Область техники
Настоящее изобретение касается способа проверки свойств объекта в основе согласно ограничительной части пункта 1 формулы изобретения.
Уровень техники
Из DE 202010016564 U1 известно оборудование для обнаружения объектов в основе. Оборудование содержит детекторное устройство, локационное устройство и контрольное устройство. Пользователь перемещает детекторное устройство над поверхностью раздела, при этом детекторное устройство выполняет ряд измерений. В процессе измерений локационное устройство регулярно определяет текущее положение детекторного устройства. Данные измерений с детекторного устройства и данные о положении с локационное устройство передают на контрольное устройство, которое ставит данные измерений и положения в соответствие друг другу и сохраняет их. Данные измерений и позиционирования могут проходить дальнейшую обработку в контрольном устройстве и отображаться, например, на экране.
Представление изобретения
Задача настоящего изобретения состоит в разработке способа проверки свойств объекта в основе.
Эту задачу согласно изобретению решают с помощью упомянутого в начале способа проверки свойств объекта посредством признаков независимого пункта 1 формулы изобретения. Предпочтительные усовершенствования представлены в зависимых пунктах формулы изобретения.
Согласно изобретению способ проверки свойств объекта в основе с помощью оборудования, имеющего детекторное устройство, локационное устройство и контрольное устройство, отличается тем, что:
- на первом этапе выбирают первый объект по меньшей мере с одним подлежащим проверке свойством и первыми заданными координатами,
- на втором этапе с помощью локационного устройства определяют текущее положение детекторного устройства в пространстве,
- на третьем этапе контрольным устройством, исходя из текущего положения детекторного устройства, определяется текущее поле детектирования и
- на четвертом этапе контрольным устройством сравниваются первые заданные координаты с текущим полем детектирования детекторного устройства.
Способ согласно изобретению осуществляет проверку свойств некоторого известного объекта посредством детекторного устройства. Термин "объект" охватывает все элементы, расположенные в основе. Примеры объектов, которые определяют с помощью детекторного устройства, это электропровода, провода радиосети, полые трубы, водопроводные трубы и трубы системы отопления, а также арматурные стержни. В случае водопроводной трубы к числу свойств объекта, которые можно проверить, относятся, например, материал (медь или пластмасса), диаметр, положение и применение в качестве трубопровода для горячей или холодной воды. Если речь идет об электропроводе, то свойства объекта, которые можно проверить посредством детекторного устройства, это в том числе материал, расстояние до проводов другого вида и положение относительно них и применение в качестве силового или слаботочного кабеля. При введении арматурных стержней в бетонные перекрытия можно проверить, было ли встроено указанное количество армирующих стержней и соблюдаются ли оптимальные на нынешнем уровне техники промежутки между армирующими стержнями.
Необходимое условие для реализации способа согласно изобретению состоит в том, чтобы были известны заданные координаты объекта, подлежащего проверке. Заданные координаты могут быть представлены в виде абсолютных координат или координат относительно некоторого ориентира. Особое значение для применения имеет возможность проверки данных инженерно-технической документации (плана строительства) с помощью способа согласно изобретению. В инженерно-технической документации указаны множество объектов со своими свойствами и заданными координатами. Инженерно-техническая документация должна быть изготовлена в форме, пригодной для считывания контрольным устройством, чтобы данные объекта можно было загружать непосредственно из инженерно-технической документации, иначе пользователю придется вручную вводить данные объекта в контрольное устройство.
На первом этапе реализации способа согласно изобретению выбирают подлежащий проверке первый объект с соответствующими первыми заданными координатами и задают подлежащие проверке свойства первого объекта. Прежде чем выполнять измерение с помощью детекторного устройства, необходимо в случае точечного детектора разместить детекторное устройство над первым объектом, а в случае сканирующего детектора - провести его над объектом. Для этого на втором этапе с помощью локационного устройства определяют текущее положение детекторного устройства в пространстве. Исходя из текущего положения детекторного устройства контрольное устройство на третьем этапе определяет текущее поле детектирования детекторного устройства; связь между текущим положением и полем детектирования детекторного устройства известна. В случае сканирующего детектора поле детектирования соответствует локальной области сканирования вокруг объекта. Затем на четвертом этапе способа контрольное устройство сравнивает заданные координаты с текущим полем детектирования детекторного устройства.
Дальнейшие этапы реализации способа согласно изобретению зависят от сравнения первых заданных координат первого объекта с текущим полем детектирования детекторного устройства. При этом различают три варианта: в первом варианте первый объект расположен в пределах текущего поля детектирования, во втором варианте первый объект по меньшей мере частично располагается за пределами текущего поля детектирования, а в третьем варианте размеры первого объекта больше, чем текущее поле детектирования детекторного устройства.
В первом варианте реализации способа, если первые заданные координаты первого объекта расположены в пределах текущего поля детектирования, то посредством детекторного устройства выполняют как минимум одно измерение в основе. Способ согласно изобретению обладает тем преимуществом, что запуск измерения или серии измерений в основе посредством детекторного устройства происходит автоматически под управлением контрольного устройства.
Особо предпочтительно, чтобы измерение, проводимое детекторным устройством, выполнялось с параметрами детектирования, которые откорректированы соответственно подлежащим проверке свойствам первого объекта. Благодаря тому, что свойства первого объекта известны, параметры детектирования, с применением которых детекторное устройство выполняет одно или несколько измерений, можно откорректировать соответственно подлежащим проверке свойствам объекта. Измерение с откорректированными параметрами детектирования повышает точность и надежность результатов измерения.
Во втором варианте реализации способа, если заданные координаты первого объекта по меньшей мере частично располагаются за пределами текущего поля детектирования, контрольное устройство на основании текущего положения детекторного устройства и первых заданных координат первого объекта рассчитывает инструкцию по перемещению детекторного устройства, которая отображается на устройстве отображения. Во время перемещения детекторного устройства регулярно повторяются этапы способа согласно изобретению со второго по четвертый, пока первые заданные координаты первого объекта не окажутся расположены в пределах текущего поля детектирования детекторного устройства.
В третьем варианте реализации способа, если первые заданные координаты первого объекта частично расположены в пределах текущего детекторного поля, а размеры первого объекта больше, чем текущее детекторное поле, то контрольное устройство рассчитывает и отображает на устройстве отображения инструкцию по перемещению детекторного устройства, а во время движения выполняет посредством детекторного устройства ряд измерений в основе. Третий вариант имеет значение для объектов, размеры которых превосходят величину поля детектирования, как то, например, для электропроводов, водопроводных труб и арматурных стержней.
В предпочтительной форме исполнения способа контрольное устройство запускает измерения в основе посредством детекторного устройства и определение положения посредством локационного устройства одновременно. Благодаря одновременному запуску определения положения и измерения в основе локационное устройство и детекторное устройство синхронизируются. Поскольку продолжительность измерения для процессов определения положения с помощью локационного устройства и измерений в основе посредством детекторного устройства как правило различны, значения для положения и результаты измерений получают не одновременно. Благодаря синхронизации можно поставить полученные при измерениях значения для положения и результаты измерений в основе в соответствие друг другу. Чем ближе друг к другу во времени располагаются момент определения положения и измерений в основе, тем меньше ошибка системы координат.
В усовершенствованном варианте способ согласно изобретению дополнительно отличается тем, что на первом этапе кроме первого объекта выбирают второй объект с подлежащими проверке вторыми свойствами и вторыми заданными координатами, а на четвертом этапе помимо первых заданных координат первого объекта с текущим полем детектирования детекторного устройства сравнивают и вторые заданные координаты второго объекта. Усовершенствованный способ обладает тем преимуществом, что с помощью детекторного устройства можно проверить несколько объектов.
Дальнейшие этапы реализации способа согласно изобретению зависят от сравнения первых заданных координат первого объекта и вторых заданных координат второго объекта с текущим полем детектирования детекторного устройства. При этом различают три варианта: в первом варианте один из двух объектов расположен в пределах поля детектирования, во втором варианте оба объекта располагаются в пределах поля детектирования, в третьем варианте оба объекта располагаются за пределами поля детектирования.
В первом варианте, если первые заданные координаты первого объекта или вторые заданные координаты второго объекта расположены в пределах текущего поля детектирования детекторного устройства, то посредством детекторного устройства выполняют как минимум одно измерение в основе. При этом особо предпочтительно, чтобы по меньшей мере одно измерение выполнялось детекторным устройством с параметрами детектирования, которые откорректированы соответственно подлежащим проверке свойствам объекта, расположенного в пределах текущего поля детектирования. Измерение с откорректированными параметрами детектирования повышает точность и надежность результатов измерения, которые выдает детекторное устройство.
Особо предпочтительно, чтобы после измерения в основе с помощью детекторного устройства контрольное устройство на основании текущего положения детекторного устройства и заданных координат расположенного за пределами текущего поля детектирования объекта рассчитывало инструкцию по перемещению детекторного устройства и отображало ее на устройстве отображения. Во время перемещения детекторного устройства регулярно повторяются этапы способа согласно изобретению со второго по четвертый, пока и еще один объект не окажется в пределах текущего поля детектирования детекторного устройства и не будет возможно проведение измерения с помощью детекторного устройства.
Во втором варианте, если первые заданные координаты первого объекта и вторые заданные координаты второго объекта расположены в пределах текущего поля детектирования детекторного устройства, то посредством детекторного устройства выполняют как минимум одно измерение в основе.
Особо предпочтительно проводить посредством детекторного устройства первое измерение с первыми параметрами детектирования, которые согласованы соответственно с первыми свойствами первого объекта, а второе измерение - со вторыми параметрами детектирования, которые согласованы со вторыми свойствами второго объекта. У объектов с различными свойствами, например, различными материалами или глубиной расположения в основе, оптимальные параметры детектирования могут существенно отличаться друг от друга. Точность результатов измерений можно улучшить с помощью нескольких измерений с настроенными в каждом случае параметрами детектирования.
В третьем варианте на основании текущего положения детекторного устройства, а также первых заданных координат первого объекта и вторых заданных координат второго объекта, если первые заданные координаты первого объекта и вторые заданные координаты второго объекта расположены за пределами текущего поля детектирования детекторного устройства, контрольное устройство рассчитывает первое расстояние и второе расстояние. Первое расстояние представляет собой разность положения (координат) первого объекта и текущего положения детекторного устройства, а второе расстояние, соответственно - разность положения второго объекта и текущего положения детекторного устройства.
Особо предпочтительно, чтобы контрольное устройство сравнивало первое расстояние и второе расстояние между собой, и для объекта с меньшим расстоянием до текущего положения детекторного устройства контрольное устройство рассчитывало бы и отображало бы на устройстве отображения инструкцию по перемещению детекторного устройства.
В усовершенствованном варианте способ согласно изобретению дополнительно отличается тем, что на втором этапе с помощью локационного устройства помимо текущего положения детекторного устройства определяют текущую ориентацию детекторного устройства. Особо предпочтительно, чтобы на третьем этапе контрольное устройство определяло текущее поле детектирования детекторного устройства на основании текущего положения и текущей ориентации детекторного устройства. Определение текущей ориентации повышает точность, с которой можно определить направление детекторного устройства. Текущую ориентацию детекторного устройства можно определить, например, с помощью камеры или путем получения разности (положения) нескольких известных маркеров, нанесенных на детекторное устройство. Для этого годятся все известные методы для определения ориентации предмета в пространстве.
Предпочтительно, чтобы текущая ориентация детекторного устройства в пространстве дополнительно учитывалась на всех этапах способа согласно изобретению, которые используют текущее положение детекторного устройства.
Примеры исполнения
Ниже дано пояснение примеров исполнения изобретения на основании чертежа. Чертеж не обязательно отображает примеры исполнения строго масштабно, напротив, чертеж (там, где он служит пояснению) выполнен в схематическом и/или несколько искаженном виде. Что касается дополнений к положениям, непосредственно видимым из чертежа, то дана ссылка на соответствующий уровень техники. При этом следует учитывать, что возможны разнообразные модификации и изменения, касающиеся формы и подробностей формы исполнения, без отклонения от общей идеи изобретения. Признаки изобретения, изложенные в описании, в чертеже, а также в формуле изобретения, могут быть существенны для варианта исполнения изобретения как каждый по отдельности, так и в произвольном сочетании. Кроме того, изобретение охватывает все сочетания по меньшей мере двух признаков, изложенных в описании, чертеже и/или в формуле изобретения. Общая идея изобретения не ограничена точной формой или подробностями показанной и описанной ниже предпочтительной формы исполнения и не лимитирована предметом, который был бы более ограничен, чем заявленный в форме изобретения предмет. В случае указанных диапазонов параметров значения, лежащие в пределах названных границ, также следует считать изложением граничных значений, необходимо их произвольное применение и испрашивание. В целях простоты изложения ниже для идентичных или сходных деталей или же для деталей с идентичной или сходной функцией применяют одинаковые обозначения.
Представлены:
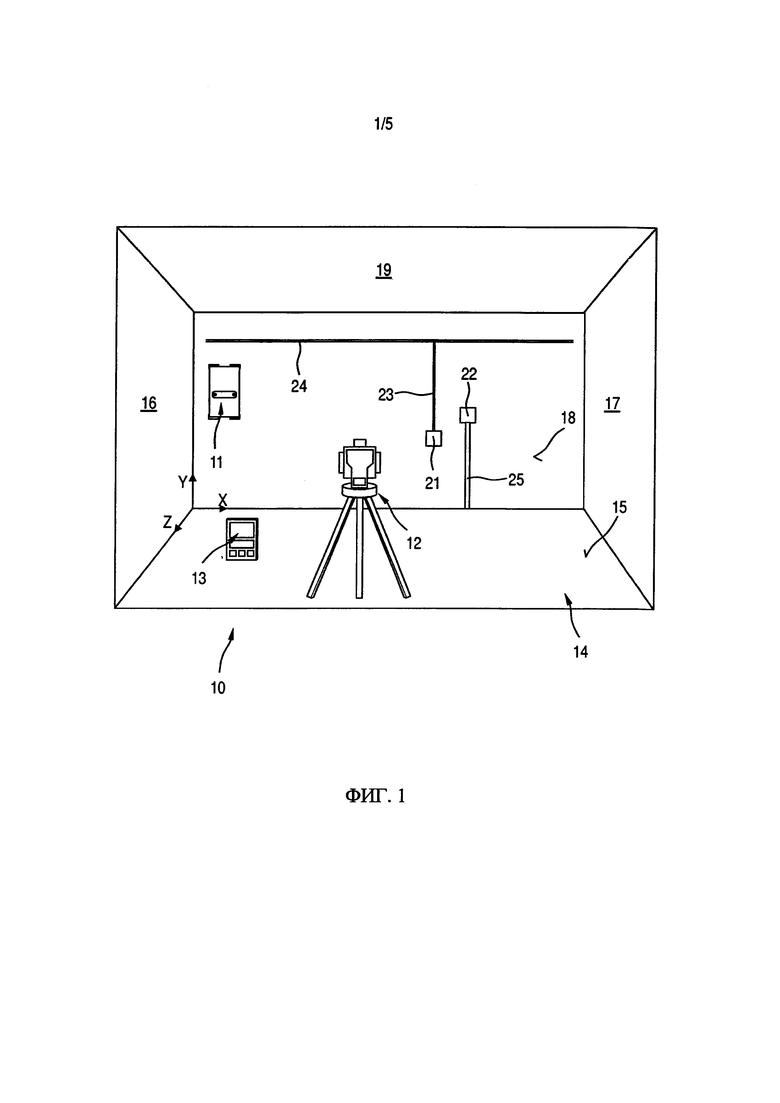
ФИГ. 1 применение устройства (аппаратуры) для проверки свойств объекта в основе с помощью детекторного устройства, локационного устройства и контрольного устройства;
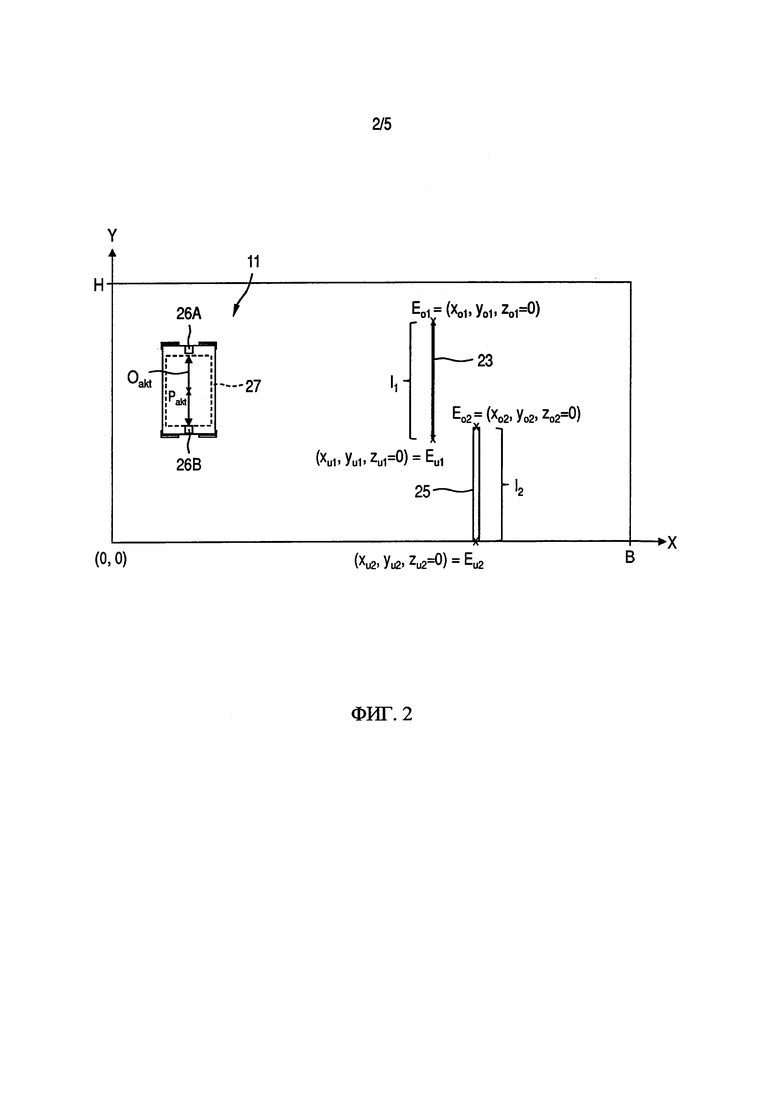
ФИГ. 2 задняя стенка внутреннего пространства ФИГ. 1 с подлежащим проверке первым объектом и подлежащим проверке вторым объектом;
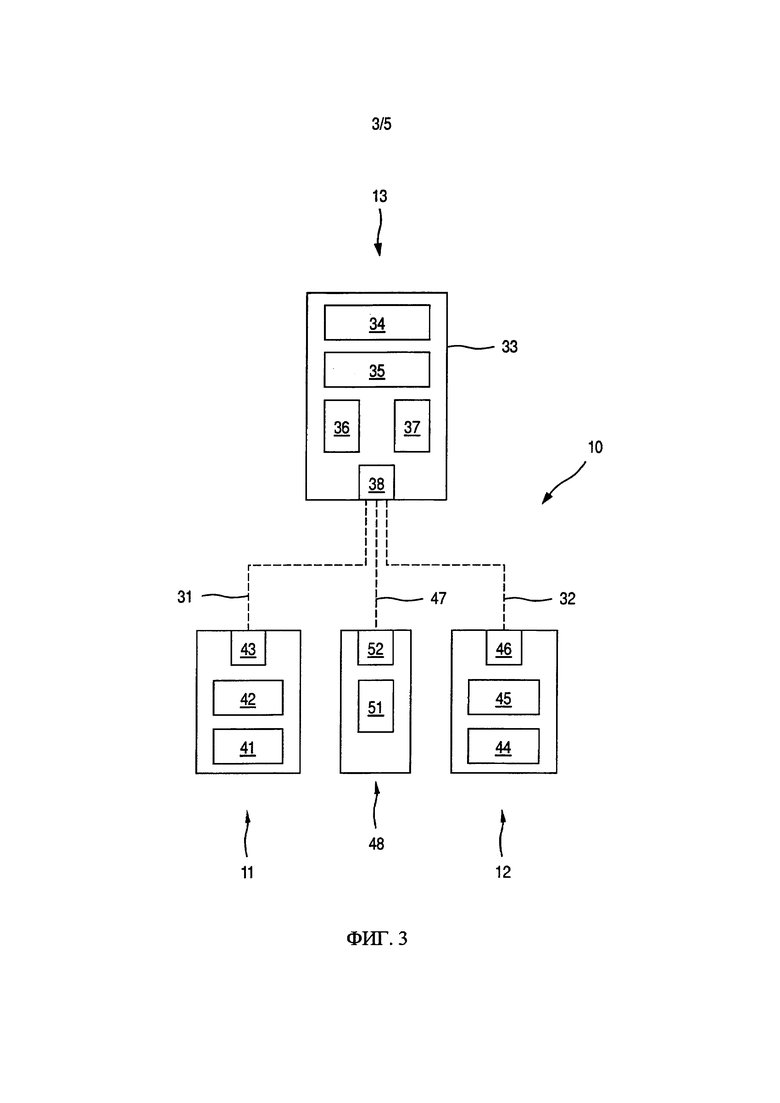
ФИГ. 3 взаимодействие детекторного устройства, локационного устройства и контрольного устройства аппаратуры, показанной на ФИГ. 1, в форме блок-диаграммы;
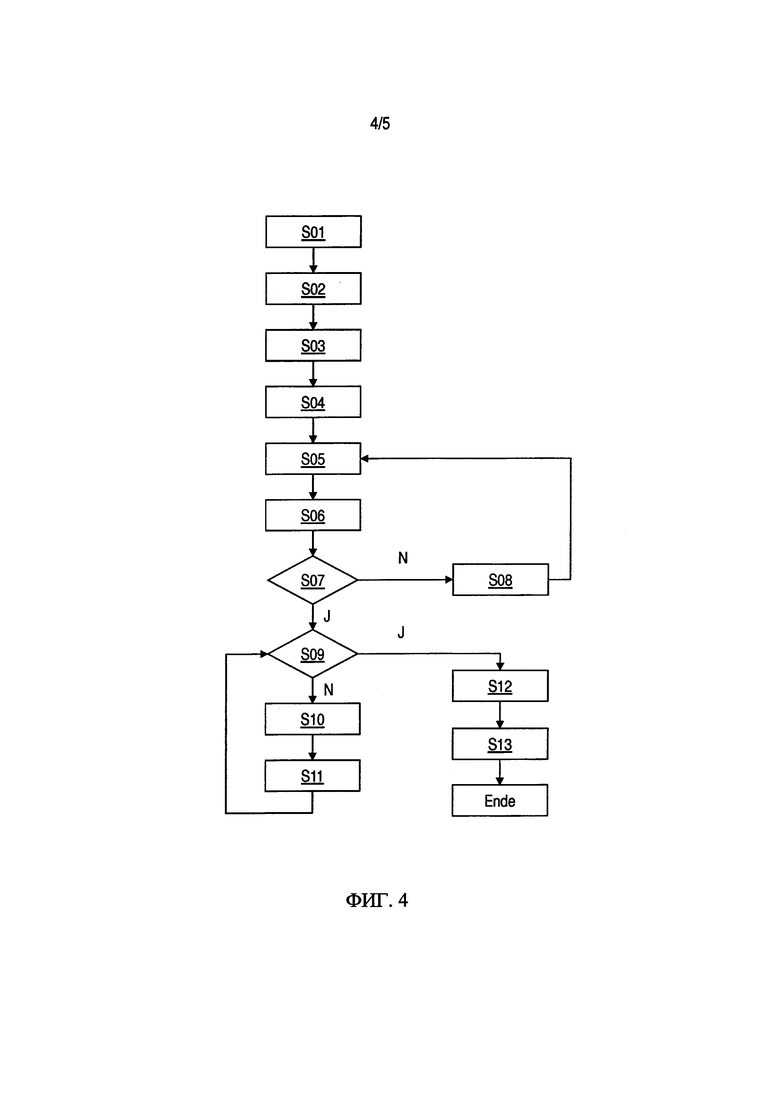
ФИГ. 4 первый вариант исполнения способа согласно изобретению для проверки свойств электропровода; и
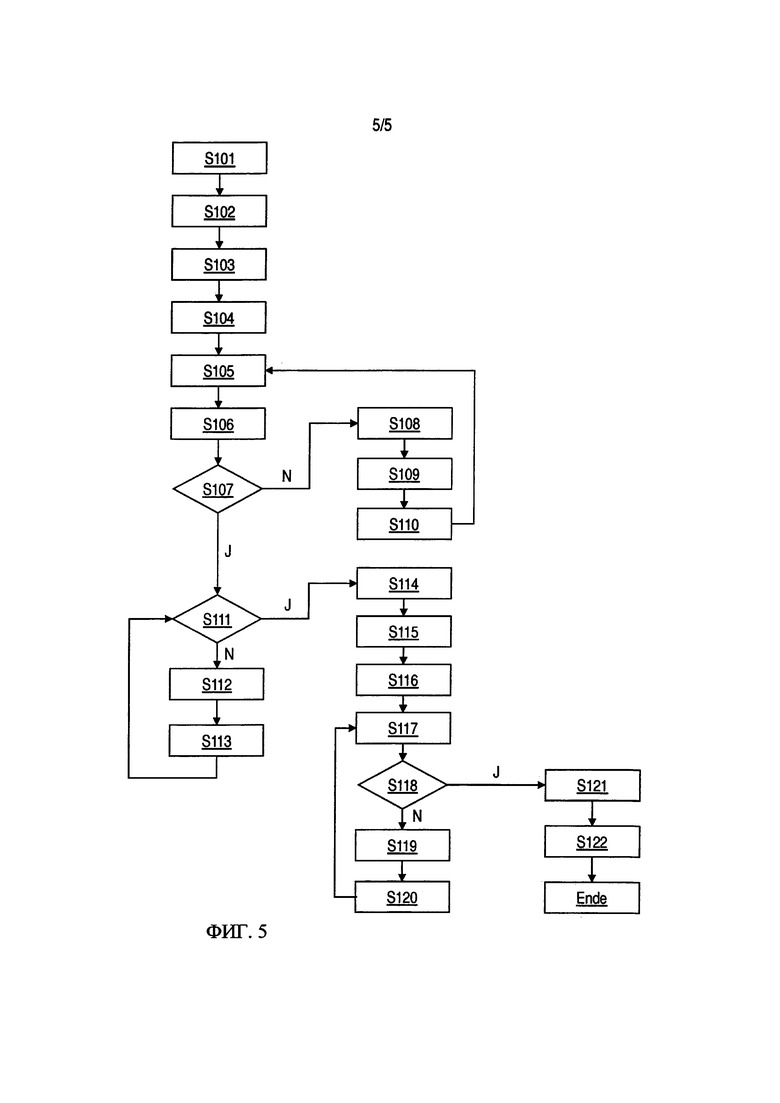
ФИГ. 5 второй вариант исполнения способа согласно изобретению для проверки свойств первого объекта, конструктивно выполненного как электропровод, и второго объекта, выполненного в виде водопроводной трубы.
ФИГ. 1 демонстрирует оборудование 10 для реализации способа проверки свойств объекта в основе согласно изобретению. Термин "объект" охватывает все элементы, расположенные в основе.
Оборудование 10 включает в себя детекторное устройство 11, локационное устройство 12 и контрольное устройство 13. Детекторное устройство 11, локационное устройство 12 и контрольное устройство 13 конструктивно выполнены как отдельные компоненты, которые можно соединять посредством коммуникационных линий, и которые могут обмениваться данными друг с другом. Контрольное устройство 13 может также, однако, быть интегрировано в детекторное устройство 11. Детекторное устройство 11 конструктивно выполнено как ручное детекторное устройство, которое во время измерения перемещают над основой.
В случае детекторного устройства различают удерживаемое и направляемое детекторные устройства: удерживаемое детекторное устройство во время измерения удерживают неподвижно над подлежащей детектированию основой, а направляемое детекторное устройство во время измерения проводят над подлежащей детектированию основой по линейной траектории или по какой-либо произвольной траектории. Удерживаемым вручную либо же, соответственно, направляемым вручную называют детекторное устройство, которое пользователь удерживает или проводит над подлежащей детектированию основой рукой. Конструктивное исполнение в виде удерживаемого или направляемого детекторного устройства зависит, в числе прочего, от размеров подлежащих проверке объектов; в случае объектов большой длины, например, электропроводов, водопроводных труб или арматурных стержней для полной регистрации объектов необходимо, как правило, выполнить несколько измерений.
Способ согласно изобретению описан на примере задачи измерения во внутреннем пространстве 14. Внутреннее пространство 14 состоит из пола 15, левой и правой боковой стенки 16, 17, задней стенки 18 и потолка 19. Границы 15-19 внутреннего пространства 14 объединены понятием "основа". К внутреннему пространству 14 привязана трехмерная система координат X, Y, Z, начальная точка (начало координат) которой (0, 0, 0) располагается в левом нижнем углу между полом 15, левой боковой стенкой 16 и задней стенкой 18. На задней стенке 18 предусмотрен кухонный гарнитур с электрооборудованием. Для снабжения электрооборудования необходимы разъем электропитания и подключение к водопроводу, которые расположены в задней стенке 18. Духовка с функцией паровой печки нуждается в разъеме электропитания 21 и подключении к водопроводу 22. Разъем электропитания 21 через вертикальный электропровод 23 соединен с проходящим горизонтально электропроводом 24, а подключение к водопроводу 22 обеспечено водопроводной трубой 25.
Для задачи измерения вертикальный электропровод 23 определяют как первый объект, а водопроводную трубу 25 - как второй объект. У электропровода 23 подлежащими проверке свойствами объекта, которые следует проверять посредством детекторного устройства 11, могут быть материал, расстояние до проводов другого вида и применение в качестве силового или слаботочного кабеля. В случае водопроводной трубы 25 к числу свойств объекта, которые можно проверить посредством детекторного устройства 11, относятся, например, материал (медь или пластмасса), диаметр, положение и применение в качестве трубопровода для горячей или холодной воды.
Необходимое условие для реализации способа согласно изобретению состоит в том, чтобы были известны заданные координаты объекта, подлежащего проверке. Заданные координаты могут содержаться, например, в инженерно-технической документации. Инженерно-технической документацией называют чертеж объекта строительства, на котором представлена вся информация, необходимая для изготовления объекта. Инженерно-техническая документация может в качестве общего плана охватывать все объекты внутреннего пространства 14 или же в качестве части плана содержать лишь некоторые объекты. Для работников различных специальностей, например, электрика, каменщика, монтажника в инженерно-технической документации имеют значение различные объекты и свойства объектов.
ФИГ. 2 изображает тыльную стенку 18 внутреннего пространства с подлежащим проверке первым объектом 23 и подлежащим проверке вторым объектом 25, которые расположены в тыльной стенке 18. Задняя стенка 18 лежит в плоскости XY системы координат и в направлении X имеет ширину В, а в направлении Y высотой Н.
Прежде чем детекторное устройство 11 выполнит измерение необходимо разместить детекторное устройство 11 над первым объектом 23, вторым объектом 25 или над первым и вторым объектом 23, 25. Для этого с помощью локационного устройства 12 определяют текущее положение Pakt с координатами xakt, yakt, zakt детекторного устройства 11 во внутреннем пространстве 14. Текущее положение Pakt детекторного устройства 11 определяют с помощью двух меток локализации 26А, 26В. В настоящем примере исполнения метки локализации 26А, 26В нанесены на верхнюю сторону детекторного устройства 11. Исходя из текущего положения детекторного устройства 11 контрольное устройство 13 определяет текущее поле детектирования 27 детекторного устройства 11. Между положением меток локализации 26А, 26В и полем детектирования 27 детекторного устройства 11 существует известная связь. Текущую ориентацию Oakt детекторного устройства 11 тоже можно определить с помощью меток локализации 26А, 26В.
После того как контрольным устройством 13 определено текущее поле детектирования 27 детекторного устройства, контрольным устройством 13 сравниваются заданные координаты объектов 23, 25 с текущим полем детектирования 27 детекторного устройства 11. Форма представления заданных координат объектов, подлежащих детектированию, может быть различной. В случае длинномерных (продолговатых) объектов, как то: электропровода 23 и водопроводной трубы 25 целесообразно задавать в качестве заданных координат как минимум одну конечную точку, длину объекта и ориентацию объекта. Электропровод 23 характеризуется верхней конечной точкой Eo1 с координатами xo1, yo1, zo1 и длиной h; как вертикальный электропровод он ориентирован параллельно направлению Y. Водопроводная труба 25 характеризуется верхней конечной точкой Еo2 с координатами хo2, yo2, zo2, длиной h и ориентацией параллельно направлению Y. В качестве альтернативы верхним конечным точкам Eo1, Ео2 объектов 23, 25 можно задать нижние конечные точки Eu1, Еu2.
ФИГ. 3 показывает конструкцию и взаимодействие детекторного устройства 11, локационного устройства 12 и контрольного устройства 13 в форме блок-диаграммы. Детекторное устройство 11, локационного устройство 12 и контрольное устройство 13 в примере исполнения конструктивно исполнены как отдельные компоненты, которые могут обмениваться данными друг с другом по линиям связи.
Детекторное устройство 11 и контрольное устройство 13 можно соединять друг с другом первым коммуникационным соединением 31. Вторым коммуникационным соединением 32 контрольное устройство 13 можно соединять с локационным устройством. Коммуникационные соединения могут быть конструктивно исполнены как беспроводные коммуникационные соединение, например, в виде радиосвязи, инфракрасного соединения, соединения Bluetooth, WLAN или Wi-Fi, или же в виде кабельного коммуникационного соединения. Помимо указанных технологий беспроводного соединения годятся все уже известные и перспективные технологии беспроводного соединения для передачи данных и изображений.
Контрольное устройство 13 содержит корпус 33, в который интегрированы пульт управления 34 и устройство отображения 35. Пульт управления 34 и устройство отображения 35 могут быть конструктивно выполнены в виде отдельных деталей, как это показано на ФИГ. 2, или же интегрированы друг с другом, например, в сенсорный экран (тачскрин). Контрольное устройство 13, кроме того, имеют элемент анализа и управления 36, элемент памяти 37 и первый элемент приема и передачи 38.
Детекторное устройство 11 включает в себя сенсорное устройство (датчик) 41, управляющий элемент 42 для управления сенсорным устройством 41 и второй элемент приема и передачи 43. С первого элемента приема и передачи 38 контрольного устройства 13 устанавливается первое коммуникационное соединение со вторым элементом приема и передачи 43 детекторного устройства 11. Управляющие команды для детекторного устройства 11 передаются с контрольного устройства 13 по первому коммуникационному соединению 31 на управляющий элемент 42 детекторного устройства 23. Сенсорное устройство имеет один единственный сенсорный элемент или несколько сенсорных элементов; сенсорные элементы могут быть конструктивно выполнены как индуктивные датчики, емкостные датчики, радиолокационные датчики, датчики магнитного поля или как иные датчики, пригодные для обнаружения объектов в основах.
Локационное устройство 12 включает в себя измерительное устройство 44, элемент управления и анализа 45 для управления измерительным устройством 44 и анализа результатов измерений, а также третий элемент приема и передачи 46. Устройство локализации 12 конструктивно выполнено, например, в виде тахеометра, а измерительное устройство 44 - как инструмент для измерения расстояний и углов. С первого элемента приема и передачи 38 контрольного устройства 13 устанавливается второе коммуникационное соединение 32 с третьим элементом приема и передачи 46 локационного устройства 12.
Инженерно-техническая документация может быть сохранена в элементе памяти 37 контрольного устройства 13. Контрольное устройство 13 может посредством третьего коммуникационного соединения 47 соединяться с центральным накопителем 48. Термин "центральный накопитель" ("центральный блок памяти") охватывает все электронные устройства, служащие для архивирования данных. К ним относятся, например, сервер, ноутбук, компьютер, внешний жесткий диск и карманный компьютер (PDA). По третьему коммуникационному соединению 47 инженерно-техническую документацию можно передать из центрального накопителя 48 на контрольное устройство 13 и сохранить его в элементе памяти 37, или же обработанную инженерно-техническую документацию передают с контрольного устройства 13 в центральный накопитель 48 и архивируют там.
Центральный накопитель 48 включает в себя устройство памяти 51 и четвертый элемент приема и передачи 52. С первого элемента приема и передачи 38 контрольного устройства 13 устанавливается третье коммуникационное соединение 47 с четвертым элементом приема и передачи 52 центрального накопителя 48. Данные в виде инженерно-технической документации, фотографий и видеозаписей и т.д. передают по третьему коммуникационному соединению 47 с контрольного устройства 13 в устройство памяти 51.
ФИГ. 4 демонстрирует первый вариант исполнения способа проверки свойств первого объекта в основе согласно изобретению с опорой на диаграмму процесса (блок-схему). Первый вариант исполнения излагается применительно к проходящему вертикально электропроводу 23, который образует подлежащий проверке первый объект и который расположен в задней стенке 18 внутреннего пространства 14.
На этапе S01 пользователь с помощью пульта управления 34 выбирает подходящую инженерно-техническую документацию (план сооружения) внутреннего пространства 14, которая загружена в контрольное устройство 13. В элементе памяти 37 контрольного устройства 13 могут быть сохранены различные данные инженерно-технической документации внутреннего пространства 14, и пользователь выбирает подходящий план сооружения. В качестве альтернативы пользователь может с помощью пульта управления 34 установить третье коммуникационное соединение 47 с центральным накопителем 48 и перенести инженерно-техническую документацию из устройства памяти 51 центрального накопителя 48 на контрольное устройство 13. На этапе S02 пользователь выбирает электропровод 23 с его заданными координатами (Eo1, Eu1) в качестве подлежащего проверке объекта из инженерно-технической документации и задает подлежащие проверке свойства объекта электропровода 23. В примере исполнения в качестве подлежащего проверке свойства объекта задано положение электропровода 23.
В случае сканирующих детекторов и в случае объектов, размеры которых больше, чем размеры поля детектирования 27, чтобы полностью охватить объект, необходимо выполнить детекторным устройством 11 несколько измерений и поставить их в соответствие с ближайшими по времени данными положения локационного устройства 12; в этом случае целесообразно начинать измерения на конечной точке объекта. В качестве стартовой точки измерений можно заранее задать одну из конечных точек Eo1, Eu1 электропровода 23, либо же контрольное устройство 13 во время реализации способа решает, какая из конечных точек Eo1, Eu1 электропровода 23 расположена ближе, и выдает соответствующее указание по перемещению для детекторного устройства 11. В примере исполнения ФИГ. 4 в качестве стартовой точки для измерений задана верхняя конечная точка E0i электропровода 23.
На этапе S03 пользователь через пульт управления 34 начинает проверку свойств объекта электропровода 23. На этапе S04 локационное устройство 12 определяет текущее положение Pakt и текущую ориентацию Oakt детекторного устройства 11 на задней стенке 18. Текущее положение и ориентацию Pakt, Oakt детекторного устройства 11 на этапе S05 передают с локационного устройства 12 на контрольное устройство 13. На этапе S06 контрольное устройство 13, исходя из текущего положения и ориентации Pakt, Oakt детекторного устройства 11 определяет текущее поле детектирования 27 детекторного устройства 11. Затем контрольное устройство 13 сравнивает на этапе S07 заданные координаты верхней конечной точки Eo1 электропровода 23 с текущим полем детектирования 27 детекторного устройства 11. При этом контрольное устройство 13 на этапе S07 проверяет, расположена ли верхняя конечная точка Eo1 электропровода 23 в пределах текущего поля детектирования 27.
Если верхняя конечная точка Eo1 электропровода 23 расположена не в пределах текущего поля детектирования 27 детекторного устройства 11 (N (нет) на S07), то контрольное устройство 13 на этапе S08, исходя из текущего положения Pakt детекторного устройства 11, а также заданных координат верхней конечной точки Eo1 электропровода 23, рассчитывает инструкцию по перемещению детекторного устройства 11, которая отображается на устройстве отображения 35. Реализацию способа согласно изобретению продолжают этапом S05. Текущее положение и ориентацию Pakt, Oakt детекторного устройства 11 локационное устройство 12 определяет с частотой измерения f; частота измерений f составляет, например, 1 Гц.
Если верхняя конечная точка Eo1 электропровода 23 расположена в пределах текущего поля детектирования 27 (J (да) на S07), то контрольное устройство 13 на этапе S09 сравнивает текущую ориентацию Oakt детекторного устройства 11 с ориентацией объекта 23. Поскольку электропровод 23 проходит параллельно направлению Y, детекторное устройство 11 должно быть направлено соответствующим образом, а затем перемещаться в направлении Y над электропроводом 23. Для точного обнаружения положения электропровода 23 и в частности при использовании сканирующего детектора требуется, как правило, волнообразное (по извилистой линии) движение над электропроводом 23, которое демонстрируется на устройстве отображения 35 в порядке инструкции по перемещению, выданной контрольным устройством 13.
Если детекторное устройство 11 не направлено параллельно направлению Y (N (нет) на S09), это контрольное устройство 13 на этапе S10 вырабатывает для пользователя инструкцию по перемещению, которая отображается на устройстве отображения 35. Во время вращательного движения детекторного устройства 11, выполняемого пользователем, с помощью локационного устройства 12 на этапе S11 определяют текущую ориентацию Oakt детекторного устройства 11, а затем продолжают реализацию способа с этапа S09. Если детекторное устройство 11 направлено параллельно направлению Y (J (да) на S09), то детекторное устройство 11 на этапе S12 начинает исполнение серии измерений с параметрами детектирования, которые согласованы со свойствами объекта электропровода 23. В качестве измеряемых показателей для электропровода 23 можно использовать, например, напряженность магнитного и/или электрического поля. Путем установления соответствия результатов измерения, полученных с детекторного устройства 11, ближайшим по времени данным положения с локационного устройства 12 контрольное устройство 13 может определить реальное положение и ориентацию электропровода 23 и сравнить с данными конкретными заданными координатами электропровода 13. На этапе S13 на устройстве отображения 35 отображается окончание измерений.
В первом варианте исполнения способа согласно изобретению текущее положение Pakt детекторного устройства 11 и текущую ориентацию Oakt детекторного устройства сравнивают с заданными координатами электропровода 23 на этапах S07 и S09 одну за другой. В качестве альтернативы можно сравнивать текущее положение Pakt и текущую ориентацию Oakt детекторного устройства 11 с заданными координатами электропровода 23 на одном общем этапе способа, а затем на устройстве отображения 35 может отображаться инструкция о перемещении для положения и ориентации детекторного устройства 11.
ФИГ. 5 демонстрирует второй вариант исполнения способа проверки свойств первого объекта и второго объекта согласно изобретению со ссылкой на диаграмму процесса (блок-схему). Описание второго варианта исполнения приводится на примере электропровода 23 представляющего собой первый подлежащий проверке объект, и водопроводной трубы 25, представляющего собой подлежащий проверке второй объект. При этом электропровод 23 и водопроводная труба 25 расположены в задней стенке 18 внутреннего пространства 14.
В качестве стартовой точки измерений может быть заранее задан один из подлежащих проверке объектов 23, 25, либо же контрольное устройство 13 во время реализации способа решает, какой из объектов 23, 25 расположен ближе, и выдает соответствующее указание по перемещению для детекторного устройства 11. В примере исполнения с ФИГ. 5 измеряют расстояния и сравнивают их друг с другом. Поскольку заданные координаты объектов 23, 25 и таким образом и размеры объектов 23, 25 известны до реализации способа, заранее известно, можно ли охватить объект одним измерением или же необходимо перемещать детекторное устройство 11 над объектом и одновременно проводить серию измерений. В данном примере исполнения длина l1 электропровода 23 и длина l2 водопроводной трубы 25 больше, чем размеры поля детектирования 27 детекторного устройства 11, так что с помощью устройства детектирования 11 и локационного устройства 12 необходимо провести несколько измерений, чтобы полностью охватить объекты 23, 25. При использовании сканирующих детекторов несколько измерений требуются в любом случае.
На этапе S101 пользователь выбирает подходящую инженерно-техническую документацию (план сооружения) внутреннего пространства 14, которая загружена в контрольное устройство 13. На этапе S102 пользователь выбирает электропровод 23 в качестве подлежащего проверке первого объекта, а водопроводную трубу 25 в качестве подлежащего проверке второго объекта из инженерно-технической документации и задает подлежащие проверке свойства объектов электропровода 23 и водопроводной трубы 25. После того как на этапе S102 были заданы объекты 23, 25 и подлежащие проверке свойства объектов, пользователь на этапе S103 с пульта управления 34 начинает проверку свойств объекта.
На этапе S104 локационное устройство 12 определяет текущее положение Pakt и текущую ориентацию Oakt детекторного устройства 11 на задней стенке 18. Текущее положение и ориентацию Pakt, Oakt детекторного устройства 11 на этапе S105 передают с локационного устройства 12 на контрольное устройство 13, которое на этапе S106 на основании текущего положения и ориентации детекторного устройства 11 определяет текущее поле детектирования 27. Затем контрольное устройство 13 сравнивает на этапе S107 текущее поле детектирования с заданными координатами электропровода 23 и заданными координатами водопроводной трубы 25.
Если ни конечные точки Eo1, Eu1 электропровода 23, ни конечные точки Еo2, Еu2 водопроводной трубы 25 не располагается в пределах текущего поля детектирования 27 детекторного устройства 11 (N (нет) на S107), то контрольное устройство 13 на этапе S108 рассчитывает первое расстояние d1 между электропроводом 23 и текущим положением Pakt детекторного устройства 11, а также второе расстояние d2 между водопроводной трубой 25 и текущим положением Pakt детекторного устройства 11.
Для объекта, находящегося на меньшем расстоянии до текущего положения Pakt детекторного устройства 11 контрольное устройство 13 на этапе S109 вырабатывает инструкцию по перемещению для детекторного устройства 11, которая отображается на устройстве отображения 35. Во время передвижения детекторного устройства 11, выполняемого пользователем, с помощью локационного устройства 12 на этапе S110 определяют текущее положение Pakt и текущую ориентацию Oakt детекторного устройства 11 и продолжают реализацию способа с этапа S105. Если конечная точка Eo1, Eu1 электропровода 23 или конечная точка Еo2, Еu2 водопроводной трубы 25 расположена в пределах текущего поля детектирования 27 (J (да) на S107), то контрольное устройство 13 на этапе S111 сравнивает текущую ориентацию Oakt детекторного устройства 11 с ориентацией объекта, расположенного в пределах поля детектирования 27.
Если текущая ориентация Oakt детекторного устройства 11 отличается от ориентации подлежащего проверке объекта (N (нет) на S111), то контрольное устройство 13 на этапе S112 вырабатывает инструкцию по перемещению детекторного устройства 11, которая отображается на устройстве отображения 35. Во время вращательного движения детекторного устройства 11, выполняемого пользователем, с помощью локационного устройства 12 на этапе S113 определяют текущую ориентацию Oakt детекторного устройства 11 и продолжают реализацию способа с этапа S111.
Если текущая ориентация Oakt детекторного устройства соответствует ориентации объекта (J (да) на S111), то контрольное устройство 13 на этапе S114 вырабатывает инструкцию по перемещению детекторного устройства 11 и начинает серию измерений с помощью детекторного устройства 11; при этом параметры детектирования согласованы с подлежащими проверке свойствами объекта. На этапе S115 окончание измерений для подлежащего проверке объекта отображается на устройстве отображения 35, а реализацию способа продолжают применительно к следующему объекту, подлежащему проверке.
Текущее положение Pakt и текущую ориентацию Oakt детекторного устройства 11 на этапе S116 определяют с помощью локационного устройства 12 и передают на контрольное устройство 13. Контрольное устройство 13 на этапе S117 определяет, исходя из текущего положения и ориентации Pakt, Oakt детекторного устройства 11 текущее поле детектирования 27 и на этапе S118 сравнивает текущее поле детектирования 27 с заданными координатами (конечные точки, ориентация) подлежащего проверке объекта.
Если ни одна из конечных точек объекта не располагается в пределах текущего поля детектирования детекторного устройства 11 и/или ориентация объекта отличается от текущей ориентации Oakt детекторного устройства 11 (N (нет) на S118), то контрольное устройство 13 на этапе S119 на основании текущего положения и ориентации Pakt, Oakt детекторного устройства 11, а также заданных координат объекта (конечные точки и ориентация) вырабатывает инструкцию по перемещению для детекторного устройства 11, которая отображается на устройстве отображения 35. Во время передвижения детекторного устройства 11, выполняемого пользователем, с помощью локационного устройства 12 на этапе S120 определяют текущее положение Pakt и текущую ориентацию Oakt детекторного устройства 11 и продолжают реализацию способа с этапа S117.
Если одна конечная точка объекта расположена в пределах текущего поля детектирования 27 детекторного устройства 11, а ориентация объекта соответствует текущей ориентации Oakt детекторного устройства (J (да) на S118), то контрольное устройство 13 на этапе S121 вырабатывает инструкцию по перемещению детекторного устройства 11 и начинает серию измерений с помощью детекторного устройства 11; при этом параметры детектирования согласованы с подлежащими проверке свойствами объекта. На этапе S122 на устройстве отображения 35 отображается окончание измерений для подлежащего проверке объекта. После этапа 122 реализация способа согласно изобретению завершена.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЕТЕКТИРОВАНИЯ ОБЛАСТИ ИЗМЕРЕНИЯ В ОСНОВЕ | 2015 |
|
RU2682850C2 |
| СПОСОБ ПЕРЕНОСА ОБЪЕКТА НА ГРАНИЧНУЮ ПОВЕРХНОСТЬ | 2015 |
|
RU2683790C2 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ОСНОВЫ ВДОЛЬ РАЗДЕЛИТЕЛЬНОЙ ЛИНИИ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2012 |
|
RU2629505C2 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТЕСТИРОВАНИЯ С ИСПОЛЬЗОВАНИЕМ ПОТОКОВ РАССЕЯНИЯ | 2015 |
|
RU2644026C1 |
| СИСТЕМА, УСТРОЙСТВО И СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА, ПОГРУЗОЧНОГО УСТРОЙСТВА И ГРУЗА ПРИ РАБОТЕ ПОГРУЗОЧНОГО УСТРОЙСТВА | 2012 |
|
RU2623295C2 |
| СИСТЕМА ДЕТЕКТИРОВАНИЯ ДЛЯ РЕГИСТРАЦИИ МАГНИТНЫХ ОБЪЕКТОВ В ЧЕЛОВЕЧЕСКОМ ОРГАНИЗМЕ | 2012 |
|
RU2598341C2 |
| УСТРОЙСТВО ОБРАБОТКИ ДОКУМЕНТОВ | 2007 |
|
RU2447007C2 |
| АППАРАТ ДЛЯ ИНСЕКТИЦИДНОГО ОПРЫСКИВАНИЯ | 2019 |
|
RU2795590C2 |
| ЛАЗЕРНО-РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2004 |
|
RU2263930C1 |
Изобретение относится к области проверки свойств объекта. Способ проверки свойств объекта, выполненного в виде провода, трубы или арматурного стержня, в основе, выполненной в виде потолка, стены или пола, с помощью оборудования содержит детекторное устройство, локационное устройство и контрольное устройство, причем: на первом этапе выбирают первый объект по меньшей мере с одним подлежащим проверке свойством объекта (A1) и первыми заданными координатами (Eo1, Eu1); на втором этапе с помощью локационного устройства определяют текущее положение (Pakt) детекторного устройства в пространстве; на третьем этапе контрольным устройством, исходя из текущего положения (Pakt) детекторного устройства, определяется текущее поле детектирования; на четвертом этапе контрольным устройством сравниваются первые заданные координаты (Ео1, Eu1) с текущим полем детектирования детекторного устройства. Технический результат заключается в разработке способа проверки свойств объекта в основе. 14 з.п. ф-лы, 5 ил.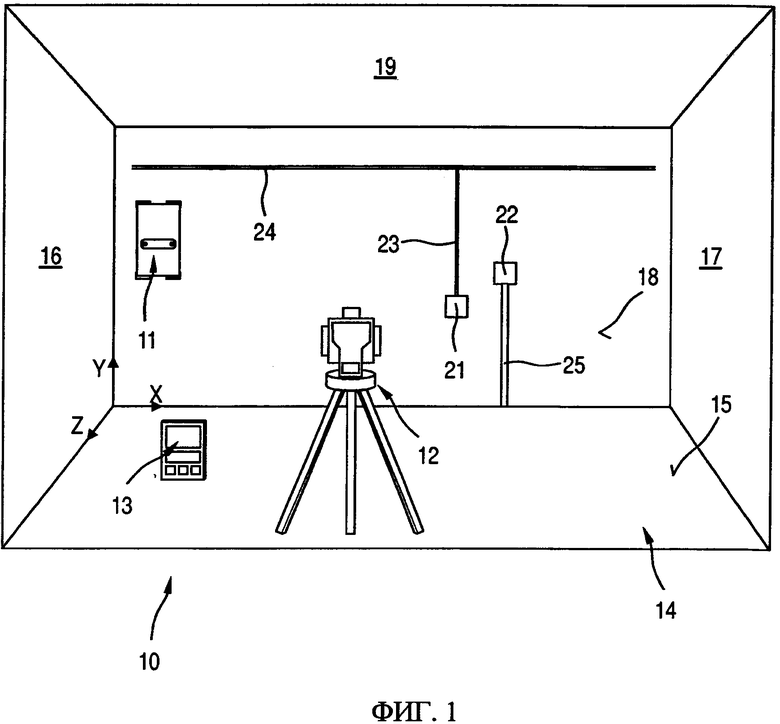
1. Способ проверки свойств объекта (23, 25), выполненного в виде провода, трубы или арматурного стержня, в основе (18), выполненной в виде потолка, стены или пола, с помощью оборудования (10), содержащего детекторное устройство (11), локационное устройство (12) и контрольное устройство (13), причем:
- на первом этапе выбирают первый объект (23) по меньшей мере с одним подлежащим проверке свойством объекта (A1) и первыми заданными координатами (Eo1, Eu1),
- на втором этапе с помощью локационного устройства (12) определяют текущее положение (Pakt) детекторного устройства (11) в пространстве (14),
- на третьем этапе контрольным устройством (13), исходя из текущего положения (Pakt) детекторного устройства (11), определяется текущее поле детектирования (27), и
- на четвертом этапе контрольным устройством (13) сравниваются первые заданные координаты (Ео1, Eu1) с текущим полем детектирования (27) детекторного устройства (11).
2. Способ по п. 1, отличающийся тем, что посредством детекторного устройства (11) выполняют по меньшей мере одно измерение в основе (18), если первые заданные координаты (Eo1, Eu1) первого объекта (23) расположены в пределах текущего поля детектирования (27).
3. Способ по п. 2, отличающийся тем, что измерение проводится детекторным устройством (11) с параметрами детектирования, которые согласованы с первыми свойствами (А1) первого объекта (23).
4. Способ по п. 1, отличающийся тем, что если заданные координаты первого объекта (23) по меньшей мере частично расположены за пределами текущего поля детектирования (27), то контрольным устройством (13) на основании текущего положения (Pakt) детекторного устройства (11) и первых заданных координат первого объекта (23) рассчитывается инструкция по перемещению для детекторного устройства (11) и отображается на устройстве отображения (35).
5. Способ по п. 1, отличающийся тем, что если первые заданные координаты первого объекта (23) частично расположены в пределах текущего поля детектирования (27) и размеры (I1) первого объекта (23) больше, чем текущее поле детектирования (27), то контрольным устройством (13) рассчитывается инструкция по перемещению для детекторного устройства (11) и отображается на устройстве отображения (35), а во время движения выполняется посредством детекторного устройства (11) ряд измерений в основе (18).
6. Способ по п. 1, причем
- на первом этапе дополнительно кроме первого объекта (23) выбирают второй объект (25) с подлежащими проверке вторыми свойствами объекта и вторыми заданными координатами (Eo2, Eu2), и
- на четвертом этапе контрольным устройством (13) помимо первых заданных координат (Eo1, Eu1) первого объекта (23) дополнительно сравниваются вторые заданные координаты (Eo2, Eu2) второго объекта (25) с текущим полем детектирования (27) детекторного устройства (11).
7. Способ по п. 6, отличающийся тем, что посредством детекторного устройства (11) выполняют по меньшей мере одно измерение в основе (18), если первые заданные координаты (Ео1, Eu1) первого объекта (23) или вторые заданные координаты (Eo2, Eu2) второго объекта (25) расположены в пределах текущего поля детектирования (27) детекторного устройства (11).
8. Способ по п. 7, отличающийся тем, что указанное по меньшей мере одно измерение проводится детекторным устройством (11) с параметрами детектирования, которые согласованы со свойствами объекта, расположенного в пределах текущего поля детектирования (27).
9. Способ по одному из пп. от 7 до 8, отличающийся тем, что после измерения с помощью детекторного устройства (11) контрольным устройством (13) на основании текущего положения (Pakt) детекторного устройства (11) и заданных координат расположенного за пределами текущего поля детектирования (27) объекта рассчитывается инструкция по перемещению для детекторного устройства (11) и отображается на устройстве отображения (35).
10. Способ по п. 6, отличающийся тем, что посредством детекторного устройства (11) выполняют по меньшей мере одно измерение в основе, если первые заданные координаты (Eo1, Eu1) первого объекта (23) и вторые заданные координаты (Eo2, Eu2) второго объекта (25) расположены в пределах текущего поля детектирования (27) детекторного устройства (11).
11. Способ по п. 10, отличающийся тем, что посредством детекторного устройства (11) проводят первое измерение с первыми параметрами детектирования, которые согласованы с первыми свойствами первого объекта (23), и второе измерение со вторыми параметрами детектирования, которые согласованы с вторыми свойствами второго объекта (25).
12. Способ по п. 6, отличающийся тем, что если заданные координаты первого и второго объектов (23, 25) находятся за пределами текущего поля детектирования (27) детекторного устройства (11), то контрольным устройством (13) на основании текущего положения (Pakt) детекторного устройства (11), а также первых и вторых заданных координат первого и второго объектов (23, 25) рассчитываются первое и второе расстояния (d1, d2).
13. Способ по п. 12, отличающийся тем, что контрольным устройством (13) сравниваются друг с другом первое и второе расстояния (d1, d2) и для объекта с меньшим расстоянием до текущего положения детекторного устройства (11) контрольным устройством (13) рассчитывается инструкция по перемещению для детекторного устройства (11) и отображается на устройстве отображения (35).
14. Способ по п. 1, отличающийся тем, что на втором этапе посредством локационного устройства (12) дополнительно определяют текущую ориентацию (Oakt) детекторного устройства (11).
15. Способ по п. 14, отличающийся тем, что на третьем этапе, исходя из текущего положения (Pakt) и текущей ориентации (Oakt) детекторного устройства (11) определяют текущее поле детектирования (27) детекторного устройства (11).
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| СПОСОБ БЕСКОНТАКТНЫХ ИЗМЕРЕНИЙ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2551396C1 |
| WO 2009009180 A2, 15.01.2009. | |||

