Предлагаемое изобретение относится к оборудованию гидротехнических сооружений, например, гидроэлектрических станций - ГЭС. Техническим результатом предлагаемого изобретения является увеличение быстродействия и увеличение надежности.
Известно, что напорные трубопроводы и водоводы применяются в различного рода гидроэлектрических станциях (П.С.Непорожний, В.И.Обрезков. Введение в специальность гидроэлектро-энергетика, М.: Энергоатомиздат, 1982 г.) [1].
Известно также, что для перекрытия напорных трубопроводов и водоводов применяются затворы (И.Н.Смирнов. Гидравлические турбины. Государственное энергетическое издательство, Москва-Ленинград, 1956, стр.30, фиг.16) [2]. Устройства в упомянутых источниках являются аналогами предлагаемому изобретению.
Известно, что затвор может перекрывать поток воды в трубопроводах в оперативном режиме, например, для ремонта гидротурбины, когда скорость перекрытия не имеет значения, и в аварийном режиме, когда необходимо срочно перекрывать поток воды и предотвращать подвод воды к гидротурбине. Однако в аналогах нет информации о скорости перекрытия затвором потока воды. Кроме того, в аналогах нет информации о вероятности отказа при выполнении перекрытия затвором трубопровода, что особенно важно при возникновении аварии. Следовательно, аналоги при осуществлении не обеспечивают достижение заявленного технического результата - увеличение быстродействия и надежности. Нет информации о скорости перекрытия потока воды в трубопроводах и водоводах и вероятности отказа механизмов затворных устройств при этом перекрытии также и в других просмотренных патентных материалах, например в авторских свидетельствах №673695, 675122, 1213121, 1756456, 1781374, а также в патентах №2040634, 2062318. Поэтому в качестве прототипа выбрано другое устройство (Бутин В.П. Аварийное затворное устройство напорного водовода. Патент РФ №2062319 от 01.03.1994, опубликовано 20.06.1996, фиг.1) [3], в котором целью изобретения является сокращение времени перекрытия водовода, для чего в плоский вертикально расположенный затвор введены пригрузочные пластины. Однако в прототипе нет информации о способе управления затвором, который мог бы ускорить перекрытие водовода. Кроме того, в прототипе также нет информации о вероятности отказа при выполнении перекрытия затвором водовода.
Однако в прототипе отмечается, что при возникновении аварии включается механизм маневрирования, и затвор опускается вниз, при этом: во-первых, механизм маневрирования может замедлять скорость опускания затвора и перекрытия водовода, вероятно, по этой причине и предлагается применить пригрузочные пластины; во-вторых, механизм маневрирования может отказать; в-третьих, в аварийной ситуации может произойти разрушение источника питания механизма маневрирования. Следовательно, прототип также не гарантирует увеличение быстродействия и увеличение надежности.
Таким образом, и аналоги, и прототип имеют недостатки, которые заключаются в том, что они не могут обеспечивать высокую скорость перекрытия потока воды, а следовательно, и высокую скорость предотвращения подвода воды к гидротурбине, а также не могут повысить вероятность такого перекрытия, а следовательно, и надежность работы затвора. Поэтому аналоги и прототип при осуществлении не обеспечивают достижения заявленного технического результата, заключающегося в повышении быстродействия и надежности работы аварийного затворного устройства.
Предлагаемое изобретение решает задачу создания аварийного затворного устройства, осуществление которой позволяет достичь заявленного технического результата, заключающегося в повышении быстродействия и надежности работы устройства.
Сущность предлагаемого изобретения - аварийного затворного устройства водяного напорного трубопровода, которое состоит из вертикального плоского затвора, установленных на стенках водовода направляющих вертикальных пазов и механизма маневрирования, заключается в том, что механизм маневрирования выполнен из двух механически соединенных частей - подъемной части и удерживающей части, при этом в качестве подъемной части может быть использован подъемный кран любого типа соответствующей грузоподъемности с системой управления, а удерживающая часть содержит магнитопровод, катушку и якорь, а также систему управления и коммутационный аппарат для подключения напряжения от источника питания собственных нужд к удерживающей части, а именно к катушке магнитопровода, при этом в систему управления удерживающей части входит датчик аварийных режимов, а якорь магнитопровода жестко соединен с вертикальным плоским затвором.
Заявленный технический результат - увеличение быстродействия и увеличение надежности работы аварийного затворного устройства достигается следующим образом. Выполнение механизма маневрирования аварийного затворного устройства из двух механически соединенных частей - подъемной части и удерживающей части позволяет в оперативном спокойном режиме без временных ограничений при подаче питающего напряжения на катушку магнитопровода с помощью подъемной части поднять удерживающую часть вместе с якорем и вертикальным плоским затвором в крайнее верхнее положение, т.е. открыть аварийное затворное устройство и обеспечить подвод воды к гидротехническому объекту, например к гидротурбине. При возникновении аварийной ситуации, в том числе и при разрушении источника питающего напряжения собственных нужд, когда от затворного устройства требуется максимальное быстродействие, предложенное исполнение затворного устройства позволяет быстро отключить питающее напряжение от катушки магнитопровода, что приводит к исчезновению электромагнитной силы между якорем и магнитопроводом и к быстрому перемещению якоря и затвора по вертикальным направляющим пазам из крайнего верхнего в крайнее нижнее положение, т.е. закрыть затворное устройство и предотвратить подвод воды к гидротурбине. При этом скорость срабатывания затворного устройства достаточно велика, т.к. она определяется примерно скоростью свободного падения и не зависит от работы механизма маневрирования, а именно от работы подъемной части. Все это приводит к увеличению скорости срабатывания, т.е. к увеличению быстродействия. Перемещение затвора в нижнее крайнее положение независимо от работы механизма маневрирования, т.е. подъемной части, исключает влияние возможных отказов в механизме маневрирования, что приводит к увеличению надежности работы устройства. Надежность увеличивается также от того, что при разрушении источника питающего напряжения собственных нужд также обеспечивается быстрое перемещение затвора в крайнее нижнее положение независимо от работы механизма маневрирования.
Сущность предлагаемого в изобретении способа управления работой аварийного затворного устройства водяного напорного трубопровода заключается в том, что в исходном состоянии с помощью подъемной части в оперативном режиме без временных ограничений магнитопровод с катушкой опускают в крайнее нижнее положение до соприкосновения магнитопровода и якоря удерживающей части, при этом якорь, жестко соединенный с вертикальным плоским затвором, находится в крайнем нижнем положении, соответствующем закрытому состоянию затвора, затем подают напряжение от источника питания собственных нужд на катушку магнитопровода, что вызывает притяжение якоря с вертикальным плоским затвором к магнитопроводу, затем поднимают магнитопровод, катушку и якорь удерживающей части, а вместе с ними и вертикальный плоский затвор в крайнее верхнее положение, т.е. полностью открывают затворное устройство и обеспечивают подвод воды к гидротехническому объекту, например гидротурбине, а при появлении сигнала от датчика аварий о возникновении аварийной ситуации или разрушении источника питания собственных нужд, когда от затворного устройства требуется максимальное быстродействие, формируют сигнал об отключении питающего напряжения от удерживающей части, а именно от катушки магнитопровода, что приводит под действием собственного веса к немедленному перемещению вертикального плоского затвора вместе с якорем магнитопровода из крайнего верхнего в крайнее нижнее положение, т.е. к закрыванию аварийного затворного устройства, а следовательно, к предотвращению подвода воды к гидротехническому объекту, например гидротурбине.
Заявленный технический результат - увеличение быстродействия и увеличение надежности достигается следующим образом. В исходном предаварийном состоянии без временных ограничений с помощью подъемной части механизма маневрирования, при подаче питающего напряжения на катушку магнитопровода, удерживающую часть - магнитопровод, катушку, якорь и вертикальный плоский затвор поднимают в крайнее верхнее положение, при этом якорь оказывается притянутым к магнитопроводу вместе с аварийным плоским затвором. При появлении сигнала от датчика аварий о возникновении аварийной ситуации или разрушении источника питающего напряжения собственных нужд формируют сигнал об отключении питающего напряжения, что, как уже отмечено выше, приводит под действием собственного веса к немедленному перемещению якоря и вертикального плоского затвора из крайнего верхнего положения в крайнее нижнее положение, а это приводит к быстрому закрыванию аварийного затворного устройства и предотвращению подвода воды к гидротехническому объекту, например гидротурбине. Следовательно, достигается увеличение быстродействия, т.к. перемещение затвора в крайнее нижнее положение зависит только от скорости падения и не зависит от работы механизма маневрирования. Одновременно достигается увеличение надежности, т.к. перемещение в нижнее крайнее положение, т.е. закрывание затворного устройства не зависит от вероятности отказа механизма маневрирования. Надежность увеличивается и от того, что при разрушении источника питающего напряжения собственных нужд также обеспечивается перемещение затвора в крайнее нижнее положение независимо от работы механизма маневрирования.
Таким образом, заявленное аварийное затворное устройство обеспечивает достижение заявленного технического результата - увеличение быстродействия и надежности.
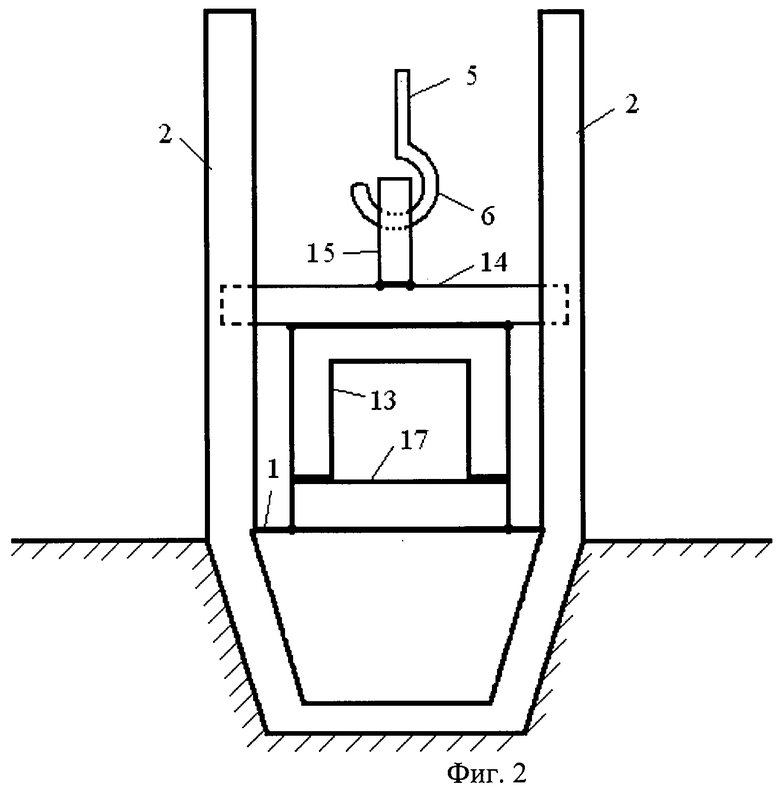
Предлагаемое аварийное затворное устройство водяного напорного трубопровода приведено на фиг.1, 2, 3 и 4. Пример исполнения устройства приведен на фиг. 1 и содержит вертикальный плоский затвор 1, направляющие вертикальные пазы 2, которые для упрощения не показаны на фиг.1, но показаны на фиг. 2, 3, 4, подъемную часть 3 механизма маневрирования, которая установлена на несущей конструкции 4 (в качестве подъемной части может быть использован подъемный кран любого типа соответствующей грузоподъемности), грузоподъемный канат 5, механический захват 6 и вертикальные упоры 7, блок управления подъемной частью 8, кнопку включения и отключения 9 для спуска груза подъемной части, кнопку включения и отключения 10 для подъема груза подъемной части, датчик крайнего верхнего положения 11, датчик крайнего нижнего положения 12, магнитопровод 13 с грузоподъемной пластиной 14 и грузоподъемным стержнем 15 удерживающей части, катушку 16 и якорь 17 магнитопровода удерживающей части, источник питающего напряжения 18, коммутационный аппарат 19, датчик тока 20, блок управления 21 коммутационным аппаратом, кнопку включения и отключения 22 коммутационного аппарата, датчик аварийных режимов 23, аварийный звуковой информационный сигнализатор 24 и аварийное световое информационное табло 25, при этом подъемная часть 3 и вертикальные упоры 7 жестко соединены с несущей конструкцией 4, грузоподъемная плита 14 жестко соединена с грузоподъемным стержнем 15 и магнитопроводом 13, якорь 17 жестко соединен с вертикальным плоским затвором 1, подъемная часть 3 и магнитопровод 13 - с катушкой 16 посредством грузоподъемного каната 5, механического захвата 6, грузоподъемного стержня 15 и грузоподъемной пластины 14 механически соединены между собой, датчик крайнего верхнего положения 11 жестко соединен с одним из вертикальных упоров 7, датчик крайнего нижнего положения 12 жестко соединен с одним из торцов якоря 17, при этом выходной вывод 27 блока управления 8 соединен с входным управляющим выводом подъемной части 3, выходной вывод 28 кнопки включения и отключения 9 соединен с первым входным выводом блока управления 8 подъемной частью 3, выходной вывод 29 кнопки включения и отключения 10 соединен со вторым входным выводом блока управления 8 подъемной частью 3, выходной управляющий вывод 30 датчика тока 20 соединен с третьим входным выводом блока управления 8 подъемной частью 3, первый выходной вывод 31 датчика крайнего нижнего положения 12 соединен с четвертым входным выводом блока управления 8 подъемной частью 3, выходной вывод 32 датчика крайнего верхнего положения 11 соединен с пятым входным выводом блока управления 8 подъемной частью 3, входные силовые выводы коммутационного аппарата 19 удерживающей части соединены с силовыми выходными выводами 33 источника питающего напряжения 18, а выходные силовые выводы 34 коммутационного аппарата 19 соединены с входными выводами катушки 16 удерживающей части, причем в эту цепь последовательно силовыми выводами включен датчик тока 20, второй выходной вывод 35 датчика крайнего нижнего положения 12 соединен с первым входным выводом блока управления 21 коммутационного аппарата 19, выходной вывод 36 кнопки включения и отключения 22 удерживающей части соединен со вторым входным выводом блока управления 21 коммутационного аппарата 19, выходной вывод 37 датчика аварий 23 удерживающей части соединен с третьим входным выводом блока управления 21 коммутационного аппарата 19 удерживающей части, первый выходной вывод 38 блока управления 21 коммутационного аппарата 19 соединен с управляющим входным выводом коммутационного аппарата 19, второй выходной вывод 39 блока управления 21 соединен с входным выводом аварийного звукового информационного сигнализатора 24, третий выходной вывод 40 блока управления 21 соединен с входным выводом аварийного светового информационного табло 25, а четвертый выходной вывод 26 блока управления 21 соединен с блоком управления водопропускного шлюза, который на фиг. 1 не показан.
Таким образом, подъемная часть механизма маневрирования аварийного затворного устройства без учета некоторых конструктивных элементов содержит следующие главные элементы: собственно подъемная часть 3, кнопка 9 включения и отключения при спуске груза, кнопка 10 включения и отключения при подъеме груза и блок управления 8 подъемной частью 3. Аналогично удерживающая часть механизма маневрирования без учета некоторых конструктивных элементов содержит следующие главные элементы: магнитопровод 13, катушка 16, якорь 17, источник питания 18, коммутационный аппарат 19, блок управления 21 коммутационным аппаратом 19, кнопка 22 включения и отключения, датчик аварий 23, звуковой сигнализатор 24 и световое табло 25. Датчик 11 крайнего верхнего положения, датчик 12 крайнего нижнего положения и датчик тока 20 являются общими для подъемной и удерживающей частей механизма маневрирования.
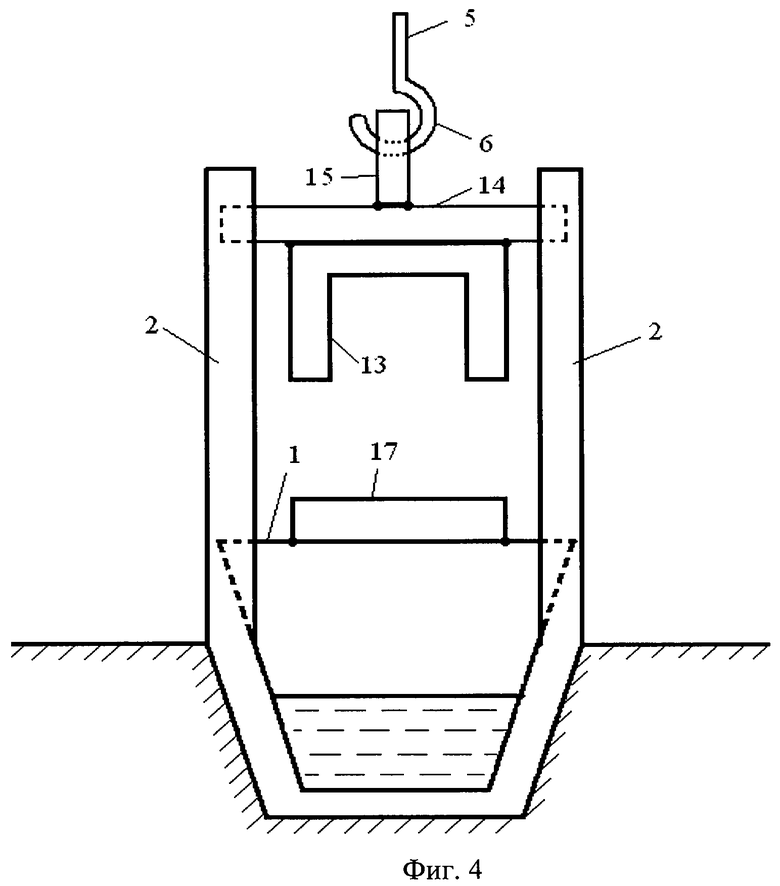
Работает аварийное затворное устройство следующим образом, причем эта работа состоит из двух главных операций - открывание затворного устройства, т.е. подъем затвора 1 в крайнее верхнее положение и обеспечение подвода воды к гидротехническому объекту, например гидротурбине, и закрывание затворного устройства, т.е. опускание затвора 1 в крайнее нижнее положение и предотвращение подвода воды к гидротехническому объекту, например гидротурбине. Все остальные операции вспомогательные и выполняются они для обеспечения двух главных указанных выше операций. В исходном состоянии затворное устройство закрыто, затвор 1 с якорем 17 находятся в крайнем нижнем положении, а магнитопровод 13 с катушкой 16 находится в крайнем верхнем положении. Это состояние затворного устройства показано на фиг. 1.
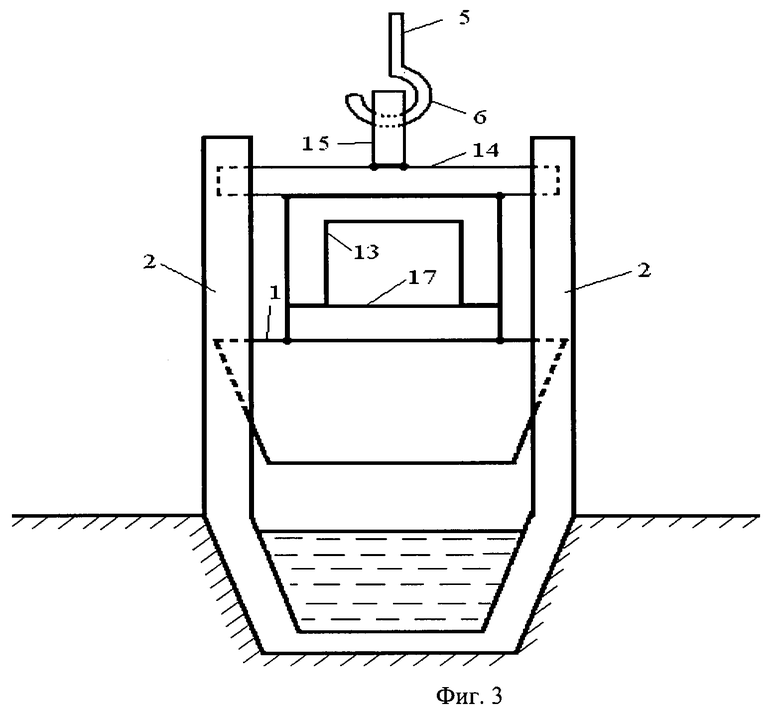
Рассмотрим операцию открывания затворного устройства в предположении, что выполнение этой операции полностью автоматизировано. Кнопкой 9 через вывод 28 на блок управления 8 подъемной частью 3 подается сигнал об опускании магнитопровода 13 с катушкой 16 в крайнее нижнее положение, который передается от блока управления 8 через вывод 27 на подъемную часть 3, последняя опускает магнитопровод 13 с катушкой 16 в крайнее нижнее положение, схематично показанное на фиг.2. После этого с датчика крайнего нижнего положения 12 по выводу 31 на блок управления 8 и по выводу 35 на блок управления 21 поступают сигналы о том, что магнитопровод 13 с катушкой 16 опущен в крайнее нижнее положение. После этого блок управления 8 формирует и через вывод 27 передает сигнал подъемной части 3 о прекращении опускания магнитопровода с катушкой 16, а блок управления 21 формирует и передает по выводу 38 сигнал о включении коммутационного аппарата 19, который подключает напряжение от источника питания 18 собственных нужд к катушке 16, при этом якорь 17 притягивается к магнитопроводу 13, а через выводы 33 и 34 будет протекать ток питания катушки 16, который будет нарастать по экспоненте, определяемой активным и индуктивным сопротивлением катушки 16, при этом от датчика тока 20 по выводу 30 к блоку управления 8 поступит сигнал о протекании тока по цепи 33, 34. После этого блок управления 8 при наличии сигналов от датчика крайнего нижнего положения 12 и датчика тока 20 формирует и передает через вывод 27 сигнал подъемной части 3 о подъеме магнитопровода 13, катушки 16, якоря 17 и затвора 1 из крайнего нижнего положения в крайнее верхнее положение, показанное схематично на фиг. 3. После этого от датчика крайнего верхнего положения 11 через вывод 32 на блок управления 8 поступает сигнал о том, что выше указанные элементы 13, 16, 17 и 1 находятся в крайнем верхнем положении, что соответствует открытому состоянию затворного устройства. Блок управления 8 формирует и через вывод 27 передает подъемной части 3 сигнал о прекращении подъема указанных выше элементов и постановке всего груза подъемной части, состоящего из элементов 5, 6, 15, 14, 13, 16, 17 и 1, на механическую защелку, например, с использованием храпового механизма (могут быть применены и другие виды защелок или стопорных устройств, например, гидравлических или пневматических). На этом первая операция - открывание затворного устройства и подвод воды к гидротехническому объекту, например гидротурбине, заканчивается. После этого затворное устройство находится в ждущем состоянии, в котором элементы 5, 6, 15, 14, 13 и 16 удерживаются в крайнем верхнем положении механической защелкой без затраты энергии на удержание, а якорь 17 и затвор 1 удерживаются в крайнем верхнем положении с затратой энергии, расходуемой катушкой 16. Для уменьшения этой энергии и необходимо применение механической защелки. Если при выполнении первой операции - открывания затворного устройства происходит отказ в устройствах автоматики, прежде всего блоков управления 8 и 21, то, во-первых, можно в оперативном режиме воспользоваться кнопками 9, 10 и 22 ручного оперативного управления; во-вторых, аварийная ситуация при этом не может возникнуть, а будет иметь место лишь незапуск в работу гидротехнического объекта.
Вторая важная операция - закрывание затворного устройства и предотвращение подвода воды к гидротехническому объекту, например гидротурбине, выполняется, как правило, только при возникновении аварийной ситуации.
При необходимости оперативного закрывания затворного устройства для целей профилактики или ремонта его можно выполнить путем соответствующего взаимодействия между подъемной и удерживающей частями механизма маневрирования следующим образом. Для этого с помощью кнопки 9 оператором подается сигнал на подъемную часть 3 о спуске из крайнего верхнего положения в крайнее нижнее положение магнитопровода 13, катушки 16, якоря 17 и затвора 1, что приводит к закрыванию затворного устройства, затем с помощью кнопки 22 оператором подается сигнал об отключении коммутационным аппаратом 19 питающего напряжения от катушки 16, затем с помощью кнопки 10 оператором подается сигнал подъемной части 3 о подъеме магнитопровода 13 и катушки 16 в крайнее верхнее положение. На этом операция закрывания затворного устройства в оперативном режиме заканчивается.
Закрывание затворного устройства в аварийной ситуации может иметь несколько вариантов.
Первый вариант. Датчик аварий 23 формирует и через вывод 37 передает в блок управления 21 сигнал об аварии, блок управления 21 формирует и через вывод 38 передает сигнал коммутационному аппарату 19 об отключении питающего напряжения источника питания 18 собственных нужд, коммутационный аппарат 19 отключает питающее напряжение от катушки 16, при этом исчезает электромагнитная сила притяжения между якорем 17 и магнитопроводом 13, при этом магнитопровод 13, как отмечено выше, удерживается подъемной частью 3 в крайнем верхнем положении, а якорь 17 и жестко соединенный с ним затвор 1 под воздействием собственного веса немедленно перемещаются из крайнего верхнего положения в крайнее нижнее положение, которое показано на фиг. 1, при этом достаточно быстро закрывается затворное устройство и предотвращается подвод воды к гидротехническому объекту, например гидротурбине. Увеличение быстродействия и надежности обеспечивается тем, что якорь 17 и затвор 1 перемещаются вниз по направляющим пазам 2, как это схематично показано на фиг. 4, со скоростью, близкой к скорости свободного падения, без работы любых механизмов, возможные отказы которых не могут отрицательно повлиять на аварийное закрывание затворного устройства, при этом одновременно от блока управления 21 подаются сигналы об аварии через вывод 39 на звуковой сигнализатор 24 и через вывод 40 на световое табло 25 для информации производственного персонала, а также через вывод 26 на блок управления водопропускным шлюзом для его открывания. Последняя операция необходима для уменьшения силы гидравлического удара в верхнем бьефе водовода, которая возникает при быстром закрывании затворного устройства при определенных геометрических размерах водовода (см. [2] стр.315, 316, 334, 335).
Второй вариант. Произошел отказ датчика аварии 23, поэтому от этого датчика по выводу 37 на блок управления 21 не поступил сигнал об аварии, но произошло разрушение источника 18 питающего напряжения собственных нужд, при этом блок управления 21 формирует и по выводу 38 передает сигнал коммутационному аппарату 19 об отключении напряжения источника питания 18 от катушки 16, и операция закрывания затворного устройства протекает аналогично выше описанному. Если при этом из-за отказа блока управления 21 сигнал об отключении коммутационного аппарата 19 не формируется, то питающее напряжение на катушке 16 все равно исчезает из-за разрушения источника питания 18 собственных нужд и операция закрывания затворного устройства все равно протекает аналогично выше описанному.
Третий вариант. Датчик аварий 23 отказал, а источник питания 18 собственных нужд не разрушен. Если при этом информация об аварии по дублирующим каналам все-таки поступила на звуковой 24 и/или световой 25 сигнализаторы, то производственный персонал может отключить коммутационным аппаратом 19 питающее напряжение источника 18 от катушки 16 с помощью кнопки отключения и включения 22 через вывод 36, блок управления 21 и вывод 38, и операция закрывания затворного устройства снова протекает аналогично выше описанному.
Четвертый вариант. Датчик аварий 23 отказал, источник питания 18 собственных нужд не разрушен, информация об аварии на звуковом 24 и световом 25 сигнализаторах отсутствует. В этом случае производственный персонал может воспользоваться кнопкой включения и отключения 22 для отключения питающего напряжения от катушки 16 только на основании своего опыта и интуиции.
В заключение необходимо заметить:
1. В подъемной части 3 может быть использован подъемный кран любого типа, например электродвигательного, гидравлического, пневматического, а также на основе двигателя внутреннего сгорания.
2. К входным выводам датчика аварии 23, которые для упрощения не приведены на фиг. 1, должны быть подведены выводы измерительных устройств всех параметров работы гидротехнического объекта, аварийное изменение которых требует немедленного прекращения подвода воды к гидротехническому объекту. К таким параметрам на ГЭС могут быть отнесены, например, следующие: токи, напряжения, мощности, в том числе активные и реактивные, интенсивность протекания воды, скорость вращения гидротурбины и гидрогенератора, частота выходного напряжения, температура отдельных блоков и устройств, вибрация отдельных блоков и устройств, в том числе сооружений и зданий и т.д. При появлении на выходных выводах измерительных устройств одного или нескольких аварийных сигналов датчик аварий 23 немедленно формирует и через выходной вывод 37 передает сигнал об аварии в блок управления 21, который формирует и через выходной вывод 38 передает сигнал об отключении коммутационного аппарата 19, что, как описано выше, приводит к закрыванию затворного устройства.
3. Для повышения вероятности закрывания затворного устройства в аварийной ситуации необходимо располагать очистительную машину (см. [2]) в верхнем бьефе по ходу потока воды перед затвором 1, а не за затвором 1.
4. Для повышения вероятности закрывания затворного устройства в аварийной ситуации при отрицательных температурах необходимо очищать от льда затвор 1 и направляющие вертикальные пазы 2, например, скалыванием льда или его растоплением с помощью горячего пара, либо путем покрытия антизамерзающей жидкостью указанных выше затвора 1 и направляющих вертикальных пазов 2.
5. Боковые стенки водовода в верхнем бьефе целесообразно выполнять с небольшим наклоном от отвесной линии, как это показано на фиг. 1, 2, 3, 4, для более плотного закрывания затворного устройства и снижении силы удара при аварийном опускании затвора 1 и якоря 17 по направляющим вертикальным пазам 2.
6. Известно, что электромагнит постоянного тока является более эффективным по сравнению с электромагнитом переменного тока, поэтому для питания катушки 16 удерживающей части целесообразно использовать источник питания 18 постоянного напряжения, при отсутствии такого источника целесообразно к источнику питания 18 подключать выпрямитель, а его выходное постоянное напряжения использовать для питания катушки 16.
7. Для возможности выполнения профилактических и ремонтных работ в удерживающей части механизма маневрирования затворного устройства необходимо последовательно с коммутационным аппаратом 19 включать разъединитель.
8. Для предотвращения сплавления коммутирующих контактов коммутационного аппарата 19 в аварийной ситуации необходимо последовательно с коммутационным аппаратом 19 включать предохранители.
9. Для удобства обслуживающего персонала в системе управления удерживающей части целесообразно иметь датчик и сигнализатор открытого или закрытого состояния затворного устройства.
10. Для уменьшения силы ударов и уменьшения износа перемещаемых частей механизма маневрирования, прежде всего катушки, магнитопровода, якоря и затвора, в системе управления 8 подъемной частью 3 необходимо применять так называемые доводчики или устройства, которые уменьшают скорость перемещения подвижных частей при приближении их к конечной точке движения, в частности к точкам крайнего нижнего и крайнего верхнего положений.
11. Если в качестве подъемной части 3 использован подвижный подъемный кран, например, мостового или козлового типа, то в перерывах между операциями с аварийным затворным устройством, когда оно или закрыто или открыто, выше упомянутый подъемный кран может быть использован для других операций, не связанных с аварийным затворным устройством.
12. С целью уменьшения энергетических затрат для удержания плоского затвора в крайнем верхнем положении в режиме нормальной эксплуатации затвор целесообразно выполнять из легких сплавов и материалов, например из сплавов на основе алюминия и титана, а также пластмасс.
13. При большой скорости закрывания затворного устройства могут быть применены демпферные пластины, расположенные перпендикулярно поверхности затвора с напорной стороны, параллельно линии горизонта и перпендикулярно оси водовода.
14. При недостаточной скорости закрывания могут быть применены пригрузочные пластины, как в прототипе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА НА БЫСТРЫХ НЕЙТРОНАХ | 2013 |
|
RU2539356C2 |
| УСТРОЙСТВО ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА НА БЫСТРЫХ НЕЙТРОНАХ | 2012 |
|
RU2475871C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД КОММУТАЦИОННОГО АППАРАТА | 2004 |
|
RU2262764C1 |
| Устройство для защиты тиристорного преобразователя от аварийных токов | 1989 |
|
SU1742934A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ПРИВОД КОММУТАЦИОННОГО АППАРАТА | 2004 |
|
RU2264673C1 |
| ВЫСОКОВОЛЬТНЫЙ ВАКУУМНЫЙ ВЫКЛЮЧАТЕЛЬ | 2006 |
|
RU2304819C1 |
| УСТРОЙСТВО ОГРАНИЧЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОМАГНИТНЫХ ПРОЦЕССОВ ПРИ АВАРИЙНЫХ РЕЖИМАХ | 1990 |
|
RU2014706C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД КОММУТАЦИОННОГО АППАРАТА (ВАРИАНТЫ) | 2004 |
|
RU2262766C1 |
| КЛАПАН ВОЗДУХОЗАБОРНИКА | 2021 |
|
RU2775763C1 |
| СПОСОБ ДИАГНОСТИКИ ПРОВАЛА КОНТАКТОВ КОММУТАЦИОННОГО АППАРАТА | 2008 |
|
RU2361310C1 |
Изобретение относится к оборудованию гидротехнических сооружений. Аварийное затворное устройство содержит вертикальный плоский затвор, направляющие вертикальные пазы и механизм маневрирования. Механизм маневрирования состоит из подъемной части, выполненной, например, в виде подъемного крана, и удерживающей части с магнитопроводом, катушкой, якорем, а также системой управления и коммутационным аппаратом для подключения напряжения от источника питания собственных нужд к удерживающей части. При этом система управления удерживающей части содержит датчик аварийных режимов, а якорь магнитопровода жестко соединен с вертикальным затвором. Способ управления заключается в том, что для открывания аварийного затворного устройства магнитопровод удерживающей части с помощью подъемной части опускают из крайнего верхнего положения в крайнее нижнее положение и отключают подъемную часть. Затем подают питающее напряжение на катушку удерживающей части и одновременно контролируют ток катушки удерживающей части. При этом при возрастании тока до максимальной величины поднимают удерживающую часть вместе с затвором из крайнего нижнего положения до крайнего верхнего положения, а именно: открывают аварийное затворное устройство. При этом непрерывно подают питающее напряжение на удерживающую часть, обеспечивая открытое состояние аварийного затворного устройства. Для его экстренного закрывания формируют сигнал на отключение питающего напряжения от удерживающей части, что приводит к немедленному перемещению затвора вместе с якорем магнитопровода под действием собственного веса удерживающей части по направляющим вертикальным пазам из крайнего верхнего положения в крайнее нижнее положение. Изобретение обеспечивает увеличение быстродействия и надежности работы устройства. 2 н.п. ф-лы, 4 ил.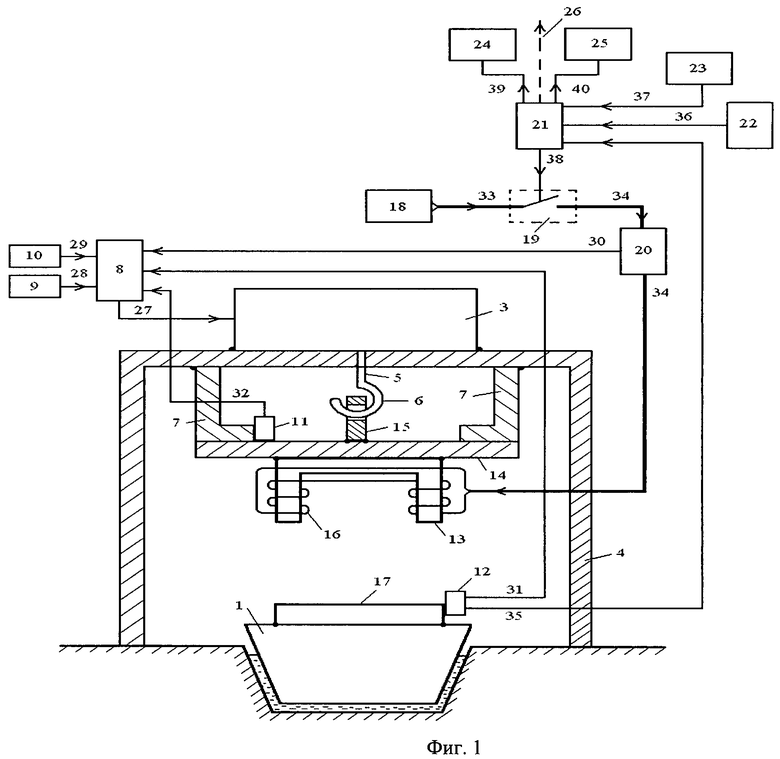
1. Аварийное затворное устройство водяного напорного трубопровода, которое состоит из вертикального плоского затвора, установленных на стенках водовода направляющих вертикальных пазов и механизма маневрирования, отличающееся тем, что механизм маневрирования выполнен из двух механически соединенных частей - подъемной части и удерживающей части, при этом дополнительно введены блок управления подъемной частью с одним выходным и пятью входными выводами, причем под каждым выводом и вводом в элементах схем управления затворным устройством подразумеваются два провода, кнопка включения и отключения с одним выходным выводом для спуска груза подъемной части, кнопка включения и отключения с одним выходным выводом для подъема груза подъемной части, датчик крайнего верхнего положения с одним выходным выводом, датчик крайнего нижнего положения с двумя выходными выводами, магнитопровод удерживающей части, катушка магнитопровода удерживающей части, якорь магнитопровода удерживающей части, источник питающего напряжения собственных нужд удерживающей части с силовыми выходными выводами, коммутационный аппарат удерживающей части с силовыми входными и выходными выводами и одним входным управляющим выводом, датчик тока с входным и выходным силовыми выводами и одним выходным управляющим выводом, блок управления коммутационным аппаратом удерживающей части с четырьмя выходными и тремя входными выводами, кнопка включения и отключения коммутационного аппарата удерживающей части с одним выходными выводом, датчик аварийных режимов удерживающей части с одним выходным выводом, аварийный информационный звуковой сигнализатор удерживающей части с одним входным выводом и аварийное световое информационное табло удерживающей части с одним входным выводом, при этом магнитопровод удерживающей части механически соединен с подъемной частью, якорь удерживающей части жестко соединен с вертикальным плоским затвором, датчик крайнего верхнего положения жестко соединен с подъемной частью, датчик крайнего нижнего положения жестко соединен с одним из торцов якоря удерживающей части, при этом выходной вывод блока управления подъемной части соединен с входным управляющим выводом упомянутой подъемной части, выходной вывод кнопки включения и отключения для спуска груза подъемной части соединен с первым входным выводом блока управления подъемной частью, выходной вывод кнопки включения и отключения для подъема груза подъемной части соединен со вторым входным выводом блока управления подъемной частью, выходной управляющий вывод датчика тока соединен с третьим входным выводом блока управления подъемной частью, первый выходной вывод датчика крайнего нижнего положения соединен с четвертым входным выводом блока управления подъемной частью, выходной вывод датчика крайнего верхнего положения соединен с пятым входным выводом блока управления подъемной частью, входные силовые выводы коммутационного аппарата удерживающей части соединены с силовыми выходными выводами источника питающего напряжения удерживающей части собственных нужд, а выходные силовые выводы упомянутого коммутационного аппарата удерживающей части соединены с входными выводами катушки удерживающей части, причем в эту цепь последовательно с силовыми выводами включен датчик тока, второй выходной вывод датчика крайнего нижнего положения соединен с первым входным выводом блока управления коммутационного аппарата удерживающей частью, выходной вывод кнопки включения и отключения удерживающей части соединен со вторым входным выводом блока управления коммутационного аппарата удерживающей частью, выходной вывод датчика аварий удерживающей части соединен с третьим входным выводом блока управления коммутационного аппарата удерживающей частью, первый выходной вывод блока управления коммутационного аппарата удерживающей частью соединен с управляющим входным выводом коммутационного аппарата удерживающей части, второй выходной вывод блока управления коммутационного аппарата удерживающей частью соединен с входным выводом аварийного звукового информационного сигнализатора удерживающей части, третий выходной вывод блока управления коммутационного аппарата удерживающей частью соединен с входным выводом аварийного светового информационного табло удерживающей части, а четвертый выходной вывод блока управления коммутационного аппарата удерживающей частью соединен с блоком управления водопропускного шлюза.
2. Способ управления работой аварийного затворного устройства водяного напорного трубопровода по п.1, отличающийся тем, что для открывания аварийного затворного устройства магнитопровод удерживающей части с помощью подъемной части опускают из крайнего верхнего положения в крайнее нижнее положение и отключают подъемную часть, затем подают питающее напряжение на катушку удерживающей части и одновременно контролируют ток катушки удерживающей части, а при его возрастании до максимальной величины поднимают удерживающую часть вместе с затвором из крайнего нижнего положения до крайнего верхнего положения, т.е открывают аварийное затворное устройство, затем прекращают подъем удерживающей части и ставят подъемную часть на механическую защелку, при этом непрерывно подают питающее напряжение собственных нужд на удерживающую часть, обеспечивая открытое состояние аварийного затворного устройства, а для экстренного закрывания аварийного затворного устройства при возникновении аварийной ситуации непрерывно контролируют выходной сигнал датчика аварий удерживающей части и при возникновении аварийного режима, а также при разрушении источника питающего напряжения собственных нужд удерживающей части формируют сигнал на отключение питающего напряжения от удерживающей части, что приводит под действием собственного веса к немедленному перемещению затвора вместе с якорем магнитопровода удерживающей части по направляющим вертикальным пазам из крайнего верхнего положения в крайнее нижнее положение, т.е. к закрыванию аварийного затворного устройства, при этом одновременно формируют сигналы об аварии для аварийного звукового информационного сигнализатора удерживающей части и аварийного светового информационного табло удерживающей части, а также для блока управления водопропускного шлюза и открывают этот шлюз.
| RU 2062319 C1, 20.06.1996 | |||
| Устройство для сброса плоского затвора гидротехнического сооружения | 1973 |
|
SU612996A1 |
| Приспособление для отжимания полозков в фильмовом канале кинопроектора | 1938 |
|
SU56538A1 |
| CN 101440886 A, 27.05.2009 | |||
| СПОСОБ ПОЛУЧЕНИЯ ТОВАРНОГО МИНЕРАЛЬНОГО НАПОЛНИТЕЛЯ | 2015 |
|
RU2643550C1 |
| УСТРОЙСТВО ДЛЯ МАНЕВРИРОВАНИЯ ПЛОСКИМ ГИДРОТЕХНИЧЕСКОГО СООРУЖЕНИЯ | 0 |
|
SU407001A1 |
| JP 2006097706 A, 13.04.2006. | |||

