Механизм одностороннего захвата колес относится к механизмам для перемещения автомобиля и другой колесной техники. Изобретение, далее именуемое механизм захвата, предназначается для захвата с целью дальнейшей транспортировки в другое место автомобилей и др. колесной техники, далее именуемые автомобилями, в многоярусных гаражах или в составе эвакуаторов автомобилей.
Известно устройство для транспортировки автомобиля в многоярусной механизированной автостоянке, оформленное патентом RU 2134760 C1. Устройство обеспечивает перемещение автомобиля на поддонах.
К недостаткам устройства относится необходимость изготавливать и обслуживать поддоны, что требует дополнительных затрат.
Предлагаемый механизм захвата устраняет названный недостаток. Заявленное изобретение решает задачу упрощения механизма для перемещения автомобилей без поддонов и подъемных устройств.
Сущность изобретения состоит в том, что перемещение автомобиля с заблокированными колесами (тормозом или коробкой передачи) обеспечивается захватом колес с одной стороны простым механизмом.
Техническим результатом будет получение механизма для перемещения автомобилей без применения поддонов, в многоярусных гаражах или без применения подъемных механизмов в эвакуаторах на улицах и во дворах.
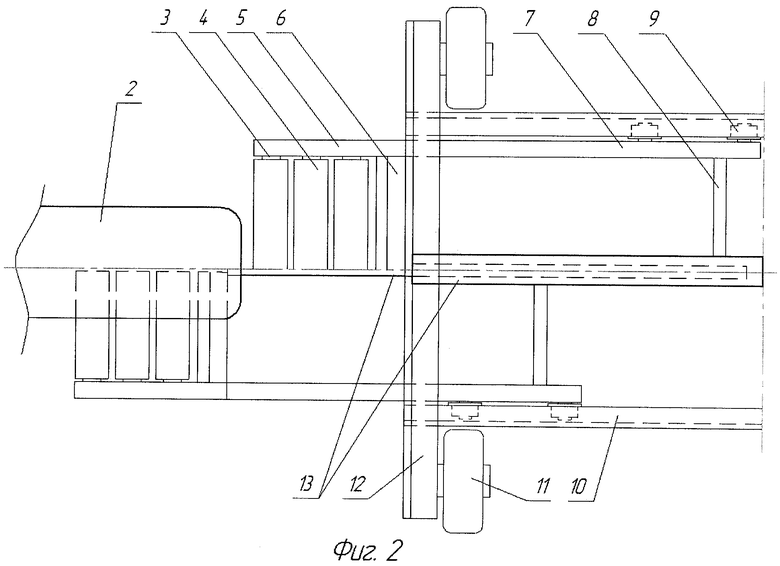
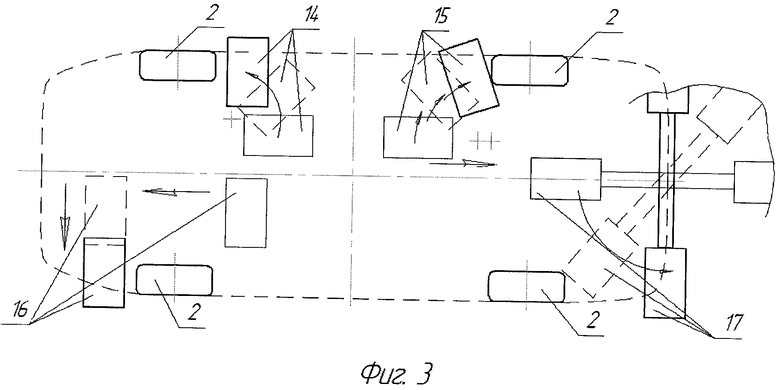
На фиг.1 на бетонной плите 1 к колесу 2 автомобиля (переднему) подведен упор, состоящий из ряда осей 3 с валиками 4, корпуса 5 и ограничителя 6. Упор соединен жестко с рамой из штанги 7, трубы 8 и роликов 9. Упор с рамой перемещаются на тележке из швеллеров 10, колес 11 и уголков 12. Одновременно к заднему колесу автомобиля подводятся аналогичные упоры с рамой, их изображение является зеркальным отражением фиг.1 и не показано. Пунктиром показаны контуры валиков и ограничителя, поднявших колесо и самого колеса. На фиг.2 - вид сверху на толкатель из гидроцилиндра с поршнем 13 для перемещения рамы с упором и рама с упором в верхней части до подъема колеса 2, в нижней части с поднятым колесом. На фиг.3 - вид сверху на варианты механизма захвата закатываемого под автомобиль спереди или сзади. Упоры 14 вращаются вокруг вертикальной оси. Упоры 15 аналогичные, но имеют еще продольное перемещение оси вращения. Описанные выше и другие аналогичные варианты далее будем именовать односторонним захватом колес изнутри автомобиля. Упоры 16 и 17 захватывают колеса автомобиля с наружной стороны и имеют еще соответственно поперечное перемещение и вращение вокруг вертикальной оси, такие и другие возможные варианты далее будем именовать односторонним захватом колеса снаружи автомобиля. Такие варианты упоров предполагают более сложную конструкцию, но в некоторых случаях будут полезны.
Механизм захвата закатывают под автомобиль сбоку между передним и задним колесами благодаря тележке, при этом допустимо небольшое отклонение от геометрического центра между колесами. Толкатель выдвигает одновременно передние и задние упоры с рамой соответственно к переднему и заднему колесам 2, здесь один из упоров первым упрется в колесо 2. В этот момент первый упор должен остановиться, его остановка обеспечивается, например, применением единого толкателя с креплением цилиндра за один упор и поршня за другой упор или применением разных толкателей, но с сообщающимися цилиндрами толкателей, в которых будет всегда единое давление, или любым другим способом. После остановки первого упора второй упор под действием толкателя продолжит движение до контакта со вторым колесом. Обеспечение остановки первого упора при контакте его с первым колесом 2, с продолжением движения второго упора до контакта со вторым колесом, далее будем именовать самоцентровкой. С момента контакта двух упоров в два колеса механизм захвата начнет одновременно захватывать и переднее и заднее колеса 2. Благодаря вращению валиков 4 на осях 3 колеса 2 поднимутся на валики 4, при этом захват каждого колеса 2 происходит только с одной стороны. Рама перемещается на тележке по швеллерам 10. Давление в гидроцилиндре толкателя регулируется так, что ограничители 6 остановят дальнейшее перемещение упоров. Ограничители фиксируют автомобиль в поднятом положении, и он может транспортироваться в требуемое место. После транспортировки автомобиль опускается, для чего упоры перемещаются в обратном направлении (друг к другу). Если, например, расстояние между осями будет большим, то колеса 2 «провалятся» между валиками и, по меньшей мере, одно колесо не сможет самостоятельно скатиться при перемещении упоров друг к другу. Угол наклона ряда осей, диаметры валиков, габариты ограничителя, расстояния между осями и ограничителем должны обеспечивать самопроизвольное скатывание колес 2 с упоров и, следовательно, самостоятельный спуск автомобиля на плиту 1 или пол под собственным весом. После перемещения упоров в первоначальное положение механизм захвата выкатывается из-под автомобиля и может применяться для транспортировки других автомобилей.
Все компоненты механизма захвата могут быть различными.
Упорами здесь и далее будем называть устройства различных конфигураций. В них могут применяться оси различных диаметров и длин. Разным может быть число осей и угол наклона ряда осей. На одной оси целесообразно иметь несколько валиков, это предотвратит заклинивание длинных валиков на длинных осях. Оси могут крепиться на упорах обеими концами, только за одним конец (консоль) и/или с опорой на промежуточные упоры между валиками. Валики могут быть разных длин и диаметров. Угол наклона обеспечиваться еще и разницей диаметров ряда валиков или дополнительными приспособлениями отклоняющими упоры, образуя необходимый угол наклона прямолинейного или иного ряда осей. Могут применяться различные способы уменьшения трения: смазка, подшипники и т.д. Поверх осей и/или валиков могут применяться специальные ленты, образующие некоторый аналог транспортерных линий и любые другие устройства, позволяющие компенсировать отсутствие вращения колеса 2. Ограничители и корпусы также могут быть различными по формам и размерам. Соединение элементов упора между собой и с элементами рамы может быть всевозможных видов.
Рамы также подразумевают разнообразный набор продольных, поперечных и других элементов, скрепленных между собой жестко разнообразными способами и любыми иными роликами, колесами и пр.
Толкатели тоже могут быть любых других систем: гидросистема, пневмосистема, механическая передача цепная, зубчатая или иная. Элементы толкателя могут соединяться между собой и другими элементами механизма захвата разными способами.
Тележки также могут иметь разнообразный набор элементов, по которым перемещается рама, а также продольные, поперечные и другие элементы и любые иные ролики, колеса и пр., скрепленные между собой жестко разнообразными способами. Тележка обеспечивает транспортировку механизма захвата к автомобилю, с автомобилем и от автомобиля по плитам, полу, рельсам или другим поверхностям и направляющим.
Для механизма захвата требуется двигатель и трансмиссия. Разные варианты двигателей и трансмиссий, закрепленные между собой и на механизме захвата различным способом, далее будем именовать движителем. На чертежах элементы движителей не показываются и не описываются детально, так не являются сущностью предлагаемого изобретения, тем более что механизм захвата может входить в состав манипуляторов и эвакуаторов, подъемников и лифтов, погрузчиков и других устройств, в конструкции которых имеются двигатели и трансмиссия.
Для управления работой механизма захвата необходима система управления с различными элементами, такими как электропроводы, трубопроводы, выключатели, муфты, пульты управления и др. всевозможных конфигураций, которые далее будем именовать элементами, обеспечивающими управление механизмом захвата.
Дорожное покрытие, плиты, пол, конструкция автомобиля и колес здесь также подробно не раскрываются.
Технический результат достигается, изобретение является простым устройством для перемещения автомобилей без применения поддонов в многоярусных гаражах или без применения подъемных механизмов в эвакуаторах на улицах и во дворах. Все элементы механизма захвата могут быть изготовлены промышленным способом.
Изобретение относится к механизмам для перемещения автомобилей. Механизм одностороннего захвата колес содержит, по меньше мере, две рамы, установленные на, по меньшей мере, одну тележку, с возможностью закатываться под автомобиль между колес, упоры, установленные на раме, по меньшей мере, один толкатель с возможностью перемещать и/или вращать упоры, движитель и, по меньшей мере, один элемент, обеспечивающий управление механизмом захвата. Упоры включают корпус и закрепленные на нем, по меньшей мере, одну ось и, по меньшей мере, один валик на каждой оси, ленты, аналогичные транспортерным поверх осей и/или валиков или без лент, с возможностью вращения. Ограничитель выполнен с возможностью совместно с толкателями обеспечивать остановку упоров. Упоры с рамами и толкателем установлены с возможностью самоцентровки и одностороннего захвата колес изнутри или снаружи автомобиля. Достигается упрощение механизма для перемещения автомобиля. 2 з.п. ф-лы, 3 ил.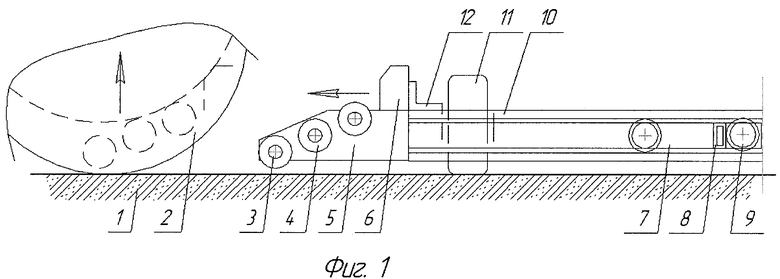
1. Механизм одностороннего захвата колес, содержащий, по меньшей мере, две рамы, установленные на, по меньшей мере, одну тележку, с возможностью закатываться на тележке под автомобиль между колес и передвигаться к колесам автомобиля и обратно, удерживать установленный на каждой раме, по меньшей мере, один упор, с возможностью удержания колес, и закрепленный к раме с упором, по меньшей мере, один толкатель, с возможностью перемещать и/или вращать упор к колесам, с колесами и от колес, установленные на механизме, по меньшей мере, один движитель, с возможностью перемещать ее с автомобилем или без него и через толкатели передвигать упоры, и, по меньшей мере, один элемент, обеспечивающий управление механизмом захвата, с возможностью управления работой механизма, предназначенный для перемещения автомобиля, отличающийся тем, что упоры с рамами и толкателем установлены с возможностью самоцентровки и одностороннего захвата колес изнутри или снаружи автомобиля для транспортировки автомобиля в требуемое место, при этом, по меньшей мере, один упор включает корпус и закрепленные на нем, по меньшей мере, одну ось и валики на каждой оси, ленту, аналогичную транспортерной, поверх осей и/или валиков или без ленты, с возможностью вращения, обеспечивающих захват и подъем заблокированных колес, а также самопроизвольное скатывание колес при спуске автомобиля, и, по меньшей мере, один ограничитель, с возможностью совместно с толкателями обеспечивать остановку упоров после захвата и фиксацию колес при транспортировке автомобиля.
2. Механизм по п.1, отличающийся тем, что упор включает две и более оси, составляющих ряд осей, расположенных, по меньшей мере, на одной прямой с возможностью самопроизвольного скатывания колес при спуске за счет угла наклона, образованного либо этой прямой, либо разницей диаметров осей и/или валиков.
3. Механизм по п.1, отличающийся тем, что включает, по меньшей мере, одно дополнительное приспособление, установленное на раме с возможностью отклонения упора для изменения угла наклона, обеспечивающего самопроизвольное скатывание колес при спуске.
| JP 50150059 U, 13.12.1975 | |||
| Погрузчик | 1979 |
|
SU893844A1 |
| Подъемник для вывешивания автомобиля | 1986 |
|
SU1350065A1 |
| JP 9144356 A, 03.06.1997 | |||
| US 5943901 A, 31.08.1999 | |||
| СПОСОБ ИНТРАОПЕРАЦИОННОЙ МАРКИРОВКИ КОРЫ ГОЛОВНОГО МОЗГА | 2018 |
|
RU2695584C2 |

