Перекрестная ссылка на родственные заявки
По данной заявке испрашивается приоритет предварительной заявки США № 60/891,932 от 27 февраля 2007 года, которая полностью содержится в данном документе в качестве ссылки.
Область техники
Настоящее изобретение, в целом, относится к электронным устройствам передачи электроэнергии и, в частности, к измерению и использованию в реальном времени полного сопротивления линии электропередачи, используемой для передачи электрической энергии.
Уровень техники
Электрическая энергия передается по энергетической системе потребителям посредством сети линий электропередачи. Эти линии электропередачи охватывают различные типы местности и огромное множество постоянно меняющихся условий окружающей среды, причем сами линии изменяются по материалам и конструкции. Изменяются не только условия работы, но и энергия, передаваемая по линии электропередачи, также изменяется на основе предложения и спроса энергии. Это вызывает изменения в температуре этих линий, что приводит к провисанию (при этом увеличивается длина и уменьшается площадь поперечного сечения), когда температура линий возрастает. По этим причинам линии электропередачи, как правило, имеют динамически изменяющиеся свойства, такие как полное сопротивление, которое переменным образом воздействует на их рабочие характеристики по времени.
Одной важной характеристикой линии электропередачи является допустимая токовая нагрузка в амперах, которая является результатом измерения величины электрического тока, протекающего по линии электропередачи при конкретных ограничениях температуры и при конкретных условиях окружающей среды. Допустимая токовая нагрузка линии электропередачи основана на многих факторах, включающих в себя физические и электрические свойства проводника, а также температуру, ветер и другие условия окружающей среды. Так как свойства линии электропередачи (например, полное сопротивление) изменяются, допустимая нагрузка по току также изменяется. В настоящее время, системы передачи энергии не в состоянии учитывать все важные динамические свойства линии электропередачи, что приводит к недогрузке линий электропередачи. Это может быть значимой проблемой, если линии электропередачи перегружены, когда линии работают на максимуме или почти на максимуме своих возможностей. В Соединенных Штатах, например, стоимость перегрузки в линиях электропередачи может превышать 8 миллиардов долларов в год. Стоимость подачи энергии возрастает в случаях перегрузки, так как энергия должна приобретаться от генераторов, расположенных ближе к нагрузке, и, следовательно, по более высоким ценам. Соответственно, значительная экономия может быть получена каждый год посредством увеличения допустимой токовой нагрузки перегруженных линий электропередачи.
Соответственно, в настоящее время необходима технология определения более точного полного сопротивления линий электропередачи в реальном времени, позволяющая проводить точную оценку свойств линии электропередачи (таких как допустимая токовая нагрузка). Это обеспечит многие преимущества, включающие в себя более эффективное использование линий электропередачи, а также определение обрывов и определение стабильности линии электропередачи.
Сущность изобретения
Чтобы получить точное определение в реальном времени характеристического полного сопротивления участка линии электропередачи, согласно вариантам осуществления изобретения, измеряют рабочее состояние, по меньшей мере, для двух местоположений на линии электропередачи. Это состояние включает в себя напряжение и ток в линии электропередачи для этих местоположений и соответствующую разность фаз, при этом измерения синхронизируются так, что они измеряются в один и тот же момент времени. Данные, полученные из синхронизированных измерений, затем вводятся в модель схемы линии электропередачи, чтобы получить параметры характеристического полного сопротивления для линии электропередачи согласно модели схемы. Это дает в результате набор значений, которые описывают характеристическое полное сопротивление для измеренного участка линии электропередачи.
Результирующее характеристическое полное сопротивление линии электропередачи может использоваться для ряда целей, включающих в себя защиту локальной и обширной области, а также непосредственное управление обратной связью энергетической системы. Например, с помощью более точной информации о динамическом полном сопротивлении линии электропередачи оператор может увеличить или уменьшить электрическую мощность, доставляемую по линии электропередачи, на основе более лучшего понимания допустимой токовой нагрузки линии электропередачи. Кроме того, это позволяет произвести более точную оценку мест обрыва и, таким образом, резко уменьшает время простоя. Более того, информация, полученная в результате непрерывного вычисления параметров полного сопротивления (которые могут включать в себя компоненты сопротивления, индукции и емкости), коэффициентов затухания и мест комплексных собственных значений, позволяет оператору выполнять в реальном времени оценку стабильности энергетической системы.
Краткое описание чертежей
Изобретение поясняется описанием со ссылками на прилагаемые чертежи, на которых:
Фиг.1 изображает схему системы измерения линии электропередачи в соответствии с вариантом осуществления изобретения;
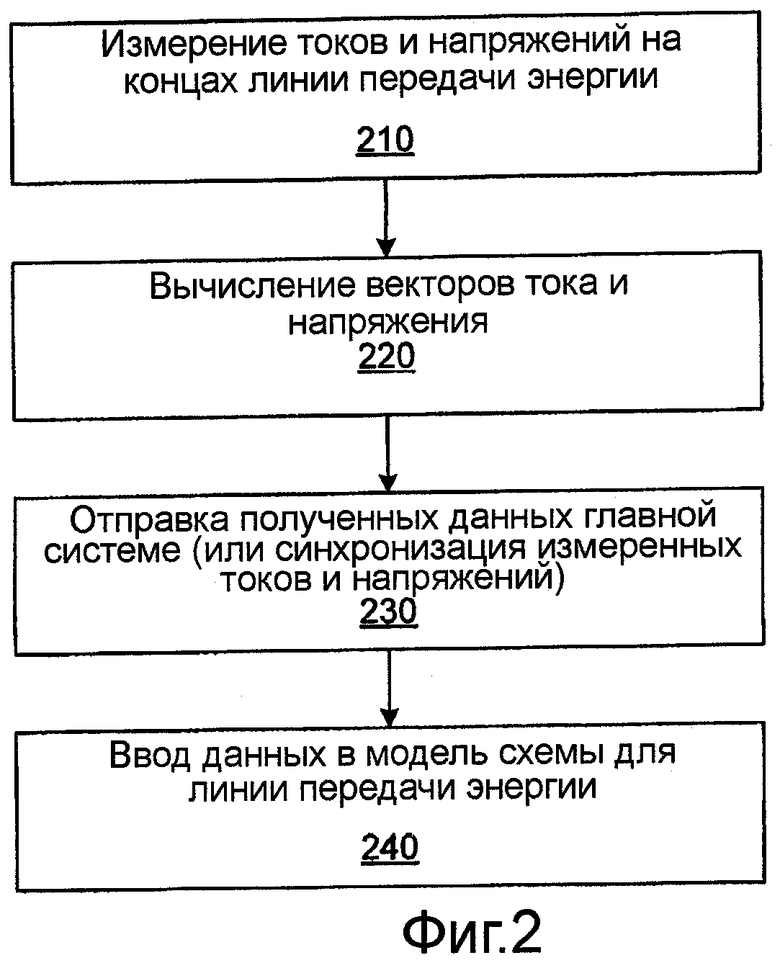
Фиг.2 - блок-схему способа измерения полного сопротивления между двумя местоположениями на линии электропередачи в соответствии с вариантом осуществления изобретения;
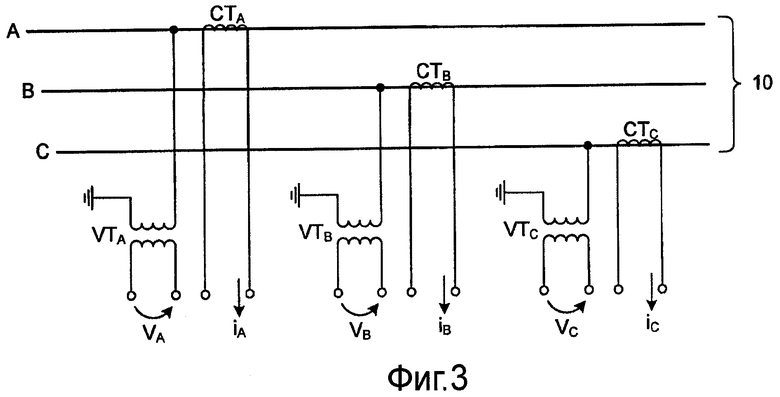
Фиг.3 - схему устройства дистанционного измерения для измерения тока и напряжения в местоположении на линии электропередачи в соответствии с вариантом осуществления изобретения;
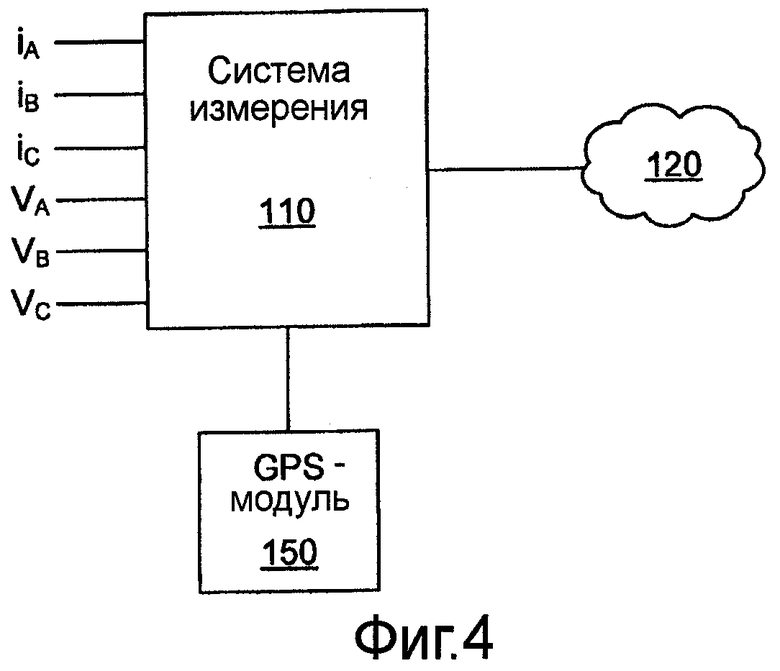
Фиг.4 - схему системы измерения в соответствии с вариантом осуществления изобретения;
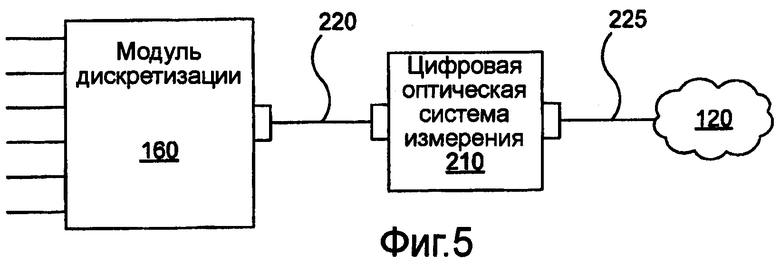
Фиг.5 - схему цифровой оптической системы измерения в соответствии с другим вариантом осуществления изобретения;
Фиг.6 - схему модели электрической схемы полного сопротивления линии электропередачи в соответствии с вариантом осуществления изобретения.
Чертежи изображают различные варианты осуществления настоящего изобретения только в целях иллюстрации. Специалисты в данной области техники должны понимать из последующего обсуждения, что альтернативные варианты осуществления структур и способов, иллюстрированных в данном документе, могут быть реализованы без отступления от принципов изобретения, описанных в данном документе.
Подробное описание предпочтительных вариантов воплощения
Согласно вариантам осуществления изобретения осуществляют измерения в разных местоположениях на линии электропередачи, чтобы определить характеристическое полное сопротивление для участка линии электропередачи между двумя местоположениями. Это характеристическое полное сопротивление может быть выражено как оценки набора параметров согласно модели схемы линии электропередачи, такой как π-схема. Эти оценки параметров могут также обновляться с регулярными интервалами (например, в 50 или 60 Гц), таким образом, обеспечивая точную оценку в реальном времени динамического полного сопротивления линии электропередачи. Представления могут быть либо обобщенным параметром, либо распределенными типами моделей.
На Фиг.1 показана упрощенная схема линии 10 электропередачи, которая обеспечивает передачу электрической энергии, генерированной в первом местоположении генератором 20. Линия 10 электропередачи передает электрическую энергию по линии 10 электропередачи в другое местоположение, где эта энергия потребляется нагрузкой 30. В практических реализациях может быть понятно, что линия 10 электропередачи может включать в себя любое число генераторов 20 и различные неодинаковые нагрузки 30, и может быть любая комбинация веток и узлов, чтобы сформировать сеть линий 10 электропередачи или энергетическую систему.
На Фиг.1 также показана система для определения в реальном времени полного сопротивления линии 10 электропередачи в соответствии с вариантом осуществления изобретения, содержащая набор систем 110 измерения. Каждая система 110 измерения размещена в конкретном местоположении на линии 10 электропередачи. Каждая система 110 измерения может быть объединена с или прикреплена к датчику 115, который может быть подключен к линии 10 электропередачи, чтобы измерять напряжение и/или ток линии 10 электропередачи в этом местоположении. Соответственно, датчики 110, подключенные к линии 10 электропередачи, предоставляют дискретные значения напряжения и тока линии электропередачи соответствующим системам 110 измерения. Каждая система 110 измерения, в свою очередь, сконфигурирована так, чтобы выполнять любую требуемую обработку этих данных, как описано ниже, и затем пересылать данные по сети 120 главной системе 130. В главной системе 130 эти данные обрабатываются, чтобы определять в реальном времени полное сопротивление участка или части линии 10 электропередачи между двумя местоположениями на линии 10, откуда данные были приняты. Дополнительная информация может быть получена из непосредственных измерений напряжения и тока, в том числе активной и реактивной мощности и абсолютной разности фаз в каждой из трех фаз.
Системы 110 измерения и датчики 115 могут быть размещены на линии 10 электропередачи в любом местоположении, которое может быть конечной точкой сегмента линии 10 электропередачи, для которого должно быть вычислено полное сопротивление. В более сложных энергетических системах может использоваться любое число систем 110 измерения и датчиков 115. Системы 110 измерения могут быть соединены с главной системой 130 локальной вычислительной сетью, глобальной вычислительной сетью (такой как Интернет), сотовой или другой беспроводной сетью или любой подходящей сетью связи.
На Фиг.2 представлена блок-схема способа определения в реальном времени полного сопротивления линии 10 электропередачи, например, с помощью системы, проиллюстрированной на фиг.1. В этом способе, датчики 115 измеряют на шаге 210, на каждом конце участка линии 10 электропередачи, ток и напряжение в соответствующих местоположениях на линии 10 электропередачи. В одном варианте осуществления линия 10 электропередачи содержит трехфазную линию электропередачи, в таком случае датчики 115 измеряют напряжение и ток для каждой из фаз линии 10 в каждом местоположении. Каждый датчик может выполнять последовательности измерений напряжения и тока и затем отправлять полученные данные соответствующей системе 110 измерения. В одном варианте осуществления, каждый датчик 115 управляется своей соответствующей системой 110 измерения и выполняет измерения со скоростью, достаточной, чтобы захватить высокочастотные компоненты ассоциированных сигналов (например, около 60 кГц).
В каждой системе 110 измерения используются выборки данных для измеренных токов и напряжений, чтобы вычислять на шаге 220 векторы для тока и напряжения. В одном варианте осуществления векторы вычисляются с помощью часов (например, сигнал "top of second") от GPS-модуля 150, чтобы синхронизировать начало отчетного периода. IEEE-стандарт C37.118 определяет нулевой фазовый угол, когда максимум косинусоидальной волны при номинальной частоте совпадает с верхним секундным пиком. Каждый производитель PMU может определять абсолютный фазовый угол любым способом на свой выбор. Один общий способ описан Phadke. Типичное устройство измерения вектора электрических величин (PMU) предоставляет 12 векторов, которые включают в себя величину и угол для трех напряжений и трех токов.
Системы 110 измерения могут также сопоставлять данные с временными отметками, чтобы указывать, когда данные были получены, а также предоставлять информацию о местоположении и/или данные об окружающей среде (например, температуру и скорость ветра) для своих соответствующих местоположений. Системы 110 измерения могут дополнительно оцифровывать данные и затем отправлять на шаге 230 данные главной системе 130 через сеть 120. Как описано более подробно ниже, главная система затем вводит на шаге 240 данные в модель линии 10 электропередачи, чтобы получать оценку полного сопротивления участка линии 10 электропередачи между двумя местоположениями. Оцененное полное сопротивление может быть выведено в различных полезных целях, включающих в себя отображение оператору, сохранение в базе данных на материальном машиночитаемом носителе и/или для использования другой системой или для дополнительной обработки.
Время, требуемое для того, чтобы пакеты достигли главной системы 130, изменяется (типично, от 10 до 150 мс). Следовательно, данные выравниваются по времени в главной системе 130 перед тем, как выполняются вычисления. В одном варианте осуществления это выравнивание выполняется посредством использования временных меток, связанных с данными, которые предоставлены устройствами 110 измерения.
Следует понимать, что возможны вариации в этой основной архитектуре системы и способе работы. Например, система 110 измерения может сама измерять токи и напряжения, устраняя необходимость в отдельных датчиках 115. Дополнительно, системы 110 измерения могут выполнять большую или меньшую обработку данных сами, оставляя оставшуюся часть требуемой обработки выполнять главной системе 130. Более того, необходимость в главной системе 130 может быть устранена полностью посредством перемещения ее функций обработки в одну или более систем 110 измерения.
На Фиг.3 показан один вариант выполнения датчика 115 на фиг.1. Как показано, линия 10 электропередачи содержит трехфазный проводник, где фазы переносятся по отдельным линиям, обозначенным A, B и C. Датчик 115, следовательно, конфигурирован так, чтобы измерять напряжение и ток для каждой фазы. В этом варианте осуществления датчик 115 содержит трансформатор VT напряжения и трансформатор CT тока, соединенный с каждой линией A, B и C. Таким образом, трансформатор VTA напряжения измеряет напряжение линии A, трансформатор CTA тока измеряет ток через линию A и т.д. Трансформаторы VT и CT выгодно понижают соответствующие напряжения и токи линии 10 электропередачи до уровня, который может управляться традиционной схемой, и обеспечивают безопасность персонала, работающего на подстанциях.
На Фиг.4 показана система 110 измерения, конфигурированная так, чтобы принимать аналоговые сигналы, представляющие напряжения и токи трех фаз линии 10 электропередачи, проиллюстрированной на фиг.3. Как указано выше, система 110 измерения конфигурирована так, чтобы дискретизировать сигналы напряжения и тока, чтобы получить цифровые данные, представляющие напряжения и токи для линии 10 электропередачи в этом местоположении. Система 110 измерения может также содержать логику для преобразования информации о напряжении и токе в векторные измерения, включающие в себя напряжение, ток, мощность, частоту, активную и реактивную мощность и абсолютную разность фаз и другие полученные измерения.
Система 110 измерения может дополнительно связывать данные о напряжении и токе с временной отметкой так, что данные могут быть синхронизированы с данными, полученными в другом местоположении на линии 10 и другой системой 110 измерения. В одном варианте осуществления, система измерения получает временную отметку от GPS-модуля 150, соединенного с или содержащегося в системе 110 измерения. Одним преимуществом получения временной отметки из GPS-модуля 150 является то, что каждая из систем 110 измерения, распределенных по линии 10 электропередачи, будет синхронизирована, так как каждая будет получать временную отметку из одного и того же сигнала GPS-спутников. Этот сигнал является очень точным, точнее одной микросекунды (так как импульс имеет ширину 10 нс). Система 110 измерения может дополнительно получать информацию о местоположении от GPS-модуля 150 и связывать эту информацию о местоположении с данными, которые она получает от линии 10 электропередачи. В других вариантах осуществления могут быть использованы другие технологии обнаружения местоположения или фактическое местоположение может быть вручную запрограммировано в систему 110 измерения или хост-систему 130, когда устанавливаются системы 110 измерения.
Таким образом, система 110 измерения обеспечивает синхронизированные по времени измерения напряжения, тока, мощности, частоты и разности фаз в стандартном цифровом формате. После того, как данные получены, они передаются главной системе 130 через сеть 120. Как указано выше, может использоваться любое подходящее сетевое соединение.
На Фиг.5 показан альтернативный вариант осуществления системы 210 измерения, которая конфигурирована так, чтобы принимать цифровые данные через оптическую среду. В этом варианте осуществления система включает в себя модуль 160 дискретизации, соединенный с датчиком 115, для дискретизации измерений напряжения и тока с линии 10 электропередачи. Модуль 160 дискретизации содержит логику для управления дискретизацией аналоговых сигналов напряжения и тока, выполнения аналогово-цифрового преобразования дискретных значений и мультиплексирования цифровых данных в волоконно-оптическую линию 220. Цифровая оптическая система 210 измерения принимает цифровые данные и обрабатывает данные, например, как аналоговая аналогичная система 110 (фиг.4). Цифровая оптическая система 210 измерения затем передает обработанные данные через сеть 120 хост-системе 130, предпочтительно с помощью другой волоконно-оптической линии 225.
Преимущества конфигурации, показанной на фиг.5, включают в себя возможность выполнять дискретизацию рядом с линией 10 электропередачи, которая переносит относительно высокое напряжение и ток. Система 210 измерения в этом случае может быть расположена далеко от фактической линии 10 электропередачи, которая может создавать помехи электронным компонентам вычислительной системы. Использование волоконных линий 220 и 225 для передачи сигналов, вместо электрических проводов, также помогает уменьшить электрическую интерференцию от линии 10 электропередачи.
В другом варианте осуществления один или более датчиков измеряют напряжения и токи и затем оцифровывают эту информацию на высоковольтной стороне линии 10 электропередачи без необходимости понижать напряжения и/или токи. Дискретизированные цифровые данные могут затем быть переданы системе измерения для дополнительной обработки.
В другом варианте осуществления напряжения и токи измеряются на линии 10 электропередачи непосредственно с помощью энергии, переданной по волоконно-оптической линии к высоковольтной стороне измерительных трансформаторов, и затем цифровые данные передаются по волоконно-оптической линии локальному приемнику на подстанции. Цифровые данные могут быть обработаны системой измерения, чтобы вычислять векторы измерений тока и напряжения. Все три фазы связаны с системой измерения так, что положительные, отрицательные и нулевые последовательности также могут быть вычислены. Система датчиков для измерения напряжения и тока линии электропередачи, непосредственно использующая волоконный кабель, предложена фирмой Arbiter Systems, Пасо-Роблес, Калифорния. Один из стандартных продуктов, продаваемых Arbiter Systems, для выполнения измерений вектора электрических величин, называется 1133a Power Sentinel.
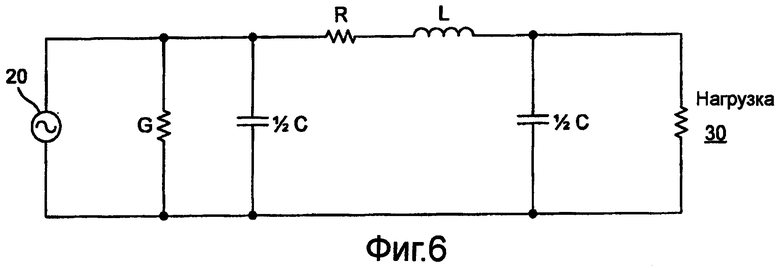
После того как данные о напряжении и токе получены, их вводят в модель, чтобы оценить характеристическое полное сопротивление линии электропередачи. В одном варианте осуществления линия электропередачи моделируется посредством π-схемы, пример которой показан на фиг.6. В этой модели π-схемы генератор 20 возбуждает энергию к нагрузке 30 через сеть, содержащую одно или более сопротивлений, емкостей и индуктивностей. В этом примере π-схема включает в себя шунтирующее (или заземляющее) сопротивление G, последовательное сопротивление R, последовательную индуктивность L и шунтирующую емкость C. Однако понятно, что вариации в этой модели возможны и могут использоваться в других вариантах осуществления. Например, шунтирующая емкость C может быть смоделирована как одна электрическая емкость либо со стороны последовательного сопротивления и/или последовательной индуктивности либо она может быть разделена на множество параллельных емкостей, как показано на фиг.6.
Параметры G, R, L и С в π-схеме представляют собой данные измерения полного сопротивления линии 10 электропередачи. В вариантах осуществления технологий, описанных в данном документе, эти параметры неизвестны, так как полное сопротивление линии 10 электропередачи может изменяться по времени. Соответственно, модель, используемая, чтобы определять эти параметры для линии 10 электропередачи, основана на динамических измерениях в реальном времени, выполненных в различных местоположениях на линии 10 электропередачи, как описано выше.
Схема на фиг.6 может быть представлена набором дифференциальных уравнений с частными производными, как кратко изложено в публикации Ilic & Zaborszky, Dynamics and Control of Large Electric Power Systems, Wiley Interscience (2000), cc. 74-75. Уравнения могут также быть представлены в формате вектора электрических величин, а также аппроксимированы как векторные дифференциальные уравнения, как объяснено ниже:
где  - характеристическое полное сопротивление известно, а
- характеристическое полное сопротивление известно, а  является постоянной распространения, l является длиной линии электропередачи. Эти уравнения связывают вектор напряжения и тока в одном местоположении на линии электропередачи (т.е.
является постоянной распространения, l является длиной линии электропередачи. Эти уравнения связывают вектор напряжения и тока в одном местоположении на линии электропередачи (т.е.  и
и  ) и вектор напряжения и тока в другом местоположении на линии электропередачи (т.е.
) и вектор напряжения и тока в другом местоположении на линии электропередачи (т.е.  и
и  ) с характеристическим полным сопротивлением (т.е. ) линии электропередачи между этими двумя местоположениями. С помощью модели линии электропередачи, показанной на фиг.6, характеристическое полное сопротивление связывается с параметрами G, R, L и C согласно уравнениям:
) с характеристическим полным сопротивлением (т.е. ) линии электропередачи между этими двумя местоположениями. С помощью модели линии электропередачи, показанной на фиг.6, характеристическое полное сопротивление связывается с параметрами G, R, L и C согласно уравнениям:
где
Точные измерения напряжения и тока в двух местоположениях на линии электропередачи могут быть использованы для решения, параметры G, R, L и C для модели линии электропередачи могут быть определены в реальном времени на основе данных, измеренных в двух разных местоположениях на линии электропередачи.
Могут быть использованы различные хорошо известные математические способы, чтобы решить эти уравнения и получить в реальном времени идентификацию характеристического полного сопротивления. В одном примере вычислительная система принимает набор данных, которые содержат синхронизированные дискретные значения напряжений и токов в двух разных местоположениях на линии 10 электропередачи. Чтобы получить характеристическое полное сопротивление, которое дает наименьшую ошибку между данными и моделью обеспечивают наилучшее соответствие для модели. Наилучшее соответствие может быть получено с помощью любого числа известных способов, таких как подбор методом наименьших квадратов, который минимизирует площадь вектора ошибок, и итерационные методы уменьшения ошибки посредством выбора разных значений для характеристического полного сопротивления. Так как характеристическое полное сопротивление может содержать множественные параметры (например, четыре параметра G, R, L и C в модели на фиг.6), алгоритм минимизации ошибок может найти наиболее соответствующее характеристическое полное сопротивление посредством регулирования каждого из этих параметров. Хорошо известен и может использоваться для этого определения ряд многомерных нелинейных методов аппроксимации кривых.
После того, как выполнено точное определение в реальном времени характеристического полного сопротивления линии электропередачи, может быть успешно выполнен ряд полезных применений. Например, допустимая токовая нагрузка линии электропередачи, как правило, определяется посредством величины провисания в линии электропередачи. Это провисание является функцией времени и температуры и может быть оценено на основе теплопроводности линии. Провисание изменяется в течение дня на основе температуры, скорости ветра и влажности (из-за термического коэффициента теплоотдачи провода). Допустимая токовая нагрузка является также функцией полного сопротивления линии электропередачи. Например, может использоваться коэффициент теплового расширения, чтобы вычислить эффективное увеличение в длине линии из-за увеличения в значении R последовательного сопротивления. Следовательно, зная полное сопротивление линии электропередачи, оператор может отрегулировать энергию, передаваемую по линии электропередачи, чтобы повысить эффективное использование этой линии электропередачи. Посредством определения допустимой токовой нагрузки линии в реальном времени дополнительная емкость линии может быть предложена на энергетических рынках в качестве горячего резерва.
В другом варианте осуществления, после того, как представление сосредоточенных параметров π-схемы определено, как описано выше, возможно также вычислить характеристические значения этой схемы в реальном времени. Это является чем-то похожим на способ Прони, но использует скорее нелинейное представление схемы вместо линейного дифференциального уравнения второго порядка. Одним способом вычисления характеристических значений является линеаризация текущего значения уравнений схемы вокруг текущего значения параметров полного сопротивления. Тогда характеристические значения могут быть определены непосредственно из линейного дифференциального уравнения. Это может быть выполнено, по меньшей мере, в двух стандартных пакетах программного обеспечения: MatLab и MathCad.
В другом варианте осуществления, выполняется движущееся в реальном времени окно быстрых преобразований Фурье (FFT) измерений угла, мощности и частоты линии электропередачи. Оно может вычислять FFT разности между частотами на любом конце линии. Это очень небольшое значение, порядка 0,001-0,003 Гц; однако, FFT этого разностного сигнала может использоваться, чтобы найти форму колебаний PI-схемы. Более подробно это описано в заявке США № 11/008,632 от 8 декабря 2004 года.
В другом варианте осуществления потеря фактической мощности в линии электропередачи вычисляется с помощью вычисленного характеристического полного сопротивления. Эта вычисленная потеря фактической мощности может затем быть использована, чтобы вычислить базовую предельную цену (LMP) в реальном времени, связанную с потерей передаваемой мощности для соответствующего сегмента энергетической системы. Одной формулой для вычисления является:
где X - это характеристическое полное сопротивление.
Предшествующее описание вариантов осуществления изобретения было представлено в целях иллюстрации; оно не предназначено быть исчерпывающим или ограничивать изобретение раскрытыми точными формами. Специалисты в этой области техники должны понимать, что в свете вышеописанного раскрытия возможны многие модификации и вариации.
Некоторые части этого описания описывают варианты осуществления изобретения с точки зрения алгоритмов и символьных представлений операций с информацией. Эти алгоритмические описания и представления обычно используются специалистами в области обработки данных, чтобы эффективно передавать сущность своей работы другим специалистам в данной области техники. Эти операции, описанные функционально, в вычислительном отношении или логически, понимаются как необходимые для реализации посредством компьютерных программ или эквивалентных электрических схем, микрокода или т.п. Кроме того, также может быть удобным ссылаться на эти структуры как на модули, без потери их назначения. Описанные операции и связанные с ними модули могут быть осуществлены в программном обеспечении, микропрограммном обеспечении, аппаратных средствах или любых их комбинациях.
Любые из этапов, операций или процессов, описанных в данном документе, могут быть выполнены или реализованы с помощью одного или более аппаратных или программных модулей, автономно или в комбинации с другими устройствами. В одном варианте осуществления программный модуль реализован с помощью компьютерного программного продукта, включающего в себя машиночитаемый носитель, содержащий код компьютерной программы, который может быть исполнен процессором компьютера для выполнения любого или всех описанных этапов, операций или процессов.
Варианты осуществления изобретения могут также относиться к устройству для выполнения операций. Это устройство может быть специально сконструировано для требуемых целей и/или оно может содержать вычислительное устройство общего назначения, выборочно активируемое или переконфигурируемое компьютерной программой, сохраненной в компьютере. Такая компьютерная программа может быть сохранена на материальном машиночитаемом носителе хранения или любом типе носителей, подходящих для хранения электронных инструкций и подключаемых к системной шине компьютера. Кроме того, любые вычислительные системы, упомянутые в описании, могут включать в себя один процессор или могут быть архитектурами, применяющими многопроцессорные схемы для повышения вычислительной способности.
Варианты осуществления изобретения могут также относиться к компьютерному сигналу данных, осуществленному в несущей, при этом компьютерный сигнал данных включает в себя любой вариант осуществления компьютерного программного продукта или другую комбинацию данных, описанную в данном документе. Компьютерный сигнал данных является продуктом, который представлен на материальном носителе или несущей и модулирован или иначе закодирован в несущей, которая является реальной и передается любым подходящим способом.
В заключение, язык, использованный в описании, был принципиально выбран с целью удобочитаемости и учебных целях, и он не предназначен, чтобы обозначать пределы или ограничивать предмет изобретения. Заявленный объем изобретения не должен быть ограничен подробным описанием, а пунктами формулы изобретения. Соответственно, раскрытые варианты осуществления изобретения предназначены быть иллюстративными, но не ограничивают объем защиты, который изложен в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ МОНИТОР ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ В РЕАЛЬНОМ ВРЕМЕНИ | 2014 |
|
RU2649224C2 |
| ДАТЧИК, СПОСОБ И СИСТЕМА ТЕКУЩЕГО КОНТРОЛЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2007 |
|
RU2437105C2 |
| КОРРЕКЦИЯ СМЕЩЕНИЯ МАГНИТНОГО ПОТОКА ДЛЯ ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2011 |
|
RU2566499C2 |
| СПОСОБ И УСТРОЙСТВО ДИСТАНЦИОННОЙ ЗАЩИТЫ ОТ ЗАМЫКАНИЙ НА ЗЕМЛЮ | 2009 |
|
RU2526844C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ | 2012 |
|
RU2552891C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ | 2012 |
|
RU2585377C2 |
| Способ дистанционного определения места короткого замыкания на линии электропередачи и устройство для его осуществления (варианты) | 2023 |
|
RU2813208C1 |
| УПРАВЛЕНИЕ ДВИЖЕНИЕМ В ЛИНЕЙНОМ УСКОРИТЕЛЕ (LINAC), УПРАВЛЯЕМОМ С ПОМОЩЬЮ MRI | 2015 |
|
RU2675678C1 |
| ИСПЫТАТЕЛЬНАЯ СИСТЕМА ДИНАМИЧЕСКОГО МОДЕЛИРОВАНИЯ ЭЛЕКТРОМАГНИТНОГО ПЕРЕХОДНОГО ПРОЦЕССА ГРОЗ | 2014 |
|
RU2624614C2 |
| УСТРОЙСТВО, СПОСОБ И СИСТЕМА ДЛЯ РЕКОНСТРУКЦИИ 3D-МОДЕЛИ ОБЪЕКТА | 2015 |
|
RU2642167C2 |
Группа изобретений относится к электротехнике, в частности к системам измерения полного сопротивления линии электропередачи. Способ определения полного сопротивления линии электропередачи включает в себя проведение множества синхронных измерений токов и напряжений на двух концах линии, уточнение величин измеренных напряжений и токов, а также оценку полного характеристического сопротивления линии с учетом параметров ее эквивалентной схемы, вычисление значения полного характеристического сопротивления. Устройство, реализующее данный способ, содержит множество датчиков напряжения и тока, позволяющих проводить многократные замеры в двух заранее выбранных местоположениях на линии электропередачи, множество систем измерения, каждая из которых предназначена для приема набора измеренных напряжений и токов, главную систему, принимающую и обрабатывающую данные, поступающие от группы систем измерений. При этом получаемые главной системой напряжения и токи синхронны во времени, а сама система обеспечивает уточнение измеренных величин путем регулирования одного или более параметров эквивалентной схемы линии электропередачи. Также главная система вычисляет на основе измеренных значений токов и напряжений полное характеристическое сопротивление для участка линии электропередачи. Техническим результатом группы изобретений является повышение точности измерения полного сопротивления линии электропередачи. 2 н. и 18 з.п. ф-лы, 6 ил.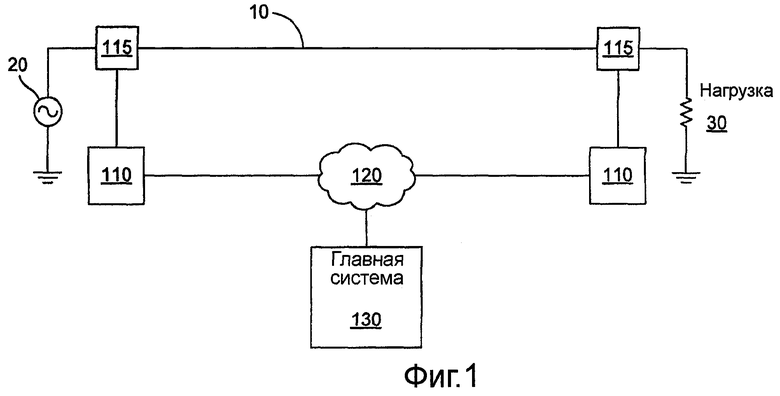
1. Способ определения в реальном времени полного сопротивления линии электропередачи, содержащий этапы, на которых:
измеряют множество раз напряжение и ток в первом местоположении на линии электропередачи;
измеряют множество раз напряжение и ток во втором местоположении на линии электропередачи, при этом измеренные напряжения и токи в первом и втором местоположениях синхронизированы по времени;
подгоняют измеренные напряжения и токи первого и второго местоположений к модели схемы для линии электропередачи путем регулирования одного или более параметров модели схемы;
оценивают характеристическое полное сопротивление линии электропередачи между первым и вторым местоположениями на основе параметров модели схемы; и
выводят оцененное характеристическое полное сопротивление.
2. Способ по п.1, дополнительно содержащий этап, на котором:
вычисляют векторы измеренных напряжений и токов из первого и второго местоположений, при этом вычисленные векторы используют при подгонке.
3. Способ по п.1, в котором моделью схемы линии электропередачи является π-схема.
4. Способ по п.1, в котором параметры модели схемы содержат шунтирующее сопротивление, последовательное сопротивление, последовательную индуктивность и шунтирующую емкость.
5. Способ по п.1, в котором измерение напряжений и токов в первом и втором местоположениях содержит этапы, на которых:
получают измеренные напряжения и токи на уровнях напряжения и тока, близких линии электропередачи;
оцифровывают измеренные напряжения и токи; и
передают оцифрованные измеренные напряжения и токи по волоконно-оптической линии передачи.
6. Способ по п.1, дополнительно содержащий этап, на котором:
вычисляют допустимую токовую нагрузку в амперах в реальном времени для линии электропередачи на основе оцененного характеристического полного сопротивления.
7. Способ по п.1, дополнительно содержащий этап, на котором:
определяют местоположение обрыва в линии электропередачи на основе оцененного характеристического полного сопротивления.
8. Способ по п.1, дополнительно содержащий этап, на котором:
вычисляют степень стабильности линии электропередачи, используя собственные (характеристические) значения, вычисленные на основе оцененного характеристического полного сопротивления.
9. Способ по п.1, дополнительно содержащий этап, на котором:
вычисляют степень стабильности линии электропередачи на основе быстрого преобразования Фурье разности между частотами в первом и втором местоположениях на линии электропередачи.
10. Способ по п.1, дополнительно содержащий этап, на котором:
вычисляют в реальном времени базовую предельную цену, связанную с потерей передаваемой мощности для линии электропередачи, на основе оцененного характеристического полного сопротивления.
11. Система измерения для определения в реальном времени полного сопротивления линии электропередачи, содержащая:
множество датчиков, причем каждый датчик конфигурирован для измерения напряжения и тока в первом и втором местоположениях, соответственно на линии электропередачи, множество раз;
множество систем измерения, каждая система измерения конфигурирована для приема набора измеренных напряжений и токов от датчика; и
главную (хост) систему для приема данных, представляющих измеренные напряжения и токи, от группы систем измерений, причем измеренные напряжения и токи для первого и второго местоположений синхронизированы во времени, причем главная (хост) система дополнительно конфигурирована для подгонки измеренных напряжений и токов к модели схемы для линии электропередачи путем регулирования одного или более параметров модели схемы и оценки по ним характеристического полного сопротивления для участка линии электропередачи.
12. Система по п.11, в которой каждая система измерения конфигурирована для вычисления векторов измеренных напряжений и токов и передачи вычисленных векторов главной системе.
13. Система по п.11, в которой моделью схемы линии электропередачи является π-схема.
14. Система по п.11, в которой параметры модели схемы содержат шунтирующее сопротивление, последовательное сопротивление, последовательную индуктивность и шунтирующую емкость.
15. Система по п.11, в которой датчики конфигурированы для получения измеренных напряжений и токов на уровнях напряжения и тока, близких линии электропередачи, оцифровки измеренных напряжений и токов и передачи оцифрованных измеренных напряжений и токов по волоконно-оптической линии в систему измерения.
16. Система по п.11, в которой главная (хост) система дополнительно конфигурирована для вычисления в реальном времени допустимой токовой нагрузки для линии электропередачи на основе оцененного характеристического полного сопротивления.
17. Система по п.11, в которой главная (хост) система дополнительно конфигурирована для определения местоположения обрыва в линии электропередачи на основе оцененного характеристического полного сопротивления.
18. Система по п.11, в которой главная (хост) система дополнительно конфигурирована для вычисления степени стабильности линии электропередачи с помощью характеристических значений, вычисленных на основе оцененного характеристического полного сопротивления.
19. Система по п.11, в которой главная (хост) система дополнительно конфигурирована для вычисления степени стабильности линии электропередачи на основе быстрого преобразования Фурье разности между частотами в первом и втором местоположениях на линии электропередачи.
20. Система по п.11, в которой главная (хост) система дополнительно конфигурирована для вычисления в реальном времени базовой предельной цены, связанной с потерей передаваемой мощности для линии электропередачи на основе оцененного характеристического полного сопротивления.
| RU 2006108737 C1, 20.03.2006 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕКУЩИХ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКОГО РЕЖИМА ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ ДЛЯ ПОСТРОЕНИЯ ЕЕ Г-ОБРАЗНОЙ АДАПТИВНОЙ МОДЕЛИ | 2005 |
|
RU2289823C1 |
| RU 2007102106 C1, 19.01.2007 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА И ХАРАКТЕРА ПОВРЕЖДЕНИЯ В ЭЛЕКТРИЧЕСКОЙ СИСТЕМЕ С ИСПОЛЬЗОВАНИЕМ МОДЕЛЕЙ ВХОДЯЩИХ В НЕЕ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 1989 |
|
RU2033623C1 |
| US 5450328 A1, 12.09.1995 | |||
| US 20060142964 A1, 29.06.2006 | |||
| US 6879917 B2, 12.04.2005 | |||
| US 20050141682 B2, 08.12.2004 | |||
| DE 10163405 A1, 04.07.2002. | |||

