ОБЛАСТЬ ТЕХНИКИ
[1] Настоящее изобретение относится к области систем, способов и устройств управления полетом; в частности, к системе, способу и устройству для обнаружения и автоматического перемещения вокруг неподвижных и/или движущихся препятствий.
УРОВЕНЬ ТЕХНИКИ
[2] Авиационные технологии, в том числе технологии беспилотных летательных аппаратов (БПЛА), являются ценным инструментом для решения задач, включающих сбор информации, наблюдение и разведку, и доставку полезной нагрузки. В процессе эксплуатации летательные аппараты в своем воздушном пространстве могут сталкиваться как с крупными, так и с небольшими препятствиями, которые могут быть неподвижными или перемещающимися и положение которых заранее неизвестно. Традиционные формы обнаружения и уклонения от препятствий в летательном аппарате опираются на то, что пилот выполняет свою важную обязанность и смотрит за тем, что происходит снаружи летательного аппарата для того, чтобы убедиться, что летательный аппарат не находится на курсе, ведущем к столкновению с препятствием, таким как другой летательный аппарат. Существующие технологии предотвращения столкновений летательных аппаратов с препятствиями, в том числе Система глобального позиционирования ("GPS"), как правило, не отвечают существующим требованиям, поскольку многие препятствия не могут быть распознаны (или быстро распознаны) посредством устройства GPS и характеристики точности GPS широко варьируются в разных средах в зависимости от высоты или местности.
[3] Для предупреждения столкновений в коммерческой авиации в качестве стандарта была принята Система предупреждения столкновения самолетов в воздухе (Traffic Collision Avoidance System, TCAS), которая позволяет определять положение и уклоняться друг от друга отвечающим на запросы летательным аппаратам. Как может быть очевидным, отвечающий на запросы летательный аппарат относится к летательному аппарату, способному к сотрудничеству с отвечающим на запросы датчиком. Например, отвечающий на запросы летательный аппарат может быть оснащен системой TCAS (TCAS II или более ранней версией), такой как транспондер в режиме S или режиме С, полуавтоматическая система наблюдения за воздушной обстановкой (ADS-B) или, в качестве альтернативы, с использованием других излучений и сообщений сквиттера, таких как ADS-B. Хотя система TCAS предлагает решение проблемы обнаружения и уклонения от препятствий для БПЛА, система TCAS может выполнить эту задачу только в том случае, если каждый БПЛА и каждое препятствие содержит транспондер. Другими словами, отвечающие на запросы цели выдают свое местоположение и курс (например, местоположение по GPS и вектор скорости) другим летательным аппаратам посредством радио (например, с использованием ADS-B или других способов), а не отвечающие на запросы препятствия не выдают другим информацию о местоположении и курсе (летательные аппараты с несколькими несущими винтами, летательные аппараты общего назначения, птицы и т.д.). Кроме того, существующие системы управления полетом, разработанные для обнаружения и уклонения от не отвечающих на запросы препятствий, используют дорогостоящие радиолокационные антенные решетки для отслеживания препятствий и обычно используются только на крупных летательных аппаратах.
[4] Таким образом, существует потребность в системе для обнаружения и уклонения от не отвечающих на запросы БПЛА, летательных аппаратов и препятствий, которая при этом должна быть доступной для использования как на крупных, так и на небольших летательных аппаратах и по разумной цене. Кроме того, существует потребность в системе с открытой архитектурой, которая позволяет быстро вводить новые возможности, повышает безопасность и расширяет функциональность - без больших затрат или необходимости в повторной сертификации. Система обнаружения и уклонения от не отвечающих на запросы препятствий, находящихся на курсе, ведущем к столкновению, на летательном аппарате, такая как раскрыта в настоящем документе, удовлетворяет эти потребности и позволяет быстро вводить новые возможности с минимальными затратами или нагрузкой на сертификацию.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[5] Изобретение относится к системам, способам и устройствам управления полетом; в частности, к системе, способу и методу обнаружения и автоматического перемещения вокруг неподвижных и/или движущихся препятствий; еще более конкретно, к способам и методам для датчиков и транспортных средств для обнаружения и автоматического перемещения вокруг препятствий. Как будет раскрыто, автоматизированная система обнаружения и уклонения обнаруживает не отвечающие на запросы препятствия и уклоняется от них с обеспечением значительной выгоды для различных операторов при решении различных задач. Посредством иллюстраций и без ограничения, автоматизированная система обнаружения и уклонения может быть использована на небольших автономных летательных аппаратах, для которых соответствие правилам Предупреждения столкновения самолетов в воздухе нецелесообразно с экономической точкой зрения, не является возможным или необходимым, или в качестве альтернативы радиолокационным антенным решеткам, обеспечивающим связь "воздух - воздух" на крупных летательных аппаратах, для обнаружения и уклонения от не отвечающих на запросы препятствий, которые в противном случае останутся необнаруженными.
[6] Согласно первому аспекту система обнаружения препятствий для использования в летательном аппарате содержит:
полезную нагрузку в виде датчика для обнаружения не отвечающего на запросы препятствия в первом воздушном пространстве, находящемся возле летательного аппарата, при этом полезная нагрузка в виде датчика содержит радиолокационную станцию для радиального сканирования первого воздушного пространства с выработкой радиолокационной информации, имеющей первое разрешение и камеру для получения изображения второго воздушного пространства в указанном первом воздушном пространстве с выработкой оптической информации со вторым разрешением, которое выше, чем первое разрешение; и
процессор, функционально соединенный с полезной нагрузкой в виде датчика, причем процессор выполнен с возможностью определения местоположения не отвечающего на запросы препятствия и для определения не отвечающего на запросы препятствия в виде функции радиолокационной информации и оптической информации.
[7] В некоторых аспектах камера выполнена с возможностью панорамирования и наклона.
[8] В некоторых аспектах камера включает в себя датчик длинноволнового инфракрасного излучения.
[9] В некоторых аспектах камера включает в себя электрооптический датчик, работающий в видимой и ближней инфракрасной области спектра.
[10] В некоторых аспектах оптическая информация включает в себя по меньшей мере одно из теплового сечения и оптического сечения.
[11] В некоторых аспектах радиолокационная информация содержит радиолокационное сечение.
[12] В некоторых аспектах процессор выполнен с возможностью деления цифрового представления первого воздушного пространства на множество радиальных секторов.
[13] В некоторых аспектах второе воздушное пространство расположено в пределах одного из указанного множества радиальных секторов.
[14] В некоторых аспектах радиолокационная информация включает в себя двумерное местоположение не отвечающего на запросы препятствия в первом воздушном пространстве, а оптическая информация включает в себя азимутальное положение не отвечающего на запросы препятствия во втором воздушном пространстве.
[15] В некоторых аспектах радиолокационная станция представляет собой механически вращающуюся корабельную радиолокационную станцию.
[16] В некоторых аспектах радиолокационная информация включает в себя двумерную карту радиального представления для первого воздушного пространства.
[17] В некоторых аспектах двумерная карта радиального представления разделена на множество радиальных секторов.
[18] В некоторых аспектах процессор выполнен с возможностью определения радиального сектора, связанного с не отвечающим на запросы препятствием, из указанного множества радиальных секторов, связанного с не отвечающим на запросы препятствием, и выдачи инструкции на сканирование указанного радиального сектора.
[19] В некоторых аспектах процессор выполнен с возможностью выработки прогнозируемой траектории полета для не отвечающего на запросы препятствия на основании, по меньшей мере частично, радиолокационной информации и оптической информации.
[20] В некоторых аспектах процессор выполнен с возможностью выработки маршрута полета, обеспечивающего уклонение от препятствий, для предупреждения столкновения с не отвечающими на запросы препятствиями на основании, по меньшей мере частично, прогнозируемой траектории полета.
[21] В некоторых аспектах процессор выполнен с возможностью выработки одной или более команд для приведения в действие одного или более полетных контроллеров для следования по маршруту полета, обеспечивающему уклонение от препятствий.
[22] В некоторых аспектах летательный аппарат также содержит человеко-машинный интерфейс, функционально соединенный с процессором для обеспечения средств взаимодействия между пилотом и летательным аппаратом.
[23] В некоторых аспектах человеко-машинный интерфейс выполнен для обеспечения возможности пилоту управлять процессором или сообщаться с ним.
[24] В некоторых аспектах человеко-машинный интерфейс выполнен с возможностью отображения одного или более параметров полезной нагрузки, выполненной в виде датчика.
[25] В некоторых аспектах человеко-машинный интерфейс включает в себя сенсорный экран.
[26] В некоторых аспектах человеко-машинный интерфейс выполнен с возможностью передачи команды между процессором и пилотом посредством голосовой системы.
[27] В некоторых аспектах первое воздушное пространство обеспечивает поле обзора величиной 360 градусов вокруг летательного аппарата.
[28] В некоторых аспектах поле обзора величиной 360 градусов остается в плоскости, которая параллельна линии полета, задаваемой летательным аппаратом.
[29] Согласно второму аспекту способ обнаружения и уклонения от не отвечающего на запросы препятствия во время эксплуатации летательного аппарата включает:
сканирование первого воздушного пространства с использованием радиолокационной системы для выработки радиолокационной информации, имеющей первое разрешение;
получение изображения второго воздушного пространства с использованием камеры для выработки оптической информации со вторым разрешением, которое выше, чем первое разрешение, причем второе воздушное пространство находится в указанном первом воздушном пространстве;
отслеживание не отвечающего на запросы препятствия на основании по меньшей мере частично радиолокационной информации и оптической информации;
выработку прогнозируемой траектории полета на основании по меньшей мере частично радиолокационной информации и оптической информации;
выработку маршрута полета, обеспечивающего уклонение от препятствий, для уклонения от не отвечающего на запросы препятствия и
сообщение маршрута полета, обеспечивающего уклонение от препятствий, в систему управления полетом летательного аппарата.
[30] В некоторых аспектах летательный аппарат выполнен с возможностью автономного выполнения выработанного маршрута полета, обеспечивающего уклонение от препятствий.
[31] В некоторых аспектах камера выполнена с возможностью панорамирования и наклона.
[32] В некоторых аспектах камера включает в себя датчик длинноволнового инфракрасного излучения.
[33] В некоторых аспектах способ также включает этап деления первого воздушного пространства на множество радиальных секторов с использованием процессора.
[34] В некоторых аспектах второе воздушное пространство является одним из указанного множества радиальных секторов.
[35] В некоторых аспектах способ также включает этап определения азимутального положения не отвечающего на запросы препятствия во втором воздушном пространстве с использованием камеры.
[36] В некоторых аспектах радиолокационная станция представляет собой механически вращающуюся корабельную радиолокационную станцию.
[37] В некоторых аспектах радиолокационная информация включает в себя двумерную карту радиального представления для первого воздушного пространства.
[38] В некоторых аспектах двумерная карта радиального представления разделена на множество радиальных секторов.
[39] В некоторых аспектах способ также включает этап определения посредством процессора радиального сектора, связанного с не отвечающим на запросы препятствием, из указанного множества радиальных секторов, связанного с не отвечающим на запросы препятствием.
[40] В некоторых аспектах способ также включает этап выработки посредством процессора прогнозируемой траектории полета для не отвечающего на запросы препятствия на основании по меньшей мере частично данных, принимаемых от полезной нагрузки в виде датчика.
[41] Согласно третьему аспекту полезная нагрузка в виде датчика для обнаружения не отвечающего на запросы препятствия в воздушном пространстве возле летательного аппарата содержит:
радиолокационную станцию для радиального сканирования воздушного пространства с выдачей местоположения не отвечающего на запросы препятствия;
первый датчик для обнаружения тепловой сигнатуры не отвечающего на запросы препятствия в указанном местоположении;
второй датчик для получения изображения не отвечающего на запросы препятствия в указанном местоположении и
процессор, функционально соединенный с каждым объектом из радиолокационной станции, первого датчика и второго датчика, причем процессор выполнен с возможностью определения местоположения не отвечающего на запросы препятствия с использованием данных от радиолокационной станции и классификации не отвечающего на запросы препятствия в указанном местоположении с использованием тепловой сигнатуры от первого датчика и изображения от второго датчика.
[42] В некоторых аспектах камера включает в себя датчик длинноволнового инфракрасного излучения.
[43] В некоторых аспектах камера включает в себя электрооптический датчик, работающий в видимой и ближней инфракрасной области спектра.
[44] В некоторых аспектах радиолокационная станция представляет собой механически вращающуюся корабельную радиолокационную станцию.
[45] Вариант реализации настоящего изобретения включает в себя систему обнаружения препятствий для использования в летательном аппарате, которая может включать в себя полезную нагрузку в виде датчика для обнаружения не отвечающего на запросы препятствия в первом воздушном пространстве, которое может находиться возле летательного аппарата, при этом полезная нагрузка в виде датчика содержит радиолокационную станцию для радиального сканирования первого воздушного пространства с выработкой радиолокационной информации, имеющей первое разрешение, и камеру для получения изображения второго воздушного пространства в указанном первом воздушном пространстве с выработкой оптической информации со вторым разрешением, которое может быть выше, чем первое разрешение; и процессор, функционально соединенный с полезной нагрузкой в виде датчика, причем процессор может быть выполнен с возможностью определения местоположения не отвечающего на запросы препятствия и определения не отвечающего на запросы препятствия в виде функции радиолокационной информации и оптической информации. Камера может быть выполнена с возможностью панорамирования и наклона. Камера может включать в себя датчик длинноволнового инфракрасного излучения. Камера может включать в себя электрооптический датчик, работающий в видимой и ближней инфракрасной области спектра. Оптическая информация может включать в себя по меньшей мере одно из теплового сечения и оптического сечения. Радиолокационная информация может включать в себя радиолокационное сечение. Радиолокационная информация может включать в себя двумерное местоположение не отвечающего на запросы препятствия в первом воздушном пространстве, а оптическая информация может включать в себя азимутальное положение не отвечающего на запросы препятствия во втором воздушном пространстве. Процессор может быть выполнен с возможностью выработки прогнозируемой траектории полета для не отвечающего на запросы препятствия на основании, по меньшей мере частично, радиолокационной информации и оптической информации. Процессор может быть выполнен с возможностью выработки маршрута полета, обеспечивающего уклонение от препятствий, для предупреждения столкновения с не отвечающими на запросы препятствиями на основании, по меньшей мере частично, прогнозируемой траектории полета. Первое воздушное пространство может обеспечивать поле обзора величиной 360 градусов вокруг летательного аппарата. Поле обзора величиной 360 градусов может оставаться в плоскости, которая может быть параллельна линии полета, задаваемой летательным аппаратом.
[46] Еще один вариант реализации настоящего изобретения включает в себя способ обнаружения и уклонения от не отвечающего на запросы препятствия во время эксплуатации летательного аппарата, включающий:
сканирование первого воздушного пространства с использованием радиолокационной системы для выработки радиолокационной информации, имеющей первое разрешение;
получение изображения второго воздушного пространства с использованием камеры для выработки оптической информации со вторым разрешением, которое может быть выше, чем первое разрешение, причем второе воздушное пространство может находиться в указанном первом воздушном пространстве;
отслеживание не отвечающего на запросы препятствия на основании по меньшей мере частично радиолокационной информации и оптической информации;
выработку прогнозируемой траектории полета на основании по меньшей мере частично радиолокационной информации и оптической информации;
выработку маршрута полета, обеспечивающего уклонение от препятствий, для уклонения от не отвечающего на запросы препятствия и
сообщение маршрута полета, обеспечивающего уклонение от препятствий, в систему управления полетом летательного аппарата.
Летательный аппарат может быть выполнен с возможностью автономного выполнения выработанного маршрута полета, обеспечивающего уклонение от препятствий. Камера может включать в себя датчик длинноволнового инфракрасного излучения, выполненный с возможностью панорамирования и наклона. Способ также может включать определение азимутального положения не отвечающего на запросы препятствия во втором воздушном пространстве с использованием камеры. Радиолокационная станция может представлять собой механически вращающуюся корабельную радиолокационную станцию. Радиолокационная информация может включать в себя двумерную карту радиального представления для первого воздушного пространства. Способ также может включать выработку посредством процессора прогнозируемой траектории полета для не отвечающего на запросы препятствия на основании по меньшей мере частично данных, принимаемых от полезной нагрузки в виде датчика.
[47] Еще один вариант реализации настоящего изобретения включает в себя полезную нагрузку в виде датчика для обнаружения не отвечающего на запросы препятствия в воздушном пространстве возле летательного аппарата, при этом полезная нагрузка в виде датчика включает в себя:
радиолокационную станцию для радиального сканирования воздушного пространства с выдачей местоположения не отвечающего на запросы препятствия;
первый датчик для обнаружения тепловой сигнатуры не отвечающего на запросы препятствия в указанном местоположении;
второй датчик для получения изображения не отвечающего на запросы препятствия в указанном местоположении; и
процессор, функционально соединенный с каждым объектом из радиолокационной станции, первого датчика и второго датчика, причем процессор может быть выполнен с возможностью определения местоположения не отвечающего на запросы препятствия с использованием данных от радиолокационной станции и классификации не отвечающего на запросы препятствия в указанном местоположении с использованием тепловой сигнатуры от первого датчика и изображения от второго датчика.
Камера может включать в себя датчик длинноволнового инфракрасного излучения. Камера может включать в себя электрооптический датчик, работающий в видимой и ближней инфракрасной области спектра.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[48] Эти и другие преимущества настоящего изобретения можно легко уяснить со ссылкой на следующее описание и прилагаемые чертежи, на которых:
[49] На ФИГ. 1а показана структурная схема приводимой в качестве примера системы автоматизации работы летного экипажа.
[50] На ФИГ. 1b показан приводимый в качестве примера поток информационных данных между подсистемами по ФИГ. 1а.
[51] На ФИГ. 1с показана структурная схема приводимой в качестве примера базовой платформы.
[52] На ФИГ. 2 показана схема приводимой в качестве примера архитектуры базовой платформы.
[53] На ФИГ. 3а показан первый приводимый в качестве примера человеко-машинный интерфейс, иллюстрирующий приложение работы с маршрутом.
[54] на ФИГ. 3b показан второй приводимый в качестве примера человеко-машинный интерфейс, иллюстрирующий карту контрольных проверок и экран выдачи предупреждений об исправности летательного аппарата.
[55] На ФИГ. 3с-3е показан третий пример человеко-машинного интерфейса, иллюстрирующий домашний экран для обнаружения препятствий.
[56] На ФИГ. 4 показана структурная схема приводимой в качестве примера системы
контроля летательного аппарата, имеющего систему восприятия.
[57] На ФИГ. 5а и 5b показана приводимая в качестве примера система основных исполнительных механизмов.
[58] На ФИГ. 5c показана приводимая в качестве примера система вспомогательных исполнительных механизмов.
[59] На ФИГ. 6а показаны приводимые в качестве примера радиолокационная станция и создаваемый ею радиолокационный луч.
[60] На ФИГ. 6b показаны приводимые в качестве примера инфракрасная камера и инфракрасный луч, создаваемый ею относительно радиолокационного луча.
[61] На ФИГ. 7 показан приводимый в качестве примера летательный аппарат с фиксированным крылом, имеющий гондолу для полезной нагрузки для размещения полезной нагрузки, выполненной в виде датчика обнаружения препятствий.
[62] На ФИГ. 8а-8с схематично показан пример гибридного поля обзора, создаваемого радиолокационной станцией и инфракрасной камерой.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[63] Предпочтительные варианты реализации настоящего изобретения будут описаны ниже со ссылкой на прилагаемые чертежи. В нижеследующем описании хорошо известные функции или конструкции не описаны подробно, поскольку они могут затенять изобретение ненужными подробностями. Для данного раскрытия применяются следующие термины и определения.
[64] При использовании в настоящем документе термины "схемы" и "схема" относятся к физическим электронным компонентам (т.е. аппаратным средствам) и любому программному обеспечению и/или прошивке ("коду"), которые могут конфигурировать аппаратные средства, быть исполнены аппаратными средствами и/или иным образом связаны с аппаратными средствами. При использовании в настоящем документе, например, конкретный процессор и память могут содержать первую "схему" при исполнении первого набора одной или более строк кода и могут содержать вторую "схему" при исполнении второго набора одной или более строк кода.
[65] При использовании в настоящем документе "и/или" означает любой один или более элементов в списке, соединенных "и/или". В качестве примера "х и/или y" означает любой элемент трехэлементного множества {(х), (y), (х, y)}. Иными словами, "х и/или y" означает "одно или оба из х и y". В качестве другого примера "х, y и/или z" означает любой элемент семиэлементного множества {(х), (y), (z), (х, y), (х, z), (y, z), (х, y, z)}. Иными словами, "х, y и/или z" означает "одно или более из х, y и z".
[66] При использовании в настоящем документе термин "примерный" означает использование в качестве неограничивающего примера, экземпляра или иллюстрации. При использовании в настоящем документе термин "например" содержит списки одного или более неограничивающих примеров, экземпляров или иллюстраций.
[67] При использовании в настоящем документе слова "примерно" и "приблизительно", при использовании для изменения или описания значения (или диапазона значений), означают разумно близкое к этому значению или диапазону значений. Таким образом, варианты реализации, описанные в настоящем документе, не ограничены только приведенными значениями и диапазонами значений, а наоборот должны включать в себя разумно выполнимые отклонения.
[68] При использовании в настоящем документе схема или устройство "выполнена или выполнено с возможностью" выполнения функции всякий раз, когда схема или устройство содержит необходимое аппаратное обеспечение и код (если это необходимо) для выполнения функции независимо от того, отключено ли выполнение этой функции или она не задействована (например, настраиваемой пользователем настройкой, заводской настройкой и т.п.).
[69] При использовании в настоящем документе термины "воздушное транспортное средство" и "летательный аппарат" относятся к машине, способной совершать полет, включая, но без ограничения, традиционные летательные аппараты и летательные аппараты вертикального взлета и посадки, а также включая как пилотные, так и беспилотные летательные аппараты (БПЛА). Летательные аппараты вертикального взлета и посадки могут включать в себя летательные аппараты с фиксированным крылом (например, штурмовики типа "Харриер"), винтокрылые летательные аппараты (например, вертолеты) и/или летательные аппараты с наклонным ротором/наклонным крылом.
[70] При использовании в настоящем документе термины "связь" и "сообщение" относятся к (1) передаче или иному сообщению данных от источника до пункта назначения и/или (2) подаче данных на носитель, систему, канал, сеть, устройство, провод, кабель, волокно, схему и/или линию связи для передачи в пункт назначения.
[71] Термин "база данных" при использовании в настоящем документе означает организованный массив связанных данных независимо от способа представления данных или их организованного массива. Например, организованный массив связанных данных может быть в виде одного или более из следующего: таблицы, карты, решетки, пакета, датаграммы, фрейма, файла, электронной почты, сообщения, документа, отчета, списка или данных, представленных в любой другой форме.
[72] При использовании в настоящем документе термин "процессор" означает обрабатывающие устройства, аппараты, программы, схемы, компоненты, системы и подсистемы, независимо от того, реализованы ли они аппаратно, материально реализованным программным обеспечением или и тем, и другим, и являются ли они программируемыми или нет. Термин "процессор" при использовании в настоящем документе включает в себя, но без ограничения, одно или более обрабатывающих устройств, проводные схемы, устройства и системы для изменения сигнала, системы и устройства для управления системами, центральными процессорами, программируемыми устройствами и системами, программируемые логические матрицы типа FPGA, специализированные интегральные схемы, системы на чипе, системы, содержащие дискретные элементы и/или схемы, конечные автоматы, виртуальные машины, процессоры обработки данных, средства обработки и комбинации любого из вышеперечисленного. Процессор может представлять собой, например, микропроцессор или микроконтроллер общего назначения любого типа или процессор цифровой обработки сигналов (digital signal processing, DSP), специализированную интегральную схему (application-specific integrated circuit, ASIC). Процессор может быть встроен в запоминающее устройство или соединен с ним.
[73] При использовании в настоящем документе термин "запоминающее устройство" означает компьютерное оборудование или схему для хранения информации для использования процессором. Запоминающее устройство может быть любым подходящим типом компьютерной памяти или любым другим типом электронного носителя для хранения, таким как, например, постоянное запоминающее устройство (read-only memory, ROM), оперативное запоминающее устройство (random access memory, RAM), кэш-память, постоянное запоминающее устройство на компакт-диске (compact disc read-only memory, CD-ROM), электрооптическая память, магнитооптическая память, программируемое постоянное запоминающее устройство (programmable read-only memory, PROM), стираемая программируемая постоянная память (erasable programmable read-only memory, EPROM), электрически стираемая программируемая постоянная память (electrically-erasable programmable read-only memory, EEPROM), компьютерочитаемый носитель или т.п.
[74] В настоящем документе раскрыта автоматизированная система обнаружения и уклонения, выполненная с возможностью автоматического обнаружения и уклонения от препятствий во время эксплуатации летательного аппарата. Система обнаружения и уклонения может быть реализована практически в любых летательных аппаратах, включая те, которые выполнены с возможностью управления пилотом, автопилотом или другой автоматизированной системой управления полетом. Например, автоматизированная система обнаружения и уклонения может быть использована на небольших автономных летательных аппаратах, для которых соответствие правилам Предупреждения столкновения самолетов в воздухе нецелесообразно с экономической точкой зрения, не является возможным или необходимым, или качестве альтернативы радиолокационным антенным решеткам, обеспечивающим связь "воздух - воздух" на крупных летательных аппаратах, для обнаружения и уклонения от не отвечающих на запросы препятствий, которые в противном случае останутся необнаруженными.
[75] Автоматизированная система обнаружения и уклонения будет в целом описана в связи с системой автоматизации работы летного экипажа, которая выполнена с возможностью работы в качестве автоматизированного помощника пилота (или второго пилота) или бортинженера. Пример системы автоматизации работы летного экипажа раскрыт в принадлежащей заявителю публикации заявки на патент США №15/464,786 авторов Jessica Е. Duda и др., поданной 21 марта 2017 г.и озаглавленной "Aircrew Automation System and Method" (Система и способ автоматизации работы летного экипажа) ("заявка 786").
[76] Как раскрыто в заявке 786, система автоматизации работы летного экипажа может быть выполнена с возможностью управления летательным аппаратом от взлета до посадки с автоматическим исполнением необходимых действий в полете и плана полета, карт контрольных проверок и процедур на правильных этапах полета с одновременным обнаружением нештатных ситуаций и реагированием на них. В то же время пилот (например, пилот или оператор, являющийся человеком) может непрерывно получать информацию посредством интуитивно понятного человеко-машинного интерфейса, функционально соединяемого с системой автоматизации работы летного экипажа. Другими словами, система автоматизации работы летного экипажа может обеспечивать выдачу пилоту информации и/или обратную связь для него в реальном времени. Например, система автоматизации работы летного экипажа может указывать состояние летательного аппарата относительно выполняемой процедуры. Система автоматизации работы летного экипажа может быть выполнена с возможностью, если это необходимо, взятия на себя управления летательным аппаратом посредством роботизированных исполнительных механизмов.
[77] В отличие от существующих роботизированных автопилотов и систем помощи при пилотировании, которые требуют установки со вскрытием блоков, требуют значительного опыта при установке и учета особенностей конкретного летательного аппарата, система автоматизации работы летного экипажа может использовать системную архитектуру и систему накопления знаний, что обеспечивает быструю установку без вскрытия блоков, что в свою очередь способствует широкому использованию и обеспечивает возможность быстрого приспособления предлагаемой системы автоматизации работы летного экипажа к использованию на различных летательных аппаратах. Кроме того, сбор данных системой автоматизации работы летного экипажа, системы восприятия и системы полезной нагрузки в виде датчика не ограничены системой GPS, ускорениями, ориентацией и курсом, как в случае с существующими роботизированными автопилотами. По существу, система автоматизации работы летного экипажа увеличивает возможности существующих систем сбора данных и восприятия для лучшего захвата эксплуатационных данных летательного аппарата посредством использования как отдельных датчиков, захвата данных изображения приборов (например, температуры, высоты, РЛС, углов отклонения закрылков и т.п.), так и измерения, обнаружения или иного приема входящих сигналов управления от пилота. Кроме того, базовая платформа системы автоматизации работы летного экипажа и конструкция систем основных и вспомогательных исполнительных механизмов для управления полетом обеспечивает возможность транспортабельности системы внутри самых разных летательных аппаратов. Таким образом, в отличие от существующих роботизированных автопилотов или систем помощи при пилотировании предлагаемая система автоматизации работы летного экипажа может быть временно установлена и легко перенесена с одного летательного аппарата на другой без такой модификации летательного аппарата, которая требует вскрытия его блоков. Система автоматизации работы летного экипажа благодаря своей модульной конструкции дополнительно уменьшает вероятность выработки односторонних решений, использование которых становится устаревшим по мере развития летательных аппаратов.
[78] Комбинирование подсистем системы автоматизации работы летного экипажа дает пилоту высокоточное знание о физическом состоянии летательного аппарата и уведомляет пилота о любых отклонениях в предполагаемом состоянии на основании, например, прогностических моделей. Эта осведомленность о состоянии может быть переведена непосредственно в полезную информацию для пилота, такую как предупреждения о развитии аварийных условий, вычисление уровня топлива, уведомление об условиях обледенения, предупреждение о непосредственном столкновении с препятствием, уведомление об обнаруженных не отвечающих на запросы препятствиях и т.п. Например, система автоматизации работы летного экипажа также может служить в качестве цифрового бортинженера и выдавать пилоту рекомендации во время контроля выполнения карт контрольных проверок, приборов, состояния двигателя, воздушного пространства, режима полета и т.п.
[79] Эта внештатная система автоматизации работы летного экипажа, которая может быть установлена без вскрытия блоков в уже существующих летательных аппаратах, воспринимает состояние летательного аппарата визуально и посредством других датчиков, получает вектор состояния летательного аппарата и другую информацию о летательном аппарате и сообщает о любых отклонениях от предполагаемого состояния летательного аппарата пилоту или на вышку контрольно-диспетчерского пункта управления воздушным движением. Хотя система автоматизации работы летного экипажа может быть установлена без вскрытия блоков (например, посредством системы восприятия), в альтернативном варианте реализации она может быть установлена со вскрытием блоков. Например, система автоматизации работы летного экипажа может быть электронно соединена с приборной панелью кабины (например, через обратную сторону приборной панели) посредством, например, системы контроля состояния летательного аппарата. В альтернативном варианте реализации система автоматизации работы летного экипажа может быть встроенной и установленной постоянно во время изготовления летательного аппарата. В сочетании с системой исполнительных механизмов система автоматизации работы летного экипажа также может брать на себя управление летательным аппаратом и автономно управлять его перемещением. Таким образом, различные системы и подсистемы системы автоматизации работы летного экипажа могут требовать вскрытия блоков, не требовать вскрытия блоков или представлять собой комбинацию указанного.
[80] Архитектура системного уровня.
Для распределения обязанностей и рабочей нагрузки, связанных с выполнением полета, система 100 автоматизации работы летного экипажа должна быть способна выполнять действия, которые пилот выполняет в обычном режиме в течение всего полета независимо от модификации, модели или типа летательного аппарата. Пример архитектуры системы 100 автоматизации работы летного экипажа в соответствии с одним аспектом показан на ФИГ. 1а-1c. Как показано на ФИГ. 1а, центральная подсистема, управляемая процессором, может работать в качестве базовой платформы 102 для соединия одной или более подсистем посредством одного или более интерфейсов. Подсистемы могут сообщаться друг с другом через программные и/или аппаратные интерфейсы 156 с использованием проводных и/или беспроводных протоколов и аппаратных средств связи. На ФИГ. 1b показан приводимый в качестве примера поток информации (например, данных) между различными подсистемами.
[81] Каждая из указанного множества подсистем системы 100 автоматизации работы летного экипажа может быть модульной, так что вся система 100 автоматизации работы летного экипажа по существу может быть быстро перенесена на другой летательный аппарат. Например, различные подсистемы могут быть съемными и соединяться с возможностью связи друг с другом посредством базовой платформы 102 с использованием одного или более программных и/или аппаратных интерфейсов 156. Однако в некоторых аспектах система 100 автоматизации работы летного экипажа или ее части альтернативно могут быть неотъемлемой частью системы летательного аппарата и поэтому непосредственно использовать датчики и индикаторы в самолете. Например, система 100 автоматизации работы летного экипажа или ее компоненты могут быть встроены в летательный аппарат во время его проектирования и изготовления.
[82] Указанное множество подсистем могут включать в себя, например, систему 106 восприятия, систему 108 исполнительных механизмов, систему 104 на основе человеко-машинного интерфейса, систему 116 управления полетом и полезную нагрузку 162 в виде датчика обнаружения препятствий, каждая из которых может быть функционально соединена с базовой платформой 102. В некоторых аспектах необходимость в системе 106 восприятия может быть ослаблена или устранена посредством использования еще одной системы контроля состояния летательного аппарата. Например, система 100 автоматизации работы летного экипажа может быть соединена (например, с возможностью связи или электронно) с приборной панелью или иным образом выполнена за одно целое с летательным аппаратом или его существующими системами. Однако, как можно ожидать, такая интеграция весьма вероятно потребует определенной модификации летательного аппарата или его проводки.
[83] Система 100 автоматизации работы летного экипажа и/или базовая платформа 102 также может содержать систему 114 накопления знаний и систему 122 связи или быть функционально соединена с ними. Модульная конфигурация также позволяет оператору удалять/отключать ненужные системы или модули или добавлять/устанавливать дополнительные системы или модули. Например, когда система 100 автоматизации работы летного экипажа выполнена только с возможностью выдачи информации пилоту посредством системы 104 на основе человеко-машинного интерфейса (т.е. без возможности управления летательным аппаратом), система 108 исполнительных механизмов может быть удалена или отключена для уменьшения веса, затрат и/или потребления электроэнергии. Соответственно, в зависимости от конфигурации система 100 автоматизации работы летного экипажа может быть выполнена с меньшим количеством или дополнительными модулями, компонентами или системами без отклонения от сущности и объема изобретения.
[84] При работе система 116 управления полетом получает информацию о состоянии летательного аппарата на основании информационных данных от другой подсистемы (например, системы 112 контроля состояния летательного аппарата, системы 106 восприятия, полезной нагрузки 162 в виде датчика обнаружения препятствий) и управляет работой другой подсистемы (например, системы 108 исполнительных механизмов, системы 116 управления полетом) (например, динамически) так, чтобы поддерживать устойчивость летательного аппарата. По существу, система 116 управления полетом может принимать команды режимов транспортного средства и данные конфигурации от базовой платформы 102 с отправкой в базовую платформу 102 информации о состоянии и командах, вырабатываемых системой 116 управления полетом. Например, базовая платформа 102 может быть выполнена с возможностью передачи одной или более команд в систему 116 управления полетом летательного аппарата на основании, по меньшей мере частично, данных о полетной ситуации, которые могут быть получены от системы 112 контроля состояния летательного аппарата, системы 106 восприятия, полезной нагрузки 162 в виде датчика обнаружения препятствий и/или их сочетания.
[85] Система 116 управления полетом может включать в себя существующие устройства или системы управления полетом, например, используемые в летательных аппаратах с фиксированным крылом и винтокрылых летательных аппаратах, или сообщаться с существующими устройствами или системами управления полетом. Система 122 связи обеспечивает возможность сообщения системы 100 автоматизации работы летного экипажа с другими устройствами (включая удаленные или дистанционные устройства), например, по сети. Система 122 связи может принимать команды связи и данные конфигурации от базовой платформы 102 при отправке в базовую платформу 102 информации о состоянии и реагировании от системы 122 связи.
[86] Базовая платформа 102.
На ФИГ. 2 схематично показана архитектура приводимой в качестве примера базовой платформы 102. Для обеспечения работы системы 100 автоматизации работы летного экипажа, независящей от транспортного средства, базовая платформа 102 может представлять собой центральную подсистему, управляемую процессором, чтобы обеспечивать промежуточное программное обеспечение или иным образом способствовать/служить в качестве промежуточного программного обеспечения, которое может быть выполнено специально для конкретного летательного аппарата или конкретной конфигурации посредством фазы начального перехода и настройки. Иными словами, система 110 управления выполнением задания может обеспечивать операционную систему 206, которая предоставляет услуги для набора оперативных приложений 202 и обеспечивает выдачу выходных сигналов на одно или более из комплекта аппаратных интерфейсов 204 или системы 104 на основе человеко-машинного интерфейса при выполнении сбора и регистрации данных, необходимых для задействования этих приложений.
[87] Базовая платформа 102 служит в качестве основного автономного агента и средства принятия решения, которые объединяют сигналы, поступающие от системы 106 восприятия, системы 112 контроля состояния летательного аппарата, полезной нагрузки 162 в виде датчика обнаружения препятствий и системы 104 на основе человеко-машинного интерфейса, с приобретенной ими базой знаний для определения общего состояния систем летательного аппарата. Базовая платформа 102 может обрабатывать сигналы, поступающие от различных комплектов датчиков, и сводить получаемую в результате информацию с получением понимания текущего состояния летательного аппарата. Получаемая в результате информация может сравниваться с файлом для конкретного летательного аппарата, который охватывает понимание системой 100 автоматизации работы летного экипажа намерений пилота, состояния системы и понимание соответствующих процедур для летательного аппарата в той мере, в которой они относятся к оценке состояния системы 100 автоматизации работы летного экипажа. Получаемые в результате знания о состоянии и соответствующие рекомендации могут быть переданы человеку-пилоту посредством системы 104 на основе человеко-машинного интерфейса или, в некоторых аспектах, в систему 116 управления полетом и/или систему 108 исполнительных механизмов для обеспечения автономной работы. Например, базовая платформа 102 может сообщать информацию, отражающую обнаруженное не отвечающее на запросы препятствие на траектории, ведущей к столкновению с летательным аппаратом, которое может быть обнаружено полезной нагрузкой 162, выполненной в виде датчика обнаружения препятствий, в систему управления полетом (например, систему 116 управления полетом, которая может быть существующей системой управления полетом летательного аппарата) для инициирования маршрута полета, обеспечивающего уклонение от препятствий, вырабатываемого базовой платформой 102.
[88] Базовая платформа 102 может также содержать регистратор полетных данных, например, для обеспечения возможности анализа рабочих характеристик и обеспечения устойчивости к сбросу данных в полете. Система 100 автоматизации работы летного экипажа также может создавать журнал данного полета для последующего анализа, который может быть использован для обеспечения подготовки пилотов и который может обеспечивать составление подробных оперативных отчетов о летной подготовке и действиях, выполняемых в полете. Журналы могут быть использованы в связи, например, с анализом обеспечения качества полетных операций, анализом технического обслуживания и т.п.
[89] Как показано на чертежах, базовая платформа 102 может содержать систему 110 управления выполнением задания и полетные контроллеры 118, каждый из которых выполнен с возможностью связи друг с другом и другими подсистемами посредством одного или более программных и/или аппаратных интерфейсов 156, которые могут представлять собой сочетание аппаратных средств (например, постоянных или съемных коннекторов) и программного обеспечения. Базовая платформа 102 может служить главным компьютером для различных программных процессов, сохраняемых в запоминающем устройстве, которое отслеживает состояние летательного аппарата, отвечающих на запросы препятствий, не отвечающих на запросы препятствий и процедур, а также любых модулей для анализа тенденций (выдачи предупреждений с упреждением) и стандартных программ машинного обучения. В некоторых аспектах система 100 автоматизации работы летного экипажа и/или базовая платформа 102 могут использовать компьютерную шину и спецификацию (например, в качестве интерфейса), которая способствует обнаружению аппаратного компонента подсистемы в системе 100 автоматизации работы летного экипажа без необходимости в физическом конфигурировании устройства или вмешательства пользователя при разрешении конфликтов ресурсов. Такая конфигурация может быть названа "Plug-and-Play". Таким образом, пользователь может легко добавлять системы или подсистемы (например, в виде модулей) в систему 100 автоматизации работы летного экипажа или удалять их посредством базовой платформы 102 без каких-либо существенных изменений или усилий по интеграции.
[90] Выходные сигналы базовой платформы 102 могут быть использованы для передачи сообщений в систему 104 на основе человеко-машинного интерфейса. Сообщения могут указывать, например, на выполнение карт контрольных проверок, начало возникновения нештатных ситуаций, выдачу предупреждений об увеличении высоты, местоположение не отвечающих на запросы препятствий, возможные маршруты олета, обеспечивающие уклонение от препятствий, и т.п. Аппаратные средства и различные компьютеры также могут иметь защищенное исполнение и размещаться в одном корпусе с другими устройствами, такими как компьютер восприятия. Как раскрыто ниже, базовая платформа 102 может быть функционально соединена с инерциально-спутниковой (GPS) навигационной системой 154, полезной нагрузкой 162 в виде датчика обнаружения препятствий и системой управления питанием (например, мощностью 28 В постоянного тока).
[91] Система 110 управления выполнением задания обычно содержит устройство 132 управления выполнением задания, стандартный интерфейс 130 (например, принятый в НАТО интерфейс согласно Соглашению по стандартизации STANAG), устройство 158 управления осведомленностью о состоянии и другие рабочие компоненты 120 (например, аппаратные и программные контроллеры и/или интерфейсы), каждый из которых соединен с возможностью связи друг с другом посредством одной или более шин 124 данных. Например, один из рабочих компонентов 120 может представлять собой маршрутное устройство 160 управления. Маршрутное устройство 160 управления может отслеживать как не отвечающие на запросы препятствия, так и отвечающие на запросы препятствия с использованием данных от полезной нагрузки 162, выполненной в виде датчика обнаружения препятствий, для выработки прогнозируемой траектории полета для каждого из указанных не отвечающих на запросы препятствий и отвечающих на запросы препятствий. На основании, по меньшей мере частично, прогнозируемых траекторий полета маршрутное устройство 160 управления может вырабатывать маршрут полета, обеспечивающий уклонение от препятствий, для летательного аппарата для уклонения от столкновения с не отвечающими и/или отвечающими на запросы препятствиями, или смягчения последствий иным образом. При выработке маршрута полета, обеспечивающего уклонение от препятствий, маршрутное устройство 160 управления также может учитывать местность и любые ограничения летательного аппарата, которые могут определяться конфигурацией летательного аппарата (например, многовинтовой летательный аппарат по сравнению с летательным аппаратом с неподвижным крылом). Например, многовинтовой летательный аппарат может быстрее переходить от горизонтального полета к полету с зависанием. Другие ограничения летательного аппарата могут быть определены в эксплуатационной документации для данного летательного аппарата.
[92] Открытая архитектура базовой платформы 102 обеспечивает возможность ввода дополнительных данных, принимаемых от систем посредством шины 124 данных. В некоторых аспектах система 110 управления выполнением задания может быть соединена с одним или более приборами кабины летательного аппарата посредством системных интерфейсов транспортного средства для сбора данных о полетной ситуации. В других аспектах система 110 управления выполнением задания может собирать данные о полетной ситуации через интерфейс состояния летательного аппарата посредством системы 112 контроля состояния летательного аппарата, которая может собирать или вырабатывать данные о полетной ситуации посредством прямого соединения с летательным аппаратом, системой 106 восприятия и/или полезной нагрузкой 162, выполненной в виде датчика обнаружения препятствий.
[93] Как показано на чертежах, система 110 управления выполнением задания функционально может быть соединена с системой 108b вспомогательных исполнительных механизмов (например, при необходимости автономной работы), системой 106 восприятия, полезной нагрузкой 162, выполненной в виде датчика обнаружения препятствий, и системой 104 на основе человеко-машинного интерфейса, включая человеко-машинный интерфейс 126 (например, программное обеспечение и/или аппаратные средства, которые передают сигналы, поступающие от пилота, и отображают для него информацию) и наземной станцией 128. Система 110 управления выполнением задания может сообщаться с полетными контроллерами 118 посредством устройства 132 управления выполнением задания.
[94] Полетные контроллеры 118 могут включать в себя, например, устройство 134 управления автопилотом и устройство 136 управления транспортным средством. Устройство 136 управления транспортным средством может быть в целом ответственно за навигацию и определение местоположения и состояния летательного аппарата. Устройство 136 управления транспортным средством может быть соединено с модулем 142 оценки состояния, который определяет оцениваемое состояние летательного аппарата с использованием информации, принимаемой от системы 106 восприятия посредством модуля 138 восприятия, от полезной нагрузки 162, выполненной в виде датчика обнаружения препятствий, и от инерциально-спутниковой (GPS) навигационной системы 154 посредством навигационного модуля 140.
[95] Устройство 134 управления автопилотом в целом может быть ответственно за управление полетом летательного аппарата на основании, например, информации, принимаемой от устройства 136 управления транспортным средством и системы 110 управления выполнением задания. Устройство 134 управления автопилотом управляет, помимо прочего, системой 152 управления полетом, которая может быть новой или ранее существующей (и содержит полетный контроллер 150), а также модулем 144 исполнительных механизмов обеспечения автоматизации работы летного экипажа и модулем 146 исполнительных механизмов летательного аппарата. Модуль 144 исполнительных механизмов обеспечения автоматизации работы летного экипажа может управлять системой 108а основных исполнительных механизмов, модуль 146 исполнительных механизмов летательного аппарата может управлять органами 148 управления летательного аппарата (например, различными полетными поверхностями и исполнительными механизмами). Устройство 134 управления автопилотом может быть выполнено с возможностью приема и реализации одного или более маршрутов от маршрутного устройства 160 управления, в том числе маршрута полета, обеспечивающего уклонение от препятствий.
[96] В некоторых аспектах компоненты полетного контроллера 118 могут перекрываться с определенными компонентами системы 116 управления полетом. Например, в некоторых аспектах (например, когда резервирование нежелательно и возможна установка без вскрытия блоков) базовая платформа 102 может использовать часть существующего программного обеспечения и/или аппаратных средств летательного аппарата, что устраняет необходимость в дополнительных аппаратных средствах, таких как некоторые компоненты полетного контроллера 118 и/или инерциально-спутниковая (GPS) навигационная система 154.
[97] Открытая архитектура.
Базовая платформа 102 служит в качестве центральной подсистемы, или интерфейса, системы 100 автоматизации работы летного экипажа, которая или который в открытой архитектуре соединяет остальные подсистемы и управляет ими (например, как отдельными приложениями). Такие остальные подсистемы включают в себя, например, систему 116 управления полетом (включая любые характеристики плана полета), систему 104 на основе человеко-машинного интерфейса, систему 108 исполнительных механизмов (например, системы основных и вспомогательных исполнительных механизмов для обеспечения при необходимости автономной работы), систему 106 восприятия, систему 114 накопления знаний, полезную нагрузку 162 в виде датчика обнаружения препятствий и другие подсистемы 236. Таким образом, управление указанными другими аппаратными средствами системы 100 автоматизации работы летного экипажа может быть обеспечено конкретными приложениями, специфичными для конкретной части аппаратных средств, что позволяет быстро интегрировать новые системы или другую внешнюю технологию поддержки плана полета.
[98] Архитектура базовой платформы 102 обеспечивает возможность быстрой транспортировки и расширяемости при переходе на новый летательный аппарат или включение новой функции/возможности плана полета. Таким образом, приложение может быть использовано для того, чтобы позволить системе 100 автоматизации работы летного экипажа получать информацию, характерную или иным образом необходимую для этого летательного аппарата или для обеспечения указанных новых возможностей. Например, переход и настройка могут обрабатываться отдельными приложениями, работающими в базовой платформе 102 или других подсистемах, представляющими функциональные возможности, характерные для летательного аппарата, а также растущую библиотеку возможностей системы 100 автоматизации работы летного экипажа, которая может быть обменена в зависимости от плана полета, требования к летательному аппарату или экипажу. В некоторых аспектах процесс перехода может поддерживаться программными приложениями, являющимися внешними по отношению к системе 100 автоматизации работы летного экипажа (такими как редактор процедур).
[99] Структура 208 данных летательного аппарата.
Операционная система 206 работает в качестве промежуточного программного обеспечения, связывающего между собой оперативные приложения 202, аппаратные интерфейсы 204 и другие подсистемы, такие как система 114 накопления знаний. Операционная система 206 может использовать структуру 208 данных летательного аппарата, которая может включать в себя базу 210 данных знаний, базу 212 данных процедур и базу 214 данных состояния.
[100] Структура 208 данных летательного аппарата способствует работе системы 100 автоматизации работы летного экипажа, не зависящей от транспортного средства, посредством обеспечения для базовой платформы 102 возможности получения полного понимания систем летательного аппарата, их конфигурации и процедур, необходимых для поддержания надежной работы, а также всех других знаний и компетенций, которыми должен обладать квалифицированный пилот этого летательного аппарата. Структура 208 данных летательного аппарата может быть заполнена системой 114 накопления знаний (раскрытой ниже), которая содержит необходимую информацию о летательном аппарате, эксплуатируемом в настоящее время (например, модель управления полетом, эксплуатационные процедуры, системы летательного аппарата и т.п.), данные, принятые от внутренних датчиков состояния и других подсистем или датчиков (например, полезной нагрузки 162 в виде датчика обнаружения препятствий).
[101] Структура 208 данных летательного аппарата может быть заполнена и настроена для конкретного летательного аппарата во время фазы накопления знаний (например, во время первоначальной настройки) таким образом, что она содержит всю информацию, необходимую для управления летательным аппаратом. Например, при переходе на новый летательный аппарат система 114 накопления знаний может выполнять заданные действия для определения компоновки (например, контроллеров/показателей считывания, например приборов кабины), рабочих параметров и других характеристик летательного аппарата. Заданные действия могут включать в себя, например:
(1) создание модели систем летательного аппарата, которая несет информацию для системы 100 автоматизации работы летного экипажа о том, какие системы находятся на борту и их конфигурации, о пределах срабатывания исполнительных механизмов и т.п.;
(2) кодификацию процедур, которая несет информацию для системы 100 автоматизации работы летного экипажа о том, как эксплуатировать летательный аппарат в нормальных и ненормальных ситуациях, включая кодификацию карт контрольных проверок;
(3) аэродинамическую модель, которая несет информацию для системы 100 автоматизации работы летного экипажа о том, как управлять полетом летательного аппарата и какие будут характеристики при данных конфигурациях летательного аппарата; и
(4) информацию об операциях по выполнению задания.
[102] Базовая платформа 102 может объединять эту информацию с данными от набора внутренних датчиков состояния, что также улучшает резервирование и надежность системы с обеспечением для системы 100 автоматизации работы летного экипажа возможности выработки высокоточной оценки состояния летательного аппарата и состояния системы, и определения отклонения от предполагаемого поведения. Во время полета структура данных динамически обновляется за счет данных в режиме реального времени, собираемых, помимо прочего, внутренними датчиками состояния системы 100 автоматизации для летного экипажа, системы 106 восприятия, полезной нагрузки 162 в виде датчика обнаружения препятствий, системы 104 на основе человеко-машинного интерфейса, а также системы 100 автоматизации работы летного экипажа. После заполнения структуры 208 данных летательного аппарата для данного летательного аппарата она может сохраняться в библиотеке летательного аппарата и использоваться для всех других летательных аппаратов такого же типа и такой же модели, для которых доступна система 100 автоматизации работы летного экипажа. Структура 208 данных летательного аппарата может также уточняться по мере выработки дополнительных данных и/или их сбора системой 100 автоматизации работы летного экипажа.
[103] Оперативные приложения 202.
Базовая платформа 102 может обеспечивать систему 100 автоматизации работы летного экипажа множеством оперативных приложений 202. Примеры таких оперативных приложений 202 могут включать, без ограничения, приложение 216 работы в нормальном режиме полета, приложение 218 обнаружения аномалий, приложение 220 работы в нештатной ситуации, приложение 222 сбора информации, наблюдения и разведки (например, движение по орбитам для сбора информации, наблюдения и разведки), приложение 238 распознавания тенденций или другие приложения 224 конкретных действий по плану полета, такие как приложение 316 дозаправки в воздухе и/или приложения 336 контроля полезной нагрузки в виде датчика.
[104] Приложение 216 работы в нормальном режиме полета позволяет системе 100 автоматизации работы летного экипажа совершать полет по заданному плану полета от взлета до посадки при условии отсутствия нештатных ситуаций. Приложение 216 работы в нормальном режиме полета характерно для непрерывного выполнения нормальной полетной активности, как того требует конкретная фаза полета. Заданный план полета может быть изменен в полете вследствие неожиданных нарушений, таких как метеоусловия, команды диспетчерской службы воздушного движения, воздушное движение и т.п. Например, заданный план полета может быть заменен маршрутом полета, обеспечивающим уклонение от препятствий, или другим маршрутом от маршрутного устройства 160 управления на основе по меньшей мере частично данных датчика от полезной нагрузки 162, выполненной в виде датчика обнаружения препятствий.
[105] Приложение 218 обнаружения аномалий использует методы машинного обучения для контроля состояния летательного аппарата, кластеризации и классификации входных сигналов датчиков для обнаружения возникновения ненормальных ситуаций и определения, произошла ли нештатная ситуация. Приложение 218 обнаружения аномалий выполнено с возможностью сравнения сигналов состояния, получаемых от датчиков, с набором пороговых значений, определенных в эксплуатационной документации для конкретного летательного аппарата (например, никогда не превышать заданную воздушную скорость, температуру двигателя и т.п.). Приложение 218 обнаружения аномалий также может сравнивать сигналы состояния, получаемые от датчиков, с дополнительной информацией, доступной для системы 100 автоматизации работы летного экипажа, такой как информация, принятая от полезной нагрузки 162, выполненной в виде датчика, и вырабатывать предупреждения или другие сообщения в ответ на достижение заданных или динамически определяемых пороговых значений (например, пороговые значения предупреждения и т.п.).
[106] В случае нештатной ситуации приложение 220 работы в нештатной ситуации выполняет необходимые заданные карты контрольных проверок, процедуры и действия, указанные приложением 220 работы в нештатной ситуации, для поддержания надежной работы летательного аппарата или безопасного отклонения полета. Следует отметить, что если наблюдается отклонение от предполагаемых характеристик, пилоту может быть выдано предупреждение о ненормальном состоянии, что позволяет смягчить последствия или избежать возможных ошибок. Если на работу летательного аппарата оказывает влияние определенная эксплуатационная ошибка (например, вызываемые пилотом колебания), система 100 автоматизации работы летного экипажа может идентифицировать и смягчать проявление таких событий. Если обнаружена аномалия, приложение 220 работы в нештатной ситуации информирует пилота и взаимодействует с ним посредством системы 104 на основе человеко-машинного интерфейса и в конечном счете выполняет процедуру (процедуры), необходимую (необходимые) для реагирования на аномалию. В завершении, приложение 222 сбора информации, наблюдения и разведки и другие приложения 224 обеспечения конкретных действий по плану полета могут выдавать инструкции, алгоритмы или информацию, необходимые для выполнения операций, относящихся к выполняемому заданию.
[107] Приложение 238 распознавания тенденций обеспечивает анализ появляющихся тенденций с использованием машинного обучения на основании, например, системы 114 накопления знаний. В некоторых аспектах приложение 238 распознавания тенденций может выдавать данные в приложение 218 обнаружения аномалий или иным образом инициировать его работу. Например, если приложение 238 распознавания тенденций обнаруживает нежелательную тенденцию, она может быть помечена как аномалия, и сообщение о ней может быть передано в приложение 218 обнаружения аномалий (например, когда не отвечающее на запросы препятствие обнаружено на курсе, ведущем к столкновению с летательным аппаратом).
[108] Аппаратные интерфейсы 204.
Различная информация, относящаяся к оперативным приложениям 202, передается между базовой платформой 102, системой 108а основных исполнительных механизмов, системой 108b вспомогательных исполнительных механизмов, системой 106 восприятия, полезной нагрузкой 162, выполненной в виде датчика, системой 112 контроля состояния летательного аппарата, системой 104 на основе человеко-машинного интерфейса и другими подсистемами 236 посредством, например, интерфейса 226 основных исполнительных механизмов, интерфейса 228 вспомогательных исполнительных механизмов, интерфейса 230 состояния летательного аппарата, человеко-машинного интерфейса 232 и другого интерфейса 234.
[109] Система 104 на основе человеко-машинного интерфейса.
Система 104 на основе человеко-машинного интерфейса обеспечивает для пилота (например, пилота-человека, находящего на борту или на удалении) интерфейс управления и связи. Система 104 на основе человеко-машинного интерфейса выполнена с возможностью конфигурирования для обеспечения работы в качестве устройства управления планом полета, которое обеспечивает для пилота возможность управления системой 100 автоматизации работы летного экипажа. Система 104 на основе человеко-машинного интерфейса может сочетать элементы кабин с экранной индикацией, наземных станций управления беспилотными летательными аппаратами (БПЛА) и электронных планшетов летчика для обеспечения возможности эффективной, действующей и устойчивой к скрытым отказам связи между пилотом и системой 100 автоматизации работы летного экипажа. По существу, электронный планшет летчика представляет собой электронное устройство управления информацией, которое обеспечивает возможность выполнения членами летного экипажа разнообразных функций, ранее обычно выполнявшихся с использованием бумажных носителей. Система 104 на основе человеко-машинного интерфейса может включать в себя человеко-машинный интерфейс 126, который может быть основан на графическом пользовательском интерфейсе с сенсорным экраном и/или системах распознавания речи. Человеко-машинный интерфейс 126 может использовать, например, планшетный компьютер, портативный компьютер, смартфон или их комбинацию. Человеко-машинный интерфейс 126 может быть прикреплен рядом с пилотом (например, на колонке управления - как часто прикрепляют карты контрольных проверок или на коленном ремне) зависимости от предпочтений пилота. Человеко-машинный интерфейс 126 может быть соединен с возможностью удаления с кабиной или, в некотором аспекте, использовать встроенный индикатор внутри кабины (например, существующий индикатор).
[110] На ФИГ. 3а показан приводимый в качестве примера человеко-машинный интерфейс 126, имеющий интерфейс с одним сенсорным экраном и систему распознавания речи. Система 104 на основе человеко-машинного интерфейса служит в качестве основного канала связи между пилотом и системой 100 автоматизации работы летного экипажа, обеспечивая для пилота возможность подачи команд на выполнение задач в систему 100 автоматизации работы летного экипажа и приема обратной связи или инструкций от системы 100 автоматизации работы летного экипажа, для изменения распределения задач между пилотом и системой 100 автоматизации работы летного экипажа и для выбора, какие оперативные приложения 202 в настоящее время задействованы, для системы 100 автоматизации работы летного экипажа. Как показано на ФИГ. 1b, например, система 104 на основе человеко-машинного интерфейса может принимать информацию о состоянии от подсистемы системы 100 автоматизации работы летного экипажа посредством базовой платформы 102 с отправкой в базовую платформу 102 одной или более команд изменения параметров, вырабатываемых системой 104 на основе человеко-машинного интерфейса или сигналов, поступающих от пилота. Пилот может быть удаленным (например, находиться на земле или в другом летательном аппарате) или бортовым (т.е. находиться в летательном аппарате). Таким образом, в некоторых аспектах работа системы 104 на основе человеко-машинного интерфейса может быть обеспечена удаленно по сети посредством системы 122 связи.
[111] Человеко-машинный интерфейс 126.
Как показано на ФИГ. 3а-3е, человеко-машинный интерфейс 126 может использовать графический пользовательский интерфейс на основе планшета и интерфейс распознавания речи для обеспечения голосовой связи. Задачей человеко-машинного интерфейса 126 является обеспечение возможности взаимодействия пилота с базой знаний базовой платформы 102 подобно тому, как пилот взаимодействует с человеком-бортинженером или вторым пилотом.
[112] Человеко-машинный интерфейс 126 может отображать текущее состояние системы 100 автоматизации работы летного экипажа (ее текущие настойки и задачи, за решение которых она ответственна), а также какие оперативные приложения 202 в настоящее время установлены, какие оперативные приложения запущены и, если они активны, какие действия предпринимают оперативные приложения 202. Средством отображения графического пользовательского интерфейса для человеко-машинного интерфейса 126 также могут быть очки ночного видения, выполненные совместимыми так, что он виден независимо от защитных очков пилота. Система распознавания речи может быть использована для имитирования таких устных сообщений, которые используют люди-члены летного экипажа при отработке карты контрольных проверок и связи в кабине экипажа. В некоторых аспектах распознавание речи может быть ограничено одними и теми же стандартами кодированных сообщений, используемых летным экипажем, осуществляющим пилотирование, с тем чтобы минимизировать вероятность того, что система не сможет распознать команды или перейдет в ненадлежащие режимы работы. Система распознавания речи может быть выполнена с возможностью обучения/распознавания речи данного пилота посредством протокола голосового обучения. Например, пилот может произносить заданный прописанный текст таким образом, что система распознавания речи может обучаться с учетом особенностей произношения пилота.
[113] Человеко-машинный интерфейс 126 может обеспечивать выдачу состояния и/или деталей различных операций, в том числе всей системы 100 автоматизации работы летного экипажа, посредством приложения 322 состояния автоматизации работы летного экипажа, системы 106 восприятия посредством приложения 304 состояния средств восприятия, полезной нагрузки 162 в виде датчика посредством приложения 336 контроля полезной нагрузки в виде датчика, автопилота посредством приложения 306 состояния автопилота (там, где это применимо), инерциально-спутниковой (GPS) навигационной системы 154 посредством приложения 308 состояния средств GPS и любого другого приложения или информации 310 о состоянии системы. Отображение человеко-машинного интерфейса 126 может быть настроено пилотом. Например, пилот может пожелать добавить, реорганизовать или удалить некоторые из отображаемых на дисплее значков и/или оперативных приложений 202, что может быть выполнено посредством компьютерного выбора и перетаскивания или с помощью приложения 312 настроек автоматизации работы летного экипажа. Человеко-машинный интерфейс 126 также может информировать пилота о рабочем состоянии летательного аппарата и выдавать пилоту инструкции или советы.
[114] Как показано на чертежах, человеко-машинный интерфейс 126 может иметь панель инструментов с различными выбираемыми закладками, такими как закладка 328 маршрута, закладка 330 процедур, закладка 332 калибровки и закладка 334 приложений. Когда пилот выбирает, например, закладку 334 приложений, человеко-машинный интерфейс 126 может отображать различные оперативные приложения 202, установленные в системе 100 автоматизации работы летного экипажа (например, базовой платформе 102), в том числе, например, приложение 216 работы в нормальном режиме полета, приложение 220 работы в нештатной ситуации, приложение 312 настроек автоматизации работы летного экипажа, приложение 314 контрольно-измерительных приборов, приложение 336 контроля полезной нагрузки в виде датчика и приложение 316 дозаправки в воздухе. При этом могут быть использованы дополнительные приложения для выполнения задания для способствования выполнению операций, необходимых для выполнения заданий системой 100 автоматизации работы летного экипажа.
[115] Выбор приложения 312 настроек автоматизации работы летного экипажа обеспечивает для пилота возможность изменения, перераспределения или иного редактирования настроек системы 100 автоматизации работы летного экипажа и/или установки оперативных приложений 202. Выбор приложения 314 контрольно-измерительных приборов обусловливает отображение человеко-машинным интерфейсом 126 различных рабочих условий летательного аппарата, включая, например, позицию, направление, скорость, высоту, крен, рыскание и т.п. Различные рабочие условия летательного аппарата, которые могут быть собраны от системы 106 восприятия, полезной нагрузки 162 в виде датчика обнаружения препятствий или другого датчика, могут быть отображены буквенно-цифровыми символами или графическими круговыми шкалами (например, в соответствии с настройками предпочтений пилота). Выбор значка приложения 316 дозаправки в воздухе заставляет систему 100 автоматизации работы летного экипажа реализовывать заданный протокол для способствования выполнению операций по дозаправке в воздухе или координирования таких операции. Например, при выборе приложения 316 дозаправки в воздухе система автоматизации работы летного экипажа может координировать совместную работу с другими летательными аппаратами для обеспечения дозаправки и выполнения необходимых для этого карт контрольных проверок (например, для обеспечения точных позиции, воздушной скорости летательных аппаратов, открытия крышки топливного бака и т.п.).
[116] Когда пилот выбирает закладку 328 маршрута, человеко-машинный интерфейс 126 может отображать карту 326 района со значком 322, представляющим текущее местоположение летательного аппарата по траектории полета относительно его различных путевых точек 320. Выбор (например, похлопыванием, щелчком и т.п.) значка 322 вызывает выдачу на дисплее диалогового окна 324, в котором выводятся различные рабочие условия летательного аппарата (например, идентификацию, высоту, скорость, курс и т.п.). Карта 326 района может быть сохранена, экспортирована, повернута или панорамирована с использованием окна 318 управления картой. Карта 326 района может быть сохранена или экспортирована (например, посредством системы 122 связи) в виде статического изображения или набора данных (или базы данных). Когда пилот выбирает закладку 332 калибровки, человеко-машинный интерфейс 126 может отображать калибровку летательного аппарата, при этом пилот может иметь возможность последующего ее пересмотра. Карта 326 района может быть выполнена с возможностью отображения одного или более маршрутов 352, вырабатываемых маршрутным устройством 160 управления, в том числе первоначального маршрута 352а и, где применимо, маршрута 352b полета, обеспечивающего уклонение от препятствий, (или другое отклонение) для уклонения от препятствия 344.
[117] Система 104 на основе человеко-машинного интерфейса может обеспечивать интуитивно понятный дисплей и интерфейс, который обеспечивает верификацию карт контрольных проверок и выдачу предупреждения в отношении исправности от базовой платформы 102 и прогнозирование состояния летательного аппарата (например, потребления топлива и прогнозируемой оставшейся дальности полета), а также прогнозирование сбоев и предупреждения об отклонениях (например, "температура выходящих газов левого двигателя на 5 градусов выше нормы и растет" и "обнаружено неминуемое столкновение с не отвечающим на запросы объектом"). Таким образом, когда пилот выбирает закладку 330 процедур, как показано на ФИГ. 3b, он может просматривать и контролировать выполнение пунктов карты контрольных проверок, а также просматривать какие-либо предупреждения в отношении исправности. По существу, работа системы 104 на основе человеко-машинного интерфейса заключается в упрощении контроля и/или выполнения карт контрольных проверок с отметкой пунктов как выполненных, когда система 106 восприятия воспринимает информацию об их выполнении и выдает предупреждения пилоту, когда пункты не выполнены, на основании информации, ранее импортированной, например, из руководства по летной эксплуатации. Система 100 автоматизации работы летного экипажа также контролирует исправность систем, сравнивая текущее состояние системы с предполагаемым на основании Руководства по летной эксплуатации и других источников знаний, и управляет соответствующим реагированием на нештатные ситуации. В некоторых аспектах либо пилот, либо базовая платформа 102 может подтверждать выполнение действий по карте контрольных проверок, и, система 104 на основе человеко-машинного интерфейса автоматически переходит к правильной карте контрольных проверок, если это необходимо. Система 104 на основе человеко-машинного интерфейса может выдавать визуальные и звуковые сигналы тревоги для привлечения внимания пилота к пропущенным пунктам карты контрольных проверок, приборам, которые показывают значения, выходящие за пределы нормы, или прогнозируемым событиям по мере выполнения летательным аппаратом плана полета, который может быть введен в виде последовательности путевых точек (например). Например, как показано на чертежах, список задач может быть представлен вместе с индикаторами, которые показывают, завершено ли выполнение задачи, выполняется ли она в настоящий момент или ее необходимо выполнить (например, значок "отметка о проверке" включает значение "выполнение завершено", значок "выполнятся в настоящий момент" и значок "необходимо выполнить"). Схожим образом может быть предоставлен список опасностей для здоровья вместе с одним или соответствующими значками для обозначения одного или более рабочих условий, выходящих за пределы допустимого диапазона. Например, если топлива недостаточно, вместе со значком недостаточного количества топлива может использоваться индикатор недостаточного количества топлива.
[118] Выбор значка приложения 336 контроля полезной нагрузки, выполненной в виде датчика, вызывает отображение человеко-машинным интерфейсом 126 домашнего экрана 338 для обнаружения препятствий, такого как приводимый в качестве примера домашний экран 338 для обнаружения препятствий, показанный на ФИГ. 3c. Домашний экран 338 для обнаружения препятствий может отображать множество окон состояния/предупреждений, включая, помимо прочего, окно 338а состояния доступных датчиков, окно 338b предупреждений обнаружения/уклонения и окно 338с определения местоположения препятствий.
[119] Окно 338а состояния доступных датчиков может отображать, помимо прочего, список различных доступных датчиков, соединенных с полезной нагрузкой 162, выполненной в виде датчика обнаружения препятствий. Состояние (например, работа, неисправность, необходимость технического обслуживания, калибровки и т.д.) может быть представлено рядом с наименованием и/или значком соответствующего датчика. Окно 338b предупреждений обнаружения/уклонения может отображать одно или более предупреждений на основании по меньшей мере частично данных от полезной нагрузки 162, выполненной в виде датчика обнаружения препятствий. Предупреждения могут обеспечивать информацию относительно любых препятствий (например, отвечающих и не отвечающих на запросы препятствий) в пределах поля обзора летательного аппарата, включая наличие и местоположение любых обнаруженных препятствий. Предупреждения могут быть автоматически организованы в соответствии с их относительной важностью друг для друга. С этой целью, каждому типу предупреждения может быть назначен вес (или ранг) таким образом, что предупреждения перечислены и отсортированы по иерархии. Например, непосредственные угрозы (например, непосредственная угроза столкновения - такая как препятствие в пределах заданного расстояния 342а) могут быть перечислены первыми, за ними следуют угрозы средней степени (например, препятствие за пределами заданного расстояния 342а, но в пределах второго заданного расстояния 342b) и, наконец, общие предупреждения о состоянии (например, препятствия в поле обзора летательного аппарата). В некоторых аспектах угрозы могут быть закодированы цветом таким образом, что непосредственные угрозы имеют первый цвет (например, красный, который может сопровождаться звуковым сигналом), угрозы средней степени имеют второй цвет (например, желтый), а общие предупреждения о состоянии имеют третий цвет (например, зеленый, черный и т.д.). Окно 338c определения местоположения препятствий может обеспечивать графическое представление 340 предупреждений (и другой информации), обеспечиваемое окном 338b предупреждений обнаружения/уклонения. Посредством человеко-машинного интерфейса 126 оператор может выбрать графическое представление 340 для увеличения окна 338c определения местоположения препятствий и/или графического представления 340, пример которого показан на ФИГ. 3d.
[120] Со ссылкой на ФИГ. 3d, окно 338c определения местоположения препятствий может быть увеличено для подробного отображения графического представления 340. Например, графическое представление 340 может отображать все препятствия 344, обнаруженные (например, полезной нагрузкой 162 в виде датчика обнаружения препятствий) в пределах поля обзора 342c летательного аппарата 346. Препятствия 344 могут быть, например, отвечающими на запросы препятствиями (например, отвечающими на запросы летательными аппаратами) или не отвечающими на запросы препятствиями (например, не отвечающим на запросы летательными аппаратами и другими летающими объектами, такими как птицы). На основании по меньшей мере информации о сближении (в понятиях вертикального/высоты и горизонтального расстояния) препятствия с летательным аппаратом 346, каждое из препятствий 344 в пределах поля обзора 342c может быть показано как одно из препятствия 344а, представляющего непосредственную угрозу, препятствия 344b, представляющего угрозу средней степени, и/или препятствия 344с, не представляющего угрозы. Например, препятствие 344 может быть идентифицировано как препятствие 344а, представляющее непосредственную угрозу, если оно находится в пределах заданного расстояния 342а от летательного аппарата 346, тогда как препятствие 344 может быть идентифицировано как препятствие 344b, представляющее угрозу средней степени, если оно находится вне пределов заданного расстояния 342а от летательного аппарата 346, но в пределах второго заданного расстояния 342b. Препятствия 342, находящиеся в поле обзора 342c, но не в пределах второго заданного расстояния 342b (или на достаточно отличающейся высоте от летательного аппарата 346), может быть идентифицировано как препятствие 344с, не представляющее угрозы. Хотя графическое представление 340 по ФИГ. 3d в целом показано как сближение в двумерных понятиях (например, в плоскости X-Y, определяемой осью X и осью Y), графическое представление 340 может быть показано похожим на трехмерное изображение (ось X, ось Y и ось Z), чтобы лучше показать препятствия 344, обнаруженные вблизи летательного аппарата 346, пример которого показан на ФИГ. 3е. Для переключения между двух- и трехмерными представлениями оператор может выбрать (например, похлопать, чтобы переключить) значок 348 "2D/3D". В трехмерном представлении оператор также может выполнить панорамирование и/или поворот графического представления 340 с использованием значка 350 панорамирования/поворота или простым подключением графического представления 340 посредством движения похлопывания и перетаскивания до тех пор, пока оператор не получит необходимый вид. В некоторых аспектах любые "мертвые" зоны, т.е. воздушное пространство, которое не контролируется датчиками), могут быть показаны как затененные, чтобы указать оператору на возможность существования препятствий в затененной области воздушного пространства.
[121] Помимо информации о сближении графическое представление 340 может обеспечивать представление различных рабочих условий препятствий 344. Например, графическое представление 340 может отображать, для каждого обнаруженного препятствия 344, помимо прочего, идентификацию (например, хвостовой номер, если известно), высоту, скорость, курс, состояние (например, отвечающий на запросы или не отвечающий на запросы) и т.д. Рабочие условия также могут использоваться в качестве фактора определения состояния угрозы для летательного аппарата 346 для данного препятствия 344. Например, базовая платформа 102 может определять (на основании по меньшей мере частично данных от полезной нагрузки 162 в виде датчика обнаружения препятствий), что препятствие 344, которое должно быть препятствием 344c, не представляющим угрозы на основании текущего местоположения, может стать препятствием 344а, представляющим непосредственную угрозу, (или препятствием 344b, представляющим угрозу средней степени) на основании скорости и/или курса препятствия 344с, не представляющего угрозы, в течение заданного периода времени (например, небольшого периода времени, например, от 1 до 10 минут или около 1 минуты). В таком случае, базовая платформа 102 может, в случае необходимости, повышать ранг препятствия 344 с препятствия 344с, не представляющего угрозы, до препятствия 344а, представляющего непосредственную угрозу, (или препятствия 344b, представляющего угрозу средней степени), независимо от настоящего местоположения препятствия 344 возле летательного аппарата 346.
[122] Распределение задач.
Система 104 на основе человеко-машинного интерфейса может обеспечивать для пилота возможность ограничения действий, исполняемых системой 100 автоматизации работы летного экипажа, при наличии таковых. Система 104 на основе человеко-машинного интерфейса может определять распределение задач между пилотом и системой 100 автоматизации работы летного экипажа, их обязанности и осуществлять передачу информации между ними с функционированием в качестве коллаборативного робота-помощника пилота. Таким образом, система 100 автоматизации работы летного экипажа может функционировать в зависимости от конфигурации в чисто консультативной роли (т.е. управления летательным аппаратом), полностью автономной роли (т.е. с управлением органами управления полетом без вмешательства пилота) или консультативной роли с возможностью управления полетными контроллерами. Система 104 на основе человеко-машинного интерфейса также может быть выполнена так, чтобы позволить пилоту пройти фазу перехода, на которой пилот определяет аспекты полетной операции, за которые ответственна система 100 автоматизации работы летного экипажа. Например, система 104 на основе человеко-машинного интерфейса может отображать список задач, в котором пилот может выбрать, кто несет ответственность за данную задачу в списке - система 100 автоматизации работы летного экипажа или пилот. Список задач может быть представлен в систему 104 на основе человеко-машинного интерфейса из редактора процедур, который описан ниже. После заполнения структуры 208 данных летательного аппарата и ее уточнения, в результате чего пилот больше доверяет системе 100 автоматизации работы летного экипажа, пилот может позволить системе 100 автоматизации работы летного экипажа выполнение дополнительных действий, при этом пилот осуществляет переход из основного режима в режим контрольного наблюдения (т.е. полностью автономный режим). В этом режиме контрольного наблюдения взаимодействия пилота могут происходить на высоком, целеориентированном уровне, на котором система 104 на основе человеко-машинного интерфейса поддерживает выполнение этих задач, а также позволяет оператору понять другие уровни для устранения неполадок. Как отмечено выше, в некоторых аспектах все задачи могут выполняться пилотом, а системе 100 автоматизации работы летного экипажа остается вспомогательная роль.
[123] Осведомленность о режиме работы.
Существует риск того, что при использовании какой-либо системы автоматизации пилот может перепутать режимы работы (например, когда пилот не сосредотачивается на задаче, т.к. полагает, что ее выполнением будет заниматься система автоматизации). Система 104 на основе человеко-машинного интерфейса позволяет избежать такой путаницы режимов за счет выработки правильной функции и вышеописанного распределения задач между системой 100 автоматизации работы летного экипажа и пилота. По существу, система 104 на основе человеко-машинного интерфейса обеспечивает пилоту возможность непосредственно выдавать команды и задавать конфигурацию системы 100 автоматизации работы летного экипажа посредством человеко-машинного интерфейса 126 и отображает информацию, необходимую для понимания пилотом, какие действия берет на себя система 100 автоматизации работы летного экипажа, для обеспечения осведомленности о режиме работы. Иными словами, осведомленность о режиме работы в целом относится к состоянию, при котором режим системы соответствует ожидаемому оператором режиму работы. Человеко-машинный интерфейс 126 может отображать информацию, необходимую для обеспечения того, чтобы пилот всегда знал, в каком режиме функционирует система 100 автоматизации работы летного экипажа. Кроме того, система 104 на основе человеко-машинного интерфейса обеспечивает взаимодействие с человеком для приложений при выполнении отдельных заданий (например, оперативных приложений 202).
[124] Система 112 контроля состояния летательного аппарата.
Система 112 контроля состояния летательного аппарата собирает, определяет или иным образом воспринимает состояние летательного аппарата в реальном времени. Как отмечено выше, система 112 контроля состояния летательного аппарата может воспринимать состояние летательного аппарата в реальном времени посредством, помимо прочего, прямого соединения (например, встраивания в летательный аппарат или какого-либо проводного соединения с ним) с летательным аппаратом или посредством системы 106 восприятия. Система 112 контроля состояния летательного аппарата также может быть соединена с полезной нагрузкой 162, выполненной в виде датчика обнаружения препятствий, прямо или через базовую платформу 102, для получения информации, отображающей любые препятствия 344 в воздушном пространстве возле летательного аппарата.
[125] Когда используется система 106 восприятия, система 112 контроля состояния летательного аппарата может включать в себя выделенный контроллер (например, процессор) или совместно использовать контроллер 402 системы 106 восприятия. Система 106 восприятия, например, может использовать сочетание системы технического зрения, акустической системы и идентификационных алгоритмов для считывания или уяснения информации о полетной ситуации, отображаемой приборами кабины. Приводимые в качестве примера приборы кабины включают в себя, например, высотомер, индикатор воздушной скорости, индикатор вертикальной скорости, одну или более курсовых систем (например, магнитный компас), одну или более гироскопических систем (например, указатель пространственного положения, индикатор курса, указатель поворота), одну или более систем на основе пилотажных командных приборов, одну или более навигационных систем (например, всенаправленный курсовой радиомаяк, работающий на очень высоких частотах, ненаправленный радиомаяк) и т.п. Система 106 восприятия может включать в себя процессор и один или более оптических датчиков (например, три или более легких камер видеонаблюдения), последовательно установленных на приборной панели, чтобы максимизировать плотность пикселей, устойчивость к бликам и для резервирования. Указанные один или более оптических датчиков могут быть подсоединены к компьютеру восприятия по проводам, например, через сеть Ethernet. Указанные один или более оптических датчиков должны быть установлены на линии прямой видимости до приборной панели с уменьшением загораживания обзора пилоту.
[126] Данные о полетной ситуации, воспринимаемые системой 106 восприятия и/или системой 112 контроля состояния летательного аппарата, могут кодироваться и передаваться в базовую платформу 102 в режиме реального времени. Открытая архитектура базовой платформы 102 обеспечивает возможность включения в нее дополнительных данных, принимаемых посредством шины 124 данных, для дополнения данных о полетной ситуации, вырабатываемых системой 106 восприятия или полезной нагрузки 162 в виде датчика обнаружения препятствий. Как показано на ФИГ. 1b, например, система 112 контроля состояния летательного аппарата и/или система 106 восприятия могут принимать команды и данные конфигурации от базовой платформы 102, с отправкой в базовую платформу 102 информации о состоянии и полетной ситуации (например, данных о полетной ситуации), собираемой системой 106 восприятия или иным образом собранной системой 112 контроля состояния летательного аппарата.
[127] На ФИГ. 4 показана приводимая в качестве примера система 106 восприятия, функционально соединяемая, помимо прочего, с базовой платформой 102 (которая соединена с другими подсистемами, такими как система 116 управления полетом), инерциально-спутниковой (GPS) навигационной системой 154 и полезной нагрузкой 162 в виде датчика обнаружения препятствий. Система 106 восприятия осуществляет визуальный и/или акустический контроль, помимо прочего, приборов кабины с выработкой данных о полетной ситуации, которые могут быть использованы для получения информации о состоянии летательного аппарата исходя из компоновки кабины летательного аппарата, в которой может использоваться разное оборудование от базовых аналоговых приборов до комплектов высокоинтегрированного авиационного электронного оборудования для кабин с экранной индикацией. Помимо получения информации о физическом состоянии, такой как воздушная скорость и высота, система 106 восприятия также может контролировать приборы, показывающие работу систем летательного аппарата, такие как указатели уровня топлива и средства радиосвязи, и обеспечивать дополнительную обратную связь о состоянии и положении органов системы 108 исполнительных механизмов.
[128] Как показано на чертежах, система 106 восприятия может содержать контроллер 402 восприятия, функционально соединяемый с базой 404 данных, и множество датчиков, таких как камеры 410, (используемых для системы технического зрения), микрофон 408 (используемый для акустической системы) и/или другие датчики 406 (например, датчики температуры, датчики положения, инерционные датчики и т.п.). Контроллер 402 восприятия может представлять собой, например, процессор, выполненный с возможностью передачи данных о полетной ситуации (или выдачи иных инструкций) в базовую платформу 102 на основании принятой информации и обработанной информации, принятой от указанного множества датчиков, базы 404 данных и внешних компонентов, таких как инерциально-спутниковая (GPS) навигационная система 154 и полезная нагрузка 162 в виде датчика обнаружения препятствий.
[129] Система технического зрения.
Система 106 восприятия может использовать монокулярную или стереоскопическую систему технического зрения с возможным включением в нее маркеров захвата движения для непрерывного контроля состояния летательного аппарата посредством считывания того, что отображено на приборах кабины. В некоторых аспектах посредством сравнения информации о сцене с двух точек расположения камеры может быть извлечена трехмерная информация путем изучения относительных положений препятствий на двух панелях. Система технического зрения может быть использована для точного контроля приборов (например, стеклянных указательных приборов, физических манометров и т.п.) и переключателей, а также их положений в условиях различной освещенности и компоновок и размеров кабины. Использование стереоскопической системы технического зрения и/или маркеров также обеспечивает реализацию чувственного восприятия для предотвращения столкновений между какими-либо роботизированными компонентами и пилотом.
[130] Система технического зрения может использовать комплект стереокамер высокой четкости и/или сканирующий лидар. Система может быть выполнена с возможностью распознавания данных от всех полетных приборов и получения информации о состоянии кремальер, переключателей и контрольно-измерительных приборов, которые отображают состояние конкретных систем летательного аппарата (например, остаток топлива). Она также может быть выполнена с возможностью распознавания состояния панели с достаточным разрешением для обнаружения незначительных изменений, которые возникают в результате действий пилота. Алгоритмы машинного зрения в компьютере системы 106 восприятия 'производят считывание' приборов (контрольно-измерительных приборов, огней, панели поправки на угол ветра, отдельных элементов основного полетного табло или полетного табло комплексной сигнализации в кабине с экранной индикацией) и механических элементов, таких как рычаги управления двигателем, элементы продольной балансировки, переключатели и автоматы защиты сети, для выдачи в реальном времени в базовую платформу 102 информации об обновлении состояния кабины.
[131] Система 106 восприятия может быть выполнена с возможностью получения информации о состоянии летательного аппарата исходя из компоновок кабины летательного аппарата, в которой может использоваться разное оборудование от базовых аналоговых приборов до комплектов высокоинтегрированного авиационного электронного оборудования для кабин с экранной индикацией. Благодаря системе технического зрения устраняется необходимость в обязательной выдаче данных с летательного аппарата, что обеспечивает/увеличивает транспортабельность оборудования внутри летательного аппарата. Однако, когда возможно, система 100 автоматизации работы летного экипажа также может быть соединена с источником данных летательного аппарата (например, через порт данных). Кроме того, используя подход, основанный на приложениях, описанный для базовой платформы 102, различные компоновки кабины могут быть рассмотрены и уяснены с использованием различных базовых оперативных приложений 202. Например, система 100 автоматизации работы летного экипажа может использовать приложение 314 контрольно-измерительных приборов для извлечения значений, отображаемых на приборах, будь то на графической круговой шкале (например, механическом аналоговом указателе или его цифровых представлениях) или кабине с экранной индикацией. Такой подход также обеспечивает возможность запуска системой 100 автоматизации работы летного экипажа оперативных приложений, которые контролируют, помимо прочего, метеорологические радиолокационные станции, системы отображения воздушного движения и карты местности, отображаемые в кабине.
[132] Для обеспечения транспортабельности системы 100 автоматизации работы летного экипажа процесс быстрого изучения новой компоновки кабины и кодирования небольших различий в местоположении и масштабировании или блоках приборов обеспечивается конструкцией системы 106 восприятия. Например, во время фазы первоначального накопления знаний местоположение и шкалы приборов и переключателей могут быть закодированы и подтверждены для конкретного летательного аппарата, что сокращает срок выполняемой в реальном времени задачи по извлечению позиции, отображаемой графической круговой шкалой (круговой шкалой) или отображаемой численно (в кабине с экранной индикацией), например, на контрольно-измерительных приборах в виде графической круговой шкалы, дисплее на электронно-лучевой трубке, жидкокристаллическом дисплее и т.п. Кусочно-плоская структура приборной панели кабины позволяет системе 106 восприятия интерпретировать изображения (например, с использованием методов томографии) и регистрировать их с сопоставлением с данными предварительно составленных карт, получаемыми во время фазы первоначального накопления знаний. Соответственно, изображения прямой передачи могут регистрироваться и сравниваться с ранее аннотированной моделью, что значительно упрощает интерпретацию данных.
[133] Система 108 исполнительных механизмов.
При необходимости система 108 исполнительных механизмов выполняет действия, команды на выполнение которых она получила посредством базовой платформы 102, для управления полетом и в целом работой летательного аппарата. Система 108 исполнительных механизмов системы 100 автоматизации работы летного экипажа выполняет действия, команды на выполнение которых она получила от базовой платформы 102, для управления полетом и в целом работой летательного аппарата без вмешательства в действия, выполняемые пилотом. Как показано на ФИГ. 1b, например, система 108 исполнительных механизмов может принимать команды приведения в действие и данные конфигурации от базовой платформы 102 с отправкой при этом в базовую платформу 102 информации о состоянии и реагировании, вырабатываемой системой 108 исполнительных механизмов.
[134] Кабины пилотируемых летательных аппаратов рассчитаны так, чтобы человек мог достать до того, что ему нужно, и поэтому все органы управления в кабине выполнены доступными для роботизированного/механического манипулятора сопоставимого размера. Однако манипулятор, которым можно привести в действие каждые отдельные выключатель, кремальеру, рычаг и кнопку в любой возможной кабине в условиях больших перегрузок и вибрации с быстрым выполнением действия, необходимым для аварийного режима, может оказаться дорогим, тяжелым и требовать вскрытия большего количества блоков, чем желательно для системы 100 автоматизации работы летного экипажа.
[135] Чтобы более эффективно обеспечить транспортабельность внутри летательного аппарата, в системе 100 автоматизации работы летного экипажа приведение в действие основных органов управления полетом (ручки/колонки, ручки, боковой ручки управления или совместно, педалей управления рулем направления, тормозами и газом) может быть отделено от приведения в действие вспомогательных органов управления полетом (например, переключателей, кремальер, клавишных выключателей, предохранителей и т.п.). Такой подход уменьшает вероятность выработки односторонних решений, использование которых становится устаревшим по мере развития летательных аппаратов. Таким образом, система 100 автоматизации работы летного экипажа может использовать систему 108а основных исполнительных механизмов и систему 108b вспомогательных исполнительных механизмов для физического управления исполнительными механизмами в кабине. В частности, система 108а основных исполнительных механизмов может приводить в действие основные органы управления полетом, а система 108b вспомогательных исполнительных механизмов может приводить в действие вспомогательные органы управления полетом, не мешая пилоту использовать эти органы управления. Система 108а основных исполнительных механизмов и система 108b вспомогательных исполнительных механизмов выполнены с возможностью совместного приведения в действие всех стандартных органов управления, находящихся в известных кабинах экипажа, во время выполнения полетных операций.
[136] Как раскрыто ниже, система 108а основных исполнительных механизмов сфокусирована на приведении в действие основных органов управления полетом (ручки/колонки управления, ручки, боковой ручки или совместно, педалей управления рулем направления, тормозами и газом), а система 108b вспомогательных исполнительных механизмов сфокусирована на приведении в действие органов управления, до которых системе 108а основных исполнительных механизмов сложно добраться, таких как вспомогательные органы управления полетом (например, переключатели, кремальеры, клавишные выключатели, предохранители и т.п.).
[137] Система 108а основных исполнительных механизмов.
Система 108а основных исполнительных механизмов сфокусирована на наборе органов управления, необходимых для безопасного управления летательным аппаратом. Как показано на ФИГ. 5а и 5b, система 108а основных исполнительных механизмов включает в себя раму 516, имеющую шарнирную руку 502 (например, роботизированную конечность или "руку") и исполнительный механизм 510 ручки/колонки управления, который приводит в действие основные органы управления полетом (колонку, ручку, боковую ручку управления или совместно, педали управления рулем направления, тормозами и газом) и другие легкодоступные органы управления. Исполнительные механизмы могут представлять собой одно или более из линейных (действующих по прямой линии), вращающихся (действующих по круговой траектории) или колебательных исполнительных механизмов, которые могут приводиться в действие посредством одного или более из электрических, пневматических и/или гидравлических способов.
[138] Размер и форма рамы 516 могут обеспечивать возможность ее размещения в пределах сидения стандартного летательного аппарата. Для этого площадь основания рамы 516 должна быть приблизительно равна площади, занимаемой средним человеком, находящимся в кресле, или меньше ее. Система 108 исполнительных механизмов может быть изготовлена с использованием легких металлов, металлических сплавов и/или композиционных материалов.
[139] Исполнительный механизм 510 ручки/колонки управления.
Исполнительный механизм 510 ручки/колонки управления может быть соединен и взаимодействовать с существующей ручкой/колонкой 514 управления летательного аппарата с использованием механизма 512 захвата ручки/колонки управления. Размер и форма механизма 512 захвата ручки/колонки управления являются такими, что он является универсальным и может взаимодействовать с ручками/колонками управления и/или штурвалами различных форм. Исполнительный механизм 510 ручки/колонки управления может быть выполнен с возможностью перемещения ручки/колонки 514 управления вперед, назад, влево, вправо и в промежуточные положения. Механизм 512 захвата ручки/колонки управления также может содержать один или более исполнительных механизмов для приведения в действие кнопок и/или переключателей, расположенных на ручке/колонке 514 управления.
[140] Шарнирная рука 502.
Размер, форма и конфигурация шарнирной руки 502, управляемой приводным механизмом, могут быть такими, что она занимает пространство, обычно занимаемое руками второго пилота, с обеспечением таким образом ее транспортабельности внутри летательного аппарата. Для обеспечения возможности перемещения с множеством степеней свободы шарнирная рука 502 может содержать множество звеньев руки (линейных, изогнутых или выполненных под углом), соединенных с использованием множества шарнирных или поворотных соединений 506. На своем дальнем конце шарнирная рука 502 может содержать механизм 504 захвата. Механизм 504 захвата может быть соединен с шарнирной рукой 502 посредством соединения с множеством степеней свободы. Основание шарнирной руки 502 может быть соединено с возможностью поворота и перемещения с рамой 516 посредством подвижного основания 508. Например, шарнирная рука 502 может быть соединена с верхним основанием 508а, которое соединено с возможностью перемещения с нижним основанием 508b, которое может быть прикреплено к раме 516. Верхнее основание 508а может перемещаться относительно нижнего основания 508b с использованием, например, сочетания направляющих и шаровых опор. В некоторых аспектах верхнее основание 508а может перемещаться относительно нижнего основания 508b вдоль как оси X, так и оси Y.
[141] Шарнирная рука 502 может быть оборудована кодирующим устройством (например, сдвоенные кодирующие устройства с разрешением 18 бит) для каждой из его степеней свободы для обеспечения точного позиционирования шарнирной руки 502. На каждом шарнирном или поворотном соединении 506 могут быть предусмотрены внутренние муфты, так что пилот при необходимости может пересилить шарнирную руку 502 без ее повреждения. В таком случае система 100 автоматизации работы летного экипажа может определять позицию или местоположение шарнирной руки 502 с использованием кодирующих устройств.
[142] Механизм 504 захвата может быть выполнен с возможностью соединения или иного взаимодействия, например, с рычагами управления двигателем и т.п. Механизм 504 захвата также может обеспечивать определение силы и давления, с тем чтобы позволить системе 100 автоматизации работы летного экипажа оценивать степень захвата исполнительным механизмом органа управления полетом, и регулировать движение для правильного его отбрасывания. После выполнения указанного движения эта же обратная связь может быть использована для определения, была ли получена ли необходимая конфигурация выключателя. В некоторых аспектах шарнирная рука 502 может быть оснащена электронным устройством (например, следящим устройством), которое позволяет ей находить препятствие и вести его.
[143] Система 108b вспомогательных исполнительных механизмов.
В отличите от основных органов управления полетом, которые в разных модификациях и типах летательных аппаратов в целом размещены в одной и той же области, местоположение вспомогательных органов управления полетом (например, органов авиационного электронного оборудования, переключателей, кремальер, клавишных выключателей, тумблеров, закрытых переключателей, предохранителей и т.п.) не является таким систематическим или пространственно сосредоточенным для разных летательных аппаратов.
[144] Система 108b вспомогательных исполнительных механизмов сфокусирована на приведении в действие органов управления, до которых системе 108а основных исполнительных механизмов сложно добраться. Например, некоторые переключатели могут даже находиться на верхней панели непосредственно над головой командира корабля, что может затруднить манипулирование ими с помощью роботизированной руки (особенно при полете в условиях турбулентности). Соответственно, некоторые исполнительные механизмы могут быть назначены для работы с вышеописанной системой 108а основных исполнительных механизмов, в то время как другие могут быть назначены для работы с системой 108b встроенных вспомогательных исполнительных механизмов.
[145] Система 108b вспомогательных исполнительных механизмов может быть выполнена в виде перестраиваемого двухкоординатного плоттера или перестраиваемой портальной системы, установленного или установленной непосредственно на необходимой панели и откалиброванного или откалиброванной под конкретную панель, с которой он или она работает. Система 108b вспомогательных исполнительных механизмов предпочтительно выполнена универсальной и изменяемого размера. На ФИГ. 5 с показан приводимый в качестве примера двухкоординатный плоттер. Двухкоординатный плоттер может содержать квадратную раму, которая служит в качестве направляющих 520 плоттера, поворотный многофункциональный инструмент 528 с множеством интерфейсов (например, исполнительного механизма 532 переключателя и исполнительного механизма 530 кремальеры), выполненных с возможностью манипулирования необходимыми органами управления, и систему управления, которая перемещает этот многофункциональный инструмент 526 в пределах рамы по набору направляющих 522, проходящих по оси Y, и по набору направляющих 524, проходящих по оси X.
[146] Во время использования плоттер перемещает многофункциональный инструмент 528 в указанное местоположение, выбирает нужный интерфейс для манипулятора и манипулирует необходимыми вспомогательными органами управления полетом. Например, многофункциональный инструмент 528, который может переключать двухпозиционные переключатели и/или откидывать крышку закрытых переключателей с использованием исполнительного механизма 532 переключателя и может поворачивать кремальеры с использованием исполнительного механизма 530 кремальеры. Исполнительный механизм 532 переключателя и/или исполнительный механизм 530 кремальеры могут быть соединены с многофункциональным инструментом 528 посредством шарнирного или вращающегося элемента, такого как поворотная рука 534 переключателя.
[147] При неиспользовании многофункциональный инструмент 526 может быть возвращен в исходное положение (например, автоматически перейти в дальний угол), чтобы не мешать доступу к панели. Многофункциональный инструмент 526 может быть оснащен датчиками (например, датчиками приближения), так что он может уйти с пути при обнаружении руки пилота. Во время первоначальной настройки плоттера на новом летательном аппарате может быть произведено кодирование местоположения, типа и позиции вспомогательной панели управления полетом. После кодирования вспомогательной панели управления полетом конфигурация может быть сохранена в структуре 208 данных летательного аппарата и загружена при установке системы 100 автоматизации работы летного экипажа в тот же самый летательный аппарат или летательный аппарат такого же типа. В некоторых аспектах могут быть предусмотрены дополнительные исполнительные механизмы для приведения в действие контроллеров, которые расположены, например, в углублении для ног в полу кабины, такие как педали (например, педали тормоза и/или управления рулем направления).
[148] Полезная нагрузка 162 в виде датчика обнаружения препятствий.
Полезная нагрузка 162 в виде датчика обнаружения препятствий может использовать множество датчиков для определения и контроля препятствий, внешних по отношению к летательному аппарату. В одном варианте осуществления, полезная нагрузка 162 в виде датчика обнаружения препятствий может быть прямо соединена с базовой платформой 102 или через другую систему, такую как система 112 контроля состояния летательного аппарата, система 116 управления полетом или существующие системы летательного аппарата. Полезная нагрузка 162 в виде датчика обнаружения препятствий или ее компоненты также могут быть выполнены с возможностью беспроводного сообщения с другими системами летательного аппарата или системой 100 автоматизации работы летного экипажа. Как показано на ФИГ. 1b, например, полезная нагрузка 162 в виде датчика обнаружения препятствий может принимать команды и данные конфигурации от базовой платформы 102 с отправкой в базовую платформу 102 информации о препятствии, касающейся любых отвечающих и не отвечающих на запросы препятствий и собранной полезной нагрузкой 162, выполненной в виде датчика обнаружения препятствий.
[149] Как отмечено выше, полезная нагрузка 162 в виде датчика обнаружения препятствий функционально может быть соединена с базовой платформой 102 для обеспечения выработки маршрутным устройством 160 управления системы 100 автоматизации работы летного экипажа маршрута полета, обеспечивающего уклонение от препятствий, с тем чтобы уклониться от одного или более препятствий, обнаруженных полезной нагрузкой 162, выполненной в виде датчика обнаружения препятствий, например, на основании по меньшей мере частично информации о препятствии. Кроме того, полезная нагрузка 162 в виде датчика обнаружения препятствий может передавать собранную информацию о препятствии в систему 112 контроля состояния летательного аппарата для предупреждения оператора (например, посредством человеко-машинного интерфейса 126) о возможном столкновении, положении препятствия или других его параметрах. В одном аспекте полезная нагрузка 162 в виде датчика обнаружения препятствий может использовать как радиолокационный датчик 412, так и камеру (например, инфракрасную камеру 414 - камеру с инфракрасным датчиком, электрооптическим датчиком 416, работающим в видимой и ближней инфракрасной области спектра, или другими оптическими датчиками 418) для контроля воздушного пространства возле летательного аппарата для обнаружения отвечающих и не отвечающих на запросы препятствий в пределах его поля обзора вдоль его траектории и т.д.
[150] Полезная нагрузка 162 в виде датчика обнаружения препятствий объединяет множество методов регистрации в единый пакет для отслеживания как отвечающих на запросы, так и не отвечающих на запросы целей, реализует последние алгоритмы уклонения от препятствий и определяет открытую архитектуру, благодаря чему обеспечивается возможность простого встраивания в нее будущих методов регистрации или алгоритмов уклонения от препятствий. Полезная нагрузка 162 в виде датчика обнаружения препятствий использует множество методов регистрации по электромагнитному спектру для определения соответствующей информации относительно не отвечающих на запросы целей в воздушном пространстве. Полезная нагрузка 162 в виде датчика обнаружения препятствий использует множество датчиков для регистрации не отвечающих на запросы целей, в том числе радиолокационный датчик 412, который сканирует воздушное пространство для поиска объектов (например, металлических объектов), датчик 414 длинноволнового инфракрасного (теплового) излучения, который сканирует воздушное пространство для получения тепловых сигнатур, и электрооптический датчик 416, работающий в видимой и ближней инфракрасной области спектра, который сканирует воздушное пространство для определения и способствования классифицированию объектов.
[151] Полезная нагрузка 162 в виде датчика обнаружения препятствий может способствовать работе пилота в качестве еще одного комплекта "глаз и ушей" для обеспечения внешнего восприятия, применимого ко всем формам летательных аппаратов. В одном варианте осуществления, например, полезная нагрузка 162 в виде датчика обнаружения препятствий обеспечивает для физического пилота (находящегося в воздухе в летательном аппарате или на земле) дополнительную осведомленность об обстановке. Еще в одном варианте осуществления полезная нагрузка в виде датчика обнаружения препятствий позволяет расширить сигналы управления, вводимые пилотом физически, и обеспечивает прямую интеграцию с системами дистанционного управления рулями с помощью электроприводов, что позволяет ему взять на себя управление летательным аппаратом во время сценариев потери связи. Таким образом, хотя полезная нагрузка 162 в виде датчика обнаружения препятствий раскрыта прежде всего в связи с системой 100 автоматизации работы летного экипажа, полезная нагрузка 162 в виде датчика обнаружения препятствий может быть обеспечена качестве дополнительной системы практически для любых летательных аппаратов (например, систем беспилотных летательных аппаратов Группы 2-3) для выполнения обнаружения и уклонения, что позволяет летательным аппаратам выполнять полет в пределах национального воздушного пространства.
[152] Радиолокационный датчик 412.
На ФИГ. 6а показаны приводимые в качестве примера радиолокационный датчик 412 и создаваемый им радиолокационный луч 600а. Радиолокационный датчик 412 может быть механически повернут для обеспечения поля обзора величиной 360 градусов. Радиолокационный датчик 412 может представлять собой, например, активную антенную решетку с электронным сканированием, пассивную антенную решетку с электронным сканированием, антенную решетку с электронным сканированием на основе метаматериалов, метеорологическую радиолокационную станцию или корабельную радиолокационную станцию. Для способствования использованию с небольшими летательным и аппаратами радиолокационный датчик 412 предпочтительно выполнен компактным, легким и с небольшими затратами. Подходящий радиолокационный датчик 412 включает в себя корабельные радиолокационные станции, такие как твердотельная доплеровская радиолокационная станция Furuno DRS4D-NXT, вес которой составляет 16 фунтов (7,3 кг), а размеры около 24 дюймов (61 см) в длину на 24 дюйма в ширину и на 9 дюймов (23 см) в высоту. Радиолокационная станция Furuno DRS4D-NXT обеспечивает поле обзора величиной 2° (V) × 25° (Н), регулируемую скорость вращения величиной 24, 36 и 48 оборотов в минуту и дальность действия до 36 миль.
[153] Радиолокационный датчик 412 может быть выполнен с возможностью контроля воздушного пространства возле летательного аппарата (например, кругового воздушного пространства вокруг летательного аппарата 700) как в отношении отвечающих на запросы препятствий, так и для не отвечающих на запросы препятствий. Как показано на чертежах, при нахождении в фиксированном положении радиолокационный датчик 412 обеспечивает относительно небольшую горизонтальную ширину (WГор.) луча при Y°, но при этом обеспечивает большую вертикальную ширину (WВерт.) луча при Z°, что приводит к получению радиального конуса воздушного пространства, контролируемого радиолокационной станцией. В частности, в зависимости от характеристик корабельной радиолокационной станции радиолокационный датчик 412 может обеспечивать поле обзора величиной 2° (Н) (например, Y°=2° из 360°) × 25° (V) (например, Z°=25° из 360°). Как можно понять, размеры радиолокационного луча 600а от радиолокационного датчика 412 увеличиваются в виде функции (например, линейной функции) расстояния от радиолокационного датчика 412 до препятствия. В частности, со ссылкой на ФИГ. 6а, размер сечения радиолокационного луча 600а на расстоянии Y 604 будет больше, чем размер сечения на расстоянии X 602. Например, если предположить, что поле обзора величиной 2° (Н) × 25° (V), размер сечения на расстоянии 6 миль от радиолокационного датчика 412, т.е. расстояние X=6 миль), может составлять в вокселях 2200 футов (671 м) (Н) × 14000 футов (4267 м) (V), а размер луча на расстоянии 36 миль (т.е. расстояние Y=36 миль) может составлять 13000 футов (3962 м) (Н) × 84000 футов (25603 м) (V). Следует отметить, что отношение размера луча в понятиях горизонтальной (Н) ширины к вертикальной (V) ширине остается по существу постоянным вдоль расстояния.
[154] Чтобы обеспечить больший охват, радиолокационный датчик 412 может быть выполнен с возможностью поворота с использованием механически вращающейся базовой конструкции. Например, механически вращающаяся базовая конструкция может соединяться с радиолокационным датчиком 412 через приводной вал для обеспечения механически вращающейся радиолокационной системы для сканирования воздушного пространства с радиальной диаграммой направленности вокруг летательного аппарата. Вращение радиолокационного датчика 412 обеспечивает полное покрытие 360° вокруг летательного аппарата (в плоскости X-Y) и азимутальное поле обзора величиной 25° (в плоскости X-Z). Радиолокационный датчик 412 может непрерывно вращаться с заданной скоростью вращения, например от 20 до 80 оборотов в минуту (RPM), более предпочтительно от 40 до 60 оборотов в минуту, наиболее предпочтительно 48 оборотов в минуту (например, 0,8 Гц). Хотя радиолокационный датчик 412 имеет плохое разрешение по сравнению с другими технологиями, существенным преимуществом радиолокационного датчика 412 является дальность его действия и относительно низкая стоимость.
[155] Радиолокационный датчик 412 может быть размещен в обтекателе или другой конструкции для защиты радиолокационного оборудования. Геометрическая форма обтекателя может быть аэродинамической для уменьшения лобового сопротивления при движении по воздуху. Обтекатель предпочтительно изготовлен из материала, прозрачного для радиоволн и предотвращает накопление загрязнений (например, льда, ледяного дождя, грязи, мусора и т.д.) непосредственно на радиолокационном оборудовании, например, на поверхности радиолокационных антенн. В случае вращающейся/поворотной радиолокационной параболической антенны обтекатель также защищает ее от мусора и прерывистого вращения вследствие ветра. В процессе эксплуатации радиолокационный датчик 412 может объединять собранные данные радиолокации с данными, собранными другими датчиками (или источниками данных), доступными для полезной нагрузки 162, выполненной в виде датчика обнаружения препятствий, для связи с базовой платформой 102.
[156] Камеры/оптические датчики.
Как отмечено выше, полезная нагрузка 162 в виде датчика обнаружения препятствий также использует один или более оптических датчиков (например, камер), выполненных с возможностью панорамирования и наклона, таких как инфракрасная камера 414 для сканирования воздушного пространства для получения тепловых сигнатур и электрооптический датчик 416, работающий в видимой и ближней инфракрасной области спектра, для сканирования воздушного пространства для определения и способствования классификации объектов. Таким образом, хотя в основном будет описана инфракрасная камера 414, другие оптические датчики 418 могут быть аналогичным образом использованы в дополнение к инфракрасной камере 414 или вместо нее, включая, помимо прочего, ультрафиолетовый, видимого света, ближней инфракрасной области спектра, коротковолнового инфракрасного излучения, инфракрасного излучения в среднем диапазоне, длинноволнового инфракрасного излучения, болометр, электрооптические камеры, лидар, проецирование света светодиодов, структурированный свет, многорежимная реконструкция и т.д.
[157] На ФИГ. 6b показаны приводимые в качестве примера инфракрасная камера 414 и инфракрасный луч 600b, создаваемый ею относительно радиолокационного луча 600а. Инфракрасная камера 414 может быть камерой длинноволнового инфракрасного излучения. Преимуществом инфракрасных камер 414 является их функция тепловизионного изображения. Для способствования использованию с небольшими летательными аппаратами инфракрасная камера 414, как и радиолокационный датчик 412, предпочтительно выполнена компактной, легкой и с небольшими затратами. Подходящая инфракрасная камера 414 включает в себя тепловизионную систему ночного видения FLIR M-612L, вес которой составляет 9 фунтов (4 кг), а размеры около 7 дюймов (17,8 см) в длину на 7 дюймов в ширину и на 12 дюймов (30,5 см) в высоту. Система FLIR M-612L обеспечивает использование микроболометрического датчика 640×480 VOx, фокусное расстояние 50 мм с полем обзора величиной 12° (Н) × 9° (V) (NTSC) и возможность масштабирования.
[158] Как и радиолокационный датчик 412 инфракрасная камера 414 может быть выполнена с возможностью контроля воздушного пространства вокруг летательного аппарата в отношении как отвечающих, так и не отвечающих на запросы препятствий, однако при более высоком разрешении и меньшей дальности действия. Как показано на чертежах, при нахождении в фиксированном положении инфракрасная камера 414 обеспечивает горизонтальную ширину (WГор.) луча при Y°, которая больше, чем вертикальная ширина (WВерт.) луча при Z°. В частности, в зависимости от характеристик инфракрасной камеры инфракрасная камера 414 может обеспечивать поле обзора величиной 12° (Н) (например, Y°=12° из 360°) × 9° (V) (например, Z°=9° из 360°), хотя доступны другие поля обзора, такие как 24° × 18°, 25° × 20° и т.д. Например, на основании поля обзора величиной 12° (Н) × 9° (V) размер сечения инфракрасного луча 600b на расстоянии 6 миль (например, расстояние X=6 миль) может составлять 7000 футов (2134 м) (Н) на 5200 футов (1585 м) (V). Размер сечения инфракрасного луча 600b увеличивается линейно в виде функции расстояния от инфракрасной камеры 414, однако разрешение уменьшается с расстоянием. Однако инфракрасная камера 414 обеспечивает значительно большее разрешение, чем радиолокационный датчик 412. Например, на расстоянии 6 миль инфракрасная камера 414 может обеспечить пиксельное покрытие 11 футов (3,35 м) × 11 футов (3,35 м) на пиксель, что приблизительно в 500 раз больше, чем разрешение радиолокационного датчика 412 на таком же расстоянии.
[159] По сравнению с радиолокационным лучом 600а на расстоянии X 602, инфракрасный луч 600b инфракрасной камеры 414 на расстоянии X 602 имеет приблизительно половинный размер вдоль вертикальной оси (оси Z). Чтобы компенсировать сужение поля обзора вдоль вертикальной оси, инфракрасная камера 414 может быть выполнена с возможностью панорамирования и наклона. Например, инфракрасная камера 414 может быть выполнена с возможностью наклона вверх и вниз (например, +/-90°) для увеличения вертикального поля обзора, а также выполнена с возможностью панорамирования влево (по левому борту) и вправо (по правому борту), т.е. поворота на 360° с обеспечением непрерывного панорамирования) для увеличения горизонтального поля обзора. Инфракрасная камера 414 может выполнять панорамирование непрерывно или ступенчато (например, ступенчато с фиксированными приращениями), при этом каждое приращение осуществляется на один радиальный сектор. В некоторых аспектах инфракрасная камера 414 может непрерывно выполнять панорамирование влево/вправо и наклоняться вверх/вниз для покрытия некоторых вокселов радиолокационного датчика 412 (например, 25° × 2°). По существу, инфракрасная камера 414 может обеспечивать измеримое поле обзора, равное или большее, чем поле обзора, определяемое Федеральное управление гражданской авиации США. Таким образом, хотя инфракрасная камера 414 имеет небольшую дальность действия и более узкое вертикальное поле обзора (например, что затрудняет обеспечение покрытия 360 градусов), преимуществом инфракрасной камеры 414 является ее высокое разрешение.
[160] Так же как радиолокационный датчик 412, инфракрасная камера 414 (или камера другого типа, в зависимости от случая употребления) может быть размещена в обтекателе или другой конструкции для защиты оборудования, выполненного в виде камеры, который или которая может включать в себя оптически прозрачные участки для способствования работе инфракрасной камеры 414. Радиолокационный датчик 412 и инфракрасная камера 414 могут находиться в одном обтекателе (например, одной гондоле для полезной нагрузки) или могут быть размещены в отдельных обтекателях, которые могут быть расположены в одном месте или размещены по отдельности на летательном аппарате. В процессе эксплуатации инфракрасная камера 414 может комбинировать данные, собираемые инфракрасной камерой, с данными, собираемыми другими датчиками (или источниками данных), доступными для полезной нагрузки 162, выполненной в виде датчика обнаружения препятствий, для связи с базовой платформой 102.
[161] В качестве иллюстрации, летательный аппарат, оснащенный полезной нагрузкой 162 в виде датчика обнаружения препятствий, может (1) обнаруживать не отвечающее на запросы препятствие на известном расстоянии и с известной скоростью с первым разрешением посредством радиолокационного датчика 412 и (2) получать изображение не отвечающего на запросы препятствия со вторым разрешением, т.е. более высоким разрешением) посредством камеры (например, инфракрасной камеры 414, электрооптического датчика 416, работающего в видимой и ближней инфракрасной области спектра, или других оптических датчиков 418). Процессор, в который встроена полезная нагрузкой 162 в виде датчика обнаружения препятствий или который является частью базовой платформы 102, может комбинировать информацию от радиолокационного датчика 412 и камеры для определения не отвечающего на запросы препятствия. Например, процессор может комбинировать радиолокационное сечение от радиолокационного датчика 412 с оптическим сечением от электрооптического датчика 416, работающего в видимой и ближней инфракрасной области спектра, и тепловым сечением от инфракрасной камеры 414.
[162] Как понятно специалистам в данной области техники, радиолокационное сечение в целом относится к измерению способности цели, т.е. не отвечающего на запросы препятствия) отражать радиолокационные сигналы в направлении радиолокационного датчика 412 (например, в полезной нагрузке 162, выполнено в виде датчика обнаружения препятствий). Другими словами, радиолокационное сечение обеспечивает меру отношения мощности обратного рассеяния на стерадиан (единичный телесный угол) в направлении радиолокационной станции (от цели) к плотности мощности, которая перехватывается целью. Соответственно, оптическое сечение относится к значению, которое описывает максимальное количество оптического потока, отраженного обратно к источнику, от не отвечающего на запросы препятствия, тогда как тепловое сечение отражает данные термографического измерения от инфракрасной камеры 414, описывающие не отвечающее на запросы препятствие. В некоторых аспектах полезная нагрузка 162 в виде датчика обнаружения препятствий может быть выполнена с возможностью определения не отвечающего на запросы препятствия с неполной информацией. Например, если только радиолокационный датчик 412 обнаруживает не отвечающее на запросы препятствие, процессор, соединенный с полезной нагрузкой 162, выполненной в виде датчика обнаружения препятствий, может выдать инструкции на летательный аппарат создать большую цилиндрическую зону уклонения, тогда как информация от камер может быть использована для ограничения зоны уклонения до небольшой сферической зоны уклонения.
[163] На ФИГ. 7 представлен перспективный вид примера летательного аппарата 700, имеющего фюзеляж 702, одну или более панелей 704 крыла (или другую поверхность управления полетом), хвостовое оперение 706, гондолу 708 для полезной нагрузки и один или более движителей 710 (например, реактивный двигатель, один или более воздушных винтов, приводимых в осевом направлении обычным двигателем или электрическим двигателем и т.д.). Полезная нагрузка 162 в виде датчика обнаружения препятствий может быть соединена с летательным аппаратом снаружи или изнутри в зависимости от типа датчика. Например, полезная нагрузка 162 в виде датчика обнаружения препятствий может быть выполнена внутри гондолы 708 для полезной нагрузки летательного аппарата 700. Хотя летательный аппарат 700 по ФИГ. 7 показан в виде летательного аппарата с фиксированным крылом, раскрытие объекта изобретения не ограничивается конкретной конфигурацией летательного аппарата и может быть применимо практически к любой конфигурации летательного аппарата, в том числе к многовинтовому летательному аппарату вертикального взлета и посадки.
[164] В гондоле 708 для полезной нагрузки, в которой может быть размещена, помимо прочего, полезная нагрузка 162, выполненная в виде датчика обнаружения препятствий, или ее части, могут быть соединены с возможностью поворота и вращения с фюзеляжем 702 (или другими конструктивными компонентами) посредством карданной системы. Например, гондола 708 для полезной нагрузки может быть соединена с передним концом фюзеляжа 702, чтобы обеспечить возможность более простого ориентирования гондолы 708 для полезной нагрузки вперед для контроля наличия препятствий вдоль траектории или пути полета летательного аппарата 700. Полезная нагрузка 162 в виде датчика обнаружения препятствий может быть соединена с летательным аппаратом 700 без необходимости во вскрытии блоков для обеспечения простоты съема и/или переустановки на другой летательный аппарат. В качестве альтернативы полезная нагрузка 162 в виде датчика обнаружения препятствий может быть установлена во время изготовления летательного аппарата 700, и, таким образом, полезная нагрузка 162 в виде датчика обнаружения препятствий может быть постоянно закреплена на летательном аппарате 700 или встроена в него. Один или более движителей 710 могут быть размещены, например, на фюзеляже 702 (например, конфигурация с толкательным устройством, как показано на чертежах), на панелях 704 крыла или где-либо еще на летательном аппарате 700. Хотя летательный аппарат 700 показан имеющим один движитель 710, следует понимать, что могут быть обеспечены также дополнительные движители 710. Например, один или более движителей 710 могут быть обеспечены на каждой панели 704 крыла.
[165] На ФИГ. 8а-8c схематично показаны примеры гибридного поля обзора, вырабатываемого радиолокационным датчиком 412 и инфракрасной камерой 414, относительно летательного аппарата 700. Как показано на чертежах, радиолокационный датчик 412 полезной нагрузки 162 в виде датчика обнаружения препятствий и инфракрасная камера 414 могут быть использованы совместно для более эффективного обнаружения и отслеживания не отвечающих на запросы препятствий 344 в пределах гибридного поля обзора. Как можно понять, гибридное поле обзора обеспечивается как за счет способности радиолокационного датчика 412 выполнять сканирование в диапазоне 360 градусов на дальность своего действия, так и за счет способности инфракрасной камеры 414 точно обнаруживать не отвечающие на запросы препятствия 344.
[166] На ФИГ. 8а показан вид сверху двумерной карты 800 радиального представления, представляющий гибридное поле обзора. В одном аспекте радиолокационный датчик 412 может быть выполнен с возможностью выработки двумерной карты 800 радиального представления воздушного пространства возле летательного аппарата 700 без азимутального разрешения. Двумерная карта 800 радиального представления может представлять собой круговое воздушное пространство вокруг летательного аппарата 700, т.е. летательный аппарат 700 размещен в центре двумерной карты 800 радиального представления). Размер двумерной карты 800 радиального представления может определяться дальностью действия радиолокационного датчика 412. Например, если радиолокационный датчик 412 имеет эффективную дальность действия 36 миль (расстояние Y 604=36 миль), круговое воздушное пространство вокруг летательного аппарата может иметь радиус 36 миль. В процессе эксплуатации радиолокационный датчик 412 может быть выполнен с возможностью определения препятствий 344 в пределах двумерной карты 800 радиального представления и, если препятствие 344 обнаружено радиолокационным датчиком 412, инфракрасная камера 414 может быть направлена на препятствие 344 для обеспечения обзора с более высоким разрешением (например, изображения) за препятствием 344. Процессор, функционально соединенный с инфракрасной камерой 414, может сравнивать изображение препятствия 344 с более высоким разрешением с базой данных известных форм/изображений (например, справочной таблицей). Например, особенно в случае наблюдения, база данных форм/изображений может способствовать классификации типа препятствия 344 и/или уровня угрозы со стороны препятствия 344. Такой метод также может быть использован при оценке уровней угрозы со стороны объектов при обнаружении многочисленных препятствий 344 для определения, если необходимо, какое из препятствий более опасно с присвоением ему приоритета и уклонением от него/его подсчетом (например, птица будет менее опасна, чем летательный аппарат).
[167] На ФИГ. 8b представлен вид сбоку гибридного поля обзора. Если радиолокационный датчик 412 обнаруживает препятствие 344 в пределах радиуса двумерной карты 800 радиального представления, инфракрасная камера 414 может быть нацелена в направлении препятствия 344 для обеспечения контроля с более высоким разрешением, когда препятствие 344 находится в пределах дальности действия инфракрасной камеры 414 (например, в пределах расстояния X 602, которое может представлять собой эффективную дальность действия инфракрасной камеры 414). Как показано на чертежах на ФИГ. 8b, инфракрасная камера 414 может наклоняться вверх и вниз для определения и отслеживания азимутального положения препятствия 344 (например, в пределах вертикального поля обзора). Например, если инфракрасная камера 414 предлагает азимутальное поле обзора 25°, инфракрасная камера 414 может наклоняться вверх на 12,5° и вниз на 12,5° (относительно линии полета).
[168] На ФИГ. 8с показан вид сверху двумерной карты 800 радиального представления, разделенной на множество радиальных секторов 802. Для локализации препятствия 344 в пределах воздушного пространства гибридного поля обзора двумерная карта 800 радиального представления может быть разделена на заданное количество радиальных секторов 802, т.е. N радиальных секторов). Например, каждый радиальный сектор 802 может быть представлен в виде двух прямых сторон, т.е. иметь одинаковую длину в виде радиуса круговой двумерной карты радиального представления) и прямой (или криволинейный) край. Заданное количество радиальных секторов 802 может определяться, например, рабочими параметрами датчика полезной нагрузки 162 в виде датчика обнаружения препятствий (например, инфракрасной камеры 414). Например, в показанном выше примере, инфракрасная камера 414 обеспечивает поле обзора величиной 12° в горизонтальном направлении и, таким образом, 360° могут быть разделены на 30 радиальных секторов, т.е. N=360°/ горизонтальное поле обзора = 360°/12°=30). Таким образом, инфракрасная камера 414 может быть выполнена с возможностью панорамирования между N положениями в пределах 360 градусов двумерной карты 800 радиального представления. В частности, для определения точного азимутального положения препятствия 344 инфракрасной камере 414 необходимо сканировать только конкретный радиальный сектор 802.
[169] Как объяснено выше, радиолокационный датчик 412 обеспечивает отличную дальность действия и таким образом обеспечивает возможность более быстрого определения удаленных препятствий 344 в пределах двумерной карты 800 радиального представления. Инфракрасная камера 414, однако, обеспечивает большую точность и разрешение, но имеет более ограниченную дальность действия и поле обзора. Таким образом, радиолокационный датчик 412 может быть использован для определения положения препятствия 344 в пределах радиального сектора 802 двумерной карты 800 радиального представления и для направления инфракрасной камеры 414 в радиальный сектор 802, в котором определено нахождение препятствия 344. Например, если радиолокационный датчик 412 обнаруживает препятствие 344а, представляющее непосредственную угрозу, в пределах первого радиального сектора 802а (например, в пределах первого заданного расстояния 342а), инфракрасная камера 414 может выполнять панорамирование от своего текущего местоположения к первому радиальному сектору 802а для дальнейшего анализа препятствия 344а, представляющего непосредственную угрозу, и наблюдения за ним. Схожим образом, учитывая увеличенную дальность действия, обеспечиваемую радиолокационным датчиком 412, радиолокационный датчик 412 может обнаруживать препятствие 344b, представляющее угрозу средней степени, которое может находиться за пределами эффективной дальности действия инфракрасной камеры 414 (например, между первым заданным расстоянием 342а и вторым заданным расстоянием 342b). Например, если в пределах второго радиального сектора 802b обнаружено препятствие 344b, представляющее угрозу средней степени, инфракрасная камера 414 может выполнить панорамирование от своего текущего местоположения ко второму радиальному сектору 802b для выполнения дальнейшего анализа препятствия 344b, представляющего угрозу средней степени, и наблюдения за ним, когда препятствие 344b, представляющее угрозу средней степени, находится в пределах эффективной дальности действия инфракрасной камеры 414.
[170] Между данными радиолокации от радиолокационного датчика 412 и данными от инфракрасной камеры 414, полезная нагрузка 162 в виде датчика обнаружения препятствий может обеспечивать данные, отражающие, помимо прочего, текущее местоположение (в трех измерениях), траекторию и физические характеристики (например, размер и форму) каждого препятствия 344. Кроме того, полезная нагрузка 162 в виде датчика обнаружения препятствий может выполнять идентификацию (например, хвостовой номер, если известно), состояние (например, отвечающий на запросы или не отвечающий на запросы) и т.д. Местоположение и различные рабочие условия для каждого препятствия 344 затем могут быть переданы в базовую платформу 102 и/или систему 116 управления полетом для проведения пилотом или системой 100 автоматизации работы летного экипажа соответствующих действий. Как отмечено выше со ссылкой на ФИГ. 3c-3e, полезная нагрузка 162 в виде датчика обнаружения препятствий и любые препятствия 344 могут контролироваться человеко-машинным интерфейсом 104 посредством приложения 336 контроля полезной нагрузки в виде датчика. Приложение 336 контроля полезной нагрузки в виде датчика может быть выполнено с возможностью выполнения оценки всей информации, собираемой радиолокационным датчиком 412 и инфракрасной камерой 414, а также контроля исправности указанных датчиков. Приложение 336 контроля полезной нагрузки в виде датчика также может быть выполнено с возможностью отслеживания воздушного движения и выработки будущих прогнозируемых маршрутов для отображения пилоту. Например, на основании различных измерений препятствия, включая радиус, азимут и расстояние, маршрутное устройство 160 управления может вырабатывать маршрут полета, обеспечивающий уклонение от препятствий, для уклонения от одного или более препятствий, обнаруженных полезной нагрузкой 162, выполненной в виде датчика обнаружения препятствий. Приложение 336 контроля полезной нагрузки в виде датчика также может быть выполнено с возможностью выдачи пилоту подсказки для выбора выработанного маршрута полета, обеспечивающего уклонение от препятствий и подлежащего выполнению системой 116 управления полетом.
[171] Система 114 накопления знаний.
Система 114 накопления знаний собирает знания в базу и/или вырабатывает базу знаний, необходимых для обеспечения для системы 100 автоматизации работы летного экипажа возможности определения информации, характерной для летательного аппарата. Указанное включает знание рабочих характеристик, ограничений, карт контрольных проверок и процедур летательного аппарата (в том числе процедур действий в экстренной ситуации) и критериев, определяющих нештатные ситуации в летательном аппарате. Данные могут быть извлечены из комбинации кодированных данных (например, из руководств, инструктажей пилотов, руководства по летной эксплуатации) и данных, получаемых в полете (например, посредством датчиков), которые поддерживают автономное машинное обучение и анализ тенденций. Данные для кодирования могут быть загружены в формате .xml (или .xmlx), который описывает содержимое процедур и поток задач как во время процедур, так и между процедурами.
[172] Как показано на ФИГ. 1b, например, система 114 накопления знаний может принимать рабочие команды от базовой платформы 102, с отправкой в базовую платформу 102 данных конфигурации и информации о состоянии и реагировании, вырабатываемых системой 114 накопления знаний. Работа системы 114 накопления знаний может быть в целом разделена на три процесса, включающих, например, моделирование систем летательного аппарата, кодификацию процедур и моделирование аэродинамики. Процесс моделирования систем летательного аппарата позволяет выдавать в систему 100 автоматизации работы летного экипажа информацию о доступных бортовых системах и о конфигурации этих бортовых систем, предельных значениях для исполнительных механизмов и т.п. Процесс кодификации процедур позволяет обеспечивать систему 100 автоматизации работы летного экипажа информацией о работе летательного аппарата в нормальных и ненормальных ситуациях. Кодификация процедур может включать в себя, например, кодификацию карт контрольных проверок. В завершении, процесс моделирования аэродинамики позволяет обеспечивать систему 100 автоматизации работы летного экипажа информацией о полете летательного аппарата и о том, какую производительность следует ожидать для данного типа и конфигурации летательного аппарата.
[173] Во время фазы накопления знаний также должны быть установлены условия, при которых ситуацию считают аномалией или нештатной ситуацией. Эти условия часто возникают по отдельности, например заброс оборотов двигателя или превышение предельного значения воздушной скорости. Используя машинное обучение, система 100 автоматизации работы летного экипажа может осуществлять тонкую настройку своих моделей аэродинамики и управления посредством наблюдения за серией полетных маневров, выполняемых пилотом. Эта информация включает в себя данные о динамике полета, рабочие ограничения, процедуры, системы и компоновки летательного аппарата, а также другие соответствующие данные. Помимо письменной информации система 100 автоматизации работы летного экипажа также может кодировать информацию на основании прошедших событий и опыта более опытных пилотов. Машинное обучение обеспечивает быстрое и эффективное накопление знаний.
[174] Использование системы 106 восприятия системы 100 автоматизации работы летного экипажа и системы 108 исполнительных механизмов обеспечивает контроль приборов и органов управления в кабине самолета или тренажера по мере того, как пилот выполняет движения согласно стандартному профилю полета. Наблюдение за действиями пилота позволяет системе 100 автоматизации работы летного экипажа учиться непосредственно у пилота и имитировать ровное управление с использованием экспертной системы для данной операции. Для этого процесса благоприятно, что полетные операции очень структурированы в том, что должно быть сделано в данной ситуации - благодаря этому машинное обучение позволяет кодифицировать, как и что должно быть исполнено.
[175] Заполнение структуры 208 данных летательного аппарата может быть осуществлено с использованием расширяемого языка разметки (Extensible Markup Language, XML). В частности, может быть использована структура данных XML, содержащая набор полей и деревья данных, которые при заполнении позволяет базовой платформе 102 конфигурировать летательный аппарат и управлять им. В некоторых аспектах система 100 автоматизации работы летного экипажа может выполнять анализ полетных документов на естественном языке и/или использовать программный инструмент, что позволяет человеку осуществлять эффективный и точный ввод данных.
[176] В некоторых аспектах может быть произведена выработка и кодирование набора признаков, независящих от самолета. Например, процедуры типа уборки шасси, действий при отказе двигателя на многодвигательном летательном аппарате и вывод из режима сваливания одинаковы для летательных аппаратов многих типов и потребуют минимального изменения для конкретной конструкции летательного аппарата. Кроме того, основные ограничения по конструкции летательного аппарата (такие как значения скорости, которые никогда нельзя превышать) необходимо вводить только в виде конкретных чисел, и они могут быть взяты из руководств по летной эксплуатации в течение номинального периода времени.
[177] Редактор процедур.
Информация, характерная для летательного аппарата, может быть собрана во время переходного периода с использованием, например, письменной документации (например, руководства по летной эксплуатации, руководства по техническому обслуживанию и т.п.), а также во время непосредственного контроля операций летательного аппарата. Результатом этого процесса накопления знаний является структура 208 данных летательного аппарата, описанная выше в отношении базовой платформы 102. В этой структуре 208 данных летательного аппарата могут содержаться рабочие процедуры, доступные системы и их конструкции, компоновка кабины и вся другая информация, необходимая для безопасной эксплуатации летательного аппарата. В некоторых аспектах пакет программ для разработки приложений автоматизации работы летного экипажа может позволить инженеру по программному обеспечению/ответственному за органы управления полетом определять, кодировать и тестировать одну подсистему летательного аппарата (например, электрическую или гидравлическую) в день. Пакет программ для разработки приложений автоматизации работы летного экипажа может обеспечивать инструменты для преобразования процедур из руководства по летной эксплуатации в конечные автоматы, совместимые с программами Matlab State Flow и Simulink, которые затем могут автоматически кодировать процедуры на языке С для включения в базовую платформу 102. Пакет программ для разработки приложений автоматизации работы летного экипажа также может вырабатывать тестовый код для уровня блока, а также интерфейсы для тестирования с передачей в базовую платформу 102. Например, редактор процедур может обеспечивать выдачу списка задач, где пилот может выбирать, несет ли ответственость за данную задачу в списке система 100 автоматизации работы летного экипажа или пилот.
[178] Накопление знаний об управлении полетом.
На первом этапе при накоплении знаний об управлении полетом используют программу оценки аэродинамики и динамики полета Athena Vortex Lattice (AVL) для получения математической модели в виде безразмерных производных устойчивости, которые используются и уточняются пилотом во время полета. После калибровки механизмов основных органов управления полетом может быть использовано системное идентифицирующее приложение учебного полета для выполнения последовательности полетных маневров, предназначенных для определения конкретных производных устойчивости. Данные автоматически обрабатываются с получением обновленных производных устойчивости для использования в контроллере. Контроллер может использовать устройство автоматической настройки. Эти же обновленные производные устойчивости используются при моделировании с шестью степенями свободы в качестве этапа контрольной проверки правильности работы контроллеров перед полетом. Еще одно преимущество накопления знаний об управлении управления полетом заключается в обеспечении возможности уточнения и включения большого количества знаний, относящихся к формальным процедурам. Хотя в процедурах изложены отдельные этапы, конкретные подробности их выполнения могут отсутствовать (например, сколько следует ждать между этапами или насколько резко следует увеличить подачу газа).
[179] Реверсивная инженерия полетных рабочих характеристик летательного аппарата.
Рабочие характеристики летательного аппарата, которые могут быть измерены бортовыми блоками накопления данных, производителями летательных аппаратов и авиационного электронного оборудования, обычно считаются своей собственностью. Эта информация может быть использована для моделирования полета, контроля исправности летательного аппарата, разработки летательного аппарата и многого другого. В настоящее время желание третьих сторон использовать накопленные бортовые данные ограничено их проприетарной природой. Это ограничение было частично преодолено использованием автономных комплектов датчиков летательного аппарата. Эти имеющиеся в продаже комплекты датчиков измеряют только часть данных, доступных посредством приборов кабины, и сигналы управления, поступающие от пилота. При этом, поскольку в системе 100 автоматизации работы летного экипажа используется множество датчиков для определения летных характеристик летательного аппарата, она обеспечивает возможность эффективной реверсивной инженерии рабочих характеристик воздушного транспортного средства. Система 100 автоматизации работы летного экипажа собирает информацию о летательном аппарате с помощью комбинации автономных датчиков, захвата данных в виде изображений приборов кабины и органов управления, которыми вводятся данные управления.
[180] Пример.
Аспекты раскрытия настоящего изобретения могут быть проиллюстрированы на примере следующего плана полета, который показывает, как система 100 автоматизации работы летного экипажа может взаимодействовать с пилотом, выполнять план полета, выполнять полетные задачи и реагировать на нештатные ситуации во время включения системы и взлета, выполнения плана полета и обнаружения и обработки аномалий. Однако идеи настоящего изобретения не следует считать ограниченными использованными в этом примере.
[181] Включение системы и взлет.
Пилот садится в левое кресло летательного аппарата, пристегивает ремни безопасности, размещает средства человеко-машинного интерфейса 126 сбоку от себя так, чтобы было удобно, и активирует приложение системы 100 автоматизации работы летного экипажа. Приложение загружается и запускает ряд диагностик, проводимых при включении питания, и подается питание на средства механического интерфейса и осуществляет их калибровку. На человеко-машинном интерфейсе 126 может быть отображено сообщение, подтверждающее успешность проверки с запросом пилота на подтверждение включения системы 100 автоматизации работы летного экипажа. Пилот выбирает дневной план полета посредством закладки 334 приложений. Система 100 автоматизации работы летного экипажа может быть использована для контроля выполнения карт контрольных проверок. Пилот выбирает запуск двигателя, и система 100 автоматизации работы летного экипажа может начинать последовательность действий по запуску двигателя, запрашивая окончательное подтверждение до фактического запуска. В это время пилот может обратиться к диспетчеру на вышке за разрешением и принимает план полета для следования в зону тренировочных полетов.
[182] После запуска двигателя система 100 автоматизации работы летного экипажа может сообщить пилоту об успешности запуска и выдает сообщение, например "готов выполнить руление" (ready to taxi), (либо голосом, либо посредством человеко-машинного интерфейса 126). Пилот запрашивает разрешение на руление, и, услышав его, система 100 автоматизации работы летного экипажа воспроизводит разрешение на руление и выводит отображение этого пилоту для подтверждения. После этого пилот в приложении нажимает кнопку "руление с разрешением" (taxi via clearance), и система 100 автоматизации работы летного экипажа выполняет руление к назначенной взлетно-посадочной полосе, в то время как пилот следит за движением транспортных средств. При нахождении на пороге взлетно-посадочной полосы пилот голосом командует системе 100 автоматизации работы летного экипажа выполнить проверку перед взлетом (посредством карты контрольных проверок), и система завершает все необходимые проверки, предлагая пилоту вручную выполнить двойную проверку важных элементов, таких как органы управления полетом. Например, система 100 автоматизации работы летного экипажа может контролировать исполнение человеком-оператором действий по карте контрольных проверок и выдавать сообщение "действия по карте контрольных проверок завершены" (checklist complete) или определять план полета или ошибку.
[183] После получения еще одного разрешения от диспетчера пилот выдает команды системе 100 автоматизации работы летного экипажа на выруливание летательного аппарата на исполнительный старт и ожидание с последующим взлетом. Система 100 автоматизации работы летного экипажа толкает дроссельные заслонки вперед посредством системы 108а основных исполнительных механизмов, визуально выполняет проверку индикаторов двигателя и кабины посредством системы 106 восприятия, выявляет значения скорости посредством системы 104 на основе человеко-машинного интерфейса и осуществляет поворот со скоростью, подходящей для текущих веса, балансировки и высоты по плотности воздуха. Пилот держит свои руки на ручке/колонке 514 управления для подтверждения сигналов, поступающих от системы 100 автоматизации работы летного экипажа и сохранения своей мышечной памяти. Система 100 автоматизации работы летного экипажа подтверждает эксплуатационные характеристики летательного аппарата согласно текущим условиям и сообщает о каких-либо отклонениях от предполагаемой скорости набора высоты. Система 100 автоматизации работы летного экипажа уменьшает рабочую нагрузку на пилота во время набора высоты, что позволяет увеличить время, в течение которого пилот смотрит вперед (т.е. его глаза направлены вперед, а не на приборы), для отслеживания движения транспортных средств в рабочем воздушном пространстве. Система 100 автоматизации работы летного экипажа также может выдавать совет опытного пилота для данной карты контрольных проверок, летательного аппарата или местоположения. Например, в конкретном аэропорту система 100 автоматизации работы летного экипажа может выдавать инструкции человеку-оператору, используя информацию, относящуюся к конкретном аэропорту, такие как "крутой угол вылета с этой взлетно-посадочной полосы" (steep departure angle from this runway).
[184] Выполнение плана полета.
После набора высоты, система 100 автоматизации работы летного экипажа выравнивает летательный аппарат и регулирует настройки триммирования и мощности при направлении к первой путевой точке в плане полета. Во время крейсерского полета система 100 автоматизации работы летного экипажа продолжает осуществлять визуальный контроль всех кабинных устройств отображения, постоянно сравнивая характеристики двигателя и эксплуатационные характеристики летательного аппарата с предполагаемыми значениями и предупреждая пилота о любых отклонениях.
[185] Летательный аппарат прибывает в зону тренировочных полетов и начинает выполнение дневного плана полета.
Однако во время планового полета летательный аппарат попадает в кучевое облако, и при этом приборные метеорологические условия (ПМУ) ниже температур замерзания. Пилот запрашивает и принимает разрешение с земли посредством окна системы групповых дискуссий в сети Интернет (internet relay chat, IRC) на человеко-машинном интерфейсе 126, на подъем до 24000 футов (7300 м), чтобы подняться выше неблагоприятных погодных условий. В некоторых аспектах система 100 автоматизации работы летного экипажа запрашивает разрешение у наземного диспетчера.
[186] Обнаружение и обработка аномалий.
Спустя некоторое время система 100 автоматизации работы летного экипажа может обнаружить, что при данном наборе высоты показываемая индикаторами воздушная скорость медленно отклоняется от расчетной воздушной скорости для этих настроек тангажа и мощности, показывая значения ниже предполагаемых. Это является признаком того, что нагреватель Пито является неисправным и трубки Пито покрыты льдом. У пилота менее 100 часов налета на данном летательном аппарате, и он не знает, что нагреватели Пито в этой модели как известно, ненадежны. Пилот еще не заметил, что показания индикатора воздушной скорости становятся ниже номинальных.
[187] Однако система 100 автоматизации работы летного экипажа распознает, что данные воздушной скорости являются аномальными для остальных полетных данных полета и ее внутренней модели динамики полета и устно предупреждает пилота об "отказе индикатора воздушной скорости" (airspeed indicator fault). Хотя пилот понимает, что информация о воздушной скорости в настоящее время ненадежна, он не знает, больше или меньше фактическая скорость летательного аппарата по сравнению с тем, что показывают индикаторы.
[188] На основе базы данных предшествующих аномалий система 100 автоматизации работы летного экипажа представляет ряд процедурных вариантов и обозначает минимальную безопасную высоту для данного района (например, 8000 футов (2400 м)). Пилот выбирает наиболее консервативный вариант, который определяет параметры полета без крена, тангаж и мощность для занятия более низкой высоты (например, 10000 футов (3000 м)). Система 100 автоматизации работы летного экипажа медленно тянет на себя РУДы с переводом их в режим малого газа, выполняет небольшой наклон и начинает снижение. При снижении до 15000 футов (4600 м) трубки Пито снова работают в оперативном режиме. После стабилизации на высоте 10000 футов (3000 м) система 100 автоматизации работы летного экипажа удерживает прямо и ровно летательный аппарат, пока пилот оценивает ситуацию перед тем, как вернуться к плану полета.
[189] После завершения плана полета на день система 100 автоматизации работы летного экипажа может выполнить процедуру автоматической посадки. Например, система 100 автоматизации работы летного экипажа может привести летательный аппарат к заданной путевой точке, в которой летательный аппарат может начать свое первоначальное снижение. Во время снижения система 100 автоматизации работы летного экипажа может контролировать полетные условия и определять местоположение взлетно-посадочной полосы. После захода на посадку система 100 автоматизации работы летного экипажа может замедлять летательный аппарат и, в конечном счете, осуществить посадку летательного аппарата. Если система 100 автоматизации работы летного экипажа определяет, что посадку осуществить невозможно (например, вследствие препятствия или неприемлемых полетных условий), система 100 автоматизации работы летного экипажа может начать стандартную программу ухода на второй круг или другую стандартную программу для нештатной ситуации. Например, система 100 автоматизации работы летного экипажа может снова попытаться посадить летательный аппарат в том же месте или провести его к альтернативному месту посадки. Пример системы посадки летательного аппарата в альтернативном месте посадки раскрыт в принадлежащей заявителю публикации заявки на патент США №2015/0323932, озаглавленной "Автономная система доставки грузов" (Autonomous Cargo Delivery System).
[190] Система 100 автоматизации работы летного экипажа и соответствующие технологии могут быть применены в самых различных летательных аппаратах и летных тренажерах. Летные характеристики, полученные исходя из испытаний в полете летательного аппарата, могут быть использованы для повышения точности воспроизведения летных тренажеров, операторов для подготовки пилотов. Обеспечение доступа летных тренажеров к фактическим эксплуатационным данным летательного аппарата имеет огромную ценность для операторов летных тренажеров. Еще одним преимуществом системы 100 автоматизации работы летного экипажа является ее способность синтезировать полетные характеристики, когда летательный аппарат модифицируют для полетов по специальному плану, например, с помощью дополнительных датчиков и антенн, которые могут повлиять на аэродинамические и полетные характеристики (например, при разработке летательных аппаратов). Кроме того, данные, собранные системой 100 автоматизации работы летного экипажа, могут быть использованы для контроля исправности летательного аппарата, с опорой на прогностические данные для определения необходимости технического обслуживания.
[191] Система 100 автоматизации работы летного экипажа способствует обеспечению безопасности и эффективности проведения операций в гражданской авиации со значительным при этом сокращении эксплуатационных затрат, связанных с человеком. Например, система 100 автоматизации работы летного экипажа может быть применена к транспортным перевозкам на дальние расстояния для повышения безопасности и эффективности, а также сокращения затрат представленной передовой технологии, способствующей пилотированию. Кроме того, представленный конечный автомат, например, может служить в качестве тренировочного приспособления для пилотов в полете или в качестве системы безопасности, обеспечивая второй комплект средств видения в том, что традиционно является летательным аппаратом с одним пилотом. Части человеко-машинного интерфейса 126 оптимизируют все полетные операции, выполняемые пилотом, даже операции, выполняемые экипажем из нескольких человек.
[192] Вышеуказанные патенты и патентные публикации включены в настоящий документ посредством ссылки во всей своей полноте. Хотя различные варианты реализации описаны со ссылкой на конкретную конфигурацию деталей, элементов и т.п., они не предназначены для исчерпания всех возможных конфигураций или элементов, поскольку специалистами в данной области техники могут быть определены многие другие варианты реализации, модификации и варианты. Таким образом, следует понимать, что изобретение может быть осуществлено на практике иначе, чем, в частности, описано выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЗАЦИИ РАБОТЫ ЛЕТНОГО ЭКИПАЖА | 2017 |
|
RU2732646C2 |
| СИСТЕМА С УСТРОЙСТВОМ АВИАЦИОННОЙ ЭЛЕКТРОНИКИ И НАЗЕМНОЙ СТАНЦИЕЙ ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, ОТКЛОНИВШИМСЯ ОТ МАРШРУТА, И ДЛЯ АВАРИЙНОЙ СВЯЗИ | 2003 |
|
RU2318243C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2757549C2 |
| СИСТЕМА ЗАЩИТЫ САМОЛЕТА ОТ ОШИБОЧНЫХ ИЛИ УМЫШЛЕННЫХ ДЕЙСТВИЙ, ПРИВОДЯЩИХ К КАТАСТРОФЕ | 2001 |
|
RU2228885C2 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ С ВОЗДУШНЫМ СУДНОМ И БЕСПИЛОТНЫЙ АППАРАТ, ОСНАЩЁННЫЙ СИСТЕМОЙ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2013 |
|
RU2581455C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| СПОСОБ НАВИГАЦИИ БЕСПИЛОТНОГО АППАРАТА В ПРИСУТСТВИИ ПОСТОРОННЕГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНЫЙ АППАРАТ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2015 |
|
RU2661242C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2370416C1 |
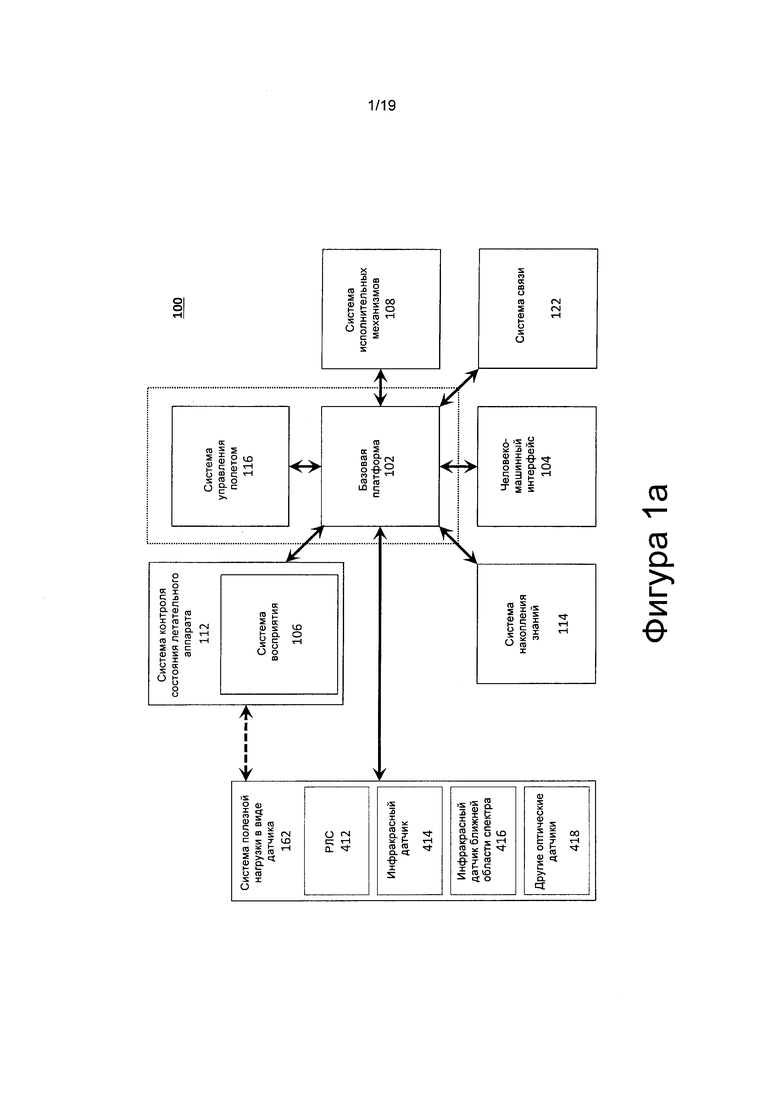
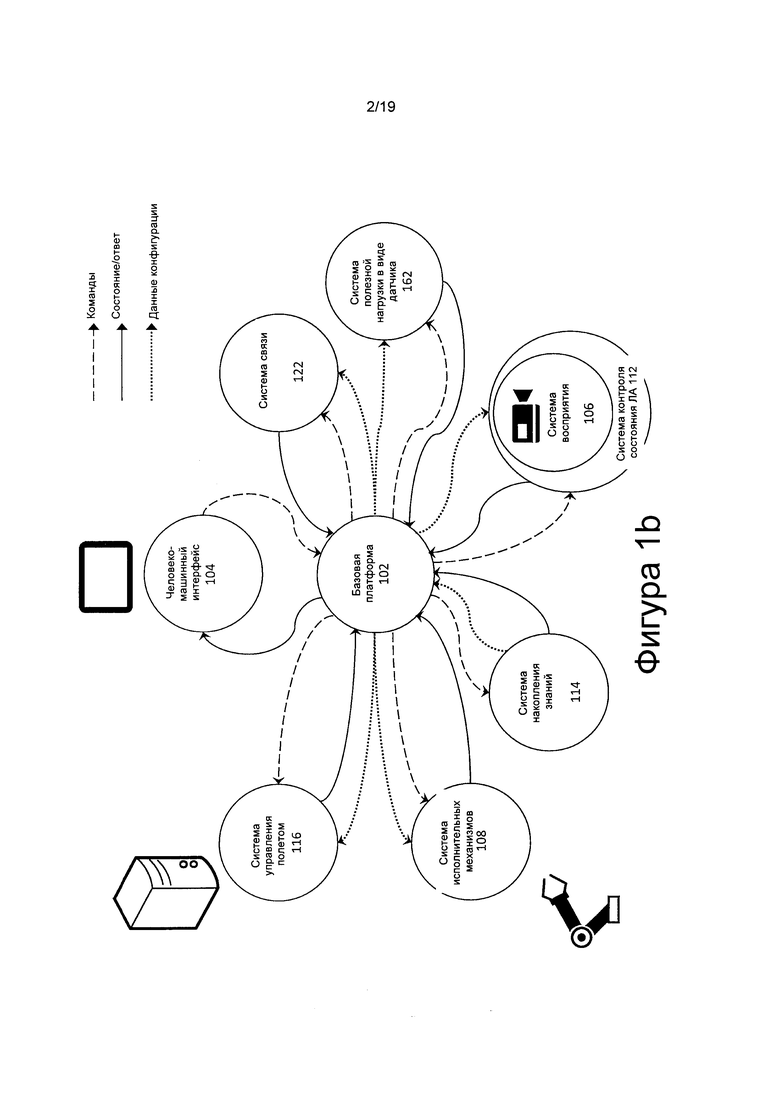
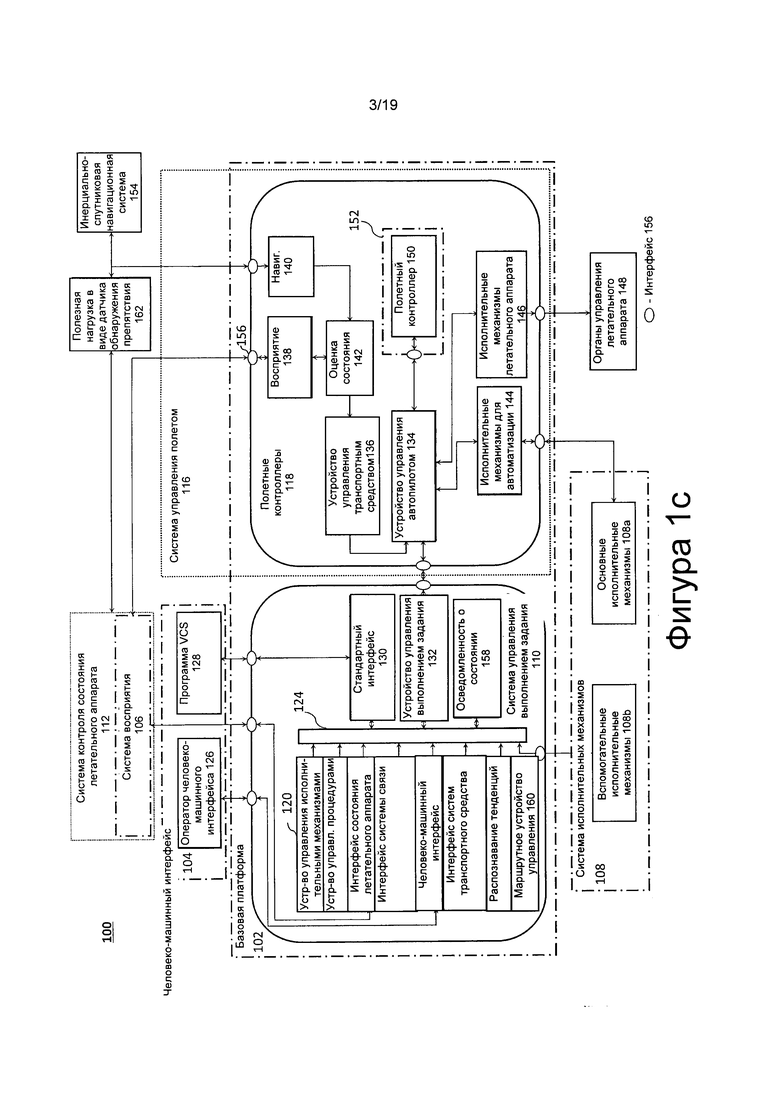
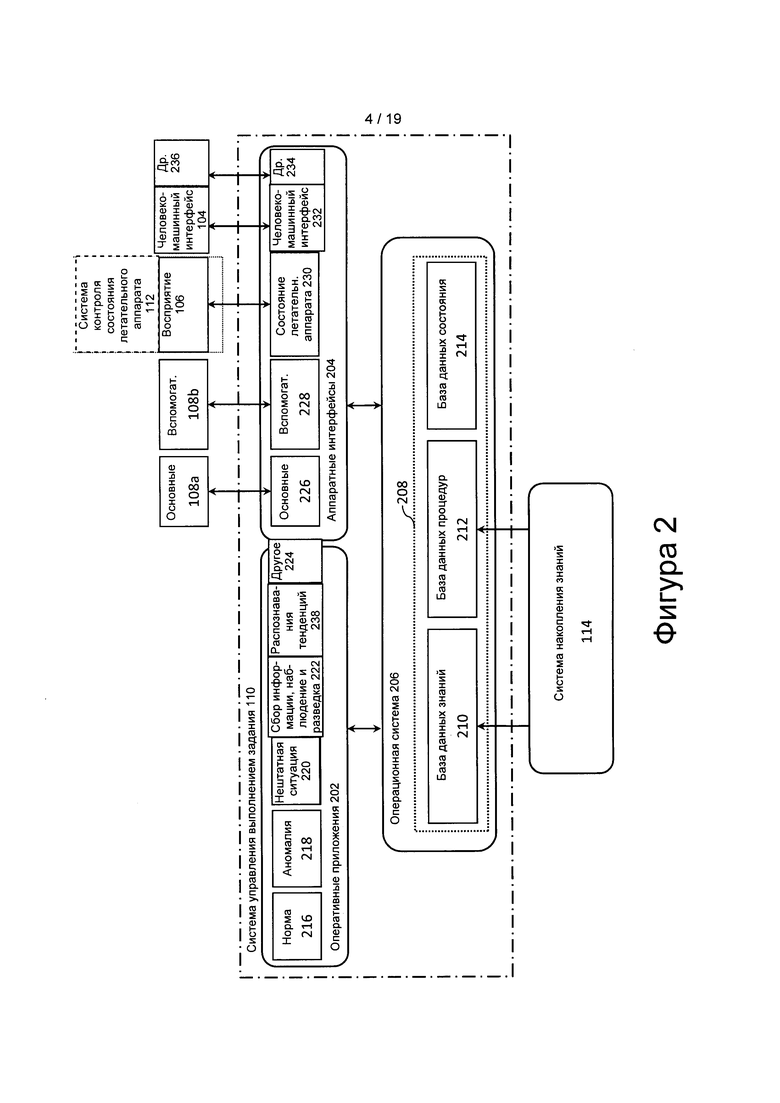
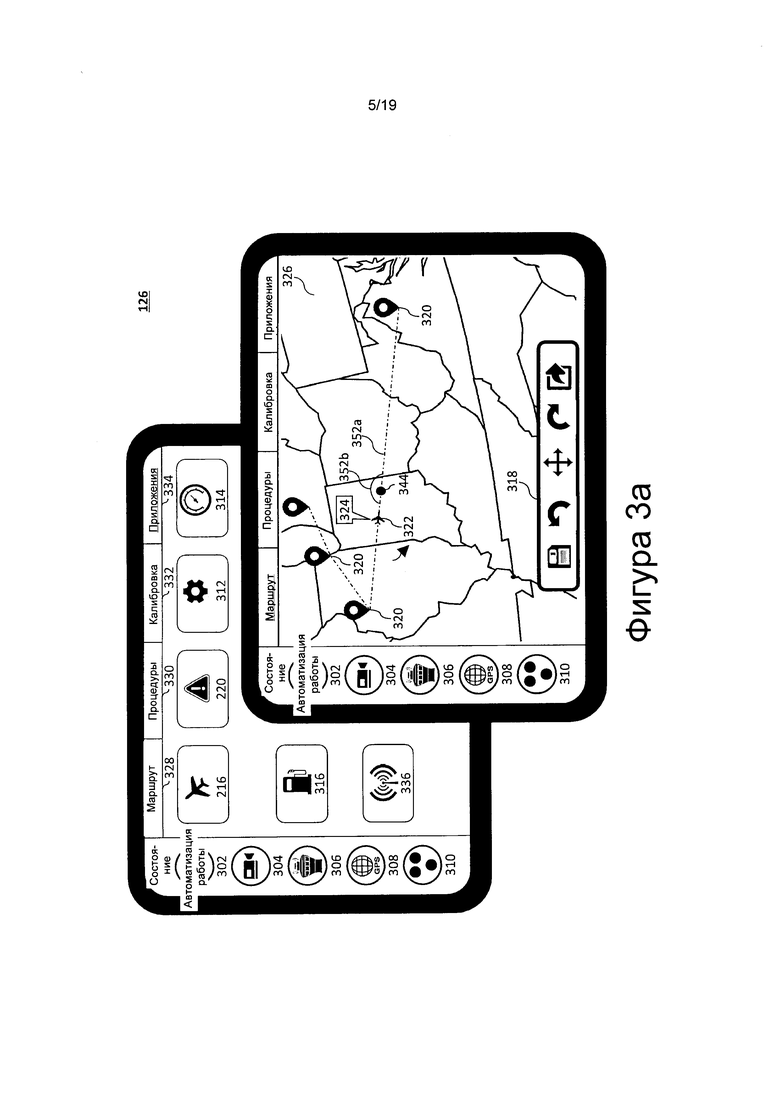

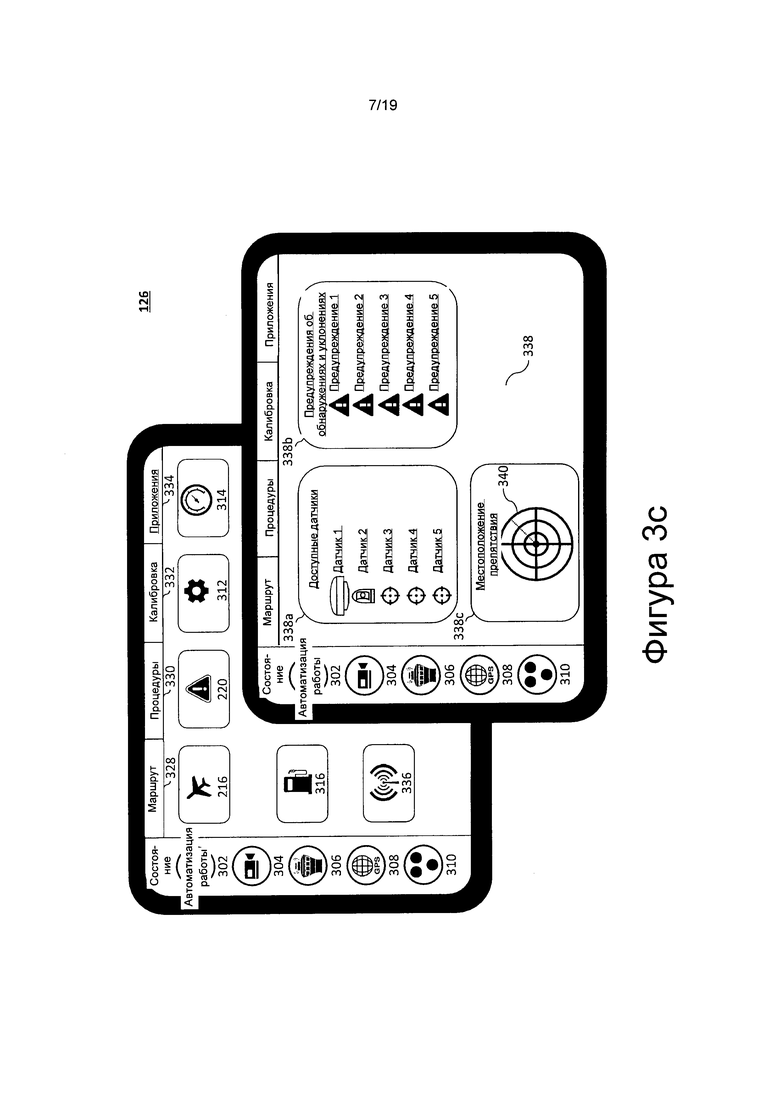
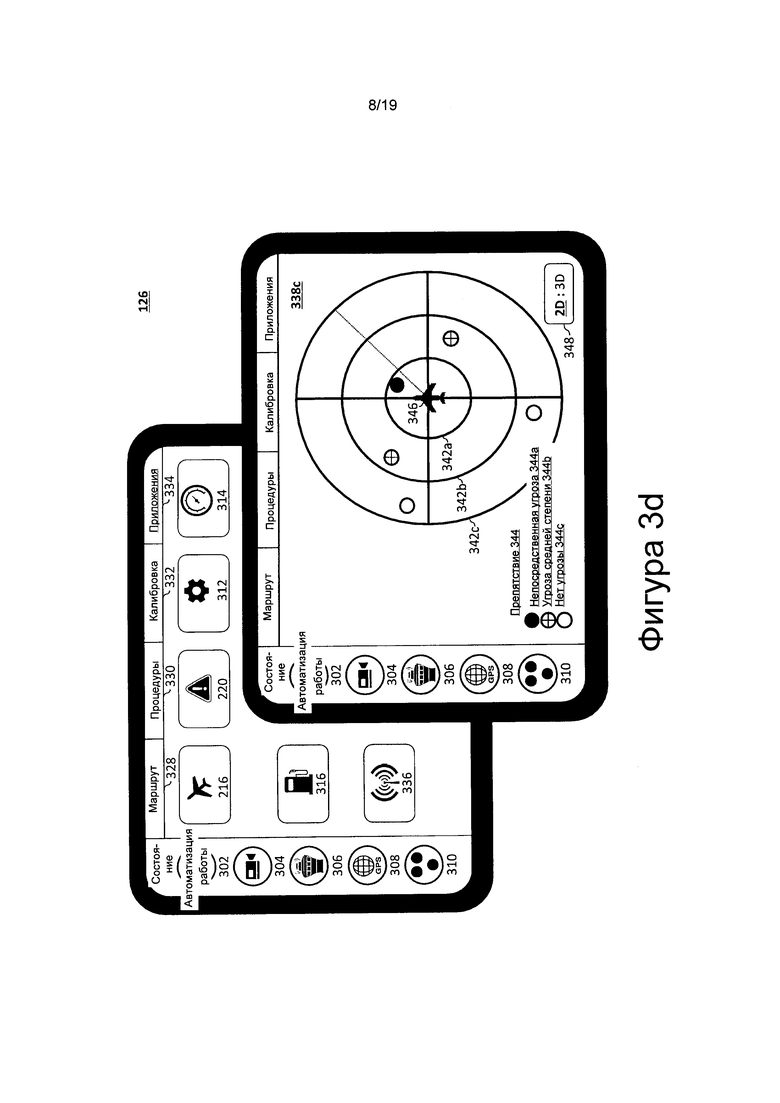
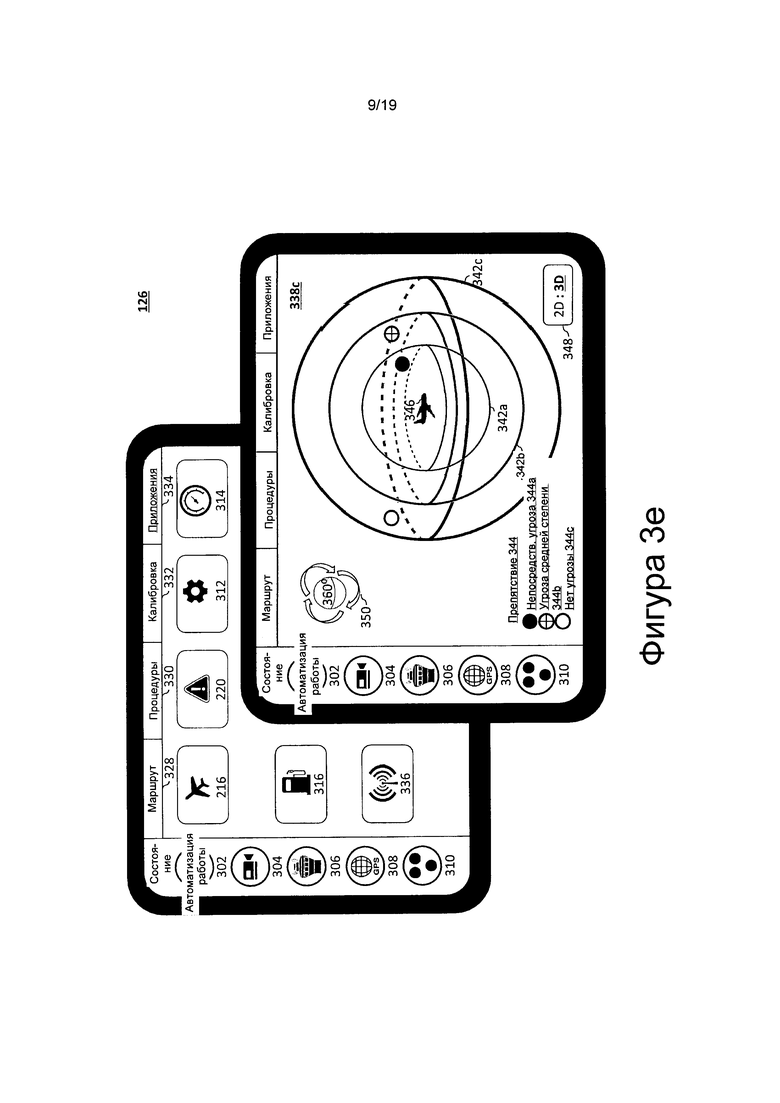
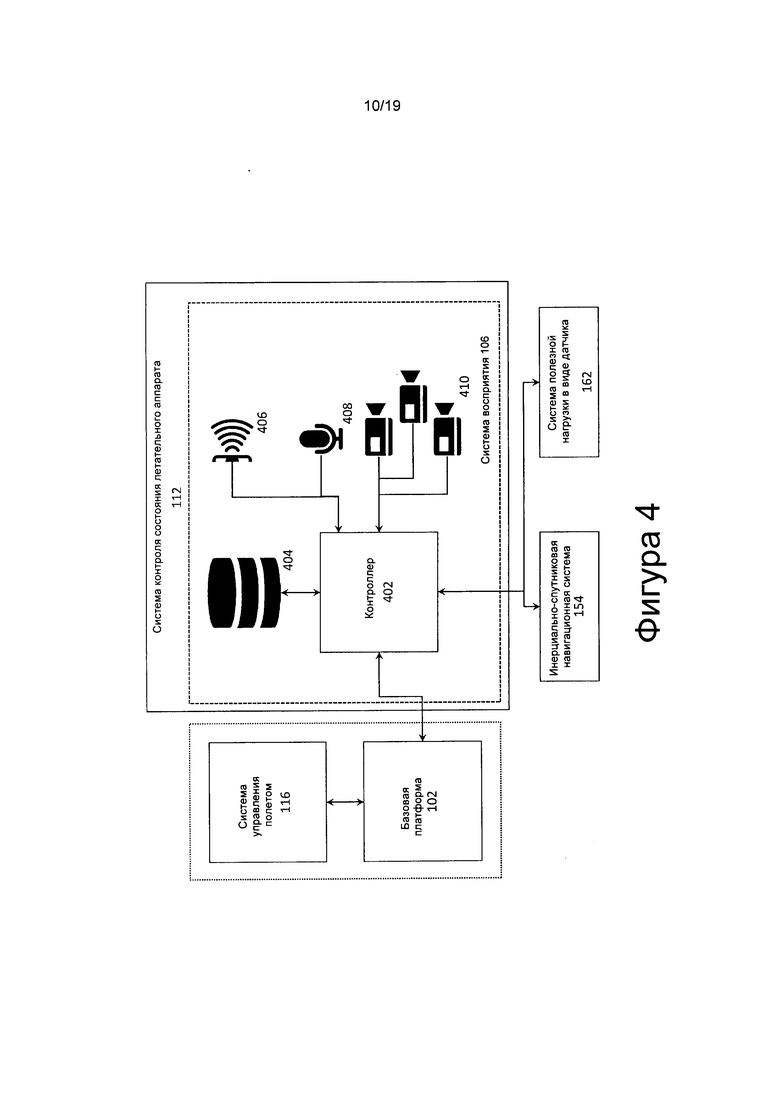
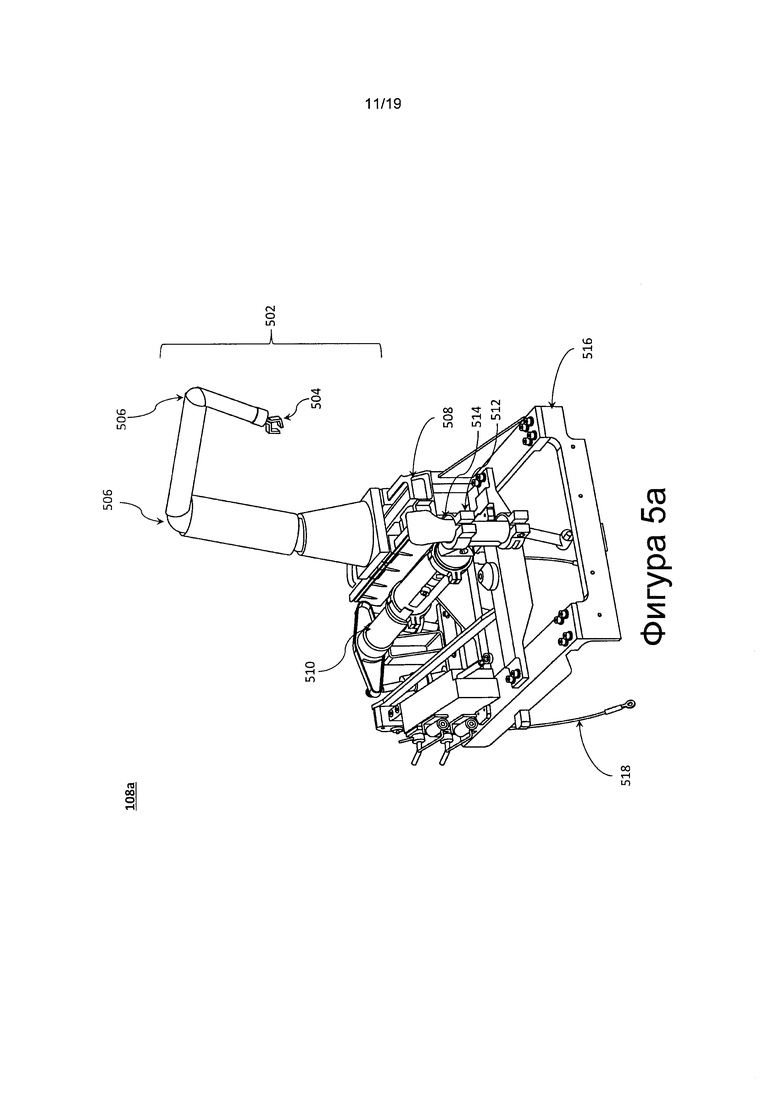
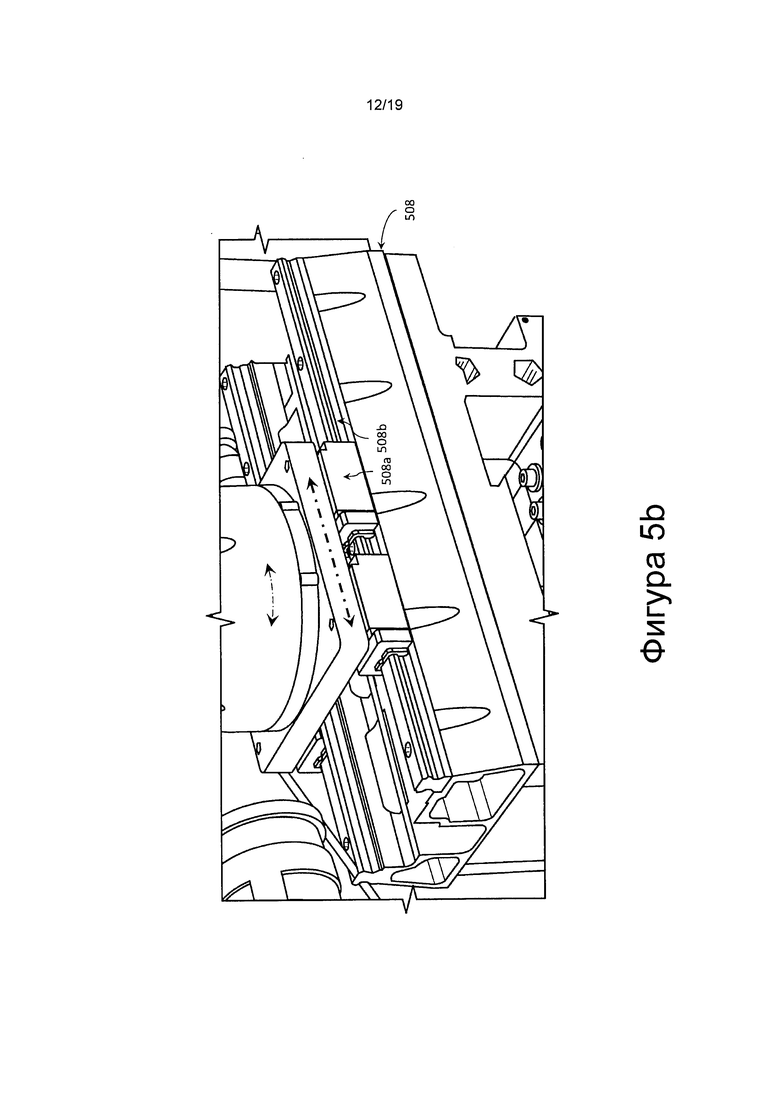
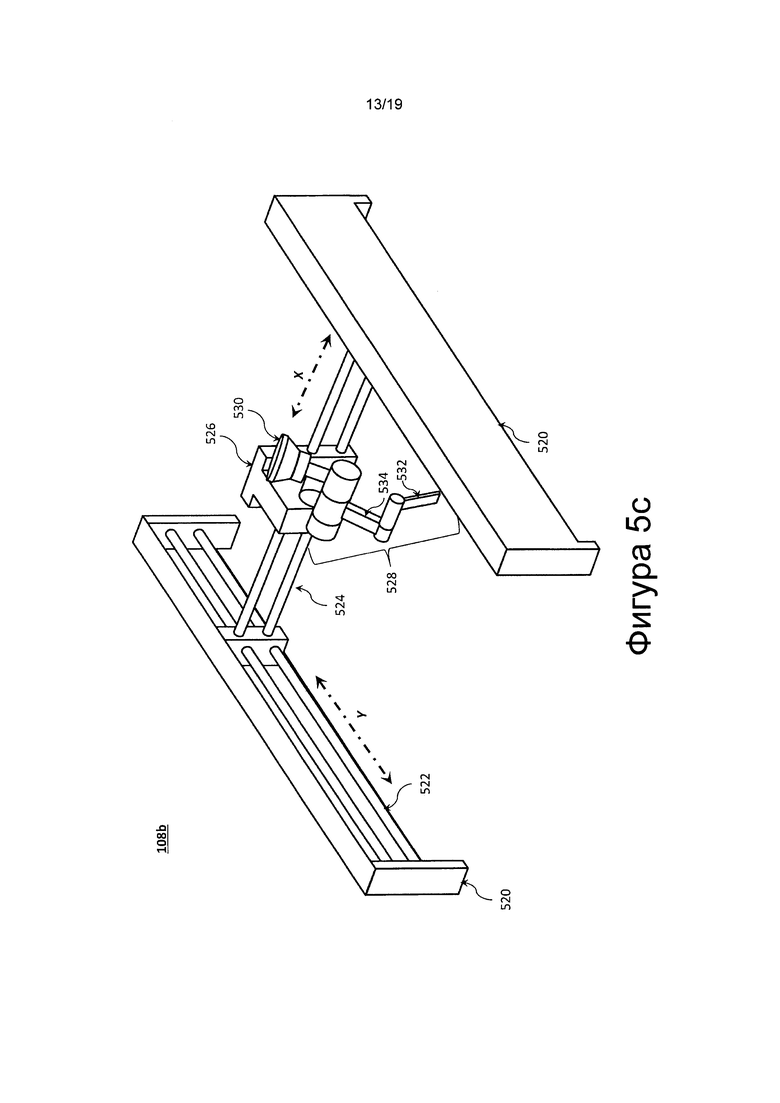
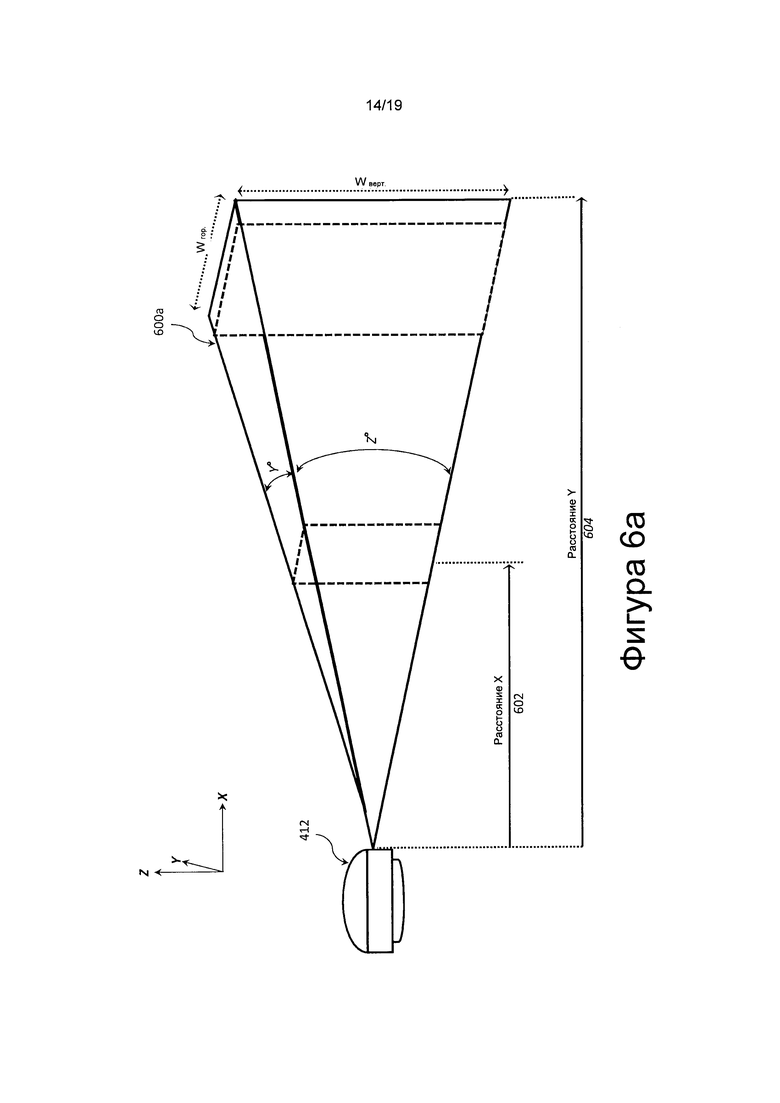
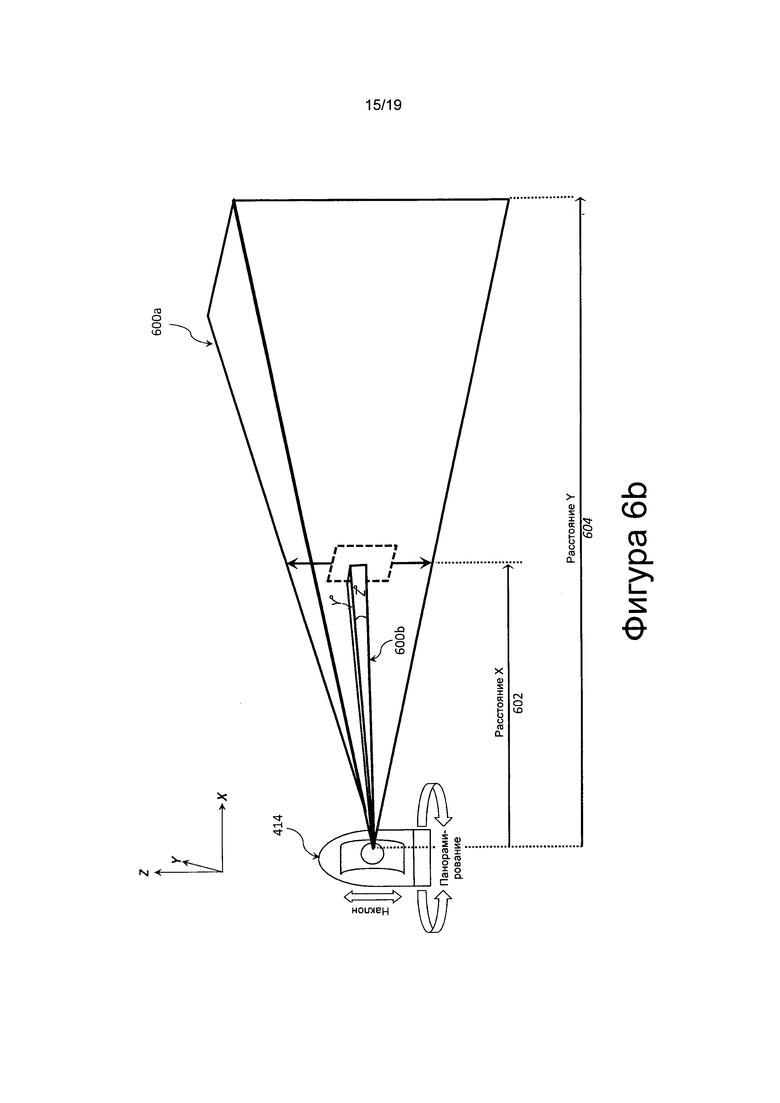
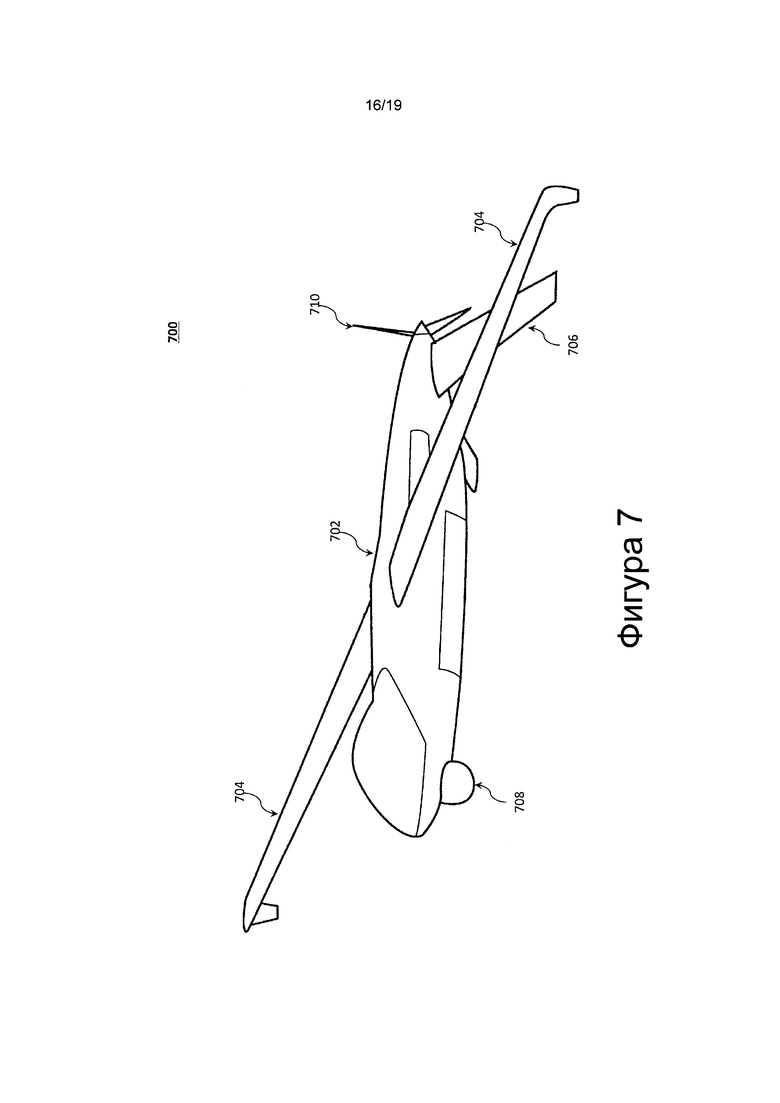
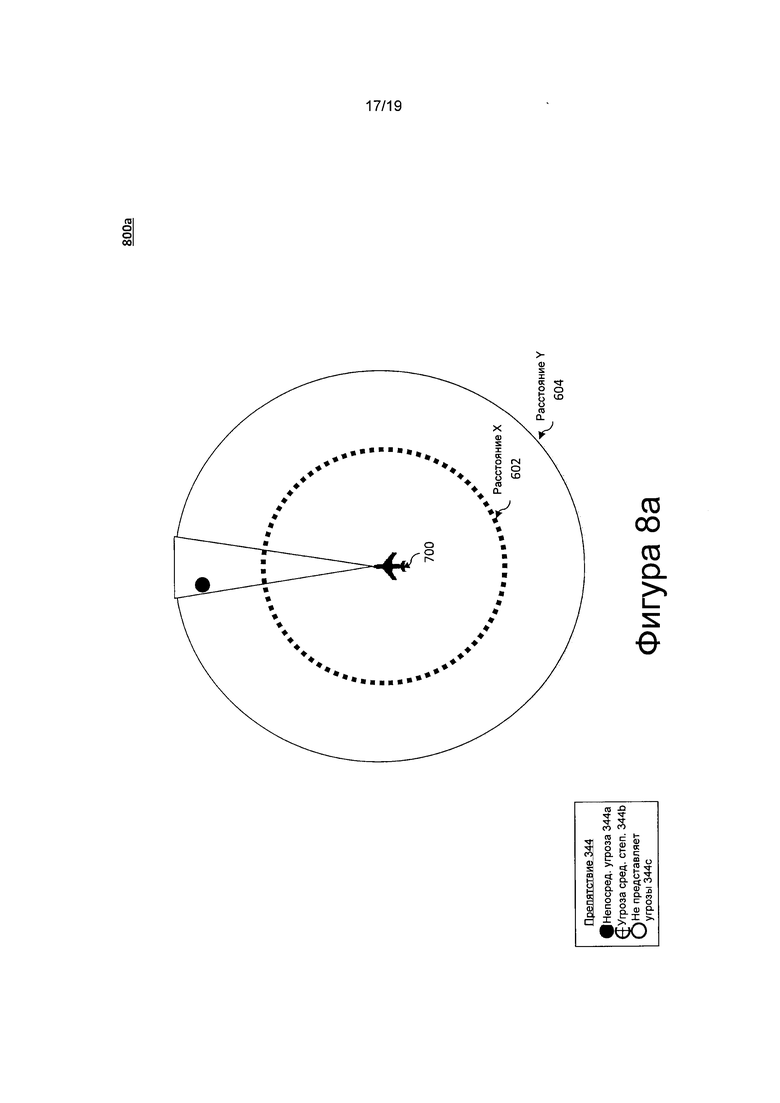
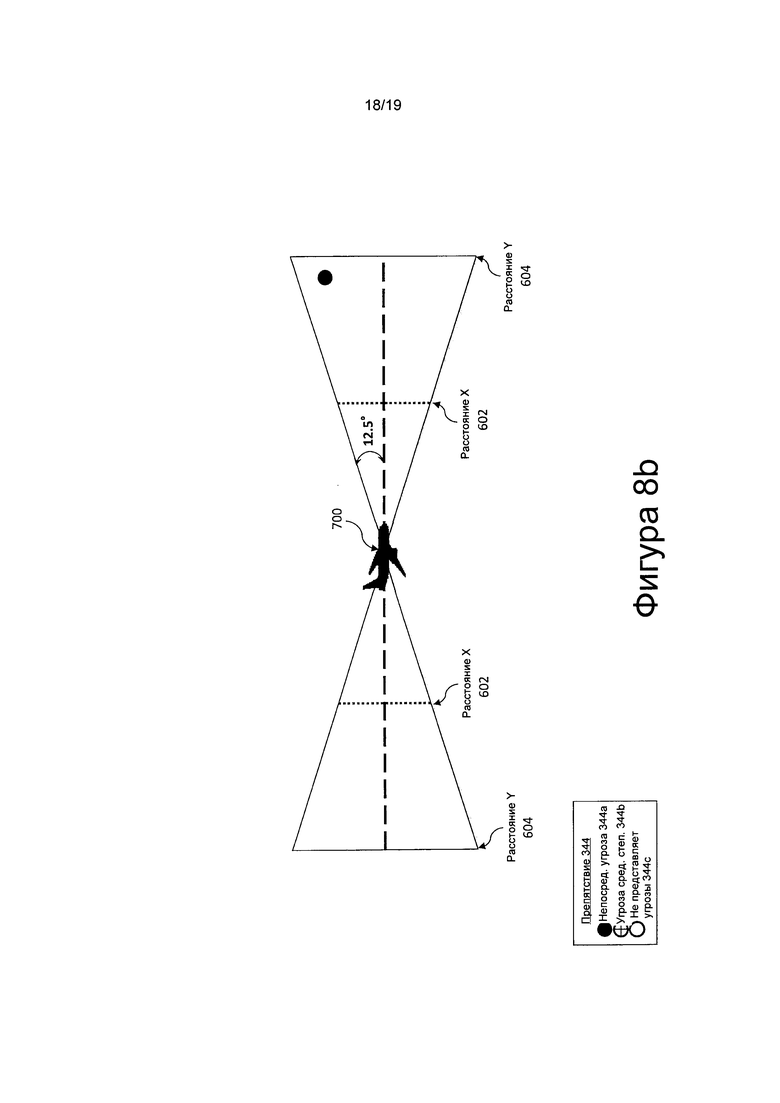
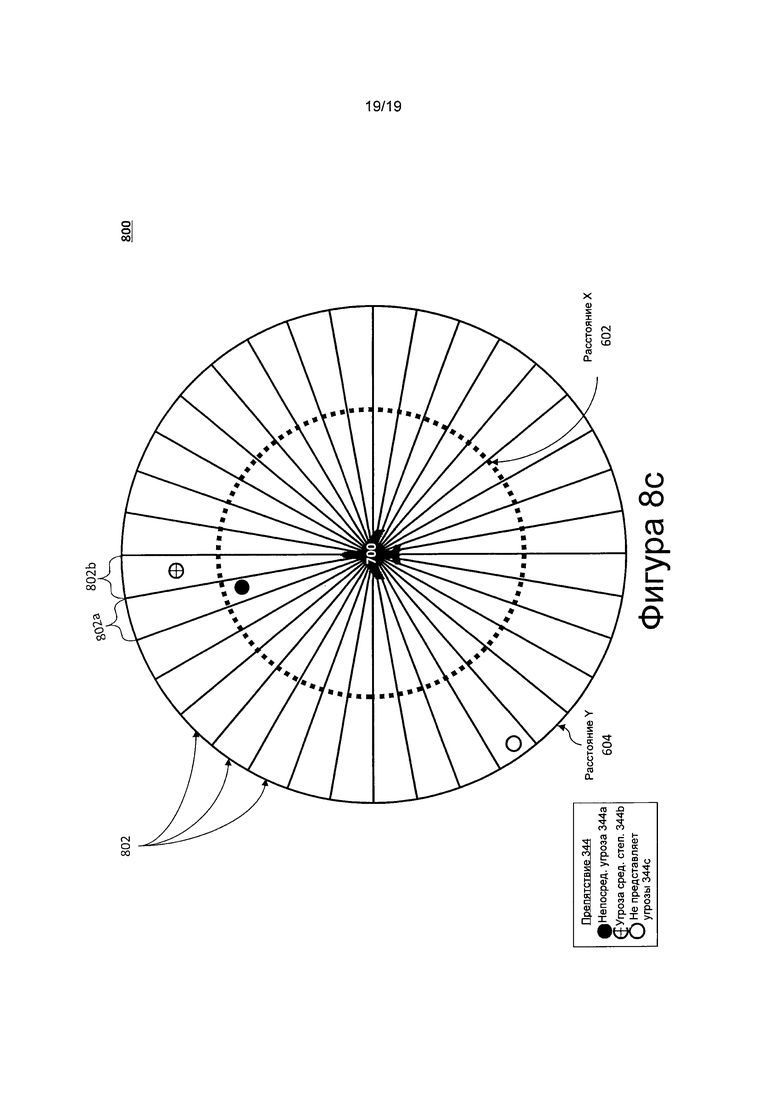
Группа изобретений относится к системе и способу обнаружения препятствий в летательном аппарате. Система содержит радиолокационную станцию для радиального сканирования воздушного пространства, камеру для получения оптической информации, процессор. Для обнаружения не отвечающих на запросы препятствий производят сканирование первого воздушного пространства с определенным разрешением, получают изображение второго воздушного пространства, находящееся в вышеуказанном первом пространстве и имеющее более высокое разрешение, производят отслеживание препятствия на основе полученной информации, вырабатывают прогнозируемую траекторию полета и маршрут, обеспечивающий уклонение от препятствия, и сообщают маршрут в систему управления полетом летательного аппарата. Обеспечивается повышение безопасности полета, расширение функциональности без больших затрат и сертификации. 2 н. и 13 з.п. ф-лы, 19 ил.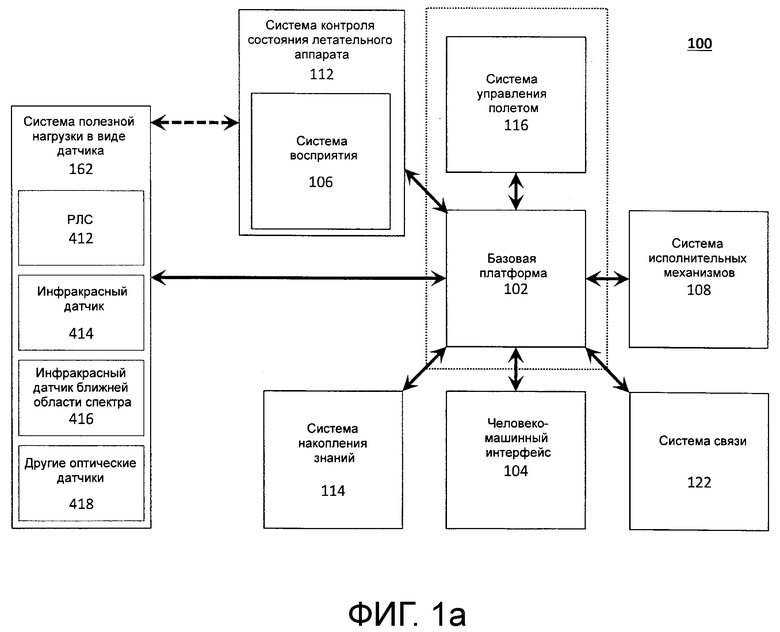
1. Система обнаружения препятствий для использования в летательном аппарате (346, 700), содержащая:
полезную нагрузку в виде датчика (406) для обнаружения не отвечающего на запросы препятствия (344) в первом воздушном пространстве, находящемся возле летательного аппарата (346, 700), причем полезная нагрузка в виде датчика (406) содержит радиолокационную станцию для радиального сканирования первого воздушного пространства с выработкой радиолокационной информации, имеющей первое разрешение, и камеру (410) для получения изображения второго воздушного пространства в указанном первом воздушном пространстве с выработкой оптической информации со вторым разрешением, которое выше, чем первое разрешение; и
процессор, функционально соединенный с полезной нагрузкой в виде датчика (406), причем процессор выполнен с возможностью определения местоположения не отвечающего на запросы препятствия (344) и для определения не отвечающего на запросы препятствия (344) в виде функции радиолокационной информации и оптической информации.
2. Система обнаружения препятствий по п. 1, в которой камера (410) выполнена с возможностью панорамирования и наклона.
3. Система обнаружения препятствий по п. 2, в которой камера (410) включает в себя датчик (406) длинноволнового инфракрасного излучения.
4. Система обнаружения препятствий по п. 2 или 3, в которой камера (410) включает в себя электрооптический датчик (416), работающий в видимой и ближней инфракрасной области спектра.
5. Система обнаружения препятствий по пп. 2, 3 или 4, в которой оптическая информация включает в себя по меньшей мере одно из теплового сечения и оптического сечения.
6. Система обнаружения препятствий по пп. 1-4 или 5, в которой
радиолокационная информация включает в себя двумерное местоположение не отвечающего на запросы препятствия (344) в первом воздушном пространстве, а
оптическая информация включает в себя азимутальное положение не отвечающего на запросы препятствия (344) во втором воздушном пространстве.
7. Система обнаружения препятствий по пп. 1-5 или 6, в которой процессор выполнен с возможностью выработки прогнозируемой траектории полета для не отвечающего на запросы препятствия (344) на основании по меньшей мере частично радиолокационной информации и оптической информации.
8. Система обнаружения препятствий по пп. 1-6 или 7, в которой первое воздушное пространство обеспечивает поле обзора величиной 360 градусов вокруг летательного аппарата (346, 700).
9. Система обнаружения препятствий по п. 8, в которой поле обзора величиной 360 градусов остается в плоскости, которая параллельна линии полета, задаваемой летательным аппаратом (346, 700).
10. Способ обнаружения и уклонения от не отвечающего на запросы препятствия (344) во время эксплуатации летательного аппарата (346, 700), включающий:
сканирование первого воздушного пространства с использованием радиолокационной системы для выработки радиолокационной информации, имеющей первое разрешение;
получение изображения второго воздушного пространства с использованием камеры (410) для выработки оптической информации со вторым разрешением, которое выше, чем первое разрешение, причем второе воздушное пространство находится в указанном первом воздушном пространстве;
отслеживание не отвечающего на запросы препятствия (344) на основании по меньшей мере частично радиолокационной информации и оптической информации;
выработку прогнозируемой траектории полета на основании по меньшей мере частично радиолокационной информации и оптической информации;
выработку маршрута полета, обеспечивающего уклонение от препятствий, для уклонения от не отвечающего на запросы препятствия (344) и
сообщение маршрута полета, обеспечивающего уклонение от препятствий, в систему управления полетом летательного аппарата (346, 700).
11. Способ по п. 10, согласно которому летательный аппарат (346, 700) выполнен с возможностью автономного выполнения выработанного маршрута полета, обеспечивающего уклонение от препятствий.
12. Способ по п. 10, согласно которому камера (410) включает в себя датчик (406) длинноволнового инфракрасного излучения, выполненный с возможностью панорамирования и наклона.
13. Способ по п. 10, также включающий этап определения азимутального положения не отвечающего на запросы препятствия (344) во втором воздушном пространстве с использованием камеры (410).
14. Способ по п. 10, согласно которому радиолокационная станция представляет собой механически вращающуюся корабельную радиолокационную станцию.
15. Способ по п. 10, также включающий этап выработки посредством процессора прогнозируемой траектории полета для не отвечающего на запросы препятствия (344) на основании по меньшей мере частично данных, принимаемых от полезной нагрузки в виде датчика (406).
| US 20170084183 A1, 23.03.2017 | |||
| US 20160275802 A1, 22.09.2016 | |||
| US 20110160950 A1, 30.06.2011 | |||
| ОБЪЕМНЫЙ РАСХОДОМЕР ЖИДКОСТИ ИЛИ ГАЗА | 0 |
|
SU164139A1 |
| СПОСОБ ПОЛУЧЕНИЯ НА ЛЕТАТЕЛЬНОМ АППАРАТЕ (ЛА) УЛУЧШЕННОГО ИЗОБРАЖЕНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2015 |
|
RU2591029C1 |

