Область техники
Настоящее изобретение относится к разделительным устройствам, в частности устройству для разделения основы вдоль разделительной линии согласно ограничительной части пункта 1 формулы изобретения, а также к способу управления им согласно ограничительной части пункта 10 формулы изобретения.
Уровень техники
Устройство для разделения основы вдоль разделительной линии служит, например, для разделения армированных или неармированных стен, перекрытий и полов из бетона или подобной основы вращающимися пильными полотнами. Например, это может быть востребовано при работах по сносу зданий, санировании и работах по реконструкции, при разделении уже существующих бетонных стен, сносе или вырезании областей из бетонных стен.
Европейская заявка на патент №1693173 раскрывает известное устройство для разделения основы вдоль линии разделения и известный способ управления разделительным устройством для частично автоматизированного процесса обработки. Разделительное устройство включает пильный блок с пильным полотном, которое может вращаться вокруг оси вращения, направляющие каретки, для движения пильного блока вдоль направляющего рельса и устройство управления пильным блоком и направляющими салазками. Пильный блок включает пильную головку дисковой пилы и консоль пилы, на которой смонтировано пильное полотно и которая может поворачиваться вокруг поворотной оси параллельно оси вращения пильного полотна. Устройство управления соединено с датчиком перемещения, который определяет положение пильного блока вдоль направляющего рельса, и с датчиком угла поворота, который определяет угол поворота консоли пилы. В способе управления разделительным устройством, с помощью средства ввода устройства управления осуществляется ввод первой и второй конечной точки разделительной линии, которые представляют собой обе точки поворота для движения подачи направляющих кареток.
Известное устройство для разделения основы вдоль разделительной линии имеет недостатком то, что пользователь должен пересчитывать конечные точки разделительной линии в координатах, прежде чем он сможет их ввести в устройство управления. Этот пересчет чреват ошибками.
Представление изобретения
Было бы желательным улучшение устройства для разделения основы вдоль разделительной линии и способа управления подобного разделительного устройства в части описанных выше недостатков.
Задача настоящего изобретения заключается в дальнейшем усовершенствовании устройства для разделения основы вдоль разделительной линии в том отношении, что оператор маркирует первую точку разделительной линии, и пересчет длин осуществляется устройством управления. Задачей изобретения является также предложение соответствующего способа управления разделительным устройством.
Эта задача в ранее названном устройстве для разделения основы вдоль разделительной линии согласно изобретению решается с помощью признаков независимого пункта 1 формулы изобретения и в части ранее названного способа управления таким разделительным устройством с помощью признаков пункта 10 формулы изобретения.
Согласно изобретению предусмотрено первое индикаторное устройство, которое маркирует первую конечную точку разделительной линии. Предпочтительно предусмотрено второе индикаторное устройство, которое маркирует вторую конечную точку разделительной линии. Оператор с помощью индикаторных устройств может маркировать конечную точку или конечные точки разделительной линии и не должен производить никакого пересчета длин и координат. Оператор может без сложностей наносить конечные точки, которые указываются лазерным прибором, на подлежащую обработке поверхность.
В предпочтительном варианте осуществления первое и/или второе индикаторные устройства имеют оптический индикаторный элемент, который оптически маркирует конечную точку, генератор сигнала и детекторное устройство, причем генератор сигнала посылает позиционный сигнал, соответствующий положению конечной точки или соответствующий положению точки начала отсчета, которая расположена на определенном расстоянии от конечной точки, и детекторное устройство принимает позиционный сигнал генератора сигнала. При этом детекторное устройство особенно предпочтительно имеет возможность соединения с устройством управления и передает информацию, соответствующую позиционному сигналу генератора сигнала, устройству управления. Конструкция индикаторных устройств, состоящая из оптического индикаторного элемента, генератора сигнала и детекторного устройства предоставляет возможность автоматического способа управления.
В предпочтительном варианте осуществлении детекторное устройство первого индикаторного устройства и детекторное устройство второго индикаторного устройства выполнены в виде общего детекторного устройства. Общее детекторное устройство для обоих индикаторных устройств уменьшает относящиеся к оборудованию затраты.
Предпочтительно первое индикаторное устройство и/или второе индикаторное устройство с помощью устройства для перемещения можно перемещать по направляющему рельсу. Перемещаемое индикаторное устройство имеет преимущество в том, что оператор не должен снимать индикаторное устройство с направляющего рельса, а может перемещать вдоль направляющего рельса. Предпочтительно механический концевой упор соединен с оптическим индикаторным элементом первого и/или второго индикаторного устройства.
В качестве генератора сигнала и детекторного устройства пригодны все распространенные сенсорные системы для обнаружения объекта. Детекторное устройство выполнено, например, в виде индуктивного выключателя, срабатывающего при приближении предмета, который обнаруживает проводящий электрический ток объект. В качестве альтернативы детекторное устройство может быть выполнено в виде датчика Холла или кулачкового выключателя.
В предпочтительной форме осуществления генератор сигнала имеет передающий блок, который посылает измерительный пучок, и детекторное устройство имеет приемный блок и устройство для обработки. Особенно предпочтительно передающий блок, приемный блок и устройство для обработки образуют систему для измерения расстояния с помощью лазера или систему для измерения расстояния с помощью ультразвука. С помощью систем измерения расстояния лазером и ультразвуком расстояния могут измеряться очень точно.
Далее изобретение относится к способу управления разделительным устройством, которое разделяет основу вдоль разделительной линии до первой конечной точки, при котором позиционный сигнал, который соответствует положению первой конечной точки, создается генератором сигнала и принимается детекторным устройством, информация, соответствующая позиционному сигналу, передается устройству управления, и приводное устройство соответственно управляется устройством управления.
Примеры осуществления
Примеры осуществления изобретения далее описываются с помощью чертежа. Он не обязательно должен отражать примеры осуществления в масштабе, скорее чертеж, служащий для пояснения, выполнен в схематическом виде и/или слегка искаженной форме. В отношении дополнений, в части технических решений, видимых непосредственно из чертежа, делается ссылка на соответствующий уровень техники. При этом следует учитывать, что могут осуществляться разнообразные модификации и изменения вариантов осуществления, касающиеся формы и деталей, не отклоняясь от общей идеи изобретения. Признаки, раскрытые в описании, чертеже, а также в формуле изобретения в плане усовершенствования изобретения могут быть существенными как по отдельности, так и в любой возможной комбинации. К тому же в рамки изобретения попадают все комбинации по меньшей мере из двух признаков, раскрытых в описании, чертеже и/или пунктах формулы изобретения. Общая идея изобретения не ограничена точной формой или деталями показанного ниже и описанного предпочтительного варианта осуществления или объектом, которой был бы ограничен в сравнении с объектом, заявленным в формуле изобретения. Значения в приведенных областях измерения, лежащие также внутри названных границ, должны быть раскрыты в виде граничных значений и могут устанавливаться и использоваться произвольно. Для простоты, ниже для идентичных или подобных частей или частей с идентичной или подобной функцией используются одинаковые позиции обозначения.
Показано:
Фиг.1: предложенное в соответствии с изобретением устройство для разделения основы вдоль разделительной линии между первой и второй конечными точками, которые маркированы индикаторным устройством, в схематическом изображении;
Фиг.2A, B: первая форма осуществления индикаторного устройства с оптическим индикаторным элементом и выполненным в виде измерительной системы расстояния с помощью лазера сенсорного устройства (фиг.2A) и взаимодействие системы измерения расстояния с помощью лазера с измеряемым объектом в виде блок-схемы (фиг.2B);
Фиг.3A, B: предложенный в соответствии с изобретением способ управления разделительным устройством с помощью индикаторного устройства на фиг.2A (фиг.3A) и контрольный цикл программы, с помощью которой проверяется точность движения подачи при способе управления по фиг.3A (фиг.3B); и
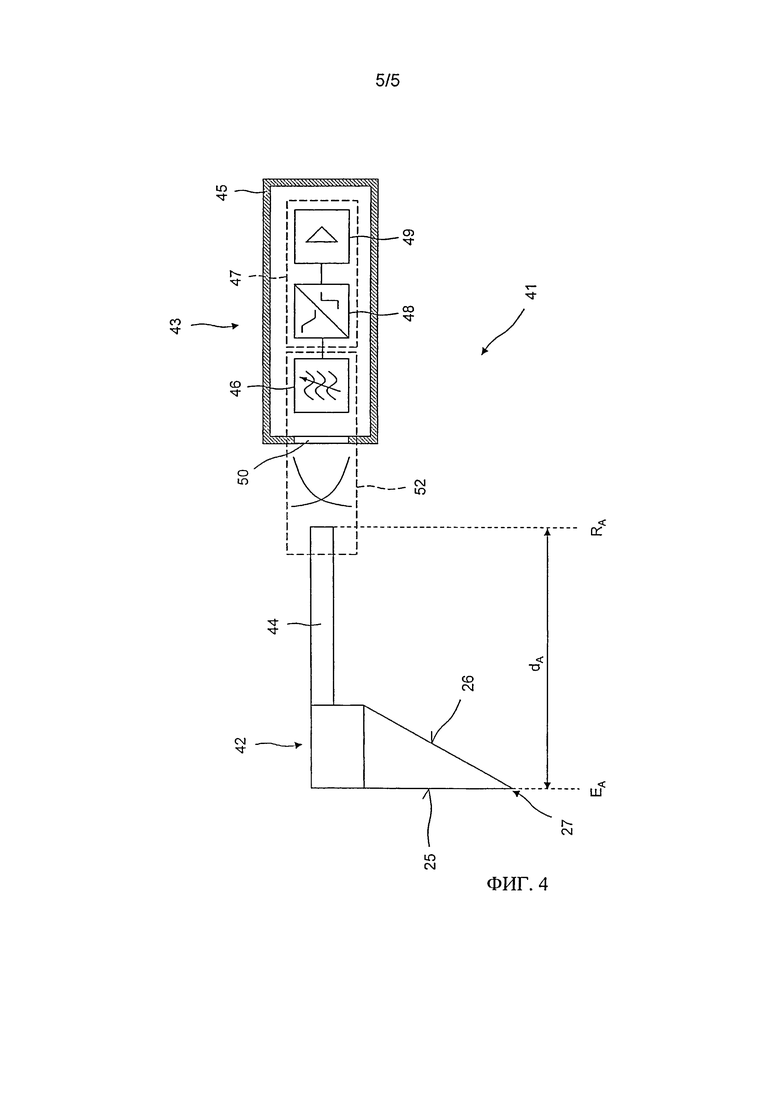
Фиг.4: вторая форма осуществления индикаторного устройства с оптическим индикаторным элементом и сенсорным устройством, выполненным в виде индуктивного выключателя, срабатывающего при приближении предмета.
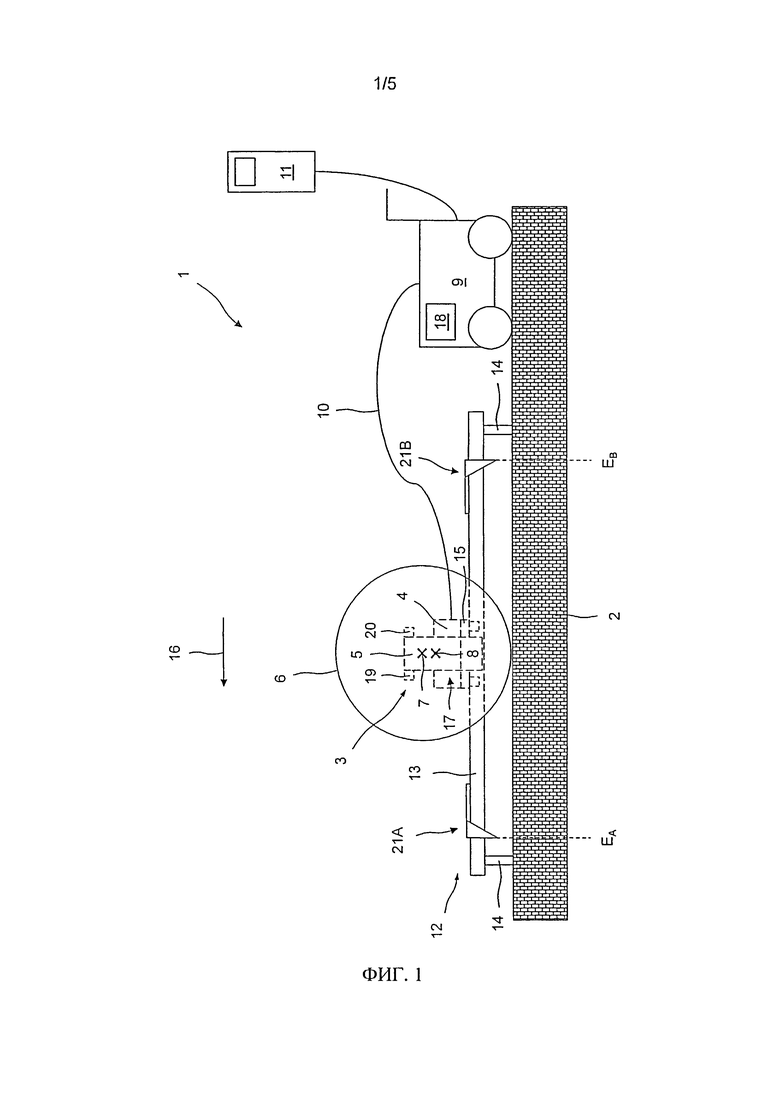
Фиг.1 показывает предложенное в соответствии с изобретением устройство 1 для разделения основы 2 вдоль разделительной линии, которая ограничена первой конечной точкой EA и второй конечной точкой EB в схематичном изображении.
Разделительное устройство 1 выполнено в виде отрезного станка и включает пильный блок 3 с пильной головкой 4 дисковой пилы и консолью 5 пилы, на которой расположено пильное полотно 6. Для защиты пользователя пильное полотно 6 окружено защитным устройством пильного полотна (не показано), которое с помощью держателя защитного устройства полотна расположено на консоли 5 пилы. Пильное полотно приводится во вращение вокруг оси 7 вращения расположенным в пильной головке 4 пилы приводным устройством. Консоль 5 пилы выполнена с возможностью поворота вокруг оси 8 вращения. Угол поворота консоли 5 пилы определяет наряду с диаметром пильного полотна 6 как глубоко пильное полотно 6 погружается в подлежащую обработке основу. В качестве альтернативы консоль 5 пилы выполнена с возможностью перемещения с помощью линейного привода или другого приводного устройства.
Обеспечение электрической или гидравлической энергией пильного блока 3 осуществляется посредством устройства 9 обеспечения, в котором размещены все блоки обеспечения. Устройство 9 обеспечения через магистраль 10 обеспечения, которая включает все коммуникационные магистрали, электропровода и другие магистрали обеспечения, соединено с пильным блоком 3. Обслуживание отрезного станка 1 осуществляется посредством обслуживающее устройство 11, которое в представленном на фиг.1 варианте осуществления соединено с устройством 9 обеспечения.
Собранные в устройстве 9 обеспечения блоки для обеспечения в качестве альтернативы могут быть интегрированы полностью или частично в пильный блок 3. При полной интеграции блоков обеспечения в пильный блок 3 обслуживающее устройство 11 непосредственно соединено с пильным блоком 3; при частичной интеграции блоков обеспечения в пильный блок 3 устройство 11 управления может соединяться с устройством 9 обеспечения и/или пильным блоком 3.
Разделительное устройство 1 дальше включает крепежное приспособление 12, состоящее из направляющего рельса 13 и основания 14 рельса, а также направляющего устройства, выполненного в виде направляющих кареток 15. Направляющий рельс 13 с помощью основания 14 рельса крепится к подлежащей обработке основе 2. Пильный блок 3 с помощью направляющей каретки 15 расположен на направляющем рельсе 13 с возможностью продольного перемещения в направлении 16 подачи, а также в направлении противоположном направлению 16 подачи.
Пильный блок 3 включает первое приводное устройство для вращения пильного полотна 6 вокруг оси 7 вращения и второе приводное устройство для движения направляющей каретки 15 вдоль направляющего рельса 13. Первое и второе приводные устройства в исполнении на фиг.1 выполнены в виде общего приводного устройства 17; в качестве альтернативы они могут быть выполнены в виде отдельных приводных устройств в пильном блоке 3. Управление приводным устройством 17 осуществляется при помощи устройства 18 управления, которое интегрировано в устройство 9 обеспечения. В качестве альтернативы устройство 18 управления может быть размещено в пильном блоке 3 или обслуживающем устройстве 11, или устройство управления может быть разделено на отдельные устройства управления, которые размещены в различных элементах отрезного станка 1.
Устройство 18 управления пильным блоком 3 соединено с устройством 19 для измерения расстояния для получения данных о пройденном пути и устройством 20 для измерения угла для получения данных об угле поворота консоли 5 пилы. Устройство 19 для измерения расстояния и устройство 20 для измерения угла в варианте осуществления на фиг.1 установлены на пильном блоке 3.
Разделительная линия ограничена первой конечной точкой EA и второй конечной точкой EB. Оператор маркирует первую конечную точку EA с помощью первого индикаторного устройства 21A и вторую конечную точку EB с помощью второго индикаторного устройства 21B. Второе индикаторное устройство 21B имеет конструкцию, аналогичную первому индикаторному устройству 21A, однако, в зеркальном изображении расположено на направляющем рельсе 13. Конструкция первого и второго индикаторного устройства 21A, 21B поясняется на примере первого индикаторного устройства 21A и аналогично действительна для второго индикаторного устройства 21B.
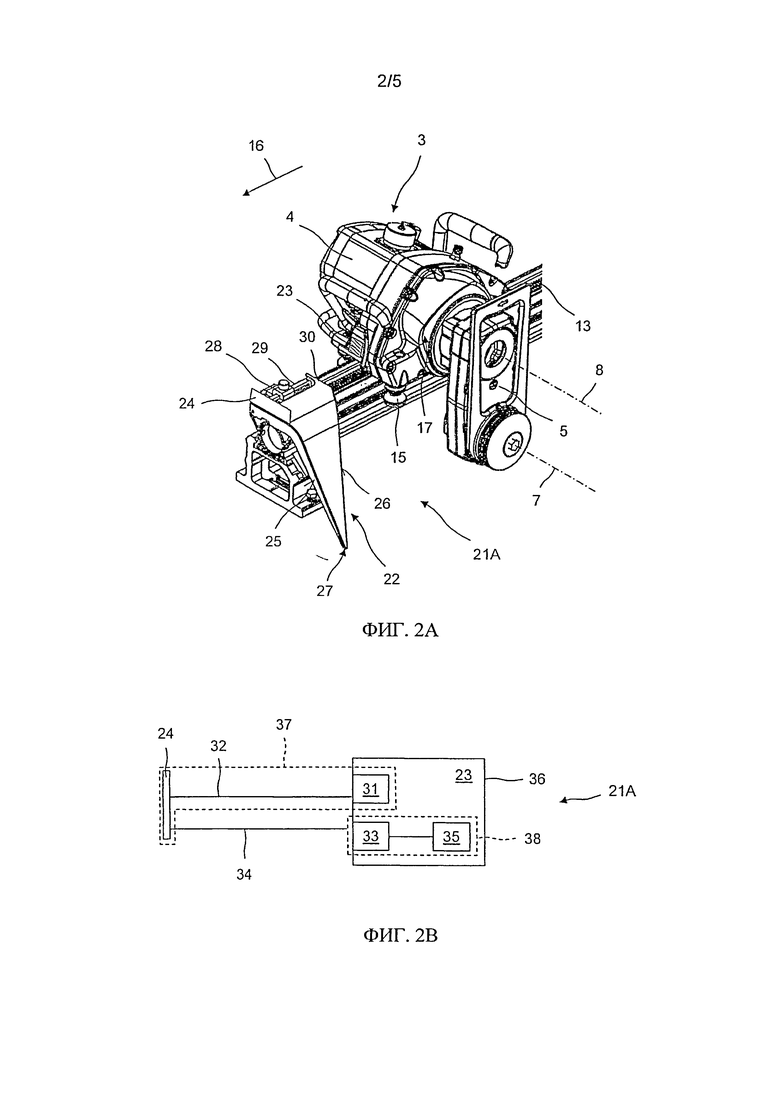
Фиг.2A показывает первую форму осуществления индикаторного устройства 21A, состоящего из оптического индикаторного элемента 22, сенсорного устройства 23 и измеряемого объекта 24. Сенсорное устройство 23 выполнено в виде системы измерения расстояния с помощью лазера, которая закреплена на пильной головке 4 пильного блока 3. Измеряемый объект 24 выполнен в виде поверхности отражения и/или рассеяния и расположен на позиции конечной точки EA.
Оптический индикаторный элемент 22 выполнен в виде листовой детали с задней кромкой 25 и передней кромкой 26, которые образуют острие стрелы 27. При этом задняя кромка 25 оптического индикаторного элемента 22 маркирует конечную точку EA разделительной линии. Оптический индикаторный элемент 22 с помощью крепежного устройства 28 закреплен на направляющем рельсе 13. При снятом крепежном устройстве 28 индикаторное устройство 21A с помощью устройства 29 перемещения может перемещаться вдоль направляющего рельса 13.
Движение подачи пильного блока 3 вдоль направляющего рельса 13 из соображений безопасности ограничивается механическим концевым упором. Концевой упор препятствует тому, что бы пильный блок 3 двигался за пределы допустимой рабочей области вдоль направляющего рельса 13. Концевой упор 30 интегрирован в оптический индикаторный элемент 22. Когда направляющие каретки при движении подачи упираются в концевой упор 30, блокируется движение подачи направляющих кареток 15. Чтобы концевой упор 30 мог действовать, оптический индикаторный элемент 22 должен быть выполнен механически прочным и надежно закреплен с помощью крепежного устройства 28 на направляющем рельсе 13.
Фиг.2B показывает взаимодействие системы 23 для измерения расстояния с помощью лазера и измеряемого объекта 24 в форме структурной схемы. Система 23 для измерения расстояния с помощью лазера включает передающий блок 31, который направляет лазерный луч 32, принимающий блок 33, который принимает отраженный и/или рассеянный измеряемым объектом 24 лазерный луч 34 и устройство 35 обработки, которое с помощью коммуникационного соединения соединено с принимающим блоком 33. Устройство 35 обработки рассчитывает разность фактического положения пильного блока 3 относительно конечной точки EA разделительной линии, по разности вырабатывает команду управления для управления движением подачи приводного устройства 17 и передает команду управления приводному устройству 17 или же соответствующему устройству 18 управления. Измеряемый объект 24 маркирует конечную точку EA разделительной линии или точку начала отсчета RA, которая расположена на известном расстоянии относительно конечной точки EA.
Система 23 измерения расстояния с помощью лазера интегрирована в корпус 36, установлена на пильной головке 4 и выполнена с возможностью перемещения с помощью направляющих кареток 15 вдоль направляющего рельса 13. В качестве альтернативы система измерения расстояния с помощью лазера может быть интегрирована в пильную головку 4, причем должно быть обеспечено беспрепятственное попадание лазерного луча на измеряемый объект 24. В этом случае устройство 35 обработки может быть интегрировано в устройство управления 18 пильного блока 3 и посредством коммуникационного соединения подключено к принимающему блоку 33.
Сенсорное устройство 23 и измеряемый объект 24 вместе образуют генератор 37 сигнала и детекторное устройство 38. Генератор 37 сигнала включает передающий блок 31 системы 23 измерения расстояния с помощью лазера и измеряемый объект 24, и детекторное устройство 38 включает принимающий блок 33 и устройство 35 обработки системы 23 измерения расстояния с помощью лазера.
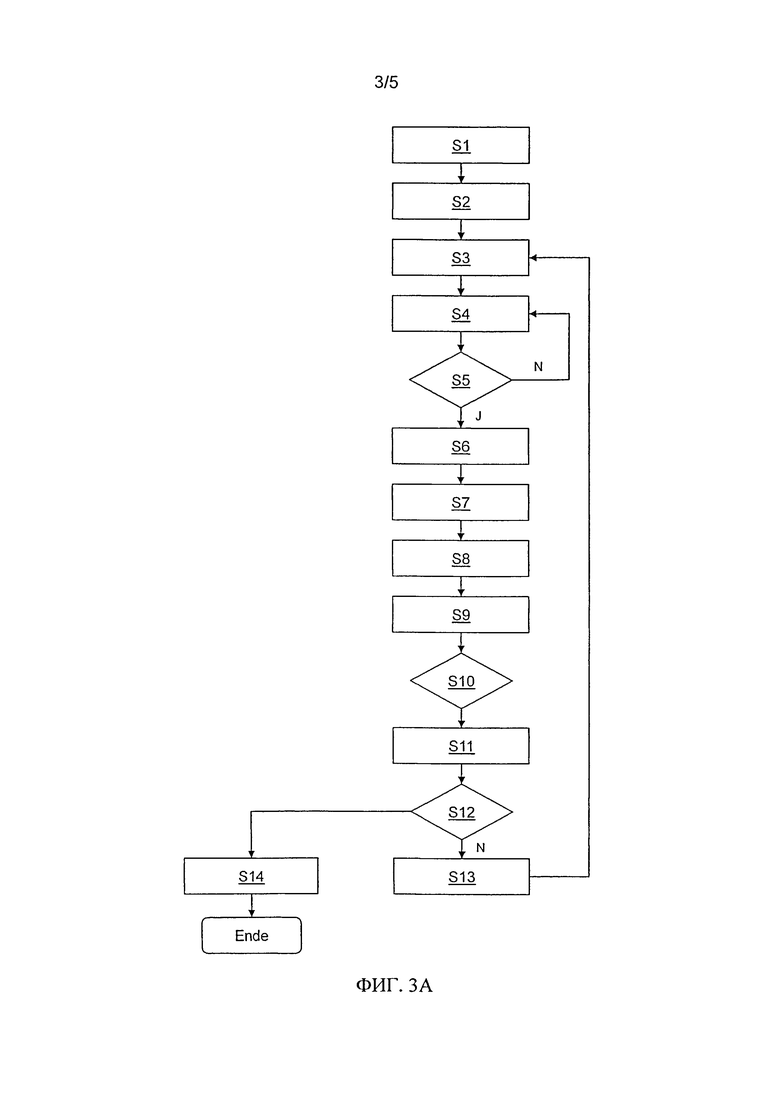
Фиг.3A показывает предложенный в соответствии с изобретением способ управления отрезным станком 1 с помощью индикаторных устройств 21A, 21B. Способ управления является частью способа обработки для разделения основы 2 вдоль разделительной линии между первой конечной точкой EA и второй конечной точкой EB. Способ обработки подразделен на способ подготовки и способ управления.
Способ подготовки включает все подготовительные этапы, которые проводит оператор. Оператор крепит направляющий рельс 13 с помощью основания 14 рельса на подлежащей обработке основе 2 и подвешивает пильный блок в произвольной стартовой позиции на направляющий рельс 13, причем стартовая позиция расположена между первой конечной точкой EA и второй конечной точкой EB разделительной линии. Оператор маркирует первую конечную точку EA с помощью первого индикаторного устройства 21A и маркирует вторую конечную точку EB с помощью второго индикаторного устройства 21B. Первое и второе индикаторные устройства 21A, 21B с помощью крепежного устройства 28 крепятся на направляющем рельсе 13.
Оператор посредством устройства 11 обслуживания вводит различные параметры, как, например, диаметр пильного полотна 6, глубину конечного разреза разделительной линии и максимальную скорость подачи. Параметры передаются устройству 18 управления. Другие параметры, которые требуются для автоматического способа управления, сохранены в устройстве 18 управления или по известным параметрам рассчитываются устройством 18 управления. При способе подготовки осуществляются все необходимые этапы для автоматического способа управления и определяются отсутствующие параметры, так что последующий способ управления осуществляется автоматически без вмешательства оператора.
В процессе осуществления способа управления пильное полотно 6 входит в подлежащую обработке основу 2 между первой конечной точкой EA и второй конечной точкой EB разделительной линии вплоть до конечной глубины резания. Разделение основы 2 происходит до конечной глубины резания за один или несколько разрезов. Первый разрез осуществляется за два этапа, если стартовая позиция пильного блока 3 лежит между первой конечной точкой EA и второй конечной точкой EB разделительной линии, причем на первом этапе создается разделительная линия между точкой старта и первой конечной точкой EA в направлении 16 подачи и на втором этапе создается разделительная линия между точкой старта и второй конечной точкой EB против направления 16 подачи. Другие разрезы осуществляются между первой конечной точкой EA и второй конечной точкой EB попеременно в направлении 16 подачи и против направления 16 подачи. Устройство 18 управления устанавливает глубину резания отдельных резок и определяет угол поворота консоли 5 пилы, соответствующий глубине резания.
Оператор запускает способ управления на этапе S1 посредством устройства 11 обслуживания. Консоль 5 пилы на этапе S2 посредством приводного устройства 17 передвигается в позицию, соответствующую углу поворота первого разреза, причем консоль 5 пилы предпочтительно расположена в тянущем положении. На этапе S3 передающий блок 31 и принимающий блок 33 системы 23 измерения расстояния с помощью лазера активируются устройством 18 управления и пильный блок 3 на этапе S4 с помощью приводного устройства 17 двигается вдоль направляющего рельса 13. Для случая, когда система 23 измерения расстояния с помощью лазера активирована постоянно, этап S3 может выпадать, соответственно может заменяться контрольным циклом, при котором устройство 18 управления проверяет, активирована ли система 23 измерения расстояния с помощью лазера.
На этапе S5 проверяется, принял ли принимающий блок 33 позиционный сигнал. Если принимающий блок 33 не принял ни одного позиционного сигнала (N в S5), способ продолжается на этапе S4. Если принимающий блок 33 принял позиционный сигнал (J в S5), принимающий блок 33 на этапе S6 передает информацию, соответствующую позиционному сигналу, устройству 35 обработки. Устройство 35 обработки на этапе S7 на основе позиционного сигнала рассчитывает расстояние от фактической позиции до первой конечной точки EA разделительной линии и на этапе S8 отдает команду управления приводному устройству 17, чтобы переместить пильный блок 3 на рассчитанное расстояние вдоль направляющего рельса 13. Устройство 18 управления запускают на этапе S9 с помощью устройства 19 для измерения расстояний, т.е. измерения пути, который проделывают направляющие каретки 15 вдоль направляющего рельса 13.
На этапе S10 рассчитанное на этапе S7 расстояние сравнивается с путем, измеренным устройством 19 для измерения расстояния, и таким образом проверяется, соответствует ли измеренный путь расстоянию, рассчитанному по позиционному сигналу. Если путь, измеренный устройством 19 для измерения расстояния, не достигает рассчитанного расстояния (N в S10), способ продолжается на этапе S10. Если измеренный путь соответствует рассчитанному расстоянию (J в S10), на этапе S11 движение подачи пильного блока 3 заканчивается.
После окончания разреза на этапе S12 устройство 18 управления проверяет, достигнута ли конечная глубина разреза разделительной линии. Если конечная глубина разреза разделительной линии не достигнута (N в S12), пильный блок 3 на этапе S13 посредством приводного устройства 17 перемещается на разность длин в позицию, которая соответствует относящемуся к ней углу поворота консоли 5 пилы, и консоль 5 пилы поворачивается в позицию, соответствующую углу поворота. Направление движения меняется, и консоль 5 пилы, предпочтительно, снова располагается в тянущем положении. Угол поворота и разность длин так взаимно согласованы, что конец пильного полотна 6 совпадает с конечной точкой разделительной линии. После этапа S13 способ продолжается на этапе S3. Если конечная глубина разреза разделительной линии достигнута (J в S12), консоль 5 пилы на этапе S14 отводится из основы 2 и перемещается в исходную позицию или предопределенную позицию. После этапа S14 предложенный в соответствие с изобретением способ закончен.
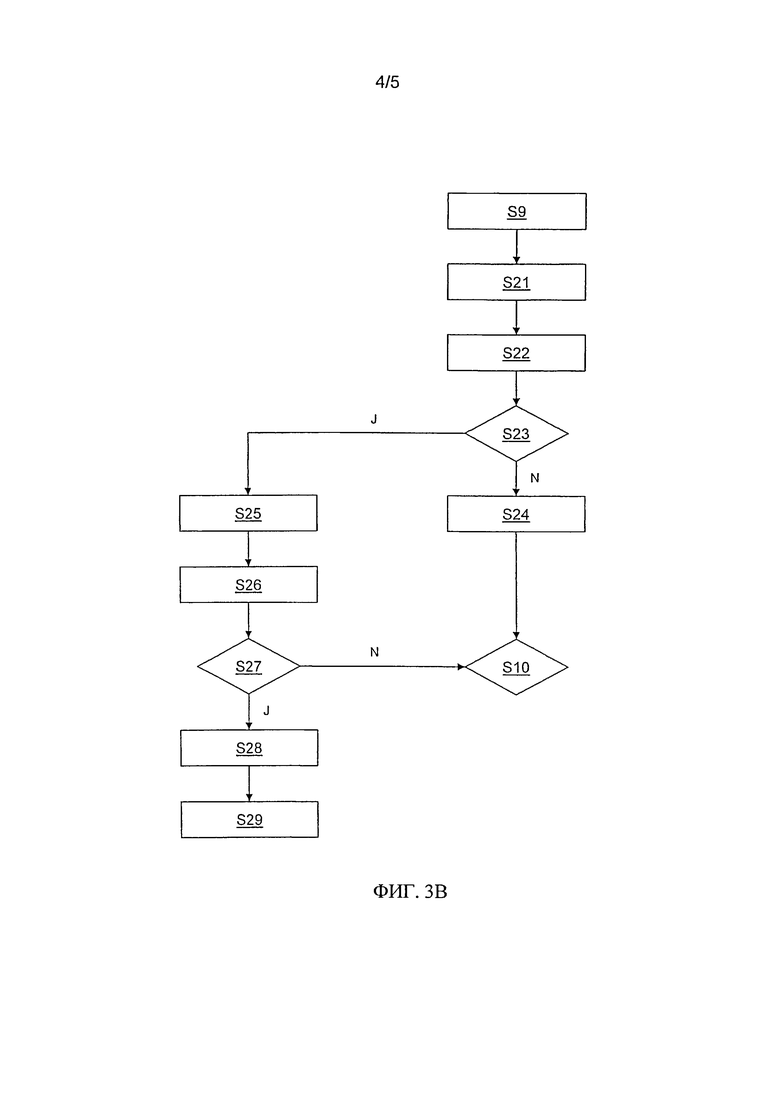
В усовершенствованном варианте система 23 измерения расстояния с помощью лазера предоставляет возможность проверки точности движения подачи и при необходимости ее повышения. Фиг.3B показывает контрольный цикл, который в способе на фиг.3A может осуществляться между этапами S9 и S10.
На этапе S21 устройство 18 управления активирует передающий блок 31 и принимающий блок 33 системы 23 измерения расстояния с помощью лазера. Передающий блок 31 на этапе S22 посылает по команде устройства 18 управления дополнительный лазерный луч 32 к измеряемому объекту 24. На этапе S23 проверяется, принял ли принимающий блок 33 дополнительный позиционный сигнал. Если принимающий блок 33 не принял никакого дополнительного позиционного сигнала (N в S23), пильный блок 3 на этапе S24 перемещается на расстояние, определенное на основании позиционного сигнала, и способ продолжается в соответствии с этапом S10.
Если принимающий блок 33 принял дополнительный позиционный сигнал (J в S23), на этапе S25 принимающий блок 33 передает информацию, соответствующую дополнительному позиционному сигналу, блоку 35 обработки, который на этапе S26 определяет расстояние актуальной фактической позиции относительно конечной точки EA. На этапе S27 расстояние, определенное на основе дополнительного позиционного сигнала, сравнивается с расстоянием, которое получается в виде разности первого расстояния и пути, измеренного устройством 19 для измерения, и проверяется, превышено ли заданное отклонение. Если заданное отклонение не превышено (N в S27), способ продолжается на этапе S10. Если заданное отклонение превышено (J в S27), на этапе S28 устройство 18 управления отдает команду управления приводному устройству 17 переместить пильный блок 3 на расстояние, определенное на основании дополнительного позиционного сигнала. Приводное устройство 17 перемещает пильный блок 3 на этапе S29 на новое расстояние.
Фиг.4 показывает другую форму осуществления индикаторного устройства 41, состоящего из оптического индикаторного элемента 42, сенсорного устройства 43 и измеряемого объекта 44. Оптический индикаторный элемент 42 выполнен аналогично оптическому индикаторному элементу 22 на фиг.2A в виде детали из листа с задней кромкой 25, передней кромкой 26 и острия 27 стрелки и оптически указывает оператору конечную точку EA разделительной линии.
Сенсорное устройство 43 выполнено в виде индуктивного выключателя, срабатывающего при приближении. Индуктивный выключатель 43, срабатывающий при приближении, состоит из корпуса 45, генератора колебаний 46 и электронного блока 47, который включает мультивибратор 48 и усилитель 49. Генератор колебаний 46 создает высокочастотное переменное поле, которое выходит на активную поверхность 50 из корпуса 45 индуктивного выключателя 43, срабатывающего при приближении.
Измеряемый объект 44 выполнен в форме стержня и состоит из проводящего электрический ток материала, как, например, стали, меди или алюминия. На первом конце измеряемый объект 44 соединен с оптическим индикаторным элементом 42. Второй конец измеряемого объекта 44 маркирует точку начала отсчета RA, которая имеет известное расстояние dA до конечной точки EA разделительной линии. Расстояние dA точки начала отсчета RA до конечной точки EA сохранено в памяти устройства 18 управления.
Если измеряемый объект 44, проводящий электрический ток, попадает в переменное поле генератора 46, в измеряемом объекте 44 возникает индуктивное вихревое напряжение и течет вихревой ток. Благодаря вихревому току у генератора 46 забирается энергия, что ведет к уменьшению амплитуды колебаний генератора 46. Уменьшение амплитуды колебаний оценивается в электронном блоке 47 и преобразуется в однозначный коммутационный сигнал.
Сенсорное устройство 43 и измеряемый объект 44 вместе образуют генератор 51 сигнала и детекторное устройство 52, которое взаимодействует с генератором 51 сигнала. Генератор колебаний 46 и проводящий электрический ток измеряемый объект 44 образуют генератор 51 сигнала, который создает позиционный сигнал, соответствующий положению точки RA начала отсчета. Детекторное устройство 52 состоит из электронного блока 47. Детекторное устройство 52 принимает позиционный сигнал и осуществляет обработку.
Изобретение относится к разделительным устройствам, в частности устройству для разделения основы вдоль разделительной линии. Техническим результатом является усовершенствование устройства для разделения основы вдоль разделительной линии. Устройство для разделения основы вдоль разделительной линии между первой конечной точкой (EA) и второй конечной точкой (EB), включающее пильный блок с пильным полотном, которое может вращаться вокруг оси вращения, направляющую каретку для движения пильного блока вдоль направляющего рельса, устройство управления для управления пильным блоком и направляющей кареткой, и первое индикаторное устройство, которое маркирует первую конечную точку (EA) разделительной линии. При этом предусмотрено второе индикаторное устройство, которое маркирует вторую конечную точку (EB) разделительной линии. Причем первое и второе индикаторные устройства имеют оптический индикаторный элемент, который оптически маркирует конечную точку (EA, EB), генератор сигнала и детекторное устройство, причем генератор сигнала посылает позиционный сигнал, соответствующий положению конечной точки (EA, EB) или положению точки начала отсчета (RA, RB), которая расположена на определенном расстоянии (dA, dB) от конечной точки (EA, EB), а детекторное устройство принимает позиционный сигнал генератора сигнала. 2 н. и 6 з.п. ф-лы, 4 ил.
1. Устройство (1) для разделения основы (2) вдоль разделительной линии между первой конечной точкой (EA) и второй конечной точкой (EB), включающее
пильный блок (3) с пильным полотном (6), которое может вращаться вокруг оси (7) вращения,
направляющую каретку (15) для движения пильного блока (3) вдоль направляющего рельса (13),
устройство (18) управления для управления пильным блоком (3) и направляющей кареткой (15), и
первое индикаторное устройство (21А; 41), которое маркирует первую конечную точку (EA) разделительной линии,
отличающееся тем, что предусмотрено второе индикаторное устройство (21В; 41), которое маркирует вторую конечную точку (EB) разделительной линии,
причем первое и второе индикаторные устройства (21А, 21В; 41) имеют оптический индикаторный элемент (22; 42), который оптически маркирует конечную точку (EA, EB), генератор (23; 43) сигнала и детекторное устройство (24; 44), причем генератор (23; 43) сигнала посылает позиционный сигнал, соответствующий положению конечной точки (EA, EB) или положению точки начала отсчета (RA, RB), которая расположена на определенном расстоянии (dA, dB) от конечной точки (EA, EB), а детекторное устройство (24; 44) принимает позиционный сигнал генератора (23; 43) сигнала.
2. Устройство по п. 1, отличающееся тем, что детекторное устройство (38; 52) может соединяться с устройством управления (18) и передает информацию, соответствующую позиционному сигналу генератора (23; 43) сигнала, устройству (18) управления.
3. Устройство по п. 1, отличающееся тем, что детекторное устройство первого индикаторного устройства (21А) и детекторное устройство второго индикаторного устройства (21В) выполнены в виде общего детекторного устройства.
4. Устройство по одному из пп. 1-3, отличающееся тем, что первое индикаторное устройство (21А) и/или второе индикаторное устройство (21В) может перемещаться с помощью устройства (29) для перемещения по направляющему рельсу (13).
5. Устройство по п. 1, отличающееся тем, что механический концевой упор (30) соединен с оптическим индикаторным элементом (22) первого и/или второго индикаторного устройства (21А, 21В).
6. Устройство по п. 1, отличающееся тем, что генератор (23) сигнала содержит передающий блок (33), который передает измерительный луч (34), и измеряемый объект (32), а детекторное устройство (24) имеет принимающий блок (35) и устройство (37) для обработки данных.
7. Устройство по п. 6, отличающееся тем, что передающий блок (33), принимающий блок (35) и устройство (37) для обработки данных образуют систему (31) для измерения расстояния с помощью лазера или систему для измерения расстояния с помощью ультразвука.
8. Способ управления разделительным устройством (1) по одному из пп. 1-7, которое разделяет основу (2) вдоль разделительной линии между первой конечной точкой (EA) и второй конечной точкой (EB), при котором позиционный сигнал, который соответствует положению первой конечной точки (EA), генерируется генератором (23, 43) сигнала и принимается детекторным устройством (24; 44), информация, соответствующая позиционному сигналу, передается устройству (18) управления и приводное устройство (17) соответственно управляется устройством (18) управления.
| DE 29620173 U1, 23.01.1997 | |||
| US 20080276773 A1, 13.11.2008 | |||
| Плавучее швартовное устройство Баранова В.М. | 1989 |
|
SU1693173A1 |
| WO 2009108093 A1, 03.09.2009. | |||

