Перекрестные ссылки на родственные заявки
Данная заявка притязает на преимущество Предварительной патентной заявки США №60/917782, зарегистрированной 14 мая 2007 г., и содержит в себе раскрытие заявки путем отсылки.
Уровень техники
Системы обнаружения целей могут захватывать цель различными способами, включая РЛ сигнатуру, тепловую сигнатуру и инфракрасную сигнатуру. Процесс захвата цели может начинаться либо вручную, либо автоматически в зависимости от применения и условий окружающей обстановки. Системы обнаружения целей, которые работают в ограниченных пространствах или с окружающими условиями, требующими времени обнаружения менее одной секунды, могут не различать важную цель и ложную цель в рамках необходимого интервала для успешного поражения цели без возможной стрельбы по безопасной цели.
Сущность изобретения
Способы и устройство для выбора цели из радиолокационных данных в соответствии с различными особенностями настоящего изобретения работают в сочетании с источником данных в реальном масштабе времени и системой радиоэлектронного подавления. Источник данных в реальном масштабе времени предоставляет данные слежения по меньшей мере для одной возможной цели, из которых может выбираться ведущий маршрут, ассоциированный с одной целью, удовлетворяющий заранее установленному пороговому условию, для поражения системой радиоэлектронного подавления.
Краткое описание чертежей
Более полное понимание настоящего изобретения может быть получено путем обращения к подробному описанию и формуле изобретения, при рассмотрении применительно к нижеследующим пояснительным фигурам. На нижеследующих фигурах одинаковые номера ссылок ссылаются на аналогичные элементы и этапы по всем фигурам.
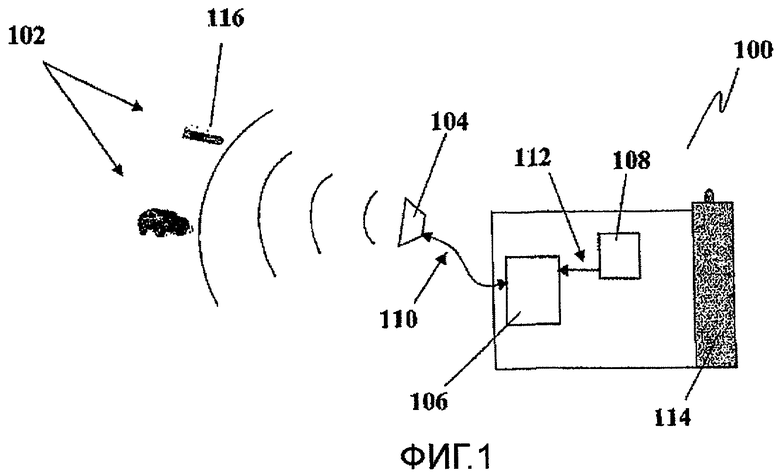
Фиг.1 показательно иллюстрирует систему радиоэлектронного подавления в соответствии с типовым вариантом осуществления настоящего изобретения; и
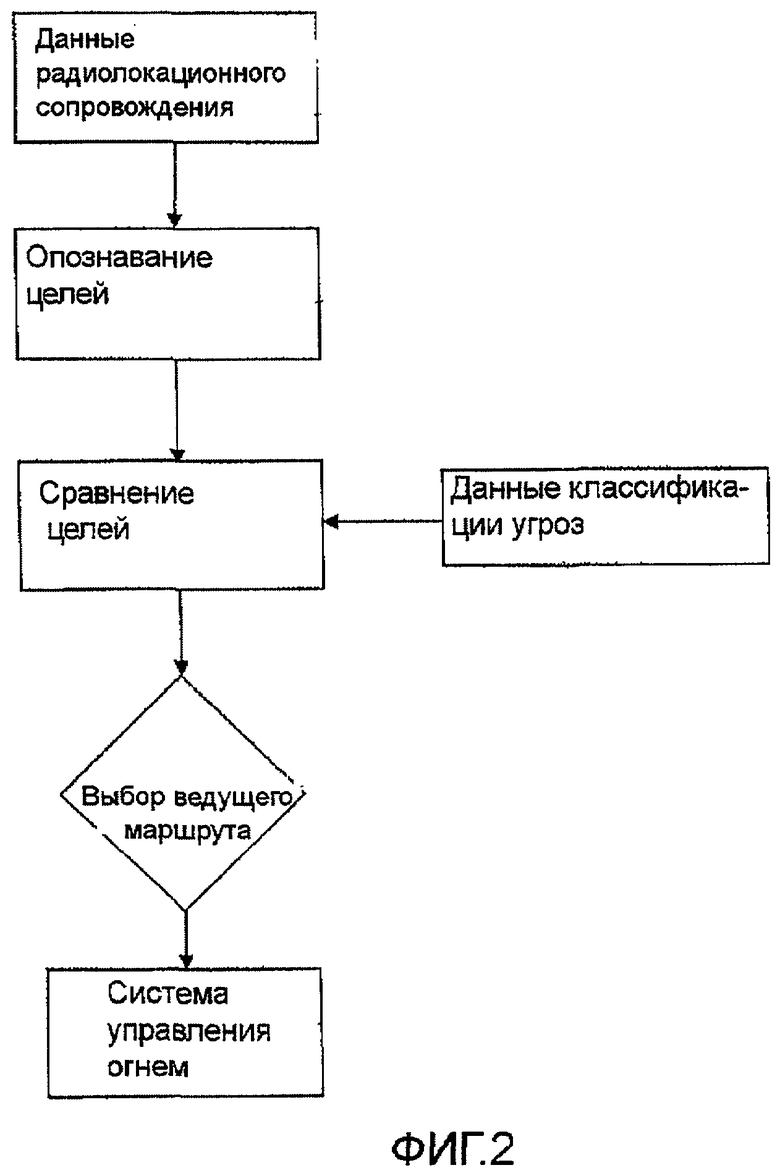
Фиг.2 - блок-схема процесса выбора для цели.
Элементы и этапы на фигурах иллюстрируются для простоты и ясности и не обязательно представлены в соответствии с какой-либо конкретной последовательностью. Например, этапы, которые могут выполняться одновременно или в разном порядке, иллюстрируются на фиг. для помощи в улучшении понимания вариантов осуществления настоящего изобретения.
Подробное описание вариантов осуществления изобретения
Настоящее изобретение может описываться на примере функциональных компонентов и различных этапов обработки. Такие функциональные блоки могут быть реализованы любым количеством аппаратных или программных компонентов, сконфигурированных для выполнения заданных функций и достижения различных результатов. Например, настоящее изобретение может применять различные компьютеры, сети, серверы, базы данных и т.п., которые могут осуществлять ряд функций. К тому же настоящее изобретение может быть применено на практике в сочетании с любым количеством сетей, носителей информации или источников данных в реальном масштабе времени, и описанные системы являются лишь типовыми применениями для изобретения. Более того, настоящее изобретение может применять любое количество традиционных методик для передачи данных, вычисления информации, представления информации, хранения информации и т.п.
Обращаясь к фиг.1, способы и устройства для выбора цели в соответствии с различными особенностями настоящего изобретения работают в сочетании с системой 100 радиоэлектронного подавления, подключенной к источнику 104 данных в реальном масштабе времени, например радиолокационной системе. Система 100 радиоэлектронного подавления может быть сконфигурирована для реагирования и поражения определенной угрозы из числа различных других определенных возможных целей 102 в заданной области. Например, система 106 распознавания угроз, в соответствии с различными особенностями настоящего изобретения, работает в сочетании с источником 104 данных в реальном масштабе времени, который может быть сконфигурирован для предоставления данных 110 слежения в реальном масштабе времени для группы возможных целей 102. Система 108 классификации угроз может предоставлять технические данные 112 угроз системе 106 распознавания угроз, которая объединяет эту информацию с данными 110 слежения в реальном масштабе времени, чтобы выбрать ведущий маршрут 116 для поражения. Ведущий маршрут 116 и связанные данные слежения затем могут отправляться системе 114 управления огнем, которая выборочно поражает цель с помощью радиопротиводействия.
Возможные цели 102 содержат по меньшей мере один объект в заданной области или пространстве. Возможные цели 102 могут содержать, например, различные объекты в движении, например транспортные средства, самолет, птицы и выпущенные снаряды. Возможные цели 102 могут быть управляемыми или неуправляемыми и могут содержать любой подходящий материал, например свинец, сталь или взрывчатые элементы. Возможные цели 102 также могут перемещаться любым способом, например по траектории, по линейному маршруту цели или по нестандартной неотмеченной траектории.
Ведущий маршрут 116 является одиночной целью, выбранной для поражения системой 100 радиоэлектронного подавления. Ведущий маршрут 116 может находиться среди возможных целей 102, прослеженных источником 110 данных в реальном масштабе времени. В типовом варианте осуществления ведущий маршрут 102 содержит противотанковую гранату ("RPG").
Источник 104 данных в реальном масштабе времени формирует данные 110 слежения в реальном масштабе времени, относящиеся к движению возможных целей 102. Источник 104 данных в реальном масштабе времени может содержать любую систему для сбора данных в реальном масштабе времени, например радиолокационную систему, инфракрасную систему слежения, лазерную систему слежения или похожую. Источник 104 данных в реальном масштабе времени может содержать любой простой или сложный способ сбора данных 110 слежения в реальном масштабе времени. Например, в одном варианте осуществления источник 104 данных в реальном масштабе времени может содержать радиолокационную систему, интегрированную в систему 100 радиоэлектронного подавления, которая конфигурируется для создания независимых данных о маршруте для каждой из возможных целей 102.
Данные 110 слежения в реальном масштабе времени относятся к параметрам скорость и направленному движению возможных целей 102. Данные 110 слежения в реальном масштабе времени могут содержать любую информацию, допускающую определение движения возможных целей, например траекторию движения, скорость, ускорение и предполагаемое положение в заданный момент времени в будущем. Данные слежения в реальном масштабе времени дополнительно могут быть разделены на составляющие векторов или другие подходящие формы данных, содержащие часть или всё глобальное значение, например скорость. Данные 110 слежения в реальном масштабе времени могут конфигурироваться любым подходящим способом и могут содержать необработанные данные радиолокационных изображений или данные, которые подвергнуты этапам предварительной обработки, например распознаванию изображения или отдельного маршрута. Данные 110 слежения в реальном масштабе времени могут содержать либо аналоговые, либо цифровые данные.
Данные 110 слежения в реальном масштабе времени могут формироваться с помощью любого подходящего способа или процесса. Например, в области приблизительно половины квадратного километра данные в реальном масштабе времени могут формироваться с помощью различных движущихся объектов, например транспортных средств, самолета, птиц и выпущенных снарядов. В одном варианте осуществления RPG может быть выпущена из постоянного размещения по направлению к системе 100 радиоэлектронного подавления, и источник 104 данных в реальном масштабе времени формирует данные 110 слежения в реальном масштабе времени, когда RPG перемещается из пункта запуска к системе 100 радиоэлектронного подавления. Данные 110 слежения в реальном масштабе времени, предоставленные источником 104 данных в реальном масштабе времени, могут содержать информацию, например, о том, когда была выпущена RPG, о скорости и ускорении всех возможных целей 102, направленных составляющих всех возможных целей 102 относительно источника 104 данных в реальном масштабе времени, количестве времени, которое прошло с момента, когда была выпущена RPG, и оценки момента попадания или возможные точки перехвата.
Система 106 распознавания выбирает ведущий маршрут 116 для поражения из группы возможных целей 102. Система 106 распознавания может содержать любую подходящую систему для анализа данных 110 слежения в реальном масштабе времени и определения возможной угрозы. Например, система 106 распознавания может содержать традиционный компьютер и/или плату с интегральной схемой, допускающие анализ данных 110 слежения в реальном масштабе времени, ассоциированных с каждой из возможных целей 102. Система 106 распознавания может содержать, например, специализированный процессор и модуль запоминающего устройства, либо система 106 распознавания может интегрироваться в существующие системы или компьютеры, например компьютер системы слежения или источник 104 данных в реальном масштабе времени. Система 106 распознавания дополнительно может быть реализована полностью или частично посредством программного обеспечения, хранимого в запоминающем устройстве и выполняемого процессором, и/или может быть реализована полностью или частично посредством аппаратных средств.
Ссылаясь теперь на фиг.2, в одном варианте осуществления система 106 распознавания может быть сконфигурирована для обработки данных 110 слежения в реальном масштабе времени и определения каждой возможной цели 102. Возможные цели 102 могут определяться по любым подходящим критериям, например близость, относительная направленная скорость, размер, форма, инфракрасная сигнатура, или они могут включать в себя все объекты, наблюдаемые источником 104 данных в реальном масштабе времени. Как только система 106 распознавания определила возможные цели 102, ассоциированные данные 110 слежения в реальном масштабе времени для каждой независимой возможной цели 102 могут анализироваться и сравниваться со всеми другими возможными целями 102.
Каждая возможная цель 102 также может оцениваться на основе возможности системы 100 радиоэлектронного подавления успешно перехватить возможную цель 102 в некоторой точке между текущим положением возможной цели 102 и системой 100 радиоэлектронного подавления. Например, если одна из возможных целей 102 перемещается в направлении от системы 100 радиоэлектронного подавления, то система 106 распознавания может исключить этот объект из рассмотрения для перехвата. Наоборот, если одна из возможных целей 102 предполагается вдоль маршрута, наведенного на или рядом с системой 100 радиоэлектронного подавления, система 106 распознавания может сравнить предполагаемый маршрут с заранее установленными возможностями радиопротиводействия. Если определяется, что система 100 радиоэлектронного подавления способна перехватить возможную цель 102, то эта возможная цель 102 может быть подвергнута дополнительному анализу или сравнению с известными угрозами.
Возможные цели 102 в промежутке для возможности перехвата могут дополнительно сравниваться с системой 108 характеристик угроз. Система 108 характеристик угроз предоставляет профильную информацию для известных классов угроз. Система 108 характеристик угроз может содержать любую подходящую систему для снабжения системы 106 распознавания характеристиками угроз. Например, система 108 характеристик угроз может содержать параметрические данные об известных угрозах, сохраненные в виде таблицы, массива, матрицы или в каком-нибудь другом виде на записываемом носителе. Эти данные затем могут передаваться системе 106 распознавания любым подходящим способом, например по высокоскоростному информационному соединению, беспроводному информационному соединению или через интегральную схему.
В одном варианте осуществления система 108 характеристик угроз может содержать информацию о составляющей скорости для RPG. Эта информация может включать в себя данные, например диапазоны минимальной и максимальной скорости для известных RPG и лётные характеристики RPG. В другом варианте осуществления система 108 характеристик угроз может содержать пороговые значения, устанавливающие скорости, ниже которых система 100 радиоэлектронного подавления может быть нереагирующей. Например, система 106 распознавания может игнорировать возможные цели 102 с составляющими скорости в диапазоне известных скоростей полета птиц. В еще одном варианте осуществления, если возможная цель 102 обнаружена имеющей скорость в известных параметрических границах, ассоциированных с RPG, то возможная цель 102 может быть определена как ведущий маршрут 116 и выбрана для поражения, за исключением оставшихся возможных целей 102. Система 106 распознавания затем может перенаправить данные 110 слежения в реальном масштабе времени для ведущего маршрута 116 системе 114 управления огнем.
Система 114 управления огнем отслеживает ведущий маршрут 116 и выдает команду запуска, когда ведущий маршрут 116 находится в периоде пуска в радиопротиводействии. Система 114 управления огнем может содержать любую систему или сочетание систем для управления запуском радиопротиводействия. Система 114 управления огнем может быть объединена с источником 104 данных в реальном масштабе времени, системой 100 радиоэлектронного подавления, либо она может быть сконфигурирована в виде автономной системы.
В предшествующем описании изобретение описано со ссылкой на конкретные типовые варианты осуществления. Различные модификации и изменения могут быть сделаны без отклонения от объема настоящего изобретения, который изложен в формуле изобретения. Описание и фиг. являются пояснительными, а не ограничивающими, и модификации предназначены для включения в объем настоящего изобретения. Соответственно, объем изобретения должен определяться формулой изобретения и ее юридическими эквивалентами, а не только описанными примерами.
Например, этапы, перечисленные в любых пунктах формулы на способ или процесс, могут выполняться в любом подходящем порядке и не ограничиваются конкретным порядком, представленным в формуле изобретения. Более того, компоненты и/или элементы, перечисленные в любых пунктах формулы на устройство, могут быть собраны или иным образом функционально сконфигурированы в различных перестановках и соответственно не ограничиваются конкретной конфигурацией, перечисленной в описании и показанной на чертежах.
Выгоды, преимущества и решения проблем описаны выше в отношении конкретных вариантов осуществления. Любая выгода, преимущество, решение проблемы или любой элемент, который может послужить причиной для выгоды, преимущества или решения, которые должны произойти или стать более четкими, не должны истолковываться как важные, необходимые или существенные признаки или компоненты любого или всех пунктов формулы.
При использовании в этом описании термины "содержат", "содержит", "содержащий", "имеющий", "включающий", "включает в себя" или любые их вариации предназначены для ссылки на неисключительное включение, так что процесс, способ, изделие, состав или устройство, которое содержит список элементов, не включает в себя только те перечисленные элементы, но также может включать в себя другие элементы, неявно перечисленные или присущие такому процессу, способу, изделию, составу или устройству. Другие сочетания и/или модификации вышеописанных структур, расположений, применений, пропорций, элементов, материалов или компонентов, используемых при применении на практике настоящего изобретения, в дополнение к не перечисленным конкретно, могут меняться или иным образом отдельно приспосабливаться к конкретным окружающим условиям, технологическим условиям, параметрам исполнения или другим требованиям к функционированию без отклонения от общих принципов изобретения.
Способы и устройство для выбора цели из радиолокационных данных в соответствии с различными особенностями настоящего изобретения работают в сочетании с источником данных в реальном масштабе времени и системой радиоэлектронного подавления. Источник данных в реальном масштабе времени предоставляет данные слежения, по меньшей мере, для одной возможной цели, из которых может выбираться ведущий маршрут, ассоциированный с одной целью, удовлетворяющий заранее установленному пороговому условию, для поражения системой радиоэлектронного подавления. Достигаемый технический результат изобретения - повышение точности выбора цели из данных радиолокационного сопровождения. 3 н. и 6 з.п. ф-лы, 2 ил.
1. Реализуемый компьютером способ для выбора цели из данных слежения в реальном масштабе времени, содержащий этапы, на которых:
принимают данные слежения в реальном масштабе времени, по меньшей мере, для одной возможной цели из источника данных в реальном времени;
сравнивают данные слежения в реальном времени для каждой из, по меньшей мере, одной возможной цели с данными слежения в реальном времени для любых дополнительных возможных целей из, по меньшей мере, одной возможной цели;
оценивают данные слежения в реальном времени для каждой из, по меньшей мере, одной возможной цели по отношению к заранее установленным возможностям радиопротиводействия;
определяют возможность радиопротиводействия для успешного перехвата каждой из, по меньшей мере, одной возможной цели;
исключают из возможного выбора в качестве ведущего маршрута любую из, по меньшей мере, одной возможной цели, которая не может быть успешно перехвачена радиопротиводействием; и
выбирают ведущий маршрут, по меньшей мере, из одного возможного, причем ведущий маршрут содержит перехватываемые угрозы, которые находятся в пределах заранее установленного порогового значения, соответствующего набору параметрических границ для известной угрозы.
2. Реализуемый компьютером способ выбора цели по п.1, в котором этап, на котором сравнивают данные слежения в реальном времени, содержит этапы, на которых:
распознают относительные скорости и направления каждой из, по меньшей мере, одной возможной цели;
анализируют относительные скорости и направления каждой из, по меньшей мере, одной возможной цели за период времени; и определяют каждую из, по меньшей мере, одной возможной цели как допускающую перехват.
3. Реализуемый компьютером способ выбора цели по п.1, в котором ведущий маршрут определяется путем сравнения данных слежения в реальном времени с известным набором свойств для заранее установленной угрозы.
4. Компьютерная система для выбора цели из данных слежения в реальном времени, причем компьютерная система сконфигурирована для:
приема данных слежения в реальном времени из источника данных в реальном времени, по меньшей мере, для одной возможной цели;
сравнения данных слежения в реальном времени для каждой, из по меньшей мере, одной возможной цели с данными слежения в реальном времени для любых дополнительных возможных целей из, по меньшей мере, одной возможной цели;
оценки данных слежения в реальном времени для каждой из, по меньшей мере, одной возможной цели по отношению к заранее установленным возможностям радиопротиводействия;
определения возможности радиопротиводействия для успешного перехвата каждой из, по меньшей мере, одной возможной цели;
исключения из возможного выбора в качестве ведущего маршрута любой из, по меньшей мере, одной возможной цели, которая не может быть успешно перехвачена с помощью радиопротиводействия; и
выбора ведущего маршрута, по меньшей мере, из одной возможной цели, причем ведущий маршрут содержит перехватываемые угрозы, которые находятся в пределах заранее установленного порогового значения, соответствующего набору параметрических границ для известной угрозы.
5. Компьютерная система для выбора цели по п.4, в которой сравнение данных слежения в реальном времени содержит:
распознавание относительных скоростей и направлений каждой из, по меньшей мере, одной возможной цели;
анализ относительных скоростей и направлений каждой из, по меньшей мере, одной возможной цели за период времени и
определение каждой из, по меньшей мере, одной возможной цели как допускающей перехват.
6. Компьютерная система для выбора цели по п.4, в которой ведущий маршрут определяется путем сравнения данных слежения в реальном времени с известным набором свойств для заранее установленной угрозы.
7. Машиночитаемый носитель, хранящий команды, выполняемые компьютером, причем команды заставляют компьютер выполнять процесс для выбора цели из данных слежения в реальном времени, содержащий:
прием данных слежения в реальном времени из источника данных в реальном времени, по меньшей мере, для одной возможной цели;
сравнение данных слежения в реальном времени для каждой из, по меньшей мере, одной возможной цели с данными слежения в реальном времени для любых дополнительных возможных целей из, по меньшей мере, одной возможной цели;
оценку данных слежения в реальном времени для каждой из, по меньшей мере, одной возможной цели по отношению к заранее установленным возможностям радиопротиводействия;
определение возможности радиопротиводействия для успешного перехвата каждой из, по меньшей мере, одной возможной цели;
исключение из возможного выбора в качестве ведущего маршрута любой из, по меньшей мере, одной возможной цели, которая не может быть успешно перехвачена с помощью радиопротиводействия; и
выбор ведущего маршрута, по меньшей мере, из одной возможной цели, причем ведущий маршрут содержит перехватываемые угрозы, которые находятся в пределах заранее установленного порогового значения, соответствующего набору параметрических границ для известной угрозы.
8. Носитель по п.7, в котором сравнение параметров скорости содержит:
распознавание относительных скоростей и направлений каждой из, по меньшей мере, возможных угроз;
анализ относительных скоростей и направлений каждой из, по меньшей мере, двух возможных угроз за период времени и
определение каждой угрозы как допускающей перехват.
9. Носитель по п.7, в котором ведущий маршрут определяется путем сравнения данных слежения в реальном времени с известным набором свойств для заранее установленной угрозы.
| US 20030228032 A1, 11.12.2003 | |||
| US 7104496 B2, 12.09.2006 | |||
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ В РЕЖИМЕ ОБЗОРА | 2001 |
|
RU2207589C2 |
| Электролизер с биполярными электродами | 1934 |
|
SU42302A1 |
| УЛЬТРАЗВУКОВАЯ ЗУБОРЕЗНАЯ ГОЛОВКА | 2020 |
|
RU2734368C1 |

