Изобретение относится к радиолокационным измерительным системам и предназначено для измерения параметров движения высокоскоростных воздушных объектов на больших расстояниях.
Траектория точечной цели представляет собой исчерпывающую пространственно-временную характеристику движения объекта. Однако в случае наблюдения за высокоскоростными объектами, двигающимися на большом удалении, из-за существенной временной задержки между зондирующим и ответным импульсами, построенные траектории не позволяют получить качественную экстраполяцию движения. Для уменьшения ошибки экстраполяции необходимо производить измерения гораздо чаще. Поэтому представляют интерес радиолокационные системы, способные адаптироваться к летно-тактическим характеристикам объекта путем формирования пачки зондирующих импульсов независимых от времени распространения сигнала от объекта и обратно. Это предполагает возможность формирования группы зондирующих импульсов соответствующих независимым измерительным каналам в одном измерительном цикле.
Для решения задач радиолокации применяются различные виды зондирующих сигналов: импульсные, непрерывные, с внутриимпульсной модуляцией и без таковой, одиночные, группы импульсов и пачечные импульсы (см. Радиолокационные системы: учебник / В. П. Бердышев, Е. Н. Гарин, А. Н. Фомин и др.; под ред. В. П. Бердышева; разраб.: Центр обучающих систем ИнТК СФУ. - Версия 1.0. - Электрон. дан. (4 Мб). - Красноярск : СФУ, 2012. - 402 с., стр. 33).
Однако при этом всегда предполагается их связанность для решения какой либо одной конкретной задачи.
Известен способ определения дальности и радиальной скорости в РЛС с импульсным излучением (см там же стр.144, 311), заключающийся в зондировании цели сигналом в виде пачки радиоимпульсов, приеме отраженной пачки радиоимпульсов и вычислении по значению запаздывания отраженной пачки и частоте заполнения радиоимпульсов этой пачки искомых параметров: дальности и радиальной скорости.
Недостаток способа заключается в том, что радиоимпульсы в пачке совершенно идентичны и, следовательно, не могут быть использованы для выделения соответствующих им независимых измерительных каналов.
Известен многополяризационный способ распознавания воздушных целей (см. Пат. RU № 2139553, МПК G01S 13/30, опубл. 10.10.1999), в соответствии с которым по направлению к цели излучаются группа радиоимпульсов с различными поляризационными отличиями, принимаются, усиливаются и детектируются отраженные от цели радиоимпульсы группы, а затем поочередно сравниваются по поляризационному признаку с эталонными.
Недостаток способа заключается в том, что радиоимпульсы с различными поляризационными отличиями не могут быть эффективно использованы для выделения соответствующих им независимых измерительных каналов. Потому как: во-первых, амплитуды отраженных сигналов с разной поляризацией могут существенно разниться в зависимости от свойств и формы объекта, во-вторых при отражении от объекта сигнал может сменить вид поляризации, и, в третьих, динамическое управление поляризацией на выходе приемо-передающих модулей антенных систем представляет собою достаточно трудно выполнимую задачу.
Наиболее близким по технической сущности является способ радиолокации (Пат.RU № 2413958, МПК G01S 13/30. опубл. 10.03.2011, бюл. № 7), согласно которому радиолокационным устройством в качестве зондирующего сигнала используется повторяющаяся группа импульсов из трех импульсов (А, В, С) разной длительности с фиксированными промежутками между импульсами. Импульсы кодируются таким образом, что короткий импульс А представляет собой сигнал непрерывных колебаний, более длинные импульсы (В, С) модулируются посредством частотной модуляции, причем импульс В представляет собой частотно-модулированный импульс с нелинейным увеличением частоты, а импульс С представляет собой частотно-модулированный импульс с нелинейным уменьшением частоты. После приема отраженного сигнала и преобразования его по частоте сигнал промежуточной частоты оцифровывается и подается на процессор. В процессоре оцифрованный импульсный сигнал подвергается операции фильтрации для импульса А и операции сжатия для импульсов В и С посредством выполнения преобразования Фурье и умножения на весовые коэффициенты сопряженного преобразования Фурье от точной копии переданных сигналов В и С. Затем выполняется обратное преобразование Фурье во временную область и сигнал подается на банк фильтров доплеровских частот, состоящих из N каналов, выполненных на основе взвешенного преобразования Фурье. Выходной сигнал каждого канала оценивается по критерию Неймана-Пирсона путем сравнения с соответствующим порогом и идентифицируется в качестве обнаруженных целей.
Недостаток заключается в том, что согласно этому способу формируемые радиоимпульсы не могут быть надежно идентифицированы с целью опознавания соответствующих им независимых измерительных каналов, если бы такие формировались. Кроме того предполагаемый диапазон скоростей объектов слежения накладывает ограничения на применение способа измерения частоты Доплера с помощью N-канального банка фильтров доплеровских частот, основанного на взвешенном преобразовании Фурье, который предлагается в способе прототипе. Суть ограничений в том, что для этого будет необходимо использовать слишком большое число каналов N-канального банка фильтров, либо потребуется согласиться с существенным снижением точности.
Задачей является обеспечение надежной идентификации зондирующих импульсов соответствующих каналов и увеличение точности определения радиальной скорости объекта.
Сущность изобретения заключается в том, что способ определения параметров движения высокоскоростного воздушного объекта, включающий формирование зондирующего сигнала в виде группы из трех радиоимпульсов с различным высокочастотным заполнением, излучение зондирующего сигнала в пространство и прием импульсного сигнала, преобразование его по частоте, усиление, оцифровывание, проведение операции фильтрации и оценивание по критерию Неймана-Пирсона путем сравнения с соответствующим порогом и идентифицирование в качестве обнаруженной цели. а по времени задержки определение расстояния до цели, при этом для кодировки радиоимпульсов одинаковой длительности используют в качестве заполнения однотоновую частотную модуляцию с индексами модуляции равными:  ,
,  и
и  соответственно для первого, второго и третьего измерительных каналов, при этом длительность зондирующих импульсов выбирают равной периоду модулирующего колебаний, а после приема отраженного сигнала, преобразования и усиления его подают на фазовый детектор и, отфильтровывая высокочастотные составляющие, выделяют два квадратурных сигнала:
соответственно для первого, второго и третьего измерительных каналов, при этом длительность зондирующих импульсов выбирают равной периоду модулирующего колебаний, а после приема отраженного сигнала, преобразования и усиления его подают на фазовый детектор и, отфильтровывая высокочастотные составляющие, выделяют два квадратурных сигнала:  ,
,  , из которых после оцифровки с помощью следящего окна формируют два массива
, из которых после оцифровки с помощью следящего окна формируют два массива  ,
,  ,
,  , вычисляют амплитудные отсчеты
, вычисляют амплитудные отсчеты  , формирующие импульсный сигнал и используют их для идентификации каналов по максимальному значению соответствующего признака:
, формирующие импульсный сигнал и используют их для идентификации каналов по максимальному значению соответствующего признака:
- первого канала  ;
;
- второго канала  ;
;
- третьего канала  ,
,  ,
,
где  - малая величина, исключающая деление на ноль,
- малая величина, исключающая деление на ноль,  ,
,  ,
,  - нулевая, первая и вторая спектральные составляющие соответствующих спектров, в то время как для измерения радиальной скорости заранее через прямое и обратное преобразования Фурье насчитывают матрицу значений для шести основных гармоник при условии отсутствия шума и равенства нулю частоты Доплера
- нулевая, первая и вторая спектральные составляющие соответствующих спектров, в то время как для измерения радиальной скорости заранее через прямое и обратное преобразования Фурье насчитывают матрицу значений для шести основных гармоник при условии отсутствия шума и равенства нулю частоты Доплера  ,
,  ,
,  , объединяют сигнальные квадратурные компоненты в единый нормированный комплексный сигнал
, объединяют сигнальные квадратурные компоненты в единый нормированный комплексный сигнал  и, аналогично, насчитывают матрицу значений для шести подобных основных гармоник, содержащих информацию о частотном сдвиге Доплера
и, аналогично, насчитывают матрицу значений для шести подобных основных гармоник, содержащих информацию о частотном сдвиге Доплера  , на основании полученных матриц для каждой основной гармоники рассчитывают модуль обобщенного фазового набега
, на основании полученных матриц для каждой основной гармоники рассчитывают модуль обобщенного фазового набега
 ,
,  , при этом для определения знака радиальной скорости расчет ведут по формуле
, при этом для определения знака радиальной скорости расчет ведут по формуле
 ,
,  ,
,
а радиальные скорости, соответствующие первому второму и третьему каналам определяют как:  ,
,  ,
,  , где
, где  - сопрягающие размерные коэффициенты.
- сопрягающие размерные коэффициенты.
Технический эффект заключается в обеспечении надежной идентификации зондирующих импульсов соответствующих каналов и увеличение точности определения радиальной скорости объекта.
Способ поясняется чертежами, где на
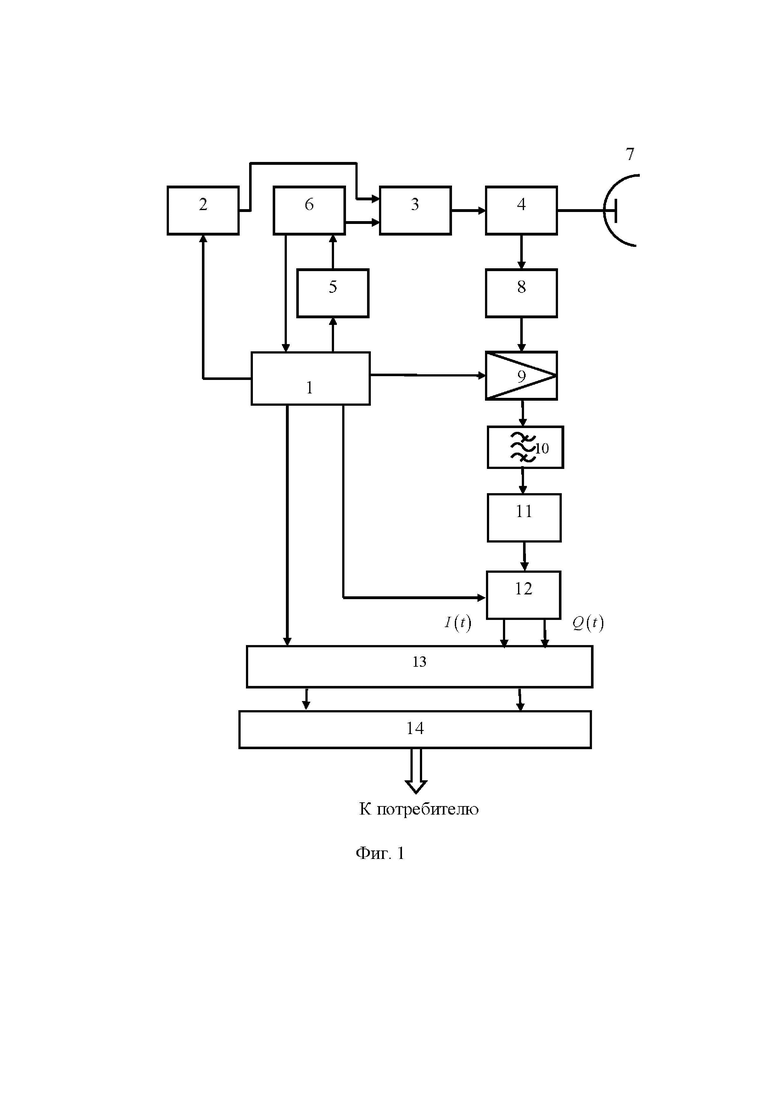
фиг. 1 показана схема устройства, реализующего предлагаемый способ.
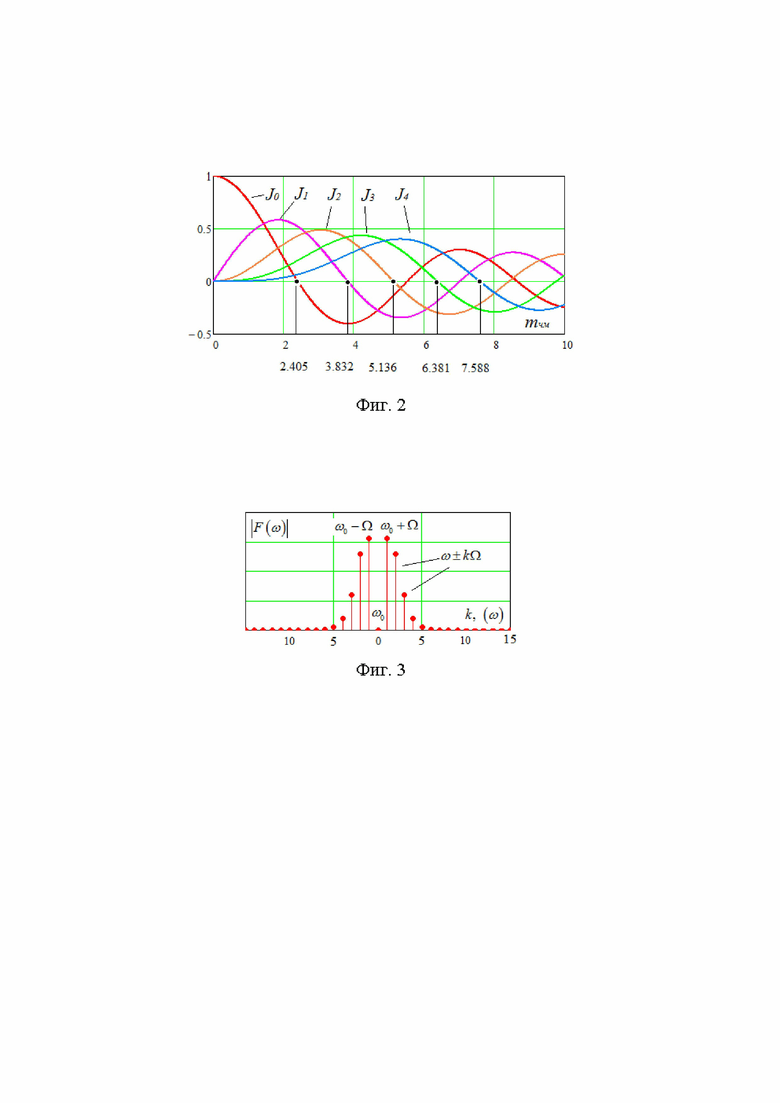
фиг. 2 показан характер поведения функций Бесселя различного порядка в зависимости от аргумента - индекса модуляции  .
.
фиг. 3 показан спектр радиосигнала с индекса модуляции  ;
;
фиг. 4 показан спектр радиосигнала с индекса модуляции  ;
;
фиг. 5 показан спектр радиосигнала с индекса модуляции  ;
;
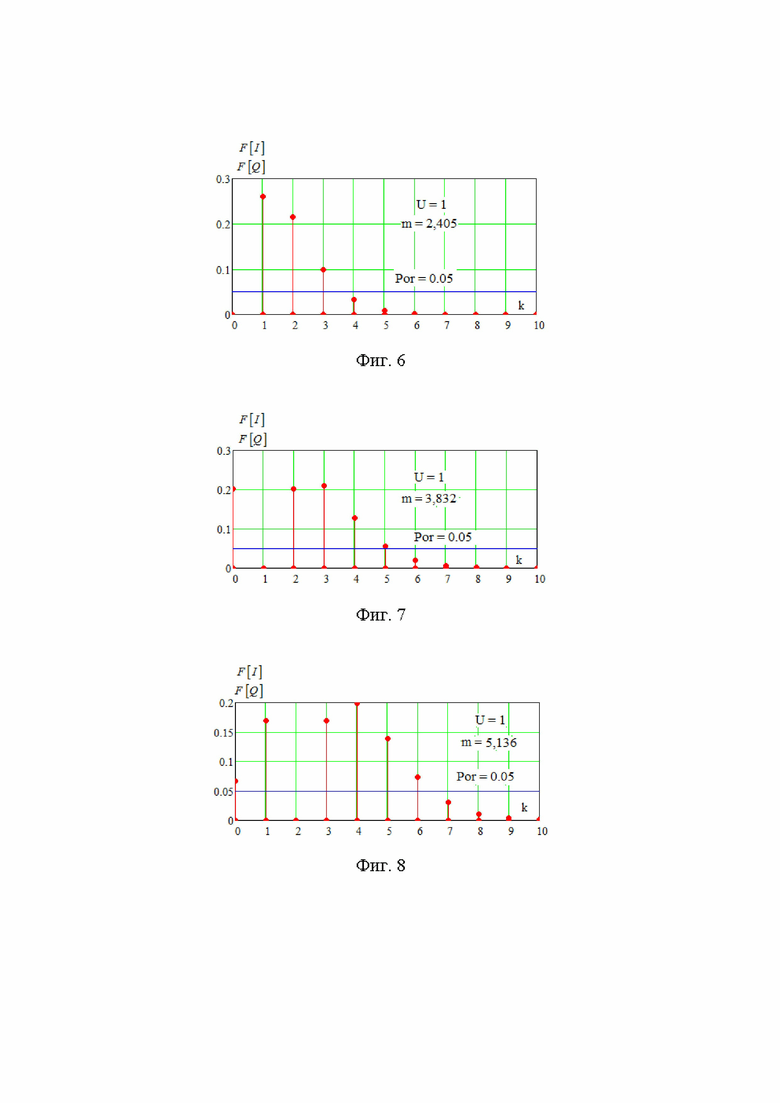
фиг. 6 показан спектр квадратурных сигналов при  на выходе фазового детектора;
на выходе фазового детектора;
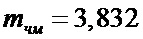
фиг. 7 показан спектр квадратурных сигналов при  на выходе фазового детектора;
на выходе фазового детектора;
фиг. 8 показан спектр квадратурных сигналов при  на выходе фазового детектора.
на выходе фазового детектора.
Способ определения параметров движения высокоскоростного воздушного объекта включает следующие операции:
- формируют зондирующий сигнал в виде группы из трех импульсов - 1;
- каждый импульс кодируют однотоновой частотной модуляцией с индексами модуляции равными:  ,
,  ,
,  соответственно для первого, второго и третьего измерительных каналов. При этом длительность зондирующих импульсов выбирают равной периоду модулирующего колебания - 2;
соответственно для первого, второго и третьего измерительных каналов. При этом длительность зондирующих импульсов выбирают равной периоду модулирующего колебания - 2;
- принятый отраженный сигнал преобразуют по частоте - 3;
- сигнал промежуточной частоты усиливают - 4;
- усиленный сигнал промежуточной частоты подают на синхронный детектор и, отфильтровывая высокочастотные составляющие, выделяют два квадратурных сигнала  ,
,  - 5;
- 5;
- квадратурные сигналы оцифровывают, подвергают операции фильтрации и с помощью операции скользящее окно длительностью равной длительности периода модулирующего колебания  формируют соответствующие квадратурные цифровые последовательности
формируют соответствующие квадратурные цифровые последовательности  ,
,  - 6;
- 6;
- формируют амплитудные отсчеты, образующие импульсный сигнал - 7;
- импульсный сигнал оцениванию по критерию Неймана-Пирсона путем сравнения с соответствующим порогом и идентифицируют в качестве обнаруженной цели, а по времени его задержки определяют расстояние до цели  - 8;
- 8;
- амплитудные отсчеты используют для идентификации каналов по максимальному значению соответствующего признака:
- первого канала ;
- второго канала ;
- третьего канала , - 10,
где - малая величина, исключающая деление на ноль, , , - нулевая, первая и вторая спектральные составляющие соответствующих спектров;
- для измерения радиальной скорости заранее через прямое и обратное преобразования Фурье насчитывают матрицу значений для шести основных гармоник при условии отсутствия шума и равенства нулю частоты Доплера , , . Объединяют сигнальные квадратурные компоненты в единый нормированный комплексный сигнал . Аналогично, насчитывают матрицу значений для шести подобных основных гармоник, содержащих информацию о частотном сдвиге Доплера . На основании полученных матриц для каждой основной гармоники рассчитывают модуль обобщенного фазового набега
, , при этом для определения знака радиальной скорости расчет ведут по формуле
, ;
- радиальные скорости, соответствующие первому второму и третьему каналам определяют как:
, , ,
где - сопрягающие размерные коэффициенты.
Структурная схема устройства, осуществляющего Способ определения координат цели высокоскоростных воздушных объектов, приведена на фиг. 1 (возможный вариант выполнения).
Устройство по фиг.1 содержит:
- синтезатор частот - 1;
- формирователь группы импульсов - 2;
- усилитель мощности - 3;
- переключатель прием-передача - 4;
- цепь частотной модуляции - 5;
- задающий генератор - 6;
- радиолокационная антенна - 7;
- усилитель высокой частоты - 8;
- преобразователь частоты - 9;
- полосовой фильтр - 10;
- усилитель промежуточной частоты - 11;
- фазовый детектор - 12;
- АЦП - 13;
- процессор - 14.
При этом устройство содержит синтезатор частот 1, первый выход которого последовательно соединен по входу и выходу с формирователем группы импульсов 2, усилителем мощности 3 и переключателем прием-передача 4, второй выход синтезатора частот 1 так же последовательно по входу и выходу соединен с цепью частотной модуляции 5, задающим генератором 6 и вторым входом усилителя мощности 3, при этом второй выход задающего генератора 6 по цепи обратной связи соединен с входом синтезатора частот 1, в то время как вход-выход переключателя прием-передача 4 соединен с радиолокационной антенной 7, а выход переключателя прием-передача 4 по входу и выходу последовательно соединен с усилителем высокой частоты 8, преобразователем частоты 9, полосовым фильтром 10, усилителем промежуточной частоты 11 и первым входом фазового детектора 12, при этом второй вход преобразователя частоты 9 соединен с третьим выходом синтезатором частоты 1, четвертый и пятый выходы которого соответственно соединены с первым входом АЦП 13 и вторым входом фазового детектора 12, квадратурные выходы которого соединены со вторым и третьим входами АЦП 13, а выходы которого в свою очередь соединены с входами процессора 13, выход последнего является цепью вывода информации потребителю.
Рассмотрим работу устройства. Под управлением синтезатора частот 1 формирователь группы импульсов 2 формирует зондирующий сигнал в виде группы из трех импульсов. Каждый импульс соответствует своему измерительному каналу. Также под управлением синтезатора частот 1 с помощью цепи частотной модуляции 5 и задающего генератора 6 формируется радиочастотное заполнение зондирующих импульсов с однотоновой частотной модуляцией соответственно с индексами модуляции равными:  ,
,  ,
,  для каждого измерительного канала. Зондирующие импульсы и их радиочастотное заполнение подают на входы усилителя мощности 3. Синхронность работы задающего генератора 6 и формирователя группы импульсов 2 обеспечивается за счет цепи обратной связи со второго выхода генератора 6 на вход синтезатора частот 1. С помощью усилителя мощности 3 и сигналов, поступающих на его входы, формируются мощные радиочастотные зондирующие импульсы, которые через переключатель прием-передача подают в антенну 7 и излучают в пространство в заданном направлении.
для каждого измерительного канала. Зондирующие импульсы и их радиочастотное заполнение подают на входы усилителя мощности 3. Синхронность работы задающего генератора 6 и формирователя группы импульсов 2 обеспечивается за счет цепи обратной связи со второго выхода генератора 6 на вход синтезатора частот 1. С помощью усилителя мощности 3 и сигналов, поступающих на его входы, формируются мощные радиочастотные зондирующие импульсы, которые через переключатель прием-передача подают в антенну 7 и излучают в пространство в заданном направлении.
Принятые антенной 7 отраженные радиоимпульсы через переключатель прием-передача 4 и усилитель высокой частоты 8 поступают на преобразователь частоты 9, на второй вход которого от синтезатора частот 1 поступает сигнал гетеродина. Сигнал промежуточной частоты с выхода преобразователя частоты 9 через полосовой фильтр 10 поступает на вход усилителя промежуточной частоты 11, где происходит основное усиление сигнала. Усиленный сигнал промежуточной частоты с усилителя промежуточной частоты 11 и опорный сигнал с выхода синтезатора частот 1 подают на фазовый детектор 12, где формируются квадратурные компоненты, поступающие на АЦП 13, где производят оцифровку этих сигналов с дискретностью определяемой частотой сигнала дискретизации поступающего с синтезатора частот 1. Оцифрованные данные квадратурных компонент подают в процессор 14, где производят окончательную обработку цифровой последовательности. С выхода процессора 14 обработанные данные поступают потребителю.
Рассмотрим обоснование предлагаемого способа определения параметров движения высокоскоростного воздушного объекта радиолокаторами дальнего обнаружения.
В импульсных радиолокаторах для измерения дальности  используется метод основанный на измерении времени задержки
используется метод основанный на измерении времени задержки  зондирующего импульса:
зондирующего импульса:  ,
,  - скорость света. Точность измерения дальности может характеризоваться потенциальной ошибкой, зависящей от отношения «сигнал/шум», и систематической ошибкой, определяемой частотой следования тактовых (измерительных) импульсов, по количеству которых между заданными моментами времени измеряется длительность интервала задержки. В соответствии с рекомендациями ИКАО (ICAO Annex 10 - Volume 4. Aeronautical Telecommunications - Surveillance and Collision Avoidance Systems, Topic 4.3.2.1.3 Range and Bearing Accuracy, (Bundesamt für Zivilluftfahrt, Schweiz) для радиолокаторов системы управления воздушным движением размер дискрета дальности, определяющий аппаратную ошибку, должен быть не более 1/128 морской мили, то есть около 14,5 м, что соответствует интервалу времени дискретизации приблизительно 10 нс. Потенциальная точность измерения дальности не должна быть хуже допускаемой аппаратной ошибки. Считается, что оптимальным выбором характеристик радиолокатора является такой выбор, при котором эти ошибки соизмеримы. Величина потенциальной точности для отношений «сигнал-шум», значительно больших единицы, дается следующей формулой (G. Richard Curry: ''Radar System Performance Modeling'' 2005, ISBN 978-1-58053-816-9, S.168, Ширман Я.Д. Теоретические основы радиолокации. - М.: «СОВЕТСКОЕ РАДИО», 1970. - 560 с., стр. 223):
- скорость света. Точность измерения дальности может характеризоваться потенциальной ошибкой, зависящей от отношения «сигнал/шум», и систематической ошибкой, определяемой частотой следования тактовых (измерительных) импульсов, по количеству которых между заданными моментами времени измеряется длительность интервала задержки. В соответствии с рекомендациями ИКАО (ICAO Annex 10 - Volume 4. Aeronautical Telecommunications - Surveillance and Collision Avoidance Systems, Topic 4.3.2.1.3 Range and Bearing Accuracy, (Bundesamt für Zivilluftfahrt, Schweiz) для радиолокаторов системы управления воздушным движением размер дискрета дальности, определяющий аппаратную ошибку, должен быть не более 1/128 морской мили, то есть около 14,5 м, что соответствует интервалу времени дискретизации приблизительно 10 нс. Потенциальная точность измерения дальности не должна быть хуже допускаемой аппаратной ошибки. Считается, что оптимальным выбором характеристик радиолокатора является такой выбор, при котором эти ошибки соизмеримы. Величина потенциальной точности для отношений «сигнал-шум», значительно больших единицы, дается следующей формулой (G. Richard Curry: ''Radar System Performance Modeling'' 2005, ISBN 978-1-58053-816-9, S.168, Ширман Я.Д. Теоретические основы радиолокации. - М.: «СОВЕТСКОЕ РАДИО», 1970. - 560 с., стр. 223):
 , (1)
, (1)
где  - полоса пропускания;
- полоса пропускания;
 - отношение сигнал/шум.
- отношение сигнал/шум.
Снижения случайной ошибки за счет флюктуации фазы и амплитуды может быть достигнуто, если измерения проводят на нескольких статистически независимых несущих частотах отраженных сигналов (Ширман Я.Д. Теоретические основы радиолокации. - М.: «СОВЕТСКОЕ РАДИО», 1970. - 560 с., стр. 223? стр. 271). При этом дополнительный выигрыш достигается, если используют комбинированный способ обработки многочастотного сигнала, включающий линейное сложение, среднеквадратическое сложение и отбор амплитуд по максимуму (Там же. Стр. 273, 274).
Измерение радиальной скорости  производится путем использования эффекта Доплера. Проблема увеличения точности определения радиальной скорости объекта по этому способу здесь решена путем использования синхронного режима работы РЛС.
производится путем использования эффекта Доплера. Проблема увеличения точности определения радиальной скорости объекта по этому способу здесь решена путем использования синхронного режима работы РЛС.
Если проекция вектора скорости объекта слежения на радиус вектор системы наблюдения во времени не изменяется, т.е. процесс перемещения объекта соответствует закону равномерного движения, то точность измерения радиальной скорости определяется точностью измерения доплеровской частоты. Если предположить, что измеритель частоты построен на основе процедуры преобразования Фурье, то учитывая, что разрешающая способность по частоте при этом будет  , точность измерения частоты составит (Фомин, А.Н. Теоретические и физические основы радиолокации и специального мониторинга: учебник / А.Н. Фомин, В.Н. Тяпкин, Д.Д. Дмитриев и др.; под. ред. И.Н. Ищука. - Красноярск: Сиб. федер. ун-т, 2016. - 292 с. Стр. 88)
, точность измерения частоты составит (Фомин, А.Н. Теоретические и физические основы радиолокации и специального мониторинга: учебник / А.Н. Фомин, В.Н. Тяпкин, Д.Д. Дмитриев и др.; под. ред. И.Н. Ищука. - Красноярск: Сиб. федер. ун-т, 2016. - 292 с. Стр. 88)
 ,
,
т.е. точность измерения радиальной скорости будет равна
 , (2)
, (2)
где  - длительность интервала наблюдения;
- длительность интервала наблюдения;
 - несущая частота.
- несущая частота.
В заявляемом способе выше перечисленные принципы и показатели качества являются основополагающими и используются при идентификации измерительных каналов, измерении дальности до объекта слежения и измерении радиальной скорости.
В связи с этим для получения многочастотного зондирующего сигнала используем частотную модуляцию (ЧМ) несущей однотоновым гармоническим колебанием. Для ЧМ сигнала характерно то, что под знаком косинуса должна быть переменная с размерностью фазы. Круговая частота - это скорость изменения фазы. Для того чтобы получить выражение для фазы скорость интегрируют. В результате выражение для частотно-модулированного зондирующего сигнала запишется как

 (3)
(3)
где  - девиация частоты.
- девиация частоты.
Если модулирующий сигнал  - синусоида, то получают:
- синусоида, то получают:
 (4)
(4)
где  - индекс частотной модуляции;
- индекс частотной модуляции;
 - циклическая частота модулирующего сигнала,
- циклическая частота модулирующего сигнала,  - частота.
- частота.
Суть синхронной работа радиолокатора в том, что  , где
, где  - целое число, а
- целое число, а  - длительность зондирующего импульса. В дальнейшем будем полагать
- длительность зондирующего импульса. В дальнейшем будем полагать  .
.
Спектр такого ЧМ сигнала получают разложением (4) в тригонометрический ряд. Для этого представляют (4) в виде:
 . (5)
. (5)
Функции  и
и  являются периодическими и, следовательно могут быть представлены разложением в ряды по функциям Бесселя первого рода
являются периодическими и, следовательно могут быть представлены разложением в ряды по функциям Бесселя первого рода  -го порядка
-го порядка  , зависящими от аргумента
, зависящими от аргумента  (Коренев, Б.Г. Введение в теорию Бесселевых функций / Б.Г. коренев. - М.: «Наука», 1970. - 288 с., стр. 35):
(Коренев, Б.Г. Введение в теорию Бесселевых функций / Б.Г. коренев. - М.: «Наука», 1970. - 288 с., стр. 35):
 ,
,
 .
.
В результате формула (5) сведется к тригонометрическому ряду:
 (6)
(6)
Или в более компактном виде:
 (7)
(7)
Из (5) видно. что спектр однотонового ЧМ сигнала бесконечный и симметричный относительно частоты несущего колебания. Амплитуды гармоник пропорциональны значениям функций Бесселя первого рода k-порядка:  ,
,  ,
,  , …
, …  …. Аргументом функций Бесселя является индекс модуляции, а порядок
…. Аргументом функций Бесселя является индекс модуляции, а порядок  равен номеру боковой гармоники. Таким образом, значения амплитуд гармоник в спектре определяются характером поведения функций Бесселя различного порядка в зависимости от аргумента - индекса модуляции . Эта зависимость иллюстрируется фиг. 2.
равен номеру боковой гармоники. Таким образом, значения амплитуд гармоник в спектре определяются характером поведения функций Бесселя различного порядка в зависимости от аргумента - индекса модуляции . Эта зависимость иллюстрируется фиг. 2.
При значениях индекса модуляции  равных 2,405; 3,832; 5,136 (см. фиг. 2) функции Бесселя порядка
равных 2,405; 3,832; 5,136 (см. фиг. 2) функции Бесселя порядка  обращается в нуль. И это означает, что в спектре ЧМ колебания отсутствуют гармоники в соответствующих спектрах на частотах
обращается в нуль. И это означает, что в спектре ЧМ колебания отсутствуют гармоники в соответствующих спектрах на частотах  (см. фиг. 3, 4, 5).
(см. фиг. 3, 4, 5).
Полосу частот, в которой в основном сосредоточен спектр ЧМ-колебания при широкополосной частотной модуляции вычисляют по формуле  (Гоноровский, И.С. Радиотехнические цепи и сигналы. - М.: «Сов. радио», 1977. - 608 с., стр. 107). Как видно из фиг. 3…5 максимальная ширина спектра соответствует максимальному индексу модуляции.
(Гоноровский, И.С. Радиотехнические цепи и сигналы. - М.: «Сов. радио», 1977. - 608 с., стр. 107). Как видно из фиг. 3…5 максимальная ширина спектра соответствует максимальному индексу модуляции.
Отраженный от объекта радиосигнал испытывает влияние эффекта Доплера. Причем каждая из отраженных спектральных составляющих является статистически независимой и в случае наблюдения за подвижным объектом приобретает собственный частотный сдвиг.
На приемной стороне в процессе конечной обработки зондирующих сигналов после преобразования по частоте и усиления удобно использовать принцип прямого преобразования частоты (спектр преобразуется в односторонний с уменьшением количества спектральных составляющих), для чего сигнал подвергают фазовому детектированию. Т.е. производят преобразования, которые аналитически могут быть описаны следующим образом:
 (8)
(8)
 (9)
(9)
где  - квадратурные компоненты;
- квадратурные компоненты;
 - амплитуда сигнала на промежуточной частоте
- амплитуда сигнала на промежуточной частоте  .
.
Так как
 ;
;
 ;
;
 ,
,
отфильтровав высокочастотные составляющие, получают:
 , (10)
, (10)
 . (11)
. (11)
Корень из суммы квадратов полученных квадратур определяет амплитуду сигнала на выходе фазового детектора:
 . (12)
. (12)
Таким образом, это импульсный сигнал с амплитудой  и длительностью
и длительностью  .
.
Обнаружение отклика на зондирующий импульс. После оцифровки сигнала и, выделения выборки данных с помощью скользящего окна с длительностью равной длительности периода модулирующего колебания  , формируют массивы квадратурных данных:
, формируют массивы квадратурных данных:
 ,
,
где  - дискретные моменты времени,
- дискретные моменты времени,  ;
;
 - число дискретных отсчетов, размещенных внутри скользящего окна длительностью -
- число дискретных отсчетов, размещенных внутри скользящего окна длительностью -  ,
,  ,
,  - целое число;
- целое число;
 - интервал дискретизации,
- интервал дискретизации,  - частота дискретизации.
- частота дискретизации.
Так как зондирующий сигнал и его отклик представляют собой импульсы с длительностью  равной длительности интервала наблюдения это позволяет для оценки измерительного цикла
равной длительности интервала наблюдения это позволяет для оценки измерительного цикла  использовать алгоритм оптимального обнаружителя по критерию Неймана-Пирсона (Елисеев, А.А. Теоретические основы телекоммуникационных систем / Под ред. Косогора А.А. - М.: ФИЗМАТЛИТ, 2023. - 448 с., стр.133) и определить расстояние до объекта слежения: . Процедура обнаружения предполагает выполнение следующих операций:
использовать алгоритм оптимального обнаружителя по критерию Неймана-Пирсона (Елисеев, А.А. Теоретические основы телекоммуникационных систем / Под ред. Косогора А.А. - М.: ФИЗМАТЛИТ, 2023. - 448 с., стр.133) и определить расстояние до объекта слежения: . Процедура обнаружения предполагает выполнение следующих операций:
- выделение с помощью скользящего окна длительностью  цугов колебаний
цугов колебаний  и
и  ;
;
- в момент прихода отклика формирование сигнала в виде импульса с амплитудой  и длительностью на выходе фазового детектора -
и длительностью на выходе фазового детектора -  ;
;
- интегрирование выделенного импульса в течение времени  ;
;
- сравнение результата интегрирования с порогом соответствующем критерию Неймана- Пирсона.
Потенциально достижимая точность измерения дальности при этом составит:
 , (13)
, (13)
что в  раз лучше, чем при радиоимпульсе длительностью
раз лучше, чем при радиоимпульсе длительностью  с немодулированным радиочастотным заполнением.
с немодулированным радиочастотным заполнением.
Идентификация каналов. По аналогии с ранее выполненной операцией над выражением (5) выражения (10) и (11) так же могут быть представлены разложением в ряды по функциям Бесселя первого рода  -го порядка
-го порядка  , зависящими от аргумента
, зависящими от аргумента  . Выражения для квадратурных компонент будут иметь вид:
. Выражения для квадратурных компонент будут иметь вид:
 (14)
(14)
 (15)
(15)
При радиальной скорости равной нулю  у сигнала
у сигнала  сохранятся только действительные части четных гармоник модулирующей частоты
сохранятся только действительные части четных гармоник модулирующей частоты  . У сигнала
. У сигнала  - действительные части нечетных гармоник
- действительные части нечетных гармоник  . Если частота Доплера не равна нулю:
. Если частота Доплера не равна нулю:  , то в каждом из квадратурных сигналов будут присутствовать действительные и мнимые части всех гармоник, причем функционально связанные через функцию синус или косинус с частотой Доплера. Эта особенность позволяет оценивать значение этой частоты.
, то в каждом из квадратурных сигналов будут присутствовать действительные и мнимые части всех гармоник, причем функционально связанные через функцию синус или косинус с частотой Доплера. Эта особенность позволяет оценивать значение этой частоты.
От каждого из массивов квадратурных составляющих  и
и  берут преобразование Фурье:
берут преобразование Фурье:  .
.
Из (14) и (15)) видно, что амплитуды гармоник квадратурных компонент в спектрах при однотоновой ЧМ на выходе фазового детектора с ростом частоты убывают, т.к. значения их амплитуд определяются характером поведения функций Бесселя, порядок которых растет пропорционально с ростом частоты гармоники. Это же хорошо видно по спектрам квадратурных сигналов, представленных на фиг. 6, 7, 8.
Малость высших гармоник позволяет ограничиться несколькими низкочастотными гармониками, которые назовем основными. Т.е. к основным отнесем гармоники, приведенные амплитуды которых превышают некоторый условный порог в канале и в совокупности несут большую часть энергии сигнала (см. фиг. 6, 7, 8):
 , (16)
, (16)
где  - обозначает преобразование Фурье над произвольной функцией;
- обозначает преобразование Фурье над произвольной функцией;
 - амплитуда
- амплитуда  -й гармоники в спектре.
-й гармоники в спектре.
Как и ранее при выборе индексов модуляции  функции Бесселя соответственно порядка
функции Бесселя соответственно порядка  обращаются в нуль. И это означает, что в спектрах квадратур будут отсутствовать соответствующие им спектральные составляющие.
обращаются в нуль. И это означает, что в спектрах квадратур будут отсутствовать соответствующие им спектральные составляющие.
Используем этот признак для идентификации каналов. Для этого для каждого канала составляют отношения и численно интегрируют:
- для первого канала: ;
- для второго канала: ;
- для третьего канала: , , (17)
где - малая величина, исключающая деление на ноль.
Принадлежность отклика на зондирующий импульс каналу определяется путём сопоставления признаков  . Отклик будет принадлежать каналу с максимальным значением признака.
. Отклик будет принадлежать каналу с максимальным значением признака.
Измерение радиальной скорости. Ранее проведенный анализ соотношений (14) и (15) показал, что в случае не равенства нулю частоты Доплера в квадратурных сигналах формируются все гармоники, причем каждая из них функционально связанна через функцию синус или косинус с частотой Доплера. При этом энергия четных гармоник у сигнала перекачивается в энергию нечетных ранее отсутствующих гармоник. Аналогично для квадратурной составляющей , где энергия нечетных гармоник перекачивается в энергию четных. Замечено, что количество перекачанной энергии пропорционально значению частоты Доплера, т.е. радиальной скорости. Отсюда процесс измерения радиальной скорости может быть построен следующим образом:
Заранее через прямое и обратное преобразования Фурье насчитывают матрицу значений для шести основных гармоник при условии отсутствия шума и равенства нулю частоты Доплера:
, , . (18)
где  - опорный сигнал
- опорный сигнал
Объединяют сигнальные квадратурные компоненты в единый нормированный комплексный сигнал .
Аналогичным образом, используя нормированный комплексный сигнал, насчитывают матрицу значений для шести подобных основных гармоник, но содержащих информацию о частотном сдвиге Доплера:
. (19)
Для каждой основной гармоники рассчитывают модуль обобщенного фазового набега:
, . (20)
Очевидно, что при таком измерении фазового набега теряется информация о его знаке. Для восстановления информации о знаке радиальной скорости используют данные матриц  и
и  только для перовых двух гармоник. Расчет ведут по формуле:
только для перовых двух гармоник. Расчет ведут по формуле:
, . (21)
При расчете радиальной скорости в каналах учитывают только те гармоники, которые в канале являются основными:
- для первого канала ;
- для второго канала ;
- для третьего канала , (22)
где - сопрягающие размерные коэффициенты,  .
.
Значения коэффициентов найдены методом регрессии по результатам численных экспериментов.
Для ускорения процессов вычисления гармоник  и спектральных составляющих
и спектральных составляющих  и
и  не обязательно вычислять через БПФ весь спектр. Достаточно проводить вычисления только для значимых гармоник и спектральных составляющих по формулам:
не обязательно вычислять через БПФ весь спектр. Достаточно проводить вычисления только для значимых гармоник и спектральных составляющих по формулам:
 ,
,  ,
,  . (23)
. (23)
Для иллюстрации достигаемого технического эффекта в таблицах 1 -4 приведены результаты моделирования, выполненного в среде MathCad.
 м/с;
м/с;
Частота несущего колебания  Гц;
Гц;
Промежуточная частота  Гц;
Гц;
Амплитуда  ;
;
Длительность импульса  с;
с;
Частота модуляции  Гц;
Гц;
Количество отсчетов  ;
;
Дискрет времени  с;
с;
Радиальная скорость  , м/с
, м/с
Индексы частотной модуляции 
 (задан третий канал)
(задан третий канал)
Уровень шума  (При каждой смене радиальной скорости формируется новая выборка шумовой компоненты
(При каждой смене радиальной скорости формируется новая выборка шумовой компоненты  )
)
Расчетная фориула для h-ой гармоники 
Цифрованная прямая компонента на выходе ФД 
Оцифрованная квадратурная компонента 
Опорный сигнал 
Ответный импульс 
Амплитуда импульса 
Интегрирование импульса 
Максимум соответствует положению заднего фронта
Идентификационный признак первого канала ,
, 
Идентификационный признак второго канала ,
, 
Идентификационный признак третьего канала ,
, 

Ответный импульс пришел по третьему каналу
Опорные гармоники 
Основные гармоники 
Расчет обобщенных фаз
Индексы основных гармоник при расчете знака
Расчет знака


Радиальная скорость - второй канал
Радиальная скорость - третий канал
Допущенные шибки измерения радиальной скорости по третьему каналу
- абсолютная
- относительная ошибка
сигнал/шум (SNR), дБ при
при  ,
, 
 , м
, м
 с
с
2,344 м
«+» - ошибки идентификации не наблюдались;
«-» - наблюдались ошибки идентификации.
 , м/с
, м/с
Как видно из текста (формула 13) и данных таблицы 2 при использовании решений, предлагаемых в способе определения параметров движения высокоскоростного воздушного объекта, потенциальная точность определения расстояния в раз лучше, чем при варианте с радиоимпульсом той же длительности с немодулированным радиочастотным заполнением. Достигаемая точность удовлетворяет требованиям ИКАО. В тоже время в соответствии с данными таблицы 5 точность измерения радиальной скорости по предлагаемому способу гораздо в меньшей степени зависит от уровня шумов по отношению к классическому способу определения радиальной скорости доплеровским методом при котором потенциальная точность определяется точностью измерения доплеровской частоты. При отношении сигнал/шум ниже 50 дБ классический способ теряет работоспособность. В то время как в соответствии с предлагаемым способом сохраняется удовлетворительная точность измерения вплоть до отношения сигнал/шум 12 дБ.
Анализ таблицы 3 показывает, что способ обеспечивает достаточно надежную идентификацию каналов вплоть до отношения сигнал/шум 10 дБ. Т.е. работоспособность системы сохраняется вплоть до уровня шума сопоставимого с уровнем сигнала.
Следовательно, заявленный технический эффект - обеспечение надежной идентификации зондирующих импульсов соответствующих каналов и увеличение точности определения радиальной скорости объекта достигается.
Библиографические данные
1 Радиолокационные системы: учебник / В. П. Бердышев, Е. Н. Гарин, А. Н. Фомин [и др.]; под ред. В. П. Бердышева; разраб.: Центр обучающих систем ИнТК СФУ. - Версия 1.0. – Электрон. дан. (4 Мб). - Красноярск : СФУ, 2012. - 402 с.;
2 Пат. № 2139553, Российская Федерация, МПК G01S 13/30. Многополяризационный способ распознавания воздушных целей / Д.Г. Митрофанов, О.Д. Митрофанов. - 98103738; заявл. 21.02.1998; опубл. 10.10.1999;
3 Пат. № 2413958, Российская Федерация, МПК G01S 13/30. Радиолокационное устройство / УЭЙД Барри (GB). - 2007131434; заявл. 12.01.2006; опубл. 10.03.2011, бюл. № 7;
4 ICAO Annex 10 - Volume 4. Aeronautical Telecommunications - Surveillance and Collision Avoidance Systems, Topic 4.3.2.1.3 Range and Bearing Accuracy, (Bundesamt für Zivilluftfahrt, Schweiz);
5 G. Richard Curry: ''Radar System Performance Modeling'' 2005, ISBN 978-1-58053-816-9;
6 Ширман, Я.Д. Теоретические основы радиолокации. - М.: «СОВЕТСКОЕ РАДИО», 1970. - 560 с.
7 Фомин, А.Н. Теоретические и физические основы радиолокации и специального мониторинга: учебник / А.Н. фомин, В.Н. Тяпкин, Д.Д. Дмитриев и др.; под. ред. И.Н. Ищука. - Красноярск: Сиб. федер. ун-т, 2016. - 292 с
8 Гоноровский, И.С. Радиотехнические цепи и сигналы. - М.: «Сов. радио», 1977. - 608 с.;
9 Елисеев, А.В. Теоретические основы телекоммуникационных радиотехнических систем / Под. ред. А.А. Косогора. - М.: «ФИЗМАТЛИТ», 2023. - 448 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ моноимпульсного измерения радиальной скорости объектов | 2022 |
|
RU2799002C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ | 2017 |
|
RU2657462C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ ЗА ОДИН ПЕРИОД ИЗЛУЧЕНИЯ И ПРИЕМА ПАЧКИ РАДИОИМПУЛЬСОВ | 2021 |
|
RU2782574C1 |
| Способ определения дальности и радиальной скорости цели импульсно-доплеровской радиолокационной станцией | 2023 |
|
RU2807331C1 |
| Радиолокационная станция | 2021 |
|
RU2755518C1 |
| СПОСОБ ОДНОЗНАЧНОГО ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ В КОГЕРЕНТНО-ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2574079C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ЦЕЛЕЙ С ФАЗОВОЙ СЕЛЕКЦИЕЙ ПО ДАЛЬНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2360265C1 |
| Приёмо-передающий модуль радиотехнических сигналов | 2017 |
|
RU2661334C1 |

Изобретение относится к радиолокационным измерительным системам и предназначено для измерения параметров движения высокоскоростных воздушных объектов на больших расстояниях. Технический результат заключается в обеспечении надежной идентификации зондирующих импульсов соответствующих измерительных каналов и увеличении точности измерения радиальной скорости. В заявленном способе используются радиоимпульсы одинаковой длительности с заполнением в виде однотоновой частотной модуляции с индексами модуляции, равными:  ,
,  и
и 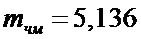 соответственно для первого, второго и третьего измерительных каналов. Длительность зондирующих импульсов выбирают равной периоду модулирующего колебания. После приема отраженного сигнала, преобразования и усиления его подают на фазовый детектор и, отфильтровывая высокочастотные составляющие, выделяют два квадратурных сигнала. Эти сигналы преобразуют в последовательность цифровых отсчетов, из которой с помощью скользящего окна длительностью, равной длительности зондирующего импульса, формируют блоки данных. В момент обнаружения заднего фронта радиоимпульса, используя принцип оптимального приема, определяют дальность до объекта слежения и по форме спектров сигналов идентифицируют измерительный канал. Радиальную скорость определяют по обобщенной фазовой задержке основных гармонических составляющих сигнала относительно эталонных сигналов. 8 ил., 4 табл.
соответственно для первого, второго и третьего измерительных каналов. Длительность зондирующих импульсов выбирают равной периоду модулирующего колебания. После приема отраженного сигнала, преобразования и усиления его подают на фазовый детектор и, отфильтровывая высокочастотные составляющие, выделяют два квадратурных сигнала. Эти сигналы преобразуют в последовательность цифровых отсчетов, из которой с помощью скользящего окна длительностью, равной длительности зондирующего импульса, формируют блоки данных. В момент обнаружения заднего фронта радиоимпульса, используя принцип оптимального приема, определяют дальность до объекта слежения и по форме спектров сигналов идентифицируют измерительный канал. Радиальную скорость определяют по обобщенной фазовой задержке основных гармонических составляющих сигнала относительно эталонных сигналов. 8 ил., 4 табл.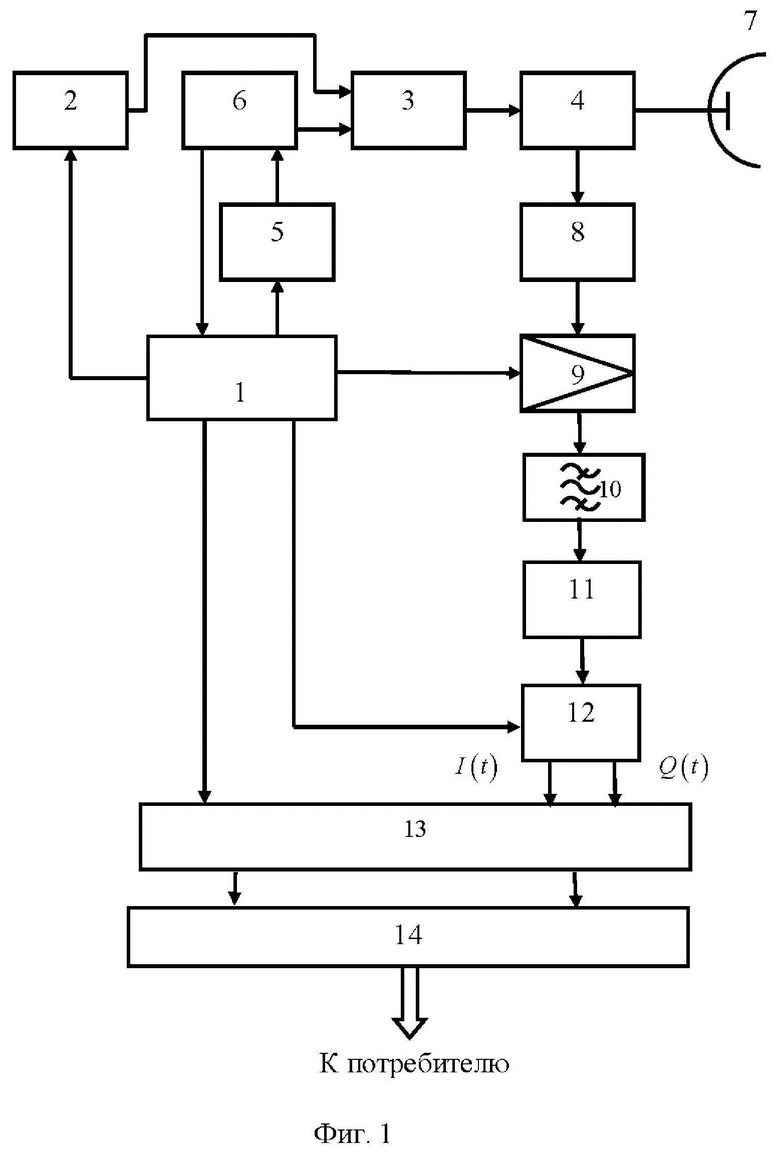
Способ определения параметров движения высокоскоростного воздушного объекта, включающий формирование зондирующего сигнала в виде группы из трех радиоимпульсов с различным высокочастотным заполнением, излучение зондирующего сигнала в пространство и прием импульсного сигнала, преобразование его по частоте, усиление, оцифровывание, проведение операции фильтрации, оценивание по критерию Неймана-Пирсона путем сравнения с соответствующим порогом и идентифицирование в качестве обнаруженной цели, а по времени задержки определение расстояния до цели, отличающийся тем, что для кодировки радиоимпульсов одинаковой длительности используют в качестве заполнения однотоновую частотную модуляцию с индексами модуляции, равными:  ,
,  и
и  соответственно для первого, второго и третьего измерительных каналов, при этом длительность зондирующих импульсов выбирают равной периоду модулирующего колебания, а после приема отраженного сигнала, преобразования и усиления его подают на фазовый детектор и, отфильтровывая высокочастотные составляющие, выделяют два квадратурных сигнала:
соответственно для первого, второго и третьего измерительных каналов, при этом длительность зондирующих импульсов выбирают равной периоду модулирующего колебания, а после приема отраженного сигнала, преобразования и усиления его подают на фазовый детектор и, отфильтровывая высокочастотные составляющие, выделяют два квадратурных сигнала:  ,
,  , из которых после оцифровки с помощью следящего окна формируют два массива
, из которых после оцифровки с помощью следящего окна формируют два массива  ,
,  ,
,  , вычисляют амплитудные отсчеты
, вычисляют амплитудные отсчеты  , формирующие импульсный сигнал, и используют их для идентификации каналов по максимальному значению соответствующего признака:
, формирующие импульсный сигнал, и используют их для идентификации каналов по максимальному значению соответствующего признака:
- первого канала  ;
;
- второго канала  ;
;
- третьего канала  ,
,  ,
,
где  - малая величина, исключающая деление на ноль,
- малая величина, исключающая деление на ноль,
 ,
,  ,
,  - нулевая, первая и вторая спектральные составляющие соответствующих спектров,
- нулевая, первая и вторая спектральные составляющие соответствующих спектров,
в то время как для измерения радиальной скорости заранее через прямое и обратное преобразования Фурье насчитывают матрицу значений для шести основных гармоник при условии отсутствия шума и равенства нулю частоты Доплера  ,
,  ,
,  , объединяют сигнальные квадратурные компоненты в единый нормированный комплексный сигнал
, объединяют сигнальные квадратурные компоненты в единый нормированный комплексный сигнал  и, аналогично, насчитывают матрицу значений для шести подобных основных гармоник, содержащих информацию о частотном сдвиге Доплера
и, аналогично, насчитывают матрицу значений для шести подобных основных гармоник, содержащих информацию о частотном сдвиге Доплера  , на основании полученных матриц для каждой основной гармоники рассчитывают модуль обобщенного фазового набега
, на основании полученных матриц для каждой основной гармоники рассчитывают модуль обобщенного фазового набега
 ,
,  ,
,
при этом для определения знака радиальной скорости расчет ведут по формуле
 ,
,  ,
,
а радиальные скорости, соответствующие первому, второму и третьему каналам, определяют как
 ,
,  ,
,  ,
,
где  - сопрягающие размерные коэффициенты.
- сопрягающие размерные коэффициенты.

