Текст описания в факсимильном виде (см. графическую часть). Тз
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С АДАПТИВНЫМ ФИЛЬТРОМ | 1998 |
|
RU2148836C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С КОРРЕКТИРУЕМЫМ ФИЛЬТРОМ | 1999 |
|
RU2156477C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С ОБНАРУЖИТЕЛЕМ МАНЕВРА И АДАПТИВНОЙ КОРРЕКЦИЕЙ ПРОГНОЗА | 2005 |
|
RU2296348C2 |
| ДВУХДИАПАЗОННЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2181899C2 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С ОБНАРУЖИТЕЛЕМ МАНЕВРА | 2004 |
|
RU2253131C1 |
| СПОСОБ И СИСТЕМА СОВМЕСТНОЙ ОБРАБОТКИ ИЗМЕРЕНИЙ ДАЛЬНОСТИ И СКОРОСТИ ДЛЯ МНОГОДИАПАЗОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ КРУГОВОГО ОБЗОРА | 2014 |
|
RU2572079C2 |
| СПОСОБ И СИСТЕМА ИДЕНТИФИКАЦИИ ИЗМЕРЕНИЙ В МНОГОДИАПАЗОННЫХ РЛС | 2014 |
|
RU2574075C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
| Способ и система многоцелевого сопровождения в двухпозиционных радиолокационных системах | 2018 |
|
RU2716495C1 |
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |

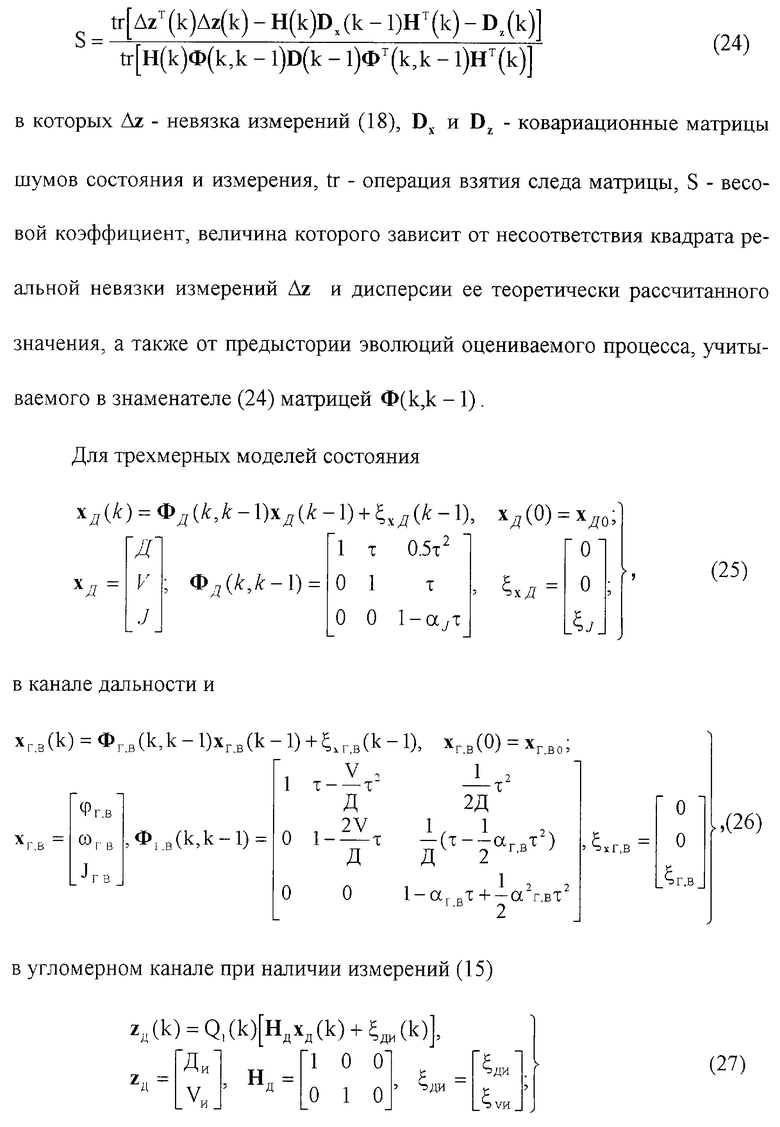
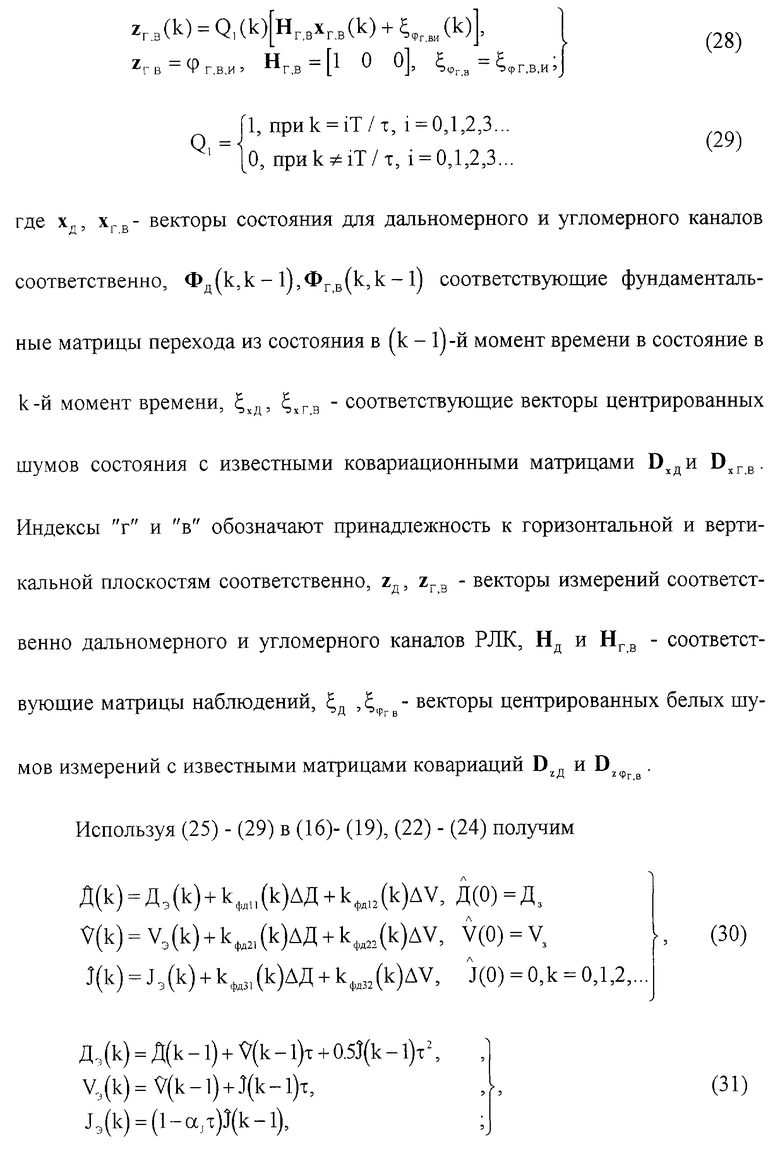
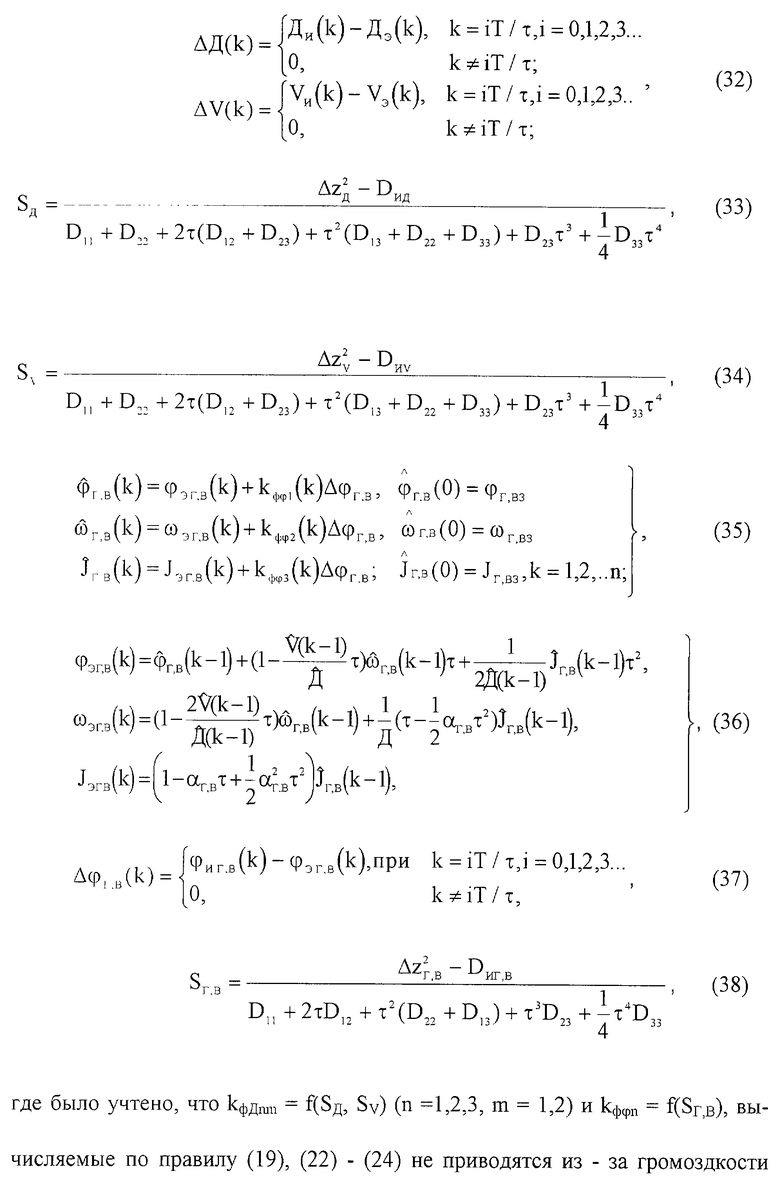
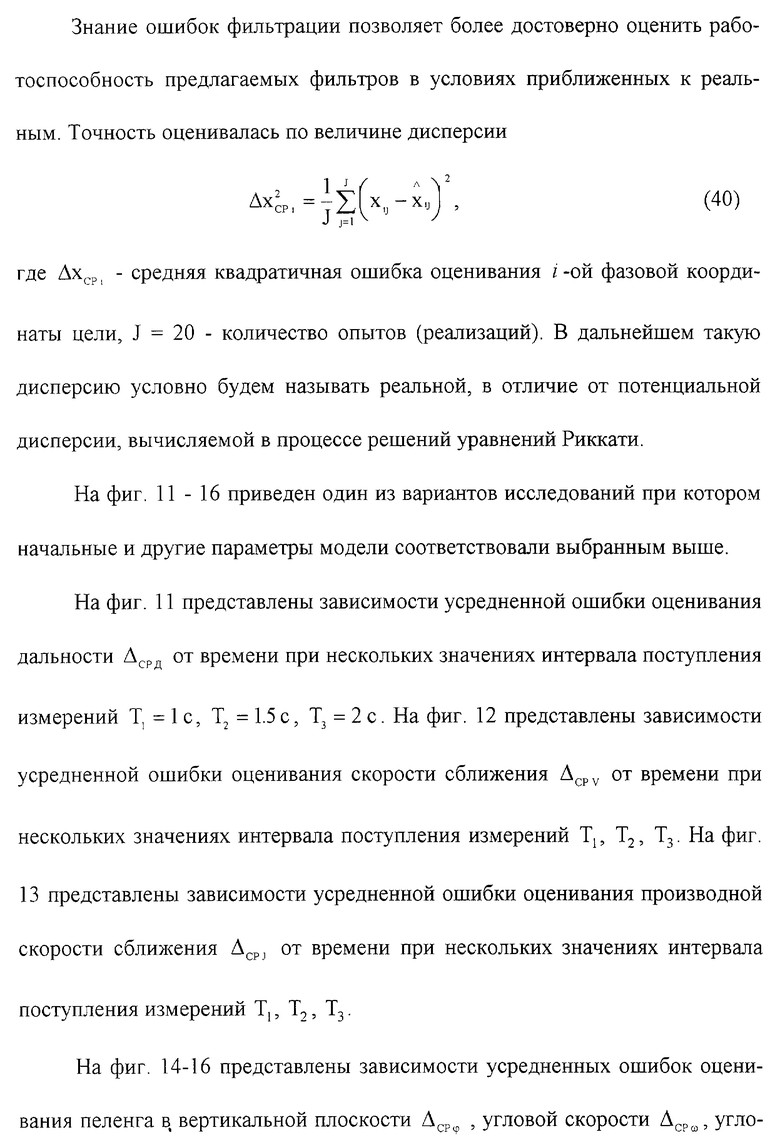
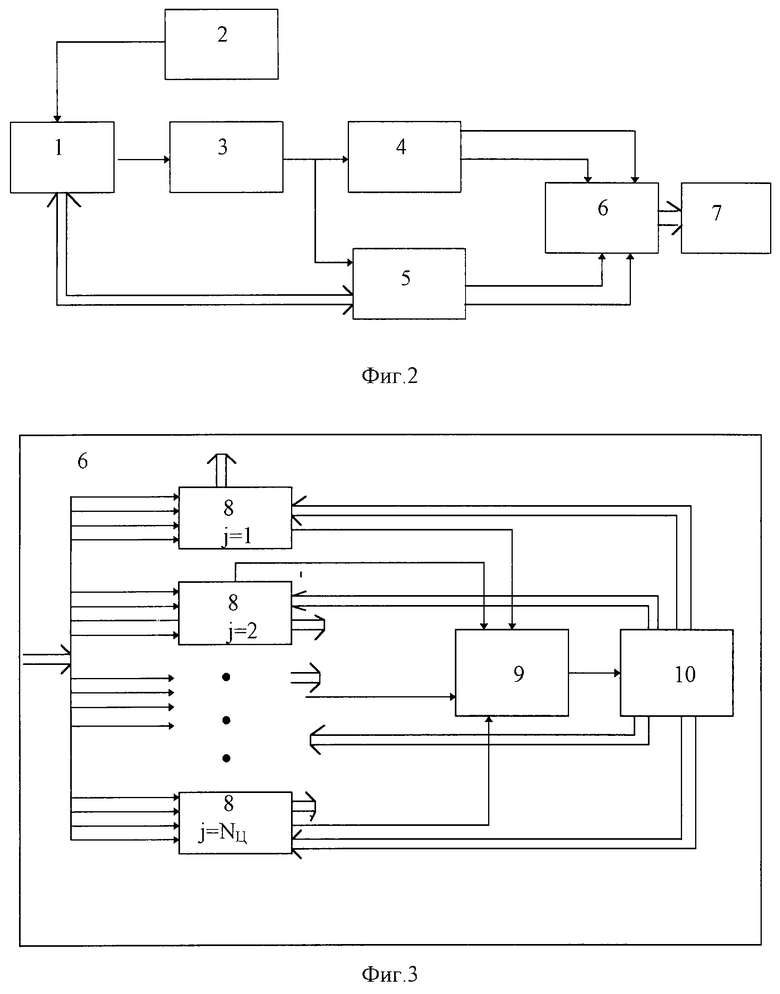
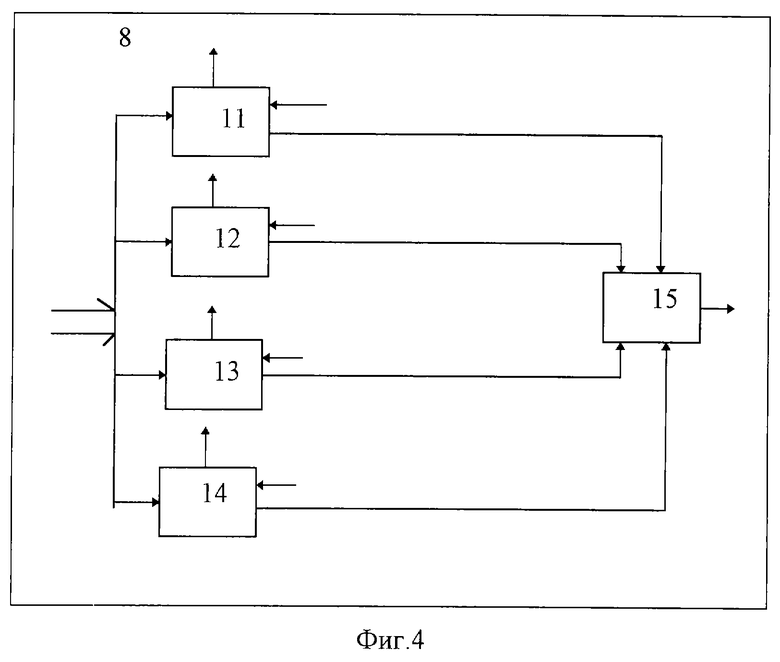
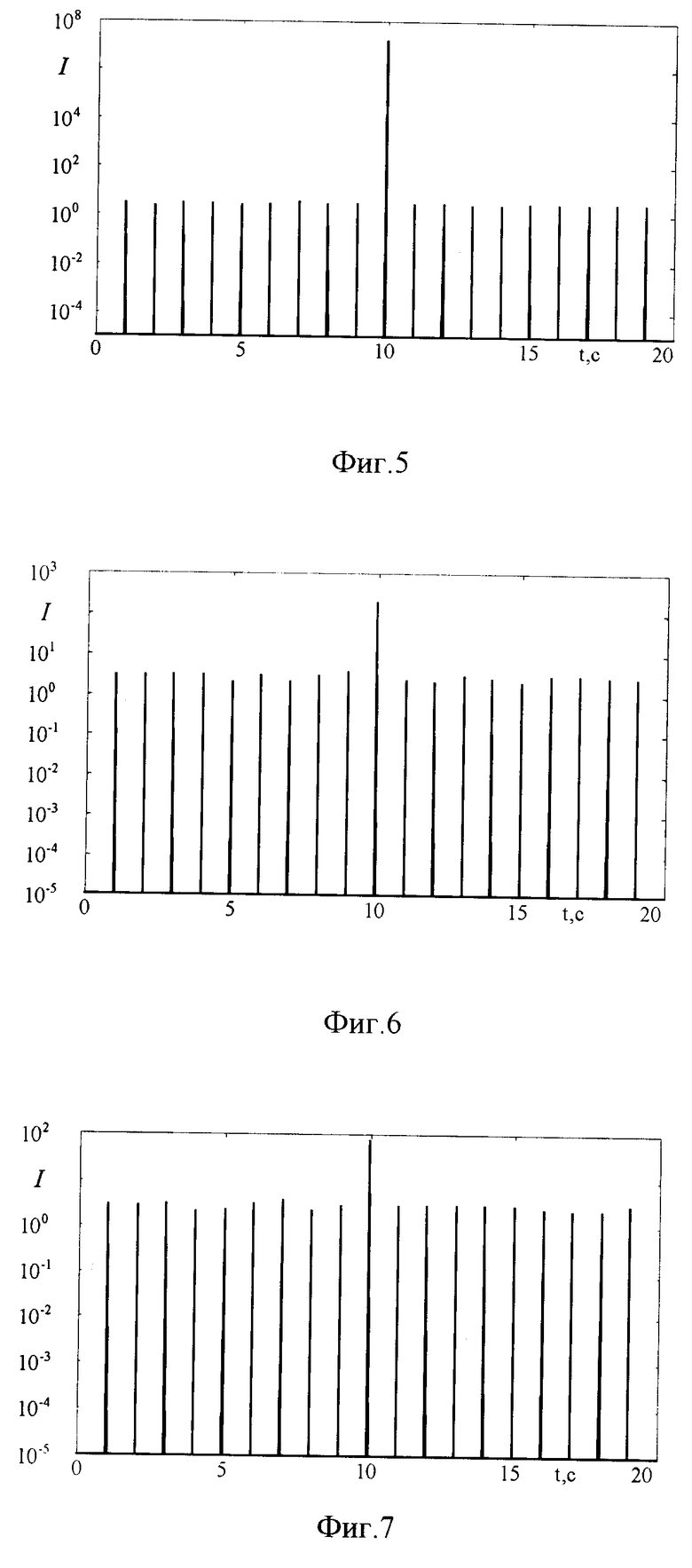

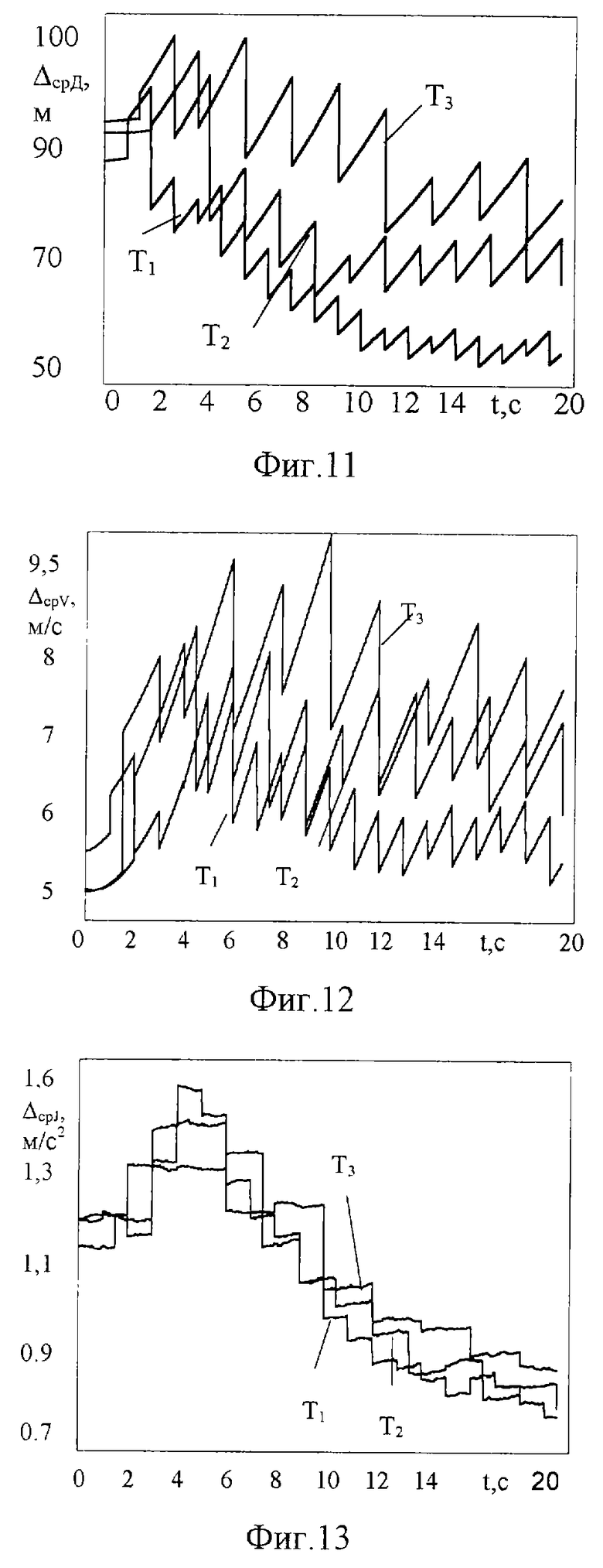
Изобретение заключается в измерении фазовых координат обнаруженных целей, завязке траекторий целей, экстраполяции фазовых координат целей, идентификации результатов измерений на принадлежность тем или иным экстраполируемым траекториям, коррекции оценок экстраполированных координат по результатам идентифицированных измерений, ранжировании целей по степени их опасности, сбросе траекторий сопровождаемых целей. При этом идентификация выполняется по минимальному значению квадратичного функционала качества, рассчитываемого для каждой из сопровождаемых траекторий, его минимизированное значение используется в дальнейшем для адаптации, либо вектора экстраполированных фазовых координат, либо матрицы коэффициентов усиления невязок, либо того и другого одновременно, а экстраполяция и коррекция экстраполированных значений фазовых координат по идентифицированным результатам радиолокационных измерений осуществляется по алгоритмам адаптивной аналогово-дискретной фильтрации. Достигаемым техническим результатом являются высокие показатели достоверности отождествления измерений, разрешающей способности РЛС, точности и устойчивости сопровождения маневрирующих целей, низкую вероятность сопровождения ложных и перепутывания траекторий. 16 ил.
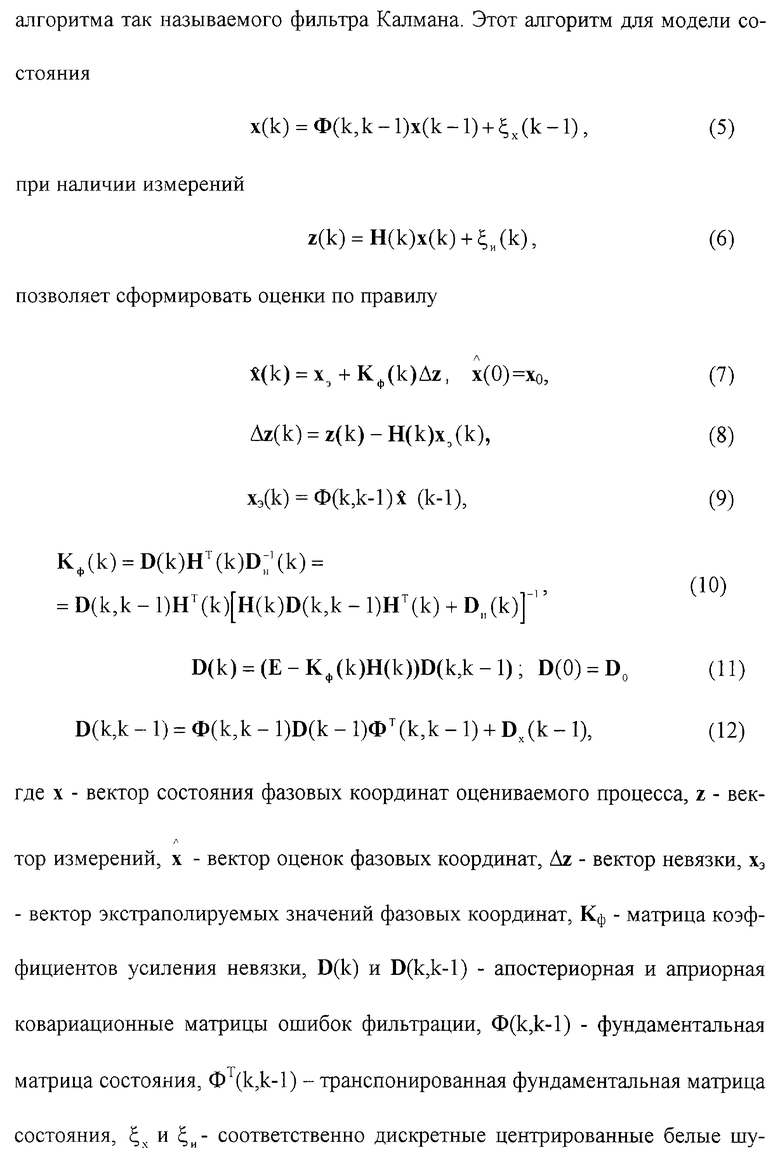
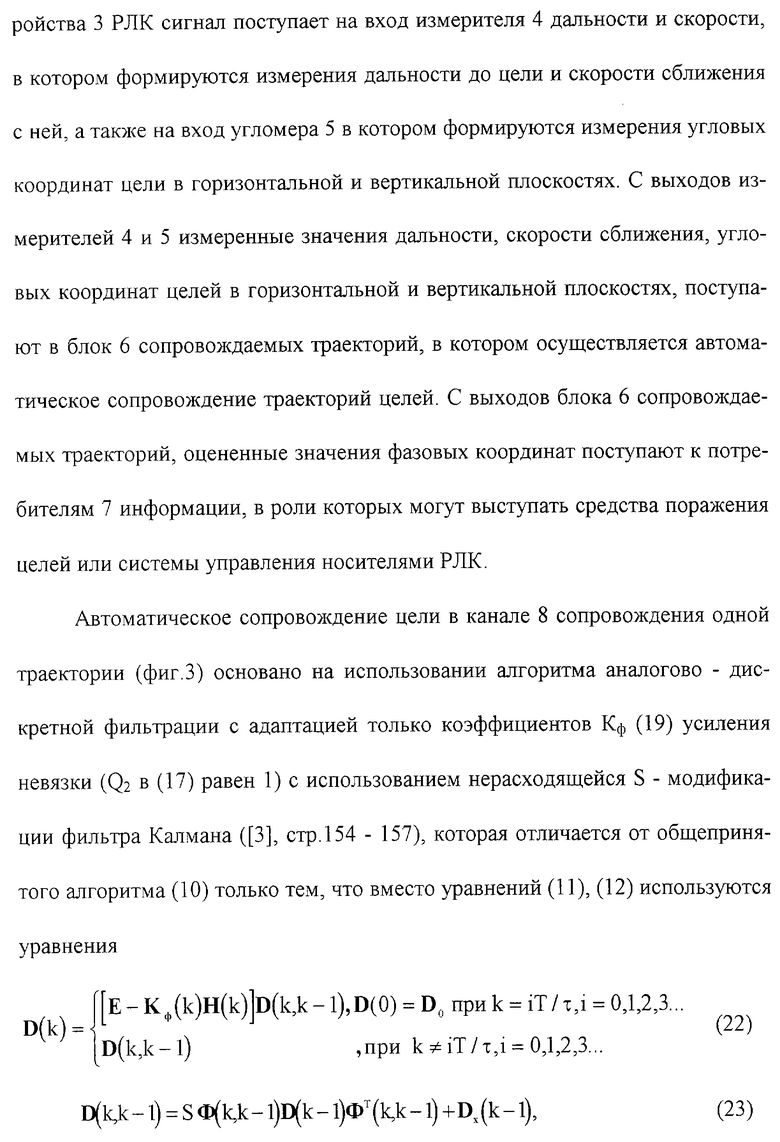
Способ автоматического сопровождения целей в режиме обзора, заключающийся в том, что последовательно измеряют фазовые координаты обнаруженных целей, осуществляют завязку траекторий обнаруженных целей, экстраполяцию фазовых координат сопровождаемых целей, идентификацию поступающих результатов измерений фазовых координат обнаруженных целей на предмет их принадлежности тем или иным сопровождаемым целям, коррекцию экстраполированных фазовых координат той сопровождаемой цели, которую определяют по результату идентификации, ранжирование сопровождаемых целей по степени их опасности, сброс с сопровождения тех целей, для которых отсутствует поступление измерений в течение заданного интервала времени, отличающийся тем, что идентификацию результатов измерений фазовых координат обнаруженных целей выполняют по минимальному значению функционала качества, определяемого для каждой из сопровождаемых целей соотношением
в котором I - функционал качества идентификации,
Рапрi и Pапсi - соответственно априорное и апостериорное значения параметров идентификации;
qi - весовые коэффициенты параметров идентификации;
N - количество параметров идентификации;
min - операция нахождения минимума, выполняемого в процессе перебора j-ых целей;
j - номер сопровождаемой цели,
при этом минимизированное значение функционала используют на этапе коррекции, либо для адаптации вектора экстраполируемых фазовых координат, либо для адаптации матрицы коэффициентов усиления невязок, либо адаптации того и другого одновременно, а экстраполяцию и коррекцию экстраполированных значений фазовых координат выполняют по правилам
xэ(k)=Q2(k)[Ф(k, k-1)xэ(k-1)],
Δz=Q1(k)[z(k)-H(k)xэ(k)],
Kф(k)=Q3(k)D(k)HT(k)Dи -1(k),
D(k)=(E-Kф(k)H(k)D(k, k-1), D(0)=D0,
D(k, k-1)=Ф(k, k-1)D(k-1)ФT(k, k-1)+Dx(k-1),
при описании модели состояния выражением
x(k) = Ф(k,k-1)×(k-1)+ξx(k-1)
по идентифицированным результатам измерений
z(k) = Q1(k)[H(k)×(k)+ξи(k)],
где
при адаптации вектора экстраполированных значений фазовых координат и Q2(k) = 1 при отсутствии адаптации вектора экстраполированных значений фазовых координат;
при адаптации матрицы коэффициентов усиления невязки и Q3(k) = 1 при отсутствии адаптации матрицы коэффициентов усиления невязки;
х - вектор фазовых координат; вектор оценок фазовых координат;
вектор оценок фазовых координат; вектор оценок фазовых координат при k = 0;
вектор оценок фазовых координат при k = 0;
х0 - значение вектора оценок фазовых координат при k = 0;
Ф (k, k-1) - фундаментальная матрица модели состояния;
ФТ (k, k-1) - транспонированная фундаментальная матрица модели состояния;
ξи и ξx - дискретные белые шумы измерений и состояния с известными ковариационными матрицами дисперсий Dи и Dх;
Dи -1 (k) - обратная ковариационная матрица дисперсий шумов измерений;
Т - период обращения к цели;
τ <<Т - интервал дискретизации;
D (k, k-1) и D (k) - априорная и апостериорная ковариационные матрицы ошибок фильтрации;
Н - матрица связи вектора фазовых координат х с вектором измерений z;
НТ - транспонированная матрица связи вектора фазовых координат х с вектором измерений z;
Кф - матрица коэффициентов усиления невязки Δz;
хэ - вектор экстраполированных фазовых координат;
Е - единичная матрица;
k, k-1 - моменты дискретизации;
Imin - минимизированное выбором j значение функционала качества идентификации;
f1 (Imin) и f2 (Imin) - функции, однозначно связанные с величиной минимизированного функционала качества идентификации;
D(0) - апостериорная ковариационная матрица ошибок фильтрации при k=0;
D0 - значение апостериорной ковариационной матрицы ошибок фильтрации при k=0;
Q1 - признак наличия измерений, равный единице в моменты поступления результатов измерений фазовых координат и равный нулю в другие моменты времени;
Q2 - признак адаптации вектора экстраполированных фазовых координат, равный f1(Imin) в моменты поступления идентифицированных измерений и равный единице в другие моменты при адаптации вектора экстраполированных фазовых координат и равный единице при отсутствии адаптации вектора экстраполированных фазовых координат;
Q3 - признак адаптации матрицы коэффициентов усиления невязки, равный f2(Imin) в моменты поступления идентифицированных измерений и равный единице в другие моменты при адаптации матрицы коэффициентов усиления невязки и равный единице при отсутствии адаптации матрицы коэффициентов усиления невязки.
| Фарина А., СТУДЕР Ф | |||
| Цифровая обработка радиолокационной информации | |||
| Сопровождение целей | |||
| Пер | |||
| с англ | |||
| - М.: Радио и связь, 1993, с.26-30, 160-178, 183-201 | |||
| RU 2052836 С1, 20.01.1996 | |||
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С АДАПТИВНЫМ ФИЛЬТРОМ | 1998 |
|
RU2148836C1 |
| US 5144316 А, 01.09.1992 | |||
| US 5289189 А, 22.02.1994 | |||
| МАШИНА ДЛЯ ВНЕСЕНИЯ ЖИДКИХ УДОБРЕНИЙ | 2001 |
|
RU2201060C2 |

