Изобретение относится к области транспортного машиностроения и может быть использовано в конструкциях транспортных гусеничных машин, в том числе военного назначения.
Известна конструкция механизма натяжения гусениц БМП-1 [Боевая машина пехоты БМП-1. Техническое описание, Москва. Военное издательство Министерства обороны СССР, 1972, стр. 226]. Этот механизм натяжения гусеницы (МНГ) выполнен в виде червячного редуктора с муфтой блокировки кривошипа с натяжным колесом, имеющим ручной привод регулировки натяжения гусениц. Достоинствами МНГ БМП-1 являются простота конструкции и надежность работы. Недостатками МНГ являются относительно большие трудоемкость и длительность ручной регулировки натяжения гусениц, что создает затруднения в эксплуатации машин, в особенности военного назначения.
В механических приводах различных машин помимо червячных используются и другие виды механических передач. В частности, известна безводильная планетарная передача [WO 92/05372, F16H 1/28, 1/46 (или ЕР 91/01825)], содержащая три центральных зубчатых колеса и взаимодействующие с ними сателлиты. Одно из центральных колес является ведущим, другое - ведомым, а третье опорным, т. е. связано с корпусом передачи. Ведомое и опорное колеса выполнены с наружными зубьями, причем ведомое колесо расположено между двух венцов опорного колеса. Зубчатые венцы сателлитов, предназначенные для взаимодействия с ведомым и опорным колесами, в общем случае имеют разное число зубьев. Ведущее центральное колесо имеет внутренние зубья, которые находятся в зацеплении с центральными венцами сателлитов, а также внешние зубья, взаимодействующие с зубчатым ремнем. Сама по себе данная конструкция привода не обеспечивает выполнения функций МНГ.
На некоторых машинах отечественного и иностранного производства [Боевая машина десантная БМД-1. Техническое описание, Москва. Военное издательство Министерства обороны СССР, 1973, стр. 273] применяется гидравлический МНГ. Особенностью конструкции этого МНГ является наличие в его составе исполнительного гидроцилиндра, размещенного внутри корпуса машины и связанного с кривошипом натяжного колеса рычажным устройством. Управление работой гидроцилиндра осуществляется посредством гидропривода, включающего насос высокого давления, трубопроводную и регулирующую арматуру и датчики обеспечения функционирования гидравлической системы натяжения. Недостатком гидравлического МНГ является относительная сложность конструкции и пониженная надежность работы, связанная с ограниченным ресурсом уплотнений высоконапорной гидравлики. Другим недостатком гидравлического МНГ является использование полезного объема внутри корпуса машины для размещения МНГ с элементами привода.
Наиболее близка предлагаемой (прототип) конструкция механизма натяжения гусениц с электроприводом бронированной ремонтно-эвакуационной машины БРЭМ-Л [Бронированная ремонтно-эвакуационная машина БРЭМ-Л. Техническое описание ЭР 691-сб1 ТО, г. Курган, СКБМ]. МНГ БРЭМ-Л выполнен в виде электродвигателя, понижающего планетарно-винтового редуктора, гидравлического датчика индикации натяжения и ручного дублера натяжения гусеницы. Эта конструкция лишена отмеченных недостатков МНГ БМП-1. Она надежна в эксплуатации. Возможность дистанционного регулирования натяжения гусениц с пульта водителя позволяет снизить трудоемкость и уменьшить время выполнения работ по регулировке натяжения гусениц.
Недостатки МНГ БРЭМ-Л: его относительно большой вес; необходимость использования для размещения МНГ полезного объема зоны обитания внутри корпуса машины; неудобство пользования ручным дублером МНГ при выполнении регулировочных работ, обусловленное ограниченным доступом к нему внутри корпуса машины.
Для устранения указанных недостатков механизм натяжения гусеницы с электроприводом, подобно прототипу, включает электродвигатель привода, понижающий редуктор, датчик индикации натяжения гусеницы, ручной дублер натяжения, но в отличие от прототипа содержит безводильный планетарный редуктор, в центральном отверстии которого размещен кривошип механизма натяжения с устройством блокировки кривошипа, снабженным нажимным элементом сигнализатора выключения. Электродвигатель привода установлен на корпусе механизма натяжения посредством поворотной ступицы с пружиной, которая закреплена на неподвижной опоре корпуса механизма. Регулировочная ось ручного дублера механизма натяжения размещена снаружи машины.
Размещение оси кривошипа натяжного колеса с устройством блокировки в центральном отверстии безводильного планетарного редуктора обеспечивает компактность и относительно небольшой вес МНГ. Конструкция корпуса МНГ дает возможность его частичного размещения в забортном пространстве, тем самым освобождается полезное пространство в зоне обитания внутри корпуса машины. Доступ со стороны наружного борта к устройству ручного дублера МНГ повышает удобство выполнения регулировки натяжения гусениц в ручном режиме.
Индикатор натяжения гусеницы содержит резисторную катушку, встроенную в корпус механизма, и подвижный контакт, связанный с поворотной ступицей электродвигателя. Такая конструкция датчика отличается компактностью, имеет малый вес, обеспечивает удобство использования в эксплуатации.
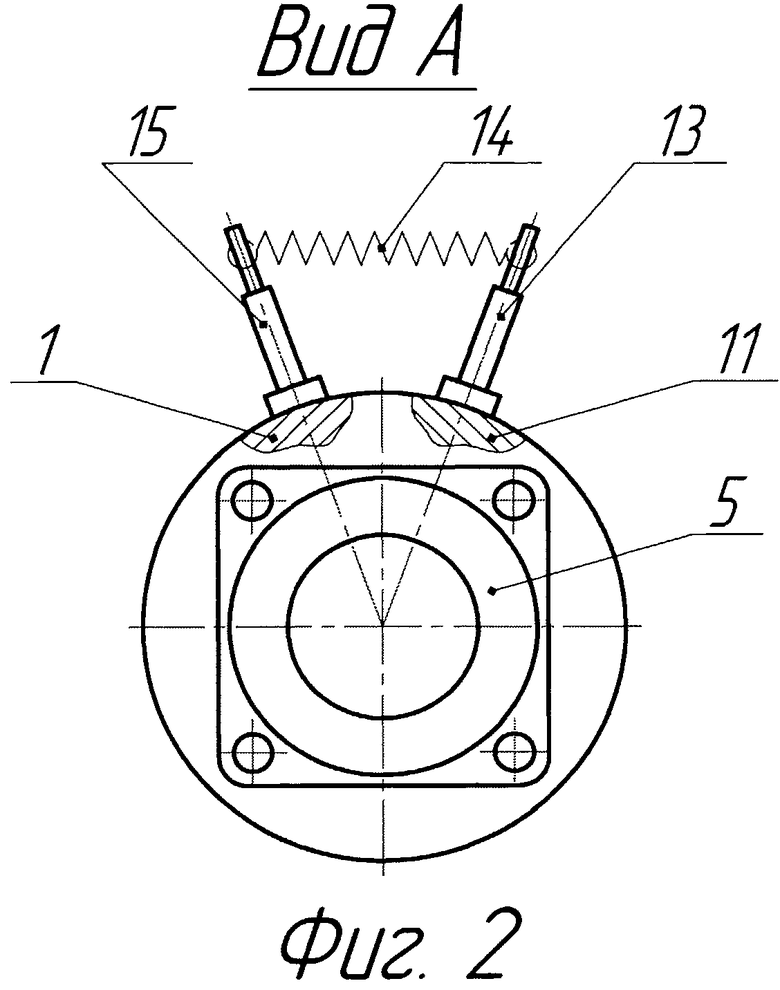
Изобретение поясняется чертежами, где показаны: на фиг.1 - устройство МНГ; на фиг.2 - пружинный привод поворотной ступицы электродвигателя;
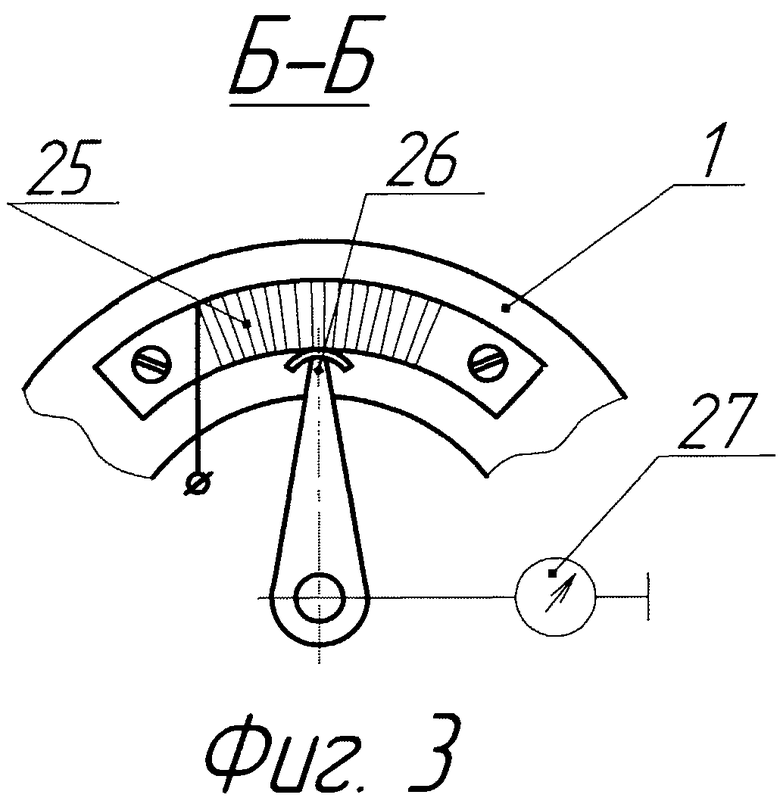
на фиг.3 - принципиальная схема резисторного датчика с указателем для регистрации усилия натяжения гусеницы.
В корпусе 1 МНГ размещен безводильный планетарный редуктор, включающий эпициклическое колесо 2, связанное с ведущей шестерней 3, вал которой посредством муфты 4 соединен с валом электродвигателя 5. Плавающие сателлиты 6 образуют зацепления с эпициклическим колесом 2, с опорными колесами 7 и 8, установленными неподвижно на корпусе 1, а также с ведомым колесом 9, жестко закрепленным на оси кривошипа 10 натяжного колеса (на чертеже не показано) гусеницы. Число зубьев - одинаковое для опорных колес 7 и 8 отличается от числа зубьев ведомого колеса 9, например, на один зуб, что позволяет получить необходимое (достаточно большое) передаточное отношение редуктора при одинаковых числах зубьев всех венцов сателлитов 6. Использование сателлитов с различными числами зубьев венцов, предназначенных для взаимодействия с опорным и ведомым колесами, дает дополнительную возможность увеличения передаточного числа редуктора. Благодаря большому количеству сателлитов (10…15), одновременно участвующих в передаче нагрузки, такая передача обеспечивает необходимую нагрузочную способность МНГ. Поворотная ступица 11, на которой установлен электродвигатель 5, закреплена в корпусе 1 посредством шарикового фиксатора 12. На торце ступицы 11 установлена опора 13 с пружиной 14, которая свободным концом закреплена на опоре 15, неподвижно установленной на корпусе механизма 1. Зубчатая полумуфта 16, подвижно установленная на шлицах кривошипа 10, под действием пружины 17 входит в зацепление с жестко закрепленной на корпусе 1 полумуфтой 18. Нажимной элемент 19 жестко закреплен на полумуфте 16 и взаимодействует с нажимным элементом концевого выключателя 20, связанного электрокоммутацией с указателем 21 блокировки на пульте водителя. Ручной дублер 22 натяжения гусеницы закреплен на крышке 23 МНГ. Он выполнен в виде вала-шестерни, входящей в зацепление с наружным зубчатым венцом эпициклического колеса 2. МНГ закреплен неподвижно в расточке борта 24 машины. Резисторная катушка 25 неподвижно закреплена в корпусе 1 и взаимодействует с подвижным контактом 26 (фиг. 3) электрического указателя 27 натяжения гусеницы. Штуцер 28 соединен с трассой подвода сжатого воздуха пневмосистемы машины.
Для выполнения регулировки натяжения гусеницы по сигналу с пульта (на чертеже не показан) водителя в полость „В" механизма блокировки кривошипа 10 МНГ подается сжаты воздух через штуцер 28. Полумуфта 16 под давлением воздуха перемещается, сжимая пружину 17. Нажимной элемент 19 перемещается с полумуфтой 16, при этом подвижный контакт концевого выключателя 20 инициирует световой сигнал на пульте водителя „Блокировка выкл.". После этого включается электродвигатель 5. Движение через муфту 4 передается на ведущую шестерню и далее на эпициклическое колесо 2. Плавающие сателлиты 6, находящиеся в зацеплении с колесом 2, перекатываются по опорным колесам 7, 8 и колесу 9. при этом кривошип 10, освобожденный от блокировки на корпусе 1 МНГ, поворачивается в нужном направлении. Управление с пульта водителя реверсивным электродвигателем 5 обеспечивает режимы натяжения или ослабления гусеницы. При натяжении гусеницы электродвигатель 5 под действием реактивного момента поворачивается со ступицей 11 в корпусе 1, при этом пружина 14, закрепленная между неподвижной 15 и подвижной (вместе со ступицей 11) опорой 13, деформируется адекватно моменту сопротивления на оси натяжного колеса (на чертеже не показано). Подвижный контакт 26 поворачивается вместе со ступицей 11 и скользит по резисторной катушке 25, неподвижно закрепленной на корпусе 1. Переменное сопротивление в электроцепи указателя 27 на пульте водителя, согласование с моментом сопротивления на оси натяжного колеса позволяет регистрировать усилие натяжения гусеницы по шкале указателя 27, пронормированное в единицах силы. После окончания натяжения гусеницы по сигналу с пульта водителя полость „В" посредством электропневмоклапана (на чертеже не показан) соединяется с атмосферой. Полумуфта 16 под действием сжатой пружины 17 входит в зацепление с полумуфтой 18, обеспечивая блокировку кривошипа 10 на корпус 1. При этом нажимной элемент 19 приводит в действие подвижный контакт концевого выключателя 20 и на пульте водителя сигнализатор 21 свидетельствует о включении устройства блокировки МНГ. При выполнении операции ослабления натяжения гусеницы сначала выключается блокировка МНГ и задается реверсивное (по отношению к режиму натяжения) вращение кривошипа 10 до завершения операции.
Применение предлагаемого МНГ с электроприводом позволяет, по сравнению с известными конструкциями, уменьшить вес и занимаемый механизмом натяжения полезный объем в корпусе машины. Свободный доступ к ручному дублеру регулировки натяжения гусеницы со стороны наружного борта повышает удобство обслуживания МНГ в эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ АВТОМАТИЧЕСКОГО НАТЯЖЕНИЯ ГУСЕНИЦ | 2014 |
|
RU2547318C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| ЛЕБЕДКА | 2001 |
|
RU2192385C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2024 |
|
RU2829243C1 |
| КОМБИХОД | 2007 |
|
RU2347710C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПОРНО-РЕГУЛИРУЮЩИМ ОРГАНОМ ТРУБОПРОВОДНОЙ АРМАТУРЫ И СПОСОБ НАСТРОЙКИ ЕГО ОГРАНИЧИТЕЛЯ МАКСИМАЛЬНОГО КРУТЯЩЕГО МОМЕНТА | 2005 |
|
RU2273784C1 |
| УСТРОЙСТВО ДЛЯ СТОПОРЕНИЯ | 2003 |
|
RU2235958C1 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2002 |
|
RU2268839C9 |
| Безводильная планетарная передача | 1981 |
|
SU1017859A1 |
Изобретение относится к транспортным гусеничным машинам, в том числе военного назначения. Механизм натяжения гусеницы с электроприводом снабжен планетарным безводильным редуктором, в центральном отверстии которого размещен кривошип натяжного колеса. Устройство блокировки кривошипа снабжено элементом сигнализатора выключения. Индикатор натяжения гусеницы выполнен в виде малогабаритной резисторной катушки с подвижным контактом и электрическим указателем натяжения. Регулировочная ось ручного дублера натяжения расположена с наружной стороны борта машины. Регулировка натяжения гусеницы обеспечивается по сигналу с пульта водителя. Предложенное изобретение обладает компактностью, имеет малый вес и обеспечивает удобство использования в эксплуатации. 2 з.п. ф-лы, 3 ил.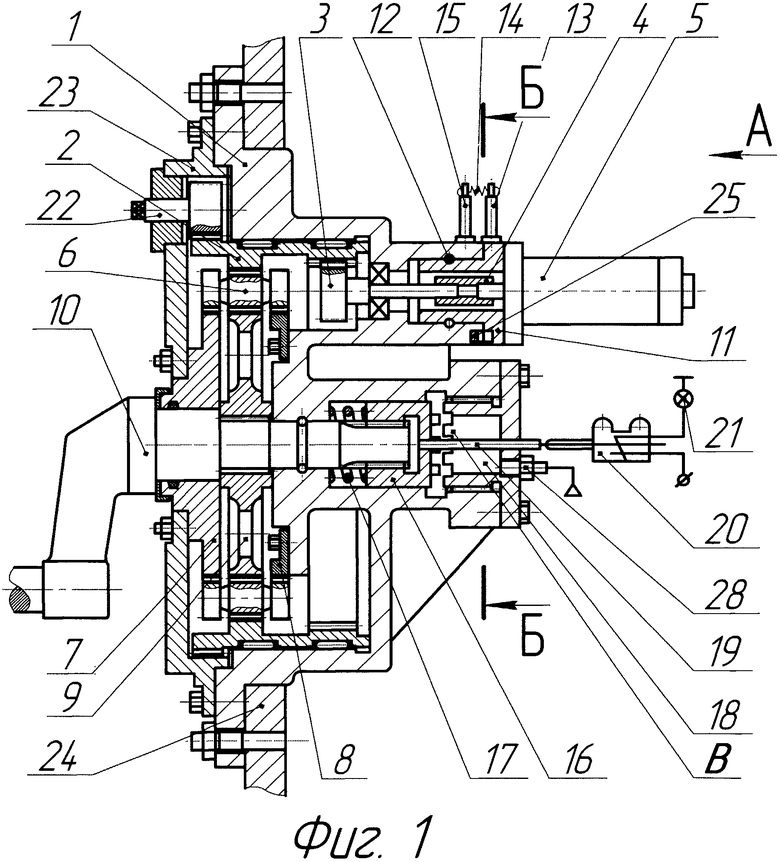
1. Механизм натяжения гусеницы с электроприводом, включающий электродвигатель привода, понижающий редуктор, датчик индикации натяжения гусеницы, ручной дублер натяжения, отличающийся тем, что содержит безводильный планетарный редуктор, в центральном отверстии которого размещен кривошип механизма натяжения с устройством блокировки кривошипа, снабженным нажимным элементом сигнализатора выключения, а электродвигатель привода установлен на корпусе механизма натяжения посредством поворотной ступицы с пружиной, которая закреплена на неподвижной опоре корпуса механизма.
2. Механизм натяжения гусеницы с электроприводом по п.1, отличающийся тем, что индикатор натяжения гусеницы содержит резисторную катушку, встроенную в корпус механизма, и подвижный контакт, связанный с поворотной ступицей электродвигателя.
3. Механизм натяжения гусеницы с электроприводом по п.1 или 2, отличающийся тем, что регулировочная ось ручного дублера механизма натяжения размещена снаружи машины.
| Устройство для натяжения гусеничной цепи транспортного средства | 1982 |
|
SU1060530A1 |
| Устройство для обжига и удаления изоляции | 1978 |
|
SU890502A1 |
| Устройство для натяжения гусеничной цепи транспортного средства | 1990 |
|
SU1733318A1 |

