Изобретение относится к радиолокационным методам (способам) и может быть использовано при создании различных систем обнаружения и идентификации самых разнообразных динамических объектов, испытывающих периодические колебания (вибрации) или вращения, благодаря либо наличию внутренних низкочастотных резонансов, либо вследствие осуществления функциональных возвратных движений (например, при вращении лопастей БПЛА, вертолета или подводной лодки), которые приводят к модуляционному обогащению спектров зондирующих сигналов при их отражении от наблюдаемых объектов.
Хорошо известно, что при отражении радиоволн с несущей частотой ƒ от объектов, испытывающих периодические механические колебания (вибрации) или вращения, происходит периодическая модуляция фазы отраженного сигнала с коэффициентом девиации β, пропорциональным отношению амплитуды колебаний (ΔX) к длине зондирующей объект волны (∧):  В англоязычной литературе этот эффект носит название «Микроэффект Доплера» - МЭД (См. Т. Thayaparan, S. Abrol and Е. Riseborough, "Micro-Doppler radar signatures for intelligent target recognition", Technical Memorandum, DRDC Ottawa TM 2004-170, September 2004: https:// goo.gl/aZxzB5 [1]). Он используется для обнаружения, классификации и распознавания целей. По сути дела, МЭД - это новый инструмент поиска и идентификации всевозможных объектов, используемый в различных системах радиолокационного зондирования с целью повышения эффективности систем автоматического распознавания целей и санкционированного допуска. Известны, например, давние планы создания нового портативного «микро-доплеровского радара» для распознавания противника на поле боя или для поиска жертв техногенных катастроф и стихийных бедствий [1]. Тем не менее, все известные на сегодняшний день конструктивные решения относятся только к методам непосредственной регистрации вызываемых МЭД модуляционных сигналов, не касаясь проблемы их обнаружения при наличии сильных помех.
В англоязычной литературе этот эффект носит название «Микроэффект Доплера» - МЭД (См. Т. Thayaparan, S. Abrol and Е. Riseborough, "Micro-Doppler radar signatures for intelligent target recognition", Technical Memorandum, DRDC Ottawa TM 2004-170, September 2004: https:// goo.gl/aZxzB5 [1]). Он используется для обнаружения, классификации и распознавания целей. По сути дела, МЭД - это новый инструмент поиска и идентификации всевозможных объектов, используемый в различных системах радиолокационного зондирования с целью повышения эффективности систем автоматического распознавания целей и санкционированного допуска. Известны, например, давние планы создания нового портативного «микро-доплеровского радара» для распознавания противника на поле боя или для поиска жертв техногенных катастроф и стихийных бедствий [1]. Тем не менее, все известные на сегодняшний день конструктивные решения относятся только к методам непосредственной регистрации вызываемых МЭД модуляционных сигналов, не касаясь проблемы их обнаружения при наличии сильных помех.
Известен способ измерения вибрационных параметров малоудаленных объектов (см. пат. РФ №2158006, G01S 13/02, п. 20.10.2000 [2]), предназначенный для определения параметров близко расположенных вибрирующих объектов по гармоническим составляющим отраженного сигнала. Способ заключается в излучении с небольшого расстояния (десятки-сотни метров) в направлении исследуемого объекта модулированного зондирующего сигнала, приеме отраженного объектом сигнала, его детектировании, выделении модуляционной составляющей, на основе анализа которой определяются вибрационные параметры объекта. При этом зондирующий сигнал модулируют по закону модуляционной составляющей принятого отраженного сигнала до тех пор, пока амплитуда выделенной модуляционной составляющей при сравнении ее с данным эталонным пороговым уровнем не превысит его, а затем осуществляют спектральный анализ модуляционной составляющей для определения ее характеристик, по которым оценивают вибрационные параметры объекта. Отметим следующие недостатки известного способа: 1) небольшое расстояние обработки отраженных сигналов (что исключает, например, возможность радиолокации удаленных летящих целей); 2) увеличение времени формирования нужного сигнала опроса, зондирующего цель; 3) неизбежные трудности детектирования первоначального отраженного целью сигнала в условиях, когда эффективная площадь рассеяния (ЭПР) цели чрезвычайно мала: слабое отражение радиосигналов (PC) от цели приводит и к ослаблению амплитуды модуляционного спектра отраженных PC, уменьшая вероятность обнаружения искомого объекта и оценки параметров, характеризующих его состояние.
Техническим эффектом, на достижение которого направлено предлагаемое решение, является повышение вероятности обнаружения и достоверности идентификации различных динамических объектов, подверженным внутренним колебаниям, или производящих какие-либо возвратные движения.
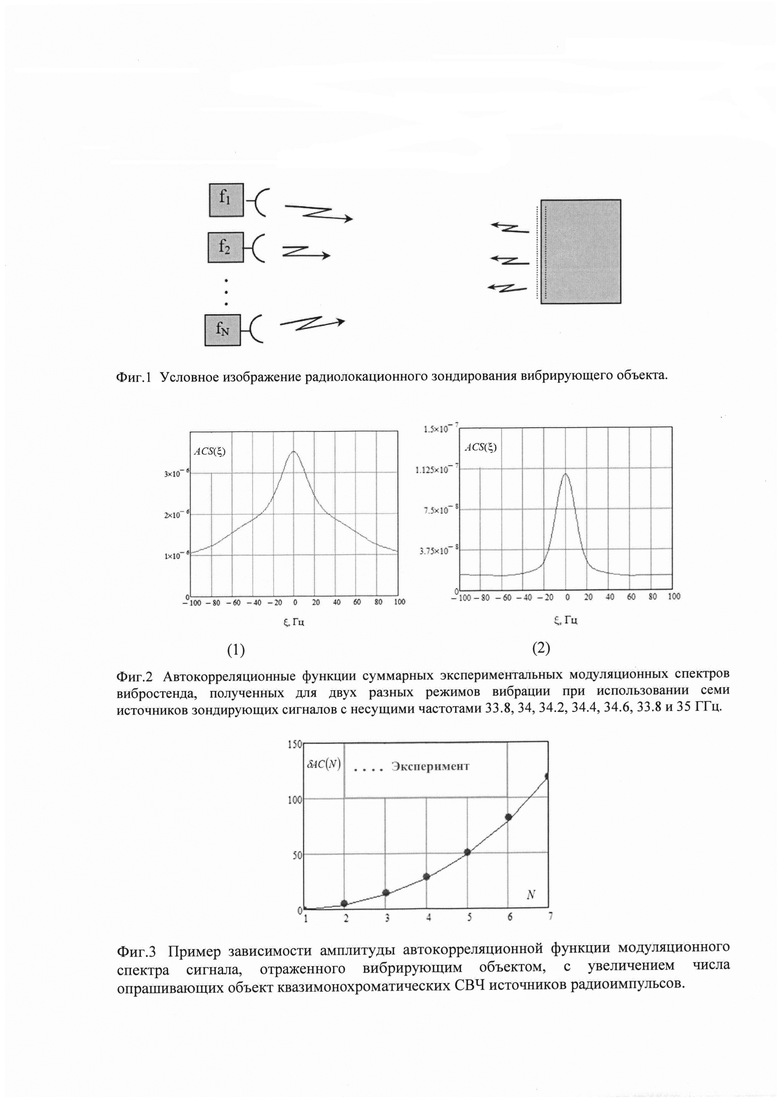
Упомянутый эффект достигается тем, что в способе обнаружения, идентификации и мониторинга вибрирующих объектов, включающем излучение в направлении исследуемого объекта зондирующего сигнала, прием отраженного объектом сигнала и выделение в его амплитудном спектре связанной с вибрациями модуляционной составляющей, согласно изобретению, используют набор зондирующих сигналов с различными несущими частотами fn (n=l…N), после преобразования которых на промежуточную частоту в их амплитудных спектрах выделяют модуляционные составляющие, сумма которых подвергается автокорреляционной обработке в частотной области, причем критерием обнаружения и идентификации цели является появление явно выраженного пика получаемой автокорреляционной функции. Зондирующие сигналы формируют набором некогерентных излучателей или формируют синтезатором частот.
В заявляемом способе предлагается использовать простые зондирующие сигналы (либо непрерывные, либо импульсные со специально подобранной скважностью, определяемой другими характеристиками цели (скоростью, дальностью, ЭПР), никак не связанные с характером вибраций цели, основываясь на том, что каждая вибрирующая цель формирует свой уникальный модуляционный спектр, практически не зависящий от несущей частоты зондирующих сигналов.
В общем случае амплитуды спектров сигналов, возникающих в результате отражения целью, испытывающей вибрации с характерными частотами Fq (q=1…Q), зондирующего радиосигнала с общей длительностью TS, в упрощенной одномерной модели можно представить следующим образом:

где F=(ƒ-ƒn) - одинаковый для всех излучателей частотный сдвиг, Rn=R(ƒn) - дисперсионная, в общем случае, функция, описывающая произведение коэффициента отражения цели на коэффициент усиления антенны используемого радара,  ∧n=с/ƒn, а θq - случайные фазовые сдвиги.
∧n=с/ƒn, а θq - случайные фазовые сдвиги.
В качестве источников зондирующих цель сигналов могут применяться как разные радарные установки (Фиг. 1), так и одна и та же при использовании СВЧ-синтезатора (источника, формирующего радиосигналы с разными несущими частотами).
При рассеянии целью зондирующих сигналов (либо электромагнитных в надводной среде, либо акустических - под водной поверхностью) возникают характерные всплески модуляционных спектров An(F), выделяемых приемниками промежуточной частоты.
Поскольку упомянутые модуляционные спектры полностью определяются характером резонансных колебаний одного и того же объекта, то эти всплески появляются практически при одних и тех же значениях упомянутой отстройки F(MS)=Fqa+Fkb, кратных характерным частотам колебаний объекта Fq и их интермодуляций (здесь a и b - целые числа, a q, k=1…Q): в случае тела живого человека - это ритмы сердцебиения и дыхания (Q=2).
В результате появляется явно выраженный пик автокорреляционной функции суммы модуляционных спектров как ее зависимости от частотной отстройки

где  а интервал интегрирования ΔF должен включать в себя оцениваемый экспериментально верхний предел модуляционного спектра.
а интервал интегрирования ΔF должен включать в себя оцениваемый экспериментально верхний предел модуляционного спектра.
На фиг. 2 приведены два примера функций ACS(ξ,7) вычисленных по экспериментальным измерениям спектров радиосигналов, отражаемых испытательным вибростендом при двух разных режимах вибрации, для семи источников зондирующих сигналов, несущие частоты которых образуют следующий ряд: fo=33.8, 34, 34.2, 34.4, 34.6, 33.8 и 35 ГГц.
Если относительная разность частот ƒn не очень велика (|ƒn/ƒ1-1|<<1), то в отсутствие дисперсии процессов отражения и приема радиосигналов, в первом приближении амплитуда автокорреляционной функции суммы модуляционных спектров растет пропорционально N2. Как показывают теория и эксперименты, дисперсия процессов отражения и приема радиосигналов могут делать эту зависимость гораздо более ярко выраженной. Кривая на фиг. 3 демонстрирует увеличение амплитуды ACS(0,N) автокорреляционной функции экспериментально измеренной суммы модуляционных спектров отраженных сигнала с ростом числа (N=1…7) СВЧ источников, облучающих тестовый вибростенд на разных частотах сантиметрового диапазона (ƒ1=33.8, ƒ2=34.0, ƒ3=34.2, ƒ4=34.4, ƒ5=34.6, ƒ6=33.8 и ƒ7=35 Ггц), по сравнению с автокорреляционной функцией модуляционного сигнала, отражаемого целью при облучении ее только на частоте ƒ1:  Как видно, это увеличение заметно больше, чем рост функции N2.
Как видно, это увеличение заметно больше, чем рост функции N2.
Предлагаемый способ дополняет потенциал традиционных радиолокационных методов, основанных на классическом эффекте Доплера. При этом открывается возможность значительного повышения чувствительности средств обнаружения и идентификации даже неподвижных динамических объектов, подверженных внутренним колебаниям или содержащих детали, производящие какие-либо возвратные движения. Кроме того, сразу после обнаружения объекта наблюдения характерный спектральный "портрет" его модуляционной динамики может быть автоматически зафиксирован и внесен в базу данных глобальной системы радиочастотной идентификации.
Указанная постановка задачи является очень актуальной, поскольку она открывает новые пути решения широкого круга проблем - как специального значения, так и социальных. Например, можно не только обнаруживать и классифицировать объекты с незначительной величиной ЭПР (такие как БПЛА, а также самолеты, изготовленные с использованием стелс-технологии), но и контролировать качество работы различных двигателей, создавать средства медицинской диагностики или приборов для обнаружения живых людей в завалах при техногенных катастрофах, создавать средства неразрушающего контроля для обнаружения дефектов или опасных вибраций жизненно важных сооружений (зданий, тоннелей, мостов), и т.п.
Следует подчеркнуть, что в отличие от известных методов радиолокации, основанных на использовании достаточно сложных сигналов зондирования цели, предложенный способ может опираться на использовании простых (квазимонохроматических) радиоимпульсов опроса, поскольку сложным отраженный сигнал становится, благодаря уникальным колебаниям цели, а его корреляционная обработка позволяет не только обнаруживать, но и идентифицировать объект наблюдения.
Кроме того, предложенный способ позволяет использовать тривиальные корреляционные методы обработки спектров отраженных сигналов. Это позволяет повысить достоверность идентификации различных объектов и снизить время обработки принимаемой информации, что является чрезвычайно важным при обнаружении высокоскоростных малоконтрастных целей.
Использованные источники:
1. Т. Thayaparan, S. Abrol and Е. Riseborough, "Micro-Doppler radar signatures for intelligent target recognition", Technical Memorandum, DRDC Ottawa TM 2004-170, September 2004: https://goo.gl/aZxzB5.
2. Митрофанов Д.Г., Пономарев Д.Л., Митрофанов О.Д., Способ измерения вибрационных параметров малоудаленных объектов, Патент РФ №2158006.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения вибрирующих объектов, основанный на анализе интерференционной картины, получаемой с использованием лазерных локационных станций гетеродинного типа | 2022 |
|
RU2791818C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ НЕПОДВИЖНЫХ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ ИСКУССТВЕННОГО ПРОИСХОЖДЕНИЯ | 2018 |
|
RU2696006C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПОИСКА, СОДЕРЖАЩИХ МЕТАЛЛИЧЕСКИЕ КОНТАКТЫ, В НЕЛИНЕЙНЫХ РАДИОЛОКАТОРАХ БЛИЖНЕГО ДЕЙСТВИЯ | 2016 |
|
RU2614038C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ ЛОКАЦИИ В РАДИОЛОКАЦИОННЫХ ДАТЧИКАХ С ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ РАДИОВОЛН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2695799C1 |
| Способ подавления боковых лепестков ЛЧМ-сигнала с межпериодным расширением спектра | 2016 |
|
RU2624769C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2020 |
|
RU2735289C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА | 2001 |
|
RU2212683C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПОДПОВЕРХНОСТНЫХ СТРУКТУР И ЛОКАЛЬНЫХ ОБЪЕКТОВ В НИХ | 2002 |
|
RU2244944C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2622908C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1999 |
|
RU2178187C2 |
Изобретение относится к радиолокации и может быть использовано при создании различных систем обнаружения и идентификации самых разнообразных динамических объектов, испытывающих периодические колебания (вибрации) или вращения благодаря наличию внутренних низкочастотных резонансов. Технический результат состоит в увеличении вероятности обнаружения и точности идентификации объекта - вибрирующего или содержащего механизмы, испытывающие какие-либо возвратные движения - с незначительной величиной эффективной площади рассеяния (ЭПР) на фоне помех при ограниченной величине излучаемой радаром мощности и конечной чувствительности приемников. Для этого используют большое количество зондирующих целей радиосигналов, спектры которых образуют вблизи разных несущих частот последовательность полос излучения с произвольно выбранными частотными интервалами. При этом суммируются амплитудно-частотные распределения модуляционных спектров отраженных сигналов, регистрируемых на выходе соответствующих преобразователей частоты. Получившаяся сумма подвергается автокорреляционной обработке в частотной области. Критерием обнаружения цели является появление явно выраженного пика получаемой автокорреляционной функции, амплитуда которого растет как степенная функция числа излучателей. 2 з.п. ф-лы, 3 ил.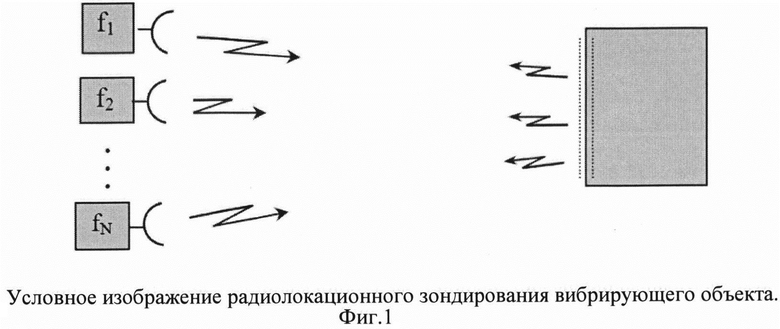
1. Способ обнаружения, идентификации и мониторинга вибрирующих объектов, включающий излучение в направлении исследуемого объекта зондирующего сигнала, прием отраженного объектом сигнала и выделение в его амплитудном спектре связанной с вибрациями модуляционной составляющей, отличающийся тем, что используют набор зондирующих сигналов с различными несущими частотами fn (n=1…N), после преобразования которых на промежуточную частоту в их амплитудных спектрах выделяют модуляционные составляющие, сумма которых подвергается автокорреляционной обработке в частотной области, причем критерием обнаружения цели является появление явно выраженного пика получаемой автокорреляционной функции.
2. Способ по п. 1, отличающийся тем, что зондирующие сигналы формируют набором некогерентных излучателей.
3. Способ по п. 1, отличающийся тем, что зондирующие сигналы формируют синтезатором частот.
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПОИСКА, СОДЕРЖАЩИХ МЕТАЛЛИЧЕСКИЕ КОНТАКТЫ, В НЕЛИНЕЙНЫХ РАДИОЛОКАТОРАХ БЛИЖНЕГО ДЕЙСТВИЯ | 2016 |
|
RU2614038C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОГЕРЕНТНОГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ РЛС С ПЕРИОДИЧЕСКОЙ ЧМ МОДУЛЯЦИЕЙ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ СПОСОБ | 2006 |
|
RU2347235C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2622908C1 |
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

