Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и устройству для управления работой силового (приводного) агрегата согласно ограничительной части независимых пунктов формулы изобретения.
Уровень техники
Из DE 19739564 А1 известны способ и устройство для управления работой силового агрегата транспортного средства, в котором по желанию водителя формируют заданное значение момента или мощности, служащее для управления силовым агрегатом, причем определяют максимально допустимый момент или максимально допустимую мощность, а заданное значение ограничивают максимально допустимым значением, если это заданное значение превысило максимально допустимое значение.
Раскрытие изобретения
Предлагаемые в изобретении способ и устройство с отличительными признаками согласно независимым пунктам формулы изобретения имеют по сравнению с упомянутыми выше то преимущество, что для силового (приводного) агрегата задают заданное значение второй выходной переменной (выходной величины) силового агрегата, предпочтительно частоты вращения или скорости, определяют фактическое значение этой второй выходной переменной силового агрегата, сравнивают заданное значение с фактическим значением, в случае, когда превышения заданного значения фактическим значением не установлено, ограничивают первую выходную переменную (выходную величину) первым значением, а в случае, когда установлено превышение заданного значения фактическим значением, эту выходную переменную ограничивают вторым значением, меньшим, чем первое. Таким способом можно реализовать ограничение первой выходной переменной силового агрегата в зависимости от разности между фактическим и заданным значениями второй выходной переменной. При этом, в частности для силового агрегата с регулируемого по частоте вращения или скорости, это позволяет реализовать ограничение первой выходной переменной силового агрегата, отличной от частоты вращения и скорости, в зависимости от разности между фактическим и заданным значениями частоты вращения или в зависимости от разности между фактическим и заданным значениями скорости. Благодаря этому можно, прежде всего, предотвратить сброс блока управления или аварийное выключение силового агрегата при превышении заданного значения частоты вращения фактическим значением частоты вращения или при превышении заданного значения скорости фактическим значением скорости и, тем самым, повысить коэффициент готовности силового агрегата.
Предпочтительные частные варианты осуществления способа, описанного в независимом пункте формулы изобретения, характеризуются мероприятиями, указанными в зависимых пунктах формулы.
При этом в предпочтительном варианте в качестве первого значения выбирают максимально допустимое значение. Таким образом, в случае, когда превышения заданного значения второй выходной переменной ее фактическим значением не установлено, первая выходная переменная может принимать значения из максимально возможного диапазона значений, благодаря чему работа силового агрегата не подвергается никаким ограничениям.
Далее, в предпочтительном варианте осуществления изобретения первую выходную переменную ограничивают вторым значением только в том случае, если фактическое значение второй выходной переменной превышает ее заданное значение более чем на заданное значение смещения. Таким образом, посредством заданного значения смещения устанавливают диапазон допуска. В случае, когда предусмотрен регулятор, стремящийся приводить фактическое значение второй выходной переменной к ее заданному значению, это позволяет гарантировать, что выброс фактического значения за заданное значение второй выходной переменной или динамические процессы в регуляторе, требующие парирования, такого как прекращение резкого падения частоты вращения двигателя внутреннего сгорания, еще не повлекут за собой ограничение первой выходной переменной вторым значением, а значит, рабочий диапазон регулятора не будет ограничен.
Еще одно преимущество достигается, если с увеличением превышения заданного значения фактическим значением выбирать второе значение меньшим. Таким способом можно гибко приводить второе значение в соответствие с разностью фактического и заданного значений второй выходной переменной и, тем самым, максимально отсрочить аварийное выключение силового агрегата или сброс блока управления, что еще больше повысит коэффициент готовности силового агрегата.
Уменьшение второго значения с увеличением превышения заданного значения второй выходной переменной ее фактическим значением особенно просто достигается с помощью линейной зависимости согласно линейной функции с насыщением.
Еще одно преимущество имеет место, если для ограничения первой выходной переменной ограничивать ее заданное значение. Таким способом можно уже в самом начале предотвратить выход фактического значения первой выходной переменной за граничное значение.
Особенно предпочтительный вариант осуществления достигается, если в зависимости от результата сравнения заданного и фактического значений второй выходной переменной регулятор задает заданное значение первой выходной переменной, чтобы привести фактическое значение второй выходной переменной к ее заданному значению, а для ограничения первой выходной переменной ограничивается ее заданное значение. Это позволяет особенно просто интегрировать предлагаемый в изобретении способ в принцип действия регулятора при регулировании фактического значения второй выходной переменной по ее заданному значению, и тем самым избежать нежелательно большого возрастания фактического значения превышения второй выходной переменной сверх ее заданного значения.
Еще одно преимущество достигается, если в случае, когда установлено превышение заданного значения второй выходной переменной ее фактическим значением, проверять, превышает ли фактическое значение первой выходной переменной второе значение, делать в этом случае (при положительном результате проверки) вывод о наличии ошибки и в качестве реакции на ошибку начинать проведение соответствующего мероприятия. Это позволяет гарантировать, что ошибочный рост фактического значения первой выходной переменной можно будет обнаружить и при ограничении заданного значения этой первой выходной переменной вторым значением.
В предпочтительном варианте в качестве первой выходной переменной выбирают вращающий момент, прежде всего индикаторный вращающий момент, либо мощность силового агрегата.
Краткое описание приложенных чертежей
Примеры осуществления настоящего изобретения, поясняемые в приведенном ниже описании, представлены на чертежах, на которых показано:
на фиг.1 - функциональная схема предлагаемого устройства,
на фиг.2 - пример последовательности приемов осуществления предлагаемого в изобретении способа,
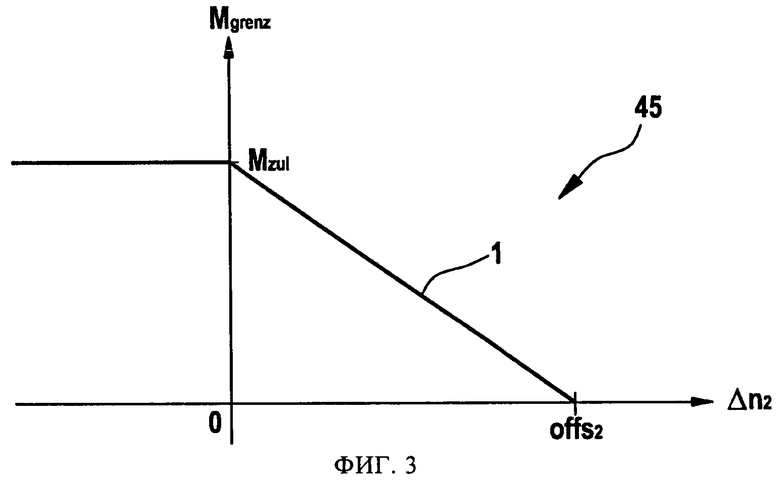
на фиг.3 - кривая зависимости граничного значения вращающего момента силового агрегата от разности значений частоты вращения,
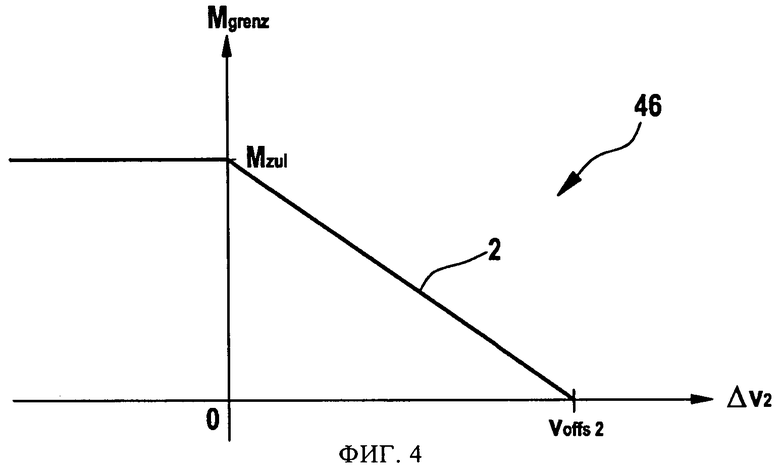
на фиг.4 - кривая зависимости граничного значения вращающего момента силового агрегата от разности значений скорости.
Осуществление изобретения
На фиг.1 показано (в виде функциональной схемы) предлагаемое в изобретении устройство 10 для управления работой силового агрегата. При этом устройство может быть реализовано, например, программными и/или аппаратными средствами в системе управления, например в системе управления силовым агрегатом. Силовой агрегат может включать в себя, например, двигатель внутреннего сгорания, электродвигатель либо комбинированный (гибридный) привод, объединяющий двигатель внутреннего сгорания и электродвигатель. Силовой агрегат может приводить в движение, например, транспортное средство, в частности автомобиль. Вместе с тем, он может приводить в действие и генератор или строительную машину. Предлагаемые в изобретении способ и устройство особенно подходят для управления работой силового агрегата, регулируемого по частоте вращения или скорости. В случае если силовой агрегат представляет собой двигатель внутреннего сгорания, этот двигатель внутреннего сгорания может быть выполнен, например, в виде двигателя с искровым зажиганием или дизельного двигателя. В случае силового агрегата транспортного средства управление им может осуществляться, например по меньшей мере в первом рабочем режиме, в частности в режиме холостого хода, по частоте вращения и/или по меньшей мере во втором рабочем режиме - по скорости. Последнее особенно подходит в случае привода транспортного средства в качестве устройства регулирования скорости движения. Регулирование частоты вращения осуществляют по меньшей мере в первом рабочем режиме. Регулирование скорости осуществляют по меньшей мере во втором рабочем режиме.
Первая выходная переменная силового агрегата, например вращающий момент, мощность или - в случае двигателя внутреннего сгорания - также коэффициент наполнения камеры сгорания, зависящий от частоты вращения и скорости силового агрегата, ограничивается, например, известным из DE 19739564 А1 способом, максимально допустимым значением. При этом в случае вращающего момента речь может идти, например, об индикаторном вращающем моменте. В приводимых ниже примерах предполагается, что первой ограничиваемой выходной переменной силового агрегата является вращающий момент. При этом ограничение может накладываться на фактическое или на заданное значение вращающего момента. В приводимых ниже примерах предполагается, что ограничение накладывается на заданное значение вращающего момента. Этот случай также рассматривается в DE 19739564 А2.
В первом варианте осуществления настоящего изобретения рассматривается силовой агрегат, регулируемый по частоте вращения, а во втором варианте осуществления изобретения рассматривается силовой агрегат, регулируемый по скорости.
Таким образом, в качестве второй выходной переменной силового агрегата в первом примере осуществления изобретения рассматривается частота вращения силового агрегата, а во втором примере осуществления изобретения - скорость транспортного средства, приводимого в движение силовым агрегатом.
На фиг.1 устройство 10 содержит блок 5 формирования заданного значения, формирующий для вращающего момента силового агрегата заданное значение Msoll и передающий его в блок 50 выбора наименьшего значения в качестве входной переменной. Далее, предусмотрен задатчик 20, задающий заданное значение для второй выходной переменной силового агрегата, а именно для частоты вращения nsoll в первом примере осуществления и скорости vsoll во втором примере осуществления.
Устройство 10 описывается ниже в отношении первого примера осуществления изобретения. В случае второго примера осуществления принцип действия устройства является аналогичным, только вместо частоты вращения задают скорость - заданное значение vsoll (например, водителем посредством рычага на рулевой колонке), а фактическое значение скорости vist определяют посредством датчика скорости известным специалисту способом.
В описываемом варианте осуществления задатчик 20 расположен, как показано на фиг.1, вне предлагаемого в изобретении устройства 10, но в альтернативном варианте может находиться и внутри устройства 10.
В первом рабочем режиме, или режиме холостого хода, задатчик 20, соответствующий первому варианту осуществления изобретения, выдает для частоты вращения заданное значение nsoll (холостой ход), подходящее, например, для проверки двигателя на испытательном стенде. В случае транспортного средства это значение может составлять, например, 900 оборотов в минуту. Устройство 10 получает от датчика 30 частоты вращения фактическое значение nist частоты вращения силового агрегата. Фактическое значение nist поступает в блок 25 сравнения устройства 10. Устройство 10 также содержит накопитель 35 значений смещения, из которого считывают первое значение смещения offs1. Это значение добавляют к заданному значению nsoll частоты вращения в сумматоре 60. Полученная сумма nsoll + offs1 также поступает в первый блок 25 сравнения. Первое значение смещения offs1 применяется, например на испытательном стенде, таким образом, что для превышения фактическим значением nist частоты вращения заданного значения nsoll реализуется диапазон допуска, не приводящий к ограничению заданного значения Msoll вращающего момента силового агрегата и, следовательно, не ограничивающий, например, рабочий диапазон регулятора частоты вращения. Первый блок 25 сравнения формирует разность Δn2 между фактическим значением nist частоты вращения и суммой nsoll+offs1 на выходе сумматора 60, так что Δn2=nist-(nsoll+offs1). Разность Δn2 поступает в качестве входной величины в блок 45 однопараметровой характеристики. Блок 45 однопараметровой характеристики и блок 50 выбора наименьшего значения образуют узел 15 ограничения. Кривая 45 однопараметровой характеристики изображена на фиг.3. Здесь кривая 45 отображает зависимость граничного значения Mgrenz от разности Δn2 для заданного значения Msoll вращающего момента силового агрегата. Для значений Δn2, меньше или равных нулю, при этом получают первое граничное значение Mgrenz, тогда как для значений Δn2 больше нуля получают второе граничное значение Mgrenz, которое меньше первого значения. В описанном здесь примере в качестве первого значения выбирают максимально допустимое значение Mzul для вращающего момента силового агрегата. Как известно, например, из DE 19739564 А1, максимально допустимое значение может быть при этом определено (для случая привода транспортного средства) на основе положения педали акселератора и частоты вращения двигателя с помощью многопараметровой характеристики. Второе значение, как уже упоминалось, обычно выбирают меньше первого значения и в соответствии с предпочтительным вариантом осуществления изобретения может уменьшаться с ростом превышения фактическим значением nist частоты вращения суммы, состоящей из заданного значения nsoll частоты вращения и первого значения смещения offs1. При этом второе значение может линейно уменьшаться, например, согласно линейной функции 1 с насыщением (фиг.3), от максимально допустимого значения Mzul при Δn2, равном нулю, до нулевого значения. Это уменьшение может быть и нелинейным. Уменьшение граничного значения Mgrenz с ростом положительного значения разности Δn2 частот вращения может быть реализовано, например на испытательном стенде, таким образом, что посредством ограничения заданного значения Msoll граничным значением Mgrenz предотвращается нежелательный рост фактического значения nist частоты вращения выше ее заданного значения nsoll для любого большего нуля значения разности Δn2 частот вращения. Применение такой кривой, как правило, все же сложнее, чем использование линейной функции с насыщением согласно фиг.3, поскольку эта линейная функция с насыщением может быть особенно просто описана математическим уравнением. Данное уравнение для линейной функции 1 с насыщением имеет вид:

При этом зависимость (1) действует при 0≤Δn2≤offs2. При Δn2≤0 имеет место Mgrenz=Mzul, а при Δn2≥offs2 значение Mgrenz равно нулю. В зависимости от разности Δn2 значений частоты вращения, поступающей в качестве входной величины, блок 45 однопараметровой характеристики выдает, в соответствии с приведенной выше зависимостью, граничное значение Mgrenz в качестве выходной величины. После этого граничное значение Mgrenz передают дальше в блок 50 выбора наименьшего значения. Значение offs2 для разности Δn2 значений частоты вращения, при которой второе граничное значение Mgrenz становится (например, в соответствии с линейной функцией 1) равным нулю, может также применяться, например на испытательном стенде, таким образом, что, во-первых, посредством ограничения вращающего момента силового агрегата предотвращают нежелательный рост фактического значения nist частоты вращения выше его заданного значения nsoll и, во-вторых, граничное значение Mgrenz=0 достигается лишь при максимально большой разности Δn2 значений частоты вращения.
Уменьшение второго значения от максимально допустимого значения Mzul до нуля может, с другой стороны, применяться, например, на испытательном стенде, таким образом, что для соответствующих разностей Δn2 значений частоты вращения в каждом случае получают максимально большое граничное значение Mgrenz.
Блок 50 выбора наименьшего значения выбирает из заданного значения Msoll и граничного значения Mgrenz меньшее и передает его в виде результирующего заданного значения Msollres для последующей обработки с целью преобразования. Это преобразование может осуществляться, например в случае двигателя внутреннего сгорания, посредством регулирования установочных параметров подачи топлива и воздуха, а в двигателе с искровым зажиганием - угла опережения зажигания. Эта последующая обработка может также осуществляться в блоке управления и, следовательно, в устройстве 10 либо в отделенном от него блоке управления.
В соответствии с предпочтительным усовершенствованным вариантом осуществления изобретения внутри или вне устройства 10 может быть дополнительно предусмотрен блок 40 получения данных для определения фактического значения Mist вращающего момента силового агрегата. В этом случае блок получения данных может быть оснащен, известным специалисту образом, подходящими средствами измерений для определения фактического значения Mist вращающего момента либо, в альтернативном варианте и также известным специалисту образом, для создания модели вращающего момента, в которой фактическое значение Mist вращающего момента вычисляют из других эксплуатационных параметров силового агрегата. Полученное фактическое значение Mist вращающего момента поступает, вместе с граничным значением Mgrenz, во второй блок 55 сравнения устройства 10. Второй блок 55 сравнения проверяет, превышает ли фактическое значение Mist граничное значение Mgrenz более чем на заданное значение допуска. Если это так, то делают вывод о наличии ошибки и на выходе второго блока сравнения вырабатывается сигнал F ошибки; в противном случае сигнал F сбрасывается. В случае выдачи сигнала F ошибки в накопителе ошибок формируется соответствующая запись, и/или включается визуальная и/или звуковая индикация ошибки, и/или в качестве реакции на ошибку выполняется соответствующее мероприятие, заключающееся, например, в том, что блок управления возвращается в заданное стандартное состояние или, как крайняя мера, выполняется выключение силового агрегата. Может быть также предусмотрен счетчик ошибок, показание которого, отсчитываемое от заданного уровня, увеличивается на единицу с каждым поступлением задающего импульса на выход второго блока 55 сравнения, а ошибка фиксируется лишь в том случае, если это показание в результате продолжающегося отсчета достигает заданного порогового значения. Следовательно, реализованный подобным образом контроль вращающего момента посредством второго блока 55 сравнения выполняется не только для отрицательных значений разности Δn2 частот вращения, когда фактическое значение Mist сравнивают с максимально допустимым значением Mzul в качестве граничного значения Mgrenz, но и для положительных значений разности Δn2 частот вращения, когда фактическое значение Mist вращающего момента сравнивают со вторым значением граничного значения Mgrenz, уменьшенным относительно максимально допустимого момента Mzul.
Описанная последующая обработка сигнала F ошибки может осуществляться в устройстве 10 либо также в отдельном от него блоке управления.
Ниже рассматривается пример формирования заданного значения Msoll вращающего момента. В предпочтительном варианте осуществления изобретения в этом случае в устройстве 10 предусмотрен регулятор 5, в который, с одной стороны, поступает заданное значение nsoll частоты вращения из задатчика 20, а с другой стороны - фактическое значение nist частоты вращения от датчика 30 частоты вращения. Регулятор формирует управляющую разность Δn1=nist-nsoll в качестве первой разности значений частоты вращения. Тогда в зависимости от первой разности Δn1 значений частоты вращения регулятор 5 формирует заданное значение Msoll вращающего момента силового агрегата таким образом, что управляющая разность Δn1 становится минимальной и, тем самым, фактическое значение nist частоты вращения приводится к заданному значению nsoll. В этом случае регулятор 5 может содержать, например известным специалисту образом, интегрирующую, и/или пропорциональную, и/или дифференциальную составляющие.
Первое значение смещения offs1 может быть равно как минимум нулю. В этом случае значение допуска для превышения фактическим значением nist частоты вращения заданного значения nsoll не достигается.
Как следует из кривой 45 однопараметровой характеристики, заданное значение Msoll вращающего момента в блоке 50 выбора наименьшего значения ограничивают вторым значением, меньшим максимально допустимого значения, только в том случае, если фактическое значение nist частоты вращения превышает заданное значение nsoll более чем на первое значение смещения offs1, при этом последнее, как указывалось выше, может быть равно как минимум нулю.
Ниже приводится численный пример для линейной функции 1 с насыщением согласно уравнению (1).
Так, для максимально допустимого момента Mzul в некоторой рабочей точке силового агрегата, определяемой, согласно DE 19739564 А1, на основе положения педали акселератора и фактического значения nist частоты вращения, может быть задано, например, значение 1000 Нм. Для второго значения смещения offs2 может быть задано, например, значение 300 оборотов в минуту. Этим обеспечивается однозначное определение линейной функции 1 с насыщением согласно уравнению (1). Для определения разности значений частоты вращения Δn2 можно задать в качестве первого значения смещения offs1, например, значение 100 оборотов в минуту. Заданное значение nsoll частоты вращения может быть равно, например, 1500 оборотов в минуту. При фактическом значении nist частоты вращения, например, 1800 оборотов в минуту это дает граничное значение Mgrenz 333,3 Нм.
Ошибочный рост фактического значения Mist вращающего момента выше граничного значения Mgrenz или ошибочный рост фактического значения nisl частоты вращения выше заданного значения nsoll может быть вызван, например, ошибкой регулирования, например неправильным вводом регулировочных параметров, либо, как правило, ошибкой в процессоре или микроконтроллере устройства 10 или в блоке системы управления двигателя, служащем для получения переменных регулирования, используемых для преобразования заданного значения Msoll вращающего момента.
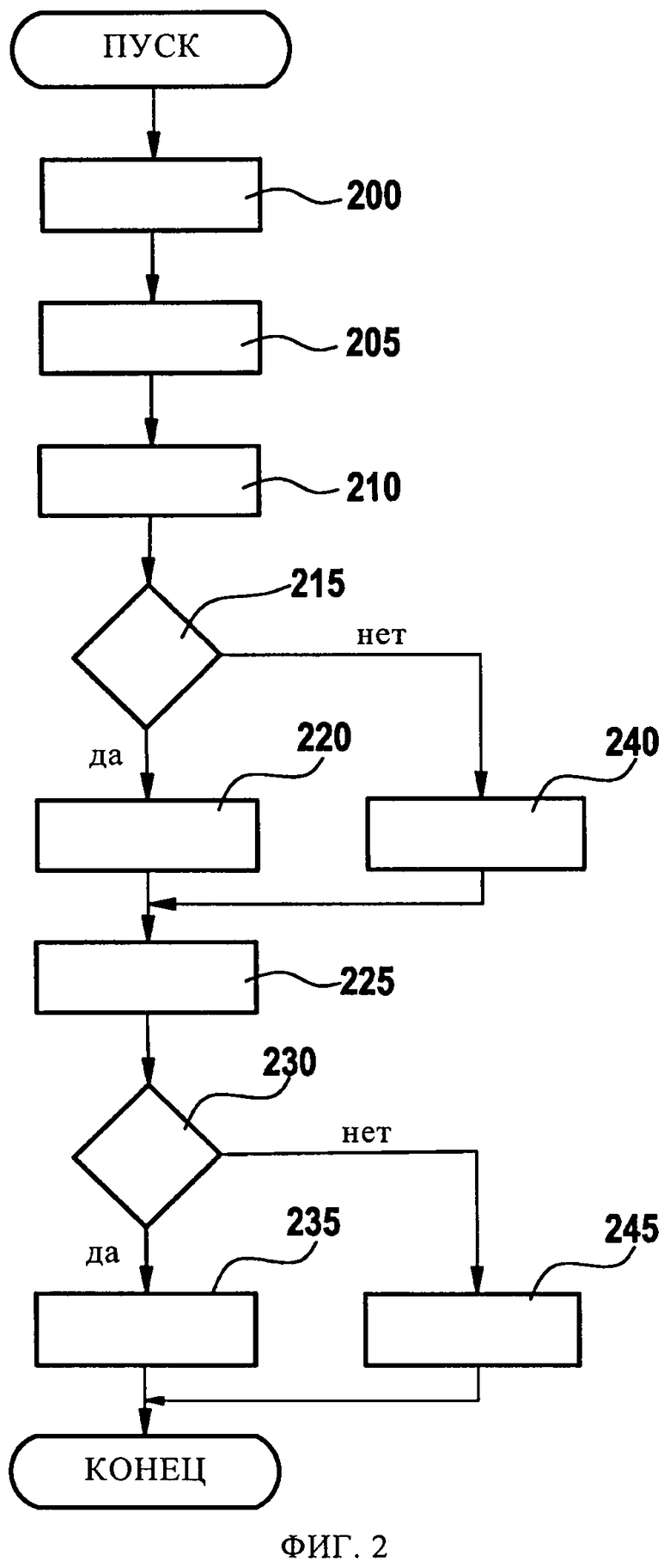
На фиг.2 представлена блок-схема программы, отображающая примерную последовательность реализации предлагаемого в изобретении способа.
После запуска программы задатчик 20 устанавливает в точке 200 программы заданное значение nsoll частоты вращения, а датчик 30 частоты вращения регистрирует фактическое значение nist частоты вращения. Кроме того, блок 40 получения данных определяет фактическое значение Mist вращающего момента. Затем осуществляется переход к точке 205 программы.
В точке 205 программы регулятор 5 устанавливает заданное значение Msoll вращающего момента в зависимости от заданного nsoll и фактического nist значений частоты вращения или, как описано выше, от выведенной из этих значений первой разности Δn1 частот вращения. Затем осуществляется переход к точке 210 программы.
В точке 210 программы сумматор 60 формирует сумму заданного значения nsoll частоты вращения и первого значения смещения offs1. Затем осуществляется переход к точке 215 программы.
В точке 215 программы первый блок 25 сравнения проверяет, превышает ли фактическое значение nist частоты вращения сумму заданного значения nsoll частоты вращения и первого значения смещения offs1. Если это так, осуществляется переход к точке 220 программы, если нет - к точке 240 программы.
В точке программы 220 блок 45 однопараметровой характеристики формирует граничное значение Mgrenz, определяемое линейной функцией 1 с насыщением согласно уравнению (1) для 0<Δn2<offs2. Кроме этого в точке программы 220 блок 45 формирует граничное значение Mgrenz=0 для Δn2≥offs2.
Максимально допустимое значение Mzul превышает нулевое значение. Для Δn2, большей или равной offs2, второе граничное значение Mgrenz равно нулю, а значит, также меньше максимально допустимого значения Mzul.
Затем осуществляется переход к точке 225 программы.
В точке 240 программы блок 45 однопараметровой характеристики формирует граничное значение Mgrenz, равное максимально допустимому значению Mzul. Затем осуществляется переход к точке 225 программы.
В точке 225 программы блок 50 выбора наименьшего значения формирует результирующее заданное значение Msollres вращающего момента как меньшее из двух значений Msoll и Mgrenz. Затем осуществляется переход к точке 230 программы.
В точке 230 программы второй блок 55 сравнения проверяет, превышает ли фактическое значение Mist вращающего момента граничное значение Mgrenz, при необходимости увеличенное на заданное значение допуска, причем последнее может быть применено, например, на испытательном стенде. Если это так, то есть фактическое значение Mist превышает сумму граничного значения Mgrenz и значения допуска, то осуществляется переход к точке 235 программы, в противном случае - к точке 245 программы.
При этом значение допуска может быть выбрано по меньшей мере равным нулю, причем в этом случае при сравнивании моментов в первом блоке 55 сравнения допуск не учитывается.
В точке 235 программы вырабатывается сигнал F ошибки. Затем происходит выход из программы. В точке 245 программы сигнал F ошибки сбрасывается. Затем происходит выход из программы.
Как уже упоминалось выше, настоящее изобретение, представленное в первом примере осуществления, может быть аналогичным образом реализовано во втором примере осуществления, где вместо заданного значения nsoll частоты вращения силового агрегата используется заданное значение vsoll скорости транспортного средства, а вместо фактического значения nist частоты вращения - фактическое значение vist скорости транспортного средства. В этом случае регулятор 5 осуществляет регулирование скорости движения в соответствии с первой разностью Δv1 между фактическим vist и заданным vsoll значениями скорости.
Для второго примера осуществления ниже поясняется, с привлечением фиг.4 и численного примера, однопараметровая характеристика с кривой зависимости граничного значения вращающего момента силового агрегата от второй разности скоростей Δv2=vist-(vsoll+voffs1). При этом значение voffs1 аналогично первому значению смещения offs1 для частоты вращения и представляет собой первое значение смещения для скорости. Кривая 46 (фиг.4), служащая для определения граничного значения Mgrenz в зависимости от второй разности скоростей Δv2, описывается следующим образом:

Здесь значение voffs2 аналогично второму значению смещения offs2 для частоты вращения и представляет собой второе значение смещения для скорости. Уравнение (2) описывает линейную функцию 2 с насыщением, показанную на фиг.4.
Принцип действия такого ограничения вращающего момента согласно фиг.4 описывается ниже с помощью численного примера.
Вплоть до первого значения смещения для скорости, например voffs1=2 км/час, сверх заданной скорости vsoll, максимально допустимое значение Mzul может использоваться в качестве регулирующей переменной для регулятора скорости движения, так как для данной скорости отсутствует какая-либо информация о нагрузке и требуются определенные резервы для регулирования с упреждением и работы регулятора без внешнего вмешательства.
Вплоть до второго значения смещения voffs2 второй разности скоростей Δv2, например voffs2=2 км/час, граничное значение Mgrenz линейно уменьшают от максимально допустимого значения при Δv2=0 до 0 Н·м при Δv2=2 км/час, и этим значением ограничивают регулятор. Это означает, что, например, при Mzul=1000 Н·м, Vsoll=60 км/час, Vist=63 км/час, voffs1=2 км/час и voffs2=2 км/час соответствующее граничное значение согласно кривой 46 однопараметровой характеристики будет равно Mgrenz=500 Н·м.
Изобретение может быть использовано в устройствах для управления работой силового агрегата, прежде всего силового агрегата транспортного средства. Способ управления работой силового агрегата предусматривает ограничение первой выходной переменной (Msoll) силового агрегата. Задают заданное значение для второй выходной переменной силового агрегата, предпочтительно частоты вращения или скорости. Определяют фактическое значение второй выходной переменной силового агрегата. Сравнивают заданное значение с фактическим значением. В случае, когда превышения заданного значения фактическим значением не установлено, первую выходную переменную (Msoll) ограничивают первым значением (Mzul). В случае, когда установлено превышение заданного значения фактическим значением, эту выходную переменную (Msoll) ограничивают вторым значением, меньшим, чем первое (Mzul). Раскрыто устройство для управления работой силового агрегата. Технический результат заключается в предотвращении аварийного выключения силового агрегата при превышении заданного значения частоты вращения или скорости. 2 н. и 8 з.п. ф-лы, 4 ил.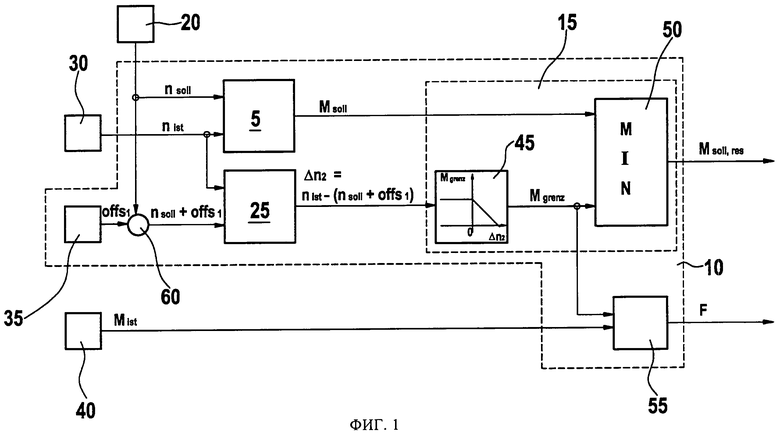
1. Способ управления работой силового агрегата, прежде всего силового агрегата транспортного средства, предусматривающий ограничение первой выходной переменной (Msoll) силового агрегата, отличающийся тем, что задают заданное значение для второй выходной переменной силового агрегата, предпочтительно частоты вращения (nsoll) или скорости (vsoll), определяют фактическое значение этой второй выходной переменной силового агрегата, сравнивают заданное значение с фактическим значением, в случае, когда превышения заданного значения фактическим значением не установлено, ограничивают первую выходную переменную (Msoll) первым значением (Mzul), а в случае, когда установлено превышение заданного значения фактическим значением, эту выходную переменную (Msoll) ограничивают вторым значением, меньшим, чем первое (Mzul).
2. Способ по п.1, отличающийся тем, что в качестве первого значения (Mzul) выбирают максимально допустимое значение.
3. Способ по п.1, отличающийся тем, что выходную переменную (Msoll) ограничивают вторым значением только в том случае, если фактическое значение второй выходной переменной превышает ее заданное значение более чем на заданное значение смещения (offs1).
4. Способ по п.1, отличающийся тем, что с увеличением превышения заданного значения фактическим значением второе значение выбирают меньшим.
5. Способ по п.4, отличающийся тем, что с увеличением превышения заданного значения фактическим значением второе значение уменьшают согласно линейной функции с насыщением (1).
6. Способ по п.1, отличающийся тем, что для ограничения первой выходной переменной ограничивают ее заданное значение (Msoll).
7. Способ по одному из пп.1-5, отличающийся тем, что в зависимости от результата сравнения заданного и фактического значений второй выходной переменной посредством регулятора (5) задают заданное значение первой выходной переменной (Msoll), чтобы привести фактическое значение второй выходной переменной к ее заданному значению, а для ограничения первой выходной переменной ограничивают ее заданное значение (Msoll).
8. Способ по п.1, отличающийся тем, что в случае, когда установлено превышение заданного значения второй выходной переменной ее фактическим значением, проверяют, превышает ли фактическое значение (Mist) первой выходной переменной второе значение, и в этом случае делают вывод о наличии ошибки и в качестве реакции на ошибку начинают выполнение соответствующего мероприятия.
9. Способ по п.1, отличающийся тем, что в качестве первой выходной переменной выбирают вращающий момент, прежде всего индикаторный вращающий момент, или мощность силового агрегата.
10. Устройство (10) для управления работой силового агрегата, прежде всего силового агрегата транспортного средства, содержащее средства (15) ограничения для ограничения первой выходной переменной (Msoll) силового агрегата, отличающееся тем, что предусмотрены средства (25) сравнения для сравнения заданного значения второй выходной переменной силового агрегата, предпочтительно частоты вращения или скорости, с определенным фактическим значением этой второй выходной переменной, причем в случае, когда средствами (25) сравнения не установлено превышения заданного значения фактическим значением, средства (15) ограничения ограничивают первую выходную переменную (Msoll) первым значением (Mzul), а в случае, когда средствами (25) сравнения установлено превышение заданного значения фактическим значением, средства (15) ограничения ограничивают эту выходную переменную (Msoll) вторым значением, меньшим, чем первое (Mzul).
| JP 2004245191 A, 02.09.2004 | |||
| DE 102004058231 A1, 21.07.2005 | |||
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОВЫМ АГРЕГАТОМ ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2212555C2 |
| DE 19926351 A1, 21.07.2005 | |||
| Способ фазового анализа висмута | 1982 |
|
SU1045122A1 |
| СПОСОБ УПРАВЛЕНИЯ СИЛОВЫМ АГРЕГАТОМ (ВАРИАНТЫ) | 2001 |
|
RU2267632C2 |
| Способ и устройство для управления работой и для контроля за работой двигателя внутреннего сгорания | 1999 |
|
RU2220307C2 |

