, или опорной точки. При перемещении корпуса 12 на основании параметров 54 движения регистрируется пройденный путь, который сравнивается с расстоянием 94, что позволяет определить длину оставшегося отрезка пути в виде значения 98 расстояния, которое отображается на дисплее. При достижении требуемого рабочего положения 96, а именно когда рабочее положение 96 окажется на центральной оси 36, может быть выдан оптический сигнал, например, путем включения светового индикатора или соответствующей индикации на блоке 24 индикации, и/или звуковой сигнал. При перемещении корпуса 12 может отображаться длина оставшегося отрезка пути. В рассматриваемом примере требуемое положение, как возможный вариант, может быть таким, чтобы рабочее положение 96 примыкало к грани 78 корпуса. При этом, как описано выше, вводится расстояние 94 между центральной осью 36 и рабочим положением 96, причем расстояние 94 отличается от пути, на которое нужно переместить корпус 12, на половину ширины корпуса 12.
Кроме того, детектор 10 имеет режим протоколирования, показанный на фиг.2 и 6. В этом режиме, в частности, создается база 100 данных, в которой информация о расстоянии, получаемая устройством 26 управления на основании параметров 54 движения, соотнесена с информацией 60 о результатах исследования. Эта база 100 данных представлена на фиг.6. В левом столбце записывается соответствующая информация о расстоянии, в частности определенное положение объекта на поверхности 30 в виде значения 102 расстояния с указанием размерности. Это значение 102 расстояния предпочтительно определять от кромки исследуемого объекта 14 в направлении 42 перемещения, но также его можно определять от заданной оператором точки отсчета. Со значением 102 расстояния соотносят информацию 60 о результатах исследования, в частности тип 60.4 обнаруженного скрытого объекта, обозначенный буквой на чертеже буквой, глубину 60.3 его залегания в исследуемом объекте 14, его ширину 60.2 и т.д. Приведенные на чертеже значения выступают в качестве примера для пояснения. Кроме того, со значением 102 расстояния может быть соотнесена информация "скрытых объектов не найдено". Эта база данных характеризует топографию исследуемого объекта 14 и позволяет сделать заключение о состоянии подлежащего обработке исследуемого объекта 14. По базе 100 данных можно легко найти определенное место исследуемого объекта 14, причем можно определить, имеется ли в этом месте исследуемого объекта 14 скрытый объект. Также можно проводить поиск в отношении определенного скрытого объекта, такого, например, как электропроводка, причем можно установить, в каком месте или каких местах исследуемого объекта 14 находится такой скрытый объект.
База 100 данных может сохраняться при работе с детектором 10 в его запоминающем устройстве 104 (фиг.1 и 2). База 100 данных составляется устройством 26 управления при перемещении корпуса 12 на основании параметров 54 движения и информации 60 о результатах исследования. После выполнения измерения база 100 данных может быть передана во внешнее устройство 106 обработки данных. В рассматриваемом примере устройство 106 обработки данных выполнено в виде карманного компьютера (персонального цифрового ассистента). В другом варианте устройство обработки данных может быть выполнено в виде ноутбука или мобильного телефона. Для установления связи с устройством 106 обработки данных устройство 20 вывода снабжено интерфейсом 108 (см. также фиг.1 и 2), которое выполнено в виде интерфейса связи по технологии Bluetooth. Bluetooth - это промышленный стандарт IEEE 802.15.1, разработанный Институтом инженеров по электротехнике и радиоэлектронике на беспроводную (радио)связь между устройствами на коротком расстоянии. Вместо этого интерфейс может быть выполнен в виде интерфейса передачи данных по инфракрасной технологии. Кроме того, возможно применение интерфейса для передачи данных по кабелю, например интерфейса универсальной последовательной шины (USB). После выполнения измерения по выбору оператора данные могут быть переданы в базу 100 данных. Возможно применение режима протоколирования, в котором значение 102 расстояния и информация 60 о результатах исследования без промежуточного сохранения в запоминающем устройстве 104 передаются в устройство 106 обработки данных, причем база 100 данных создается во внутренней памяти устройства 106 обработки данных. Эта передача данных осуществляется каждый раз с помощью интерфейса 108 в соединении с устройством 26 управления.
Создание базы 100 данных может выполняться непрерывно при сканировании исследуемого объекта 14, при этом каждому положению поверхности 30 ставится в соответствие информация 60 о результатах исследования, или же занесение данных в базу 100 данных может происходить при обнаружении скрытого объекта.
Детектор 10 также имеет режим калибровки, в котором устройство 26 управления, в частности, калибруется для определения размерных значений 68, 80, 88, 98 расстояния на основании параметров 54 движения. В этом режиме корпус 12 перемещают на известное оператору расстояние, которое может быть введено с помощью устройства 22 ввода. В другом варианте детектор 10 может быть сконструирован таким образом, чтобы независимо от типа поверхности 30, силы прижатия, прикладываемой оператором к корпусу 12, износа направляющих средств 28, скорости перемещения и т.д. определять для некоторого отрезка пути одно и то же значение расстояния.
Описанные выше режимы работы, а также другие программы для настройки детектора 10 и взаимодействия устройства 26 управления с подключенными к нему устройствами, например, программы для обработки параметров 54 движения и информации 60 о результатах исследования, а также для формирования управляющих сигналов 64, 66, 72, хранятся в запоминающем устройстве 110 устройства 26 управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ОСНОВЫ ВДОЛЬ РАЗДЕЛИТЕЛЬНОЙ ЛИНИИ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2012 |
|
RU2629505C2 |
| Система досмотра транспортных средств, перемещающихся своим ходом, включая находящихся в транспортных средствах грузы, пассажиров и водителя, способ автоматического радиоскопического контроля движущихся объектов и зоны радиационного сканирования и способ формирования теневого изображения инспектируемого объекта | 2018 |
|
RU2716039C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ВЫСТРЕЛОВ, СПОСОБ ПОСТАНОВКИ АЭРОЗОЛЬНЫХ МАСОК-ПОМЕХ НАД КОЛОННАМИ И ГРУППАМИ ПОДВИЖНОЙ ТЕХНИКИ ИЛИ ДЛИННОМЕРНЫМИ ОБЪЕКТАМИ И КОМПЛЕКТ АППАРАТУРЫ ОПТИКО-ЭЛЕКТРОННОЙ РАЗВЕДКИ И ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2495358C2 |
| МОБИЛЬНОЕ АВТОНОМНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ СКРЫТЫХ ОПАСНЫХ ВЕЩЕСТВ ПОД ВОДОЙ | 2014 |
|
RU2571885C1 |
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ОБЪЕКТА ПРОВЕРКИ | 2003 |
|
RU2334219C2 |
| ДОСМОТРОВЫЙ РЕНТГЕНОВСКИЙ КОМПЛЕКС | 2012 |
|
RU2497104C1 |
| СИСТЕМА ПОЗИТРОН-ЭМИССИОННОЙ ТОМОГРАФИИ | 2005 |
|
RU2381525C2 |
| СПОСОБ ПРОВЕРКИ СВОЙСТВ ОБЪЕКТА В ОСНОВЕ | 2015 |
|
RU2673368C1 |
| ДАЛЬНОМЕР | 2007 |
|
RU2463553C2 |
| РАДИОГРАФИЧЕСКОЕ УСТРОЙСТВО | 2003 |
|
RU2312327C2 |
Изобретение относится к детектору для обнаружения и определения положения скрытых объектов в исследуемом объекте. Сущность изобретения заключается в том, что ручной детектор для обнаружения и определения положения скрытых объектов (44, 84) в исследуемом объекте (14), содержащий корпус (12), направляющее средство (28), установленное на корпусе (12) для обеспечения направленного перемещения детектора вдоль исследуемого объекта (14) по меньшей мере в одном направлении (42) перемещения, измерительное устройство (50) для регистрации по меньшей мере одного параметра (54) движения при перемещении корпуса (12), устройство (26) управления и устройство (20) вывода для вывода информации оператору, при этом устройство (20) вывода расположено на лицевой стороне (18) корпуса (12) и выполнено в виде цифрового дисплея, а устройство (26) управления в сочетании с устройством (20) вывода выполнено с возможностью вывода по меньшей мере одного размерного значения (88) расстояния, определяемого в направлении (42) перемещения, в виде формируемого электронными средствами цифрового символа, и с возможностью обновления выводимого значения (88) расстояния, осуществляемого по меньшей мере в основном синхронно с изменением параметра (54) движения, причем ручной детектор дополнительно содержит устройство (22) ввода и имеет режим ввода с возможностью задания посредством устройства (22) ввода точки (90) отсчета, относительно которой определяется значение (88) расстояния, причем задание точки (90) отсчета возможно без прерывания процесса обнаружения и определения положения скрытых объектов. Технический результат - повышение удобства управления устройством, повышение скорости и удобства разметки исследуемого объекта одновременно с выявлением в нем скрытых объектов и определением их местоположения. 5 з.п. ф-лы, 6 ил.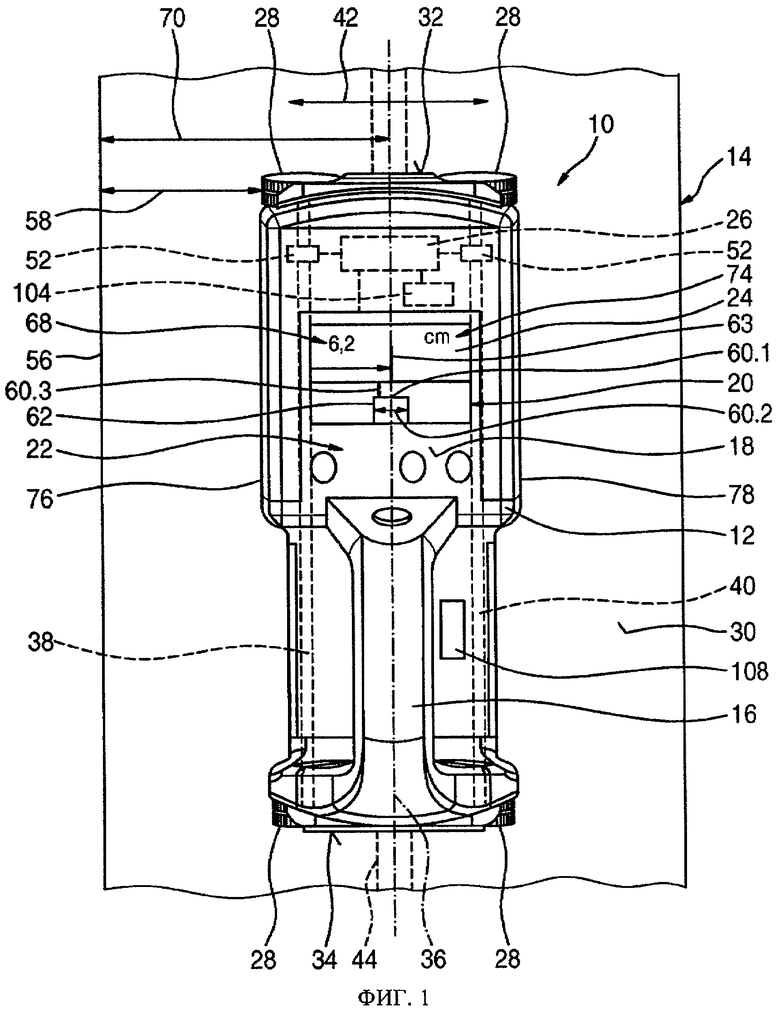
1. Ручной детектор для обнаружения и определения положения скрытых объектов (44, 84) в исследуемом объекте (14), содержащий корпус (12), направляющее средство (28), установленное на корпусе (12) для обеспечения направленного перемещения детектора вдоль исследуемого объекта (14) по меньшей мере в одном направлении (42) перемещения, измерительное устройство (50) для регистрации по меньшей мере одного параметра (54) движения при перемещении корпуса (12), устройство (26) управления и устройство (20) вывода для вывода информации оператору, отличающийся тем, что устройство (20) вывода расположено на лицевой стороне (18) корпуса (12) и выполнено в виде цифрового дисплея, а устройство (26) управления в сочетании с устройством (20) вывода выполнено с возможностью вывода по меньшей мере одного размерного значения (88) расстояния, определяемого в направлении (42) перемещения, в виде формируемого электронными средствами цифрового символа, и с возможностью обновления выводимого значения (88) расстояния, осуществляемого по меньшей мере в основном синхронно с изменением параметра (54) движения, причем ручной детектор дополнительно содержит устройство (22) ввода и имеет режим ввода с возможностью задания посредством устройства (22) ввода точки (90) отсчета, относительно которой определяется значение (88) расстояния, причем задание точки (90) отсчета возможно без прерывания процесса обнаружения и определения положения скрытых объектов.
2. Ручной детектор по п.1, отличающийся тем, что для обнаружения и определения положения скрытых объектов он содержит детекторное устройство (46), выполненное с возможностью сбора информации (60) о результатах исследования исследуемого объекта (14), и имеет режим протоколирования для составления базы (100) данных, в которой информация (60) о результатах исследования соотнесена со значением (102) расстояния.
3. Ручной детектор по п.1 или 2, отличающийся тем, что он дополнительно содержит запоминающее устройство (104) для хранения по меньшей мере базы (100) данных.
4. Ручной детектор по п.1 или 2, отличающийся тем, что устройство (20) вывода имеет интерфейс (108) для выдачи по меньшей мере значения (102) расстояния во внешнее по отношению к корпусу (12) устройство (106) обработки данных.
5. Ручной детектор по п.1 или 2, отличающийся тем, что он дополнительно имеет режим ввода с возможностью ввода расстояния (94), задающего путь, на который необходимо переместить корпус (12).
6. Ручной детектор по п.1 или 2, отличающийся тем, что для обнаружения и определения положения скрытых объектов он содержит детекторное устройство (46), выполненное с возможностью сбора информации (60) о результатах исследования исследуемого объекта (14), причем устройство (26) управления выполнено с возможностью задания точки отсчета для определения значения (80) расстояния на основании информации (60) о результатах исследования в по меньшей мере частично автоматическом режиме.
| US 6119526 А, 19.09.2000 | |||
| US 2003012411 А1, 16.01.2003 | |||
| Устройство для наземных электроразведочных работ в движении | 1982 |
|
SU1038911A1 |

