Изобретение относится к области транспортного машиностроения и может быть использовано в конструкции ходовой части быстроходных гусеничных машин, в т.ч. военного назначения.
Известна конструкция кривошипного механизма натяжения с ручным приводом, применяемая на боевой машине пехоты БМП-2 (Боевая машина пехоты БМП-2. Техническое описание и инструкция по эксплуатации Э675-сб3, часть 2, город Курган). Конструкция отличается простотой и надежностью в эксплуатации. Недостатком является невозможность обеспечения автоматического натяжения гусениц, что является одной из причин схода опорных катков с гусеницы при поворотах машины.
Кривошипный механизм натяжения гусениц (МНГ далее по тексту) с электромеханическим приводом позволяет дистанционно с места водителя регулировать натяжение гусениц, при этом уменьшается трудоемкость и длительность цикла (Бронированная ремонтно-эвакуационная машина БРЭМ-Л. Техническое описание ЭР691-сб1-01ТО, город Курган, ОАО «СКБМ»). Этот МНГ, как и упомянутый выше, не обеспечивает автоматический подтяг гусеницы при поворотах. Остается проблематичным оперативное изменение натяжения гусениц, связанное с изменением длины периметра гусеничного обвода в ходовых системах с изменяемым клиренсом.
МНГ БРЭМ-Л наиболее близок к заявляемому техническому решению и выбран в качестве прототипа.
Целью изобретения является обеспечение автоматического натяжения гусениц в различных условиях движения и при изменении клиренса машины. Поставленная цель достигается тем, что МНГ включает устройство регулирования положения направляющего колеса относительно корпуса машины. Г-образный рычаг с направляющим колесом установлен посредством подвижного шлицевого соединения на неподвижной опоре корпуса механизма, а внутренняя полость Г-образного рычага соединена посредством канала в опоре рычага с гидравлической полостью цилиндра, в котором установлен подвижно поршень-разделитель жидкой и газовой сред, воздушная полость цилиндра соединена магистралью с автоматическим переключателем подачи сжатого воздуха из штатной пневмосистемы машины; в центральном отверстии штока поршня-разделителя установлена на резьбе заглушка, центральное отверстие которой связывает радиальный канал поршня-разделителя от цилиндрической проточки между его уплотнениями с атмосферой.
Применение предлагаемого технического решения позволяет реализовать следующие преимущества:
- обеспечить автоматическое натяжение гусениц в режиме прямолинейного движения;
- реализовать автоматический подтяг гусеницы отстающего борта при поворотах машины для исключения схода опорных катков с гусеницы;
- обеспечить натяжение гусеницы при изменении клиренса машины;
- увеличить диапазон регулируемого перемещения направляющего колеса по сравнению с известными механизмами кривошипного типа.
Сопоставительный анализ с прототипом показывает, что заявленный механизм автоматического натяжения гусениц отличается от известного тем, что Г-образный рычаг с направляющим колесом установлен посредством подвижного шлицевого соединения на неподвижной опоре корпуса механизма, а внутренняя полость Г-образного рычага соединена посредством канала в опоре рычага с гидравлической полостью цилиндра, в котором установлен подвижно поршень-разделитель жидкой и газовой сред, воздушная полость цилиндра соединена магистралью с автоматическим переключателем подачи сжатого воздуха из штатной пневмосистемы машины; в центральном отверстии штока поршня-разделителя установлена посредством резьбового соединения заглушка, центральное отверстие которой связывает радиальный канал поршня-разделителя от цилиндрической проточки между его уплотнениями с атмосферой.
Сравнение с другими аналогами не позволяет выявить в них признаки, отличающие заявленное техническое решение от прототипа и дающие указанный выше технический результат.
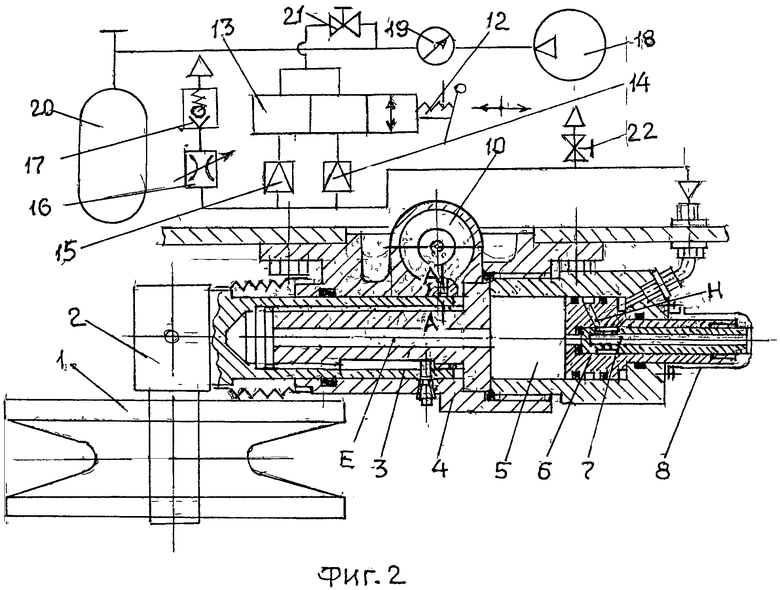
Изобретение поясняется чертежами, где показаны: на фиг.1 - вид механизма автоматического натяжения сбоку; на фиг.2 - вид в плане механизма с устройством автоматического управления; на фиг.3 - установка одностороннего клапана компенсации гидравлических утечек.
Устройство МНГ
Направляющее колесо 1 установлено на оси Г-образного рычага 2, который подвижно установлен на шлицах опоры 3. Опора 3 закреплена неподвижно в корпусе 4. Гидроцилиндр 5 установлен на резьбе в корпусе 4 и соединен каналом Е с внутренней полостью Г-образного рычага 2. В центральном отверстии штока поршня-разделителя 6 на резьбе установлена заглушка 7, закрытая снаружи кожухом 8. Односторонний клапан 9 установлен в канале М, соединяющем компенсационную камеру 10 с гидравлической полостью цилиндра 5. Дренажная пробка 11 установлена в заправочном отверстии компенсационной камеры. Золотник 12 переключателя 13 соединен с рулевой колонкой машины (не показана). Редукторы давления 14 и 15 обеспечивают различный уровень давления воздуха на выходе. Дроссель 16 и клапан 17 дополняют систему управления. Компрессор 18, манометр 19, пневмобаллон 20 входят в штатную пневмосистему машины. Краны 21 и 22 используются в ходе ремонтных работ ходовой части.
Работа МНГ
При прямолинейном движении машины золотник 12 подключает редуктор пониженного давления 14. В этом случае сжатый воздух из пневмобаллона 20 поступает в воздушную полость гидроцилиндра 5. Поршень-разделитель жидкой и воздушной сред 6 под действием давления сжатого воздуха перемещается, рабочая жидкость по каналу Е в опоре 4 поступает в полость Г-образного рычага 2. Рычаг с направляющим колесом 1 перемещается на шлицах опоры 3 и обеспечивает натяжение гусеницы, отвечающее режиму движения. Поворот рулевой колонки при поворотах машины переключает золотник 12 на редуктор повышенного давления 15, что обеспечивает увеличение давления жидкости в гидроцилиндре 5 и повышение усилия натяжения гусеницы в режиме подтяга. При выходе машины из поворота рулевая колонка возвращает золотник переключателя 13 в исходное положение на редуктор давления 14. Избыточный воздух из гидроцилиндра 5 через дроссель 16 и клапан 17 уходит в атмосферу, при этом обеспечивается давление воздуха в цилиндре 5, отвечающее режиму прямолинейного движения машины. МНГ работает в автоматическом режиме, не требующем вмешательства водителя в его функционирование. Заправка рабочей жидкости в механизм натяжения осуществляется на стадии его сборки через центральное отверстие в штоке поршня-разделителя 6 при демонтированной заглушке 7. Для предотвращения смешивания жидкой и воздушной сред, которая является причиной появления пузырей воздуха в гидроцилиндре, в поршне-разделителе 6 между уплотнениями выполнена цилиндрическая проточка, соединенная посредством радиального дренажного канала Н и центрального отверстия в заглушке 7 с атмосферой. Для компенсации рабочих утечек жидкости в канале М, соединяющем компенсационную камеру 10 с гидравлической полостью цилиндра 5, установлен односторонний клапан 9. Дозаправка жидкости в камеру 10 осуществляется при регламентном обслуживании МНГ через отверстие, закрытое дренажной пробкой 11. При выполнении ремонтных работ ходовой части натяжение гусениц снимается путем перекрытия краном 21 всех магистралей воздухопитания механизма. После этого открывается кран 22 и сжатый воздух выпускается из воздушной полости цилиндра 5.
Применение предлагаемого МНГ позволяет обеспечить автоматическое натяжение гусениц при прямолинейном движении и поворотах, снизить трудоемкость технического обслуживания ходовой части и повысить надежность ее работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ НАТЯЖЕНИЯ ГУСЕНИЦЫ С ЭЛЕКТРОПРИВОДОМ | 2011 |
|
RU2464198C1 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2004 |
|
RU2279371C2 |
| ШАРНИР ГУСЕНИЧНОЙ ЦЕПИ | 2013 |
|
RU2529936C1 |
| УСТАНОВКА КОМПРЕССОРА НА ТРАНСПОРТНОЙ МАШИНЕ | 2010 |
|
RU2425234C1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2190552C2 |
| Управляемый снаряд, блок рулевого привода управляемого снаряда, пневмораспределительное устройство рулевого привода управляемого снаряда, механизм инициирования рулевого привода управляемого снаряда | 2017 |
|
RU2669979C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПНЕВМО-ТОРСИОННОЙ ПОДВЕСКИ ГУСЕНИЧНОЙ МАШИНЫ | 2013 |
|
RU2537928C1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1987 |
|
RU2031039C1 |
| ГУСЕНИЦА С АВТОНОМНЫМ ШАРНИРОМ | 2012 |
|
RU2520692C1 |
| МЕХАНИЗМ НАТЯЖЕНИЯ ГУСЕНИЦЫ | 1973 |
|
SU408846A1 |

Изобретение относится к области гусеничной техники и может использоваться в конструкции ходовой части быстроходных машин. Механизм автоматического натяжения гусениц включает устройство регулирования положения направляющего колеса относительно корпуса машины, при этом Г-образный рычаг с направляющим колесом установлен посредством подвижного шлицевого соединения на неподвижной опоре корпуса механизма. Внутренняя полость Г-образного рычага соединена посредством канала в опоре рычага с гидравлической полостью цилиндра, в котором установлен подвижно поршень-разделитель жидкой и газовой сред. Воздушная полость цилиндра соединена магистралью с автоматическим переключателем подачи сжатого воздуха из штатной пневмосистемы машины. В центральном отверстии штока поршня-разделителя может быть установлена на резьбе заглушка, центральное отверстие которой соединяет радиальный дренажный канал поршня от цилиндрической проточки между его уплотнениями с атмосферой. Достигается автоматическое натяжение гусениц во время прямолинейного движения машины и при ее поворотах. 1 з.п. ф-лы, 3 ил.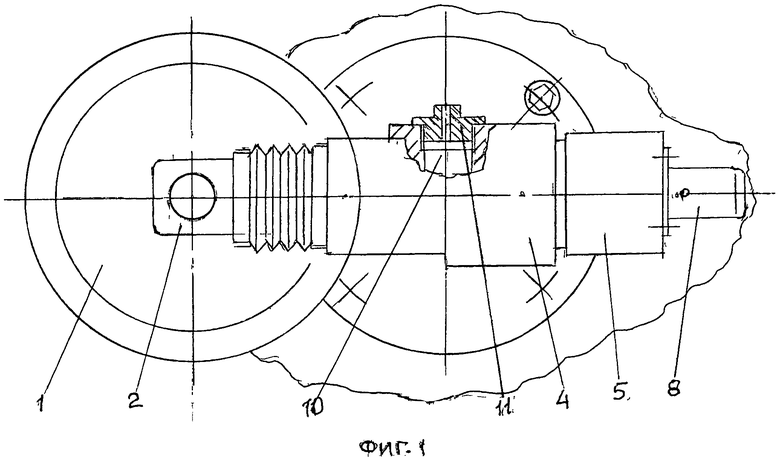
1. Механизм автоматического натяжения гусениц, включающий устройство регулирования положения направляющего колеса относительно корпуса машины, отличающийся тем, что Г-образный рычаг с направляющим колесом установлен посредством подвижного шлицевого соединения на неподвижной опоре корпуса механизма, а внутренняя полость Г-образного рычага соединена посредством канала в опоре рычага с гидравлической полостью цилиндра, в котором установлен подвижно поршень-разделитель жидкой и газовой сред, воздушная полость цилиндра соединена магистралью с автоматическим переключателем подачи сжатого воздуха из штатной пневмосистемы машины.
2. Механизм по п.1, отличающийся тем, что в центральном отверстии штока поршня-разделителя установлена на резьбе заглушка, центральное отверстие которой соединяет радиальный дренажный канал поршня от цилиндрической проточки между его уплотнениями с атмосферой.
| Подвеска направляющего колеса гусеничного транспортного средства | 1989 |
|
SU1705174A1 |
| Способ получения сорбента | 1985 |
|
SU1308378A1 |
| Устройство для натяжения гусеницы транспортного средства | 1990 |
|
SU1717469A2 |
| JP 2013208953 A, 10.10.2013 | |||
| GB 1220374 A, 27.01.1971 | |||
| Щелевой фильтр | 1974 |
|
SU513709A1 |

