ИСПРАШИВАНИЕ ПРИОРИТЕТА
[0001] По этой заявке испрашивается приоритет предварительной заявки на патент США № 62/090,601, озаглавленной ʺMOTION MANAGEMENT IN MRI-GUIDED LINACʺ за авторством Франсуа Эбер (Francois Hebert), поданной 11 декабря 2014, которая полностью включена в настоящее описание путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Это раскрытие относится к медицинским системам и, в частности, к магнитно-резонансным или другим системам визуализации или радиотерапии.
УРОВЕНЬ ТЕХНИКИ
[0003] Радиационная терапия (также называемая радиотерапией) может использоваться при лечении рака или других патологий. Линейный ускоритель (ʺLinacʺ) может использоваться в радиотерапии для направления луча излучения в желаемое место на пациенте. Linac может направлять фотоны (например, в виде рентгеновских лучей), электроны или другие субатомные частицы к цели, такой как злокачественная опухоль. Лучу излучения может быть придана форма, совпадающая с формой опухоли, например, путем использования многолепесткового коллиматора (например, который может включать в себя несколько вольфрамовых лепестков, которые могут перемещаться независимо друг от друга для создания одной или нескольких определенных форм луча излучения).
[0004] Поскольку здоровые клетки могут быть повреждены или уничтожены во время радиотерапии заданной цели, может быть желательно минимизировать излучение на здоровые ткани. Диагностическая визуализация может помочь в этом стремлении. Системы визуализации, такие как компьютерная томография (CT), флуороскопия и магнитно-резонансная томография (ʺMRIʺ или ʺMR томографияʺ) могут использоваться для определения местоположения (локализации) или отслеживания цели. Пример радиотерапевтической системы, интегрированной с системой визуализации, может включать в себя систему MRI-Linac (такую, которая может использоваться для радиотерапии, управляемой с помощью MRI), которая может быть выполнена с возможностью использования трехмерных (3D) изображений цели, такой как опухоль, при радиотерапии для обеспечения излучения для цели, при этом сокращая или минимизируя излучение для других тканей.
[0005] Система MRI-Linac может включать в себя ускоритель, который может быть выполнен с возможностью вращения на кольцевом гентри вокруг системы MRI. Пациент, который должен быть подвергнут терапии, может быть расположен на поверхности (например, стола, кровати или кушетки), которая может быть расположена в центре внутри системы MRI-Linac. MRI может обеспечивать пространственную карту водородных ядер в тканях пациента, и изображения могут быть получены в двумерной (2D) плоскости или в 3D объеме. Медицинские работники, такие как онкологи, могут предпочесть методики визуализации MRI-Linac, потому что MRI может обеспечивать превосходный контраст мягких тканей без использования ионизирующего излучения.
[0006] Например, в LINAC, управляемом с помощью MRI, может быть желательно локализовать положение цели и подвергающихся риску органов (OAR) непосредственно во время терапии. Это может обеспечить стратегии синхронизации или отслеживания для компенсации движения, когда луч включен. В некоторых режимах работы это может быть достигнуто путем получения последовательных 2D MRI срезов, например, чередующихся аксиальных, корональных и сагиттальных срезов. Эти 2D срезы могут использоваться для непосредственного получения 3D движения цели с использованием методик прямой сегментации или регистрации. Эти подходы могут иметь следующие ограничения: 1) может иметься значительное движение вне плоскости, которое может быть трудно локализовать с помощью 2D срезов; 2) срезы, как правило, имеют в центре цель, что делает трудным одновременно отслеживать подвергающиеся риску органы (OAR); и 3) только информация в 2D срезах собирается во время терапии, что затрудняет выполнение вычисления дозы, например, офлайновое ретроспективное вычисление дозиметрии для адаптивной радиотерапии (компенсация дозы использует полную 3D информацию об анатомии пациента за некоторое время).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] MR визуализация может выполняться «в режиме реального времени» (например, «онлайн», «постоянно» или «непрерывно») во время радиотерапии, например, для обеспечения местоположения цели и информации о движении, например, 3D деформации и/или 3D вращения для подачи луча излучения. Цель, которая должна отслеживаться, может включать в себя орган, такой как простата, или опухоль, относящуюся ко всему или части органа. При обработке изображений один путь определения, что цель находится в движении, состоит в том, что местоположение цели изменяется относительно ее фона на изображении. Методики обработки изображений для локализации, отслеживания или предсказания местоположения цели могут включать в себя вычитание изображения, например, которое может включать в себя использование одной или нескольких абсолютных разностей или использование детектирования краевых, угловых элементов изображения или представляющей интерес области (ROI) изображения.
[0008] Быстрая и точная 3D локализация и отслеживание цели могут быть важны во время радиотерапии, например, для учета движения пациента (например, движения органа и/или движения опухоли). Движение цели, например, 3D деформация и/или 3D вращение, может быть вызвано одним или несколькими источниками, такими как дыхание пациента (например, дыхательный цикл), рефлекс (например, кашель, недержание газов и т.д.), намеренное или неумышленное движение пациента или другое ожидаемое или неожиданное движение цели.
[0009] Это раскрытие описывает методики, которые могут оценивать 3D движение по серии 2D срезов MRI. Как описано более подробно ниже, эти методики могут включать в себя две основных стадии: 1) стадию обучения, на которой строится модель преобразования, которая связывает 2D срезы с 3D движением; и 2) стадию отслеживания, на которой выполняется 3D отслеживание в режиме реального времени на основании модели преобразования, построенной на стадии обучения. Эти методики могут оценивать полностью 3D движение по 2D срезам для обеспечения текущего изменения, например, одного или нескольких из: 3D местоположения, 3D деформации и/или 3-D вращения цели в режиме реального времени.
[0010] В одном примере это раскрытие направлено на реализованный с помощью компьютера способ управления адаптивной радиационной терапией, управляемой изображением в режиме реального времени, по меньшей мере, части области пациента. Реализованный с помощью компьютера способ содержит этапы, на которых получают множество данных об изображениях в режиме реального времени, соответствующих двумерным (2D) изображениям магнитно-резонансной томографии (MRI), включающим, по меньшей мере, часть области, выполняют оценку 2D поля движения по множеству данных об изображениях, выполняют аппроксимацию оценки трехмерного (3D) поля движения, включающей в себя применение модели преобразования к оценке 2D поля движения, определяют, по меньшей мере, одно изменение в режиме реального времени, по меньшей мере, части области на основании аппроксимированной оценки 3D поля движения, и управляют терапией, по меньшей мере, части области с использованием определенного, по меньшей мере, одного изменения.
[0011] В одном примере это раскрытие направлено на систему для управления адаптивной радиационной терапией, управляемой изображением в режиме реального времени, по меньшей мере, части области пациента. Система содержит систему адаптации терапии и схему контроллера терапии. Система адаптации терапии выполнена с возможностью получения множества данных об изображениях в режиме реального времени, соответствующих двумерным (2D) изображениям магнитно-резонансной томографии (MRI), включающим в себя, по меньшей мере, часть области, выполнения оценки 2D поля движения по множеству данных об изображениях, выполнения аппроксимации оценки трехмерного (3D) поля движения, включающей в себя применение модели преобразования к оценке 2D поля движения, и определение, по меньшей мере, одного изменения в режиме реального времени, по меньшей мере, части области на основании аппроксимированной оценки 3D поля движения. Схема контроллера терапии выполнена с возможностью управления терапией, по меньшей мере, части области с использованием определенного, по меньшей мере, одного изменения.
[0012] Эта сущность изобретения является сущностью некоторых из идей настоящей заявки, она не должна рассматриваться как единственное или исчерпывающее описание предмета настоящего изобретения. Дополнительные подробности касательно предмета настоящего изобретения могут быть найдены в подробном описании и прилагаемой формуле изобретения. Другие аспекты изобретения будут очевидны для специалистов в области техники после прочтения и понимания следующего подробного описания и рассмотрения чертежей, которые являются его частью, каждый из которых не должен рассматриваться в ограничивающем смысле. Объем настоящего изобретения определяется прилагаемой формулой изобретения и ее юридическими эквивалентами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] На чертежах, которые не обязательно нарисованы в масштабе, подобные числа могут описывать аналогичные компоненты в разном виде. Подобные числа, имеющие буквенные суффиксы или различные буквенные суффиксы, могут представлять собой различные экземпляры аналогичных компонентов. Чертежи в общем иллюстрируют путем примера, но не путем ограничения различные варианты осуществления, обсуждаемые в настоящем документе. Такие варианты осуществления являются демонстративными и не должны рассматриваться как исчерпывающие или единственные варианты осуществления настоящих устройств, систем или способов.
[0014] Фиг. 1A является примером радиотерапевтического устройства, которое может использоваться для реализации различных методик этого раскрытия.
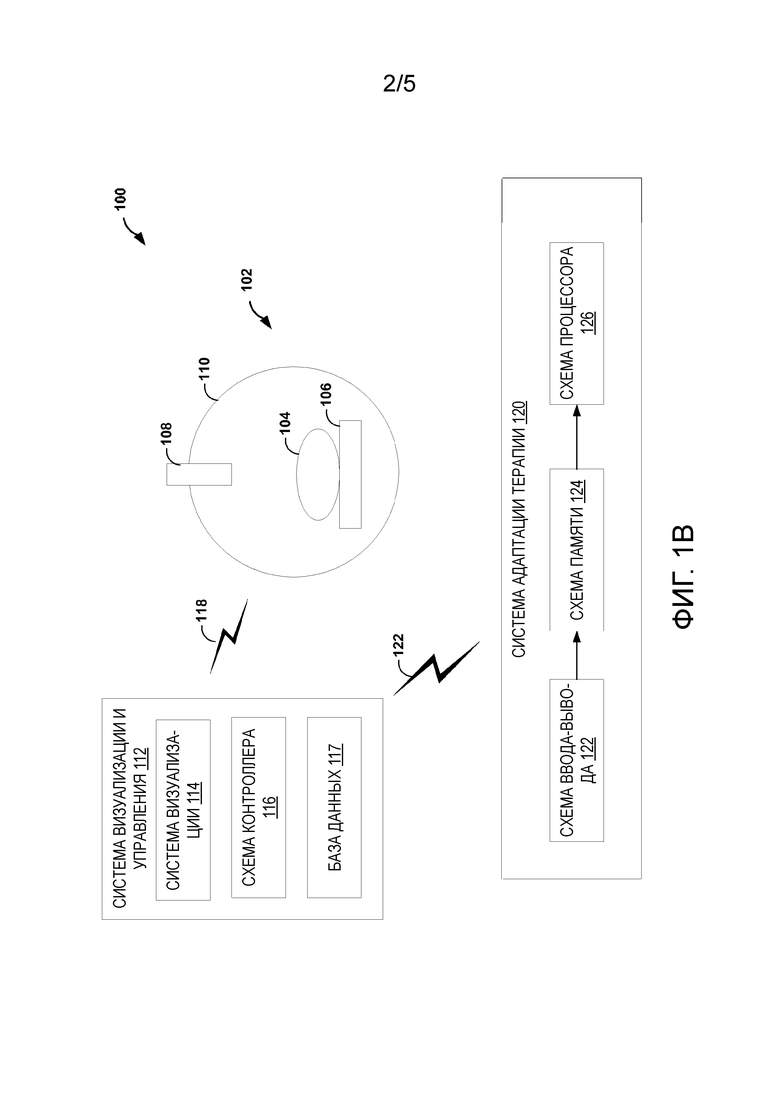
[0015] Фиг. 1B является примером частей системы, которая может использоваться для обеспечения управления с помощью изображения в режиме реального времени в соответствии с различными методиками этого раскрытия.
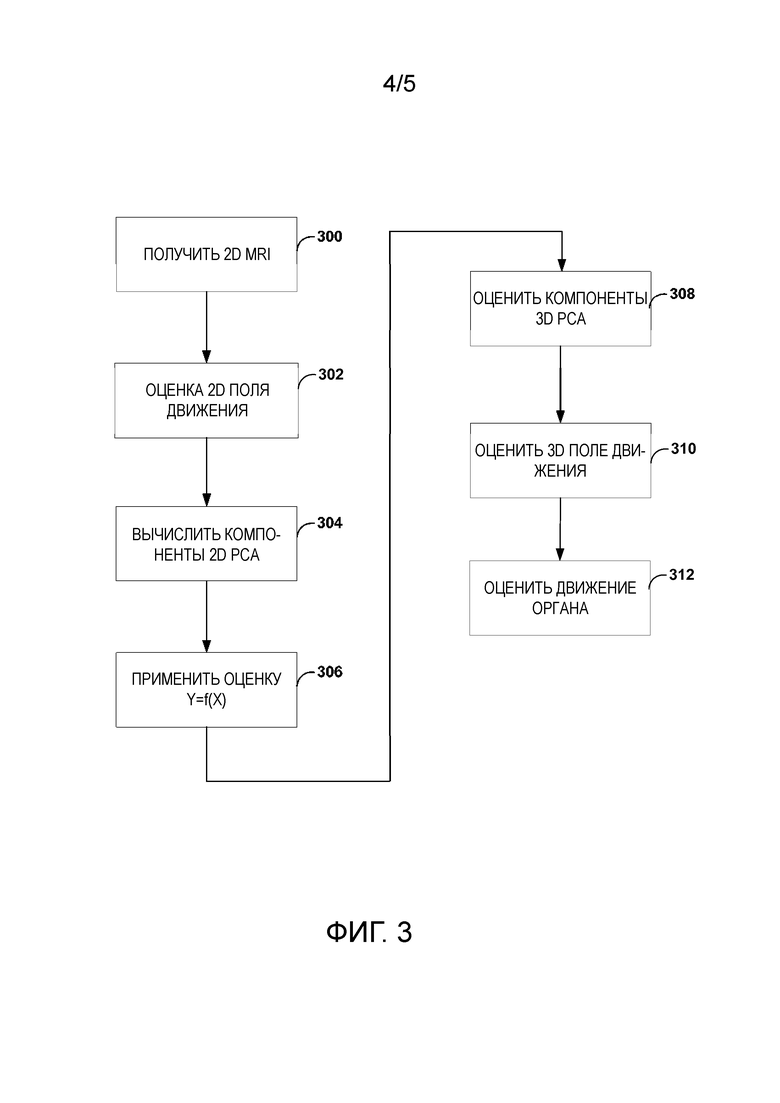
[0016] Фиг. 2 является блок-схемой последовательности операций, изображающей пример методики, которая может использоваться для построения модели преобразования, которая может связать 2D срезы с ранее полученными объемами данных о 3D изображениях.
[0017] Фиг. 3 является блок-схемой последовательности операций, изображающей пример методики, которая может использоваться для оценки 3D изображения в режиме реального времени пациента с использованием модели преобразования, построенной в соответствии с блок-схемой последовательности операций на фиг. 2.
[0018] Фиг. 4 изображает пример частей радиотерапевтической системы.
ПОДРОБНОЕ ОПИСАНИЕ
[0019] Фиг. 1A изображает пример радиотерапевтического устройства, например, линейного ускорителя 10, в соответствии с некоторыми вариантами осуществления настоящего раскрытия. С использованием линейного ускорителя 10 пациент 42 может быть расположен на столе 43 для пациента для получения дозы облучения, определенной с помощью плана лечения. Линейный ускоритель 10 может включить в себя излучающую головку 45, которая генерирует луч 46 излучения. Излучающая головка 45 целиком может быть вращающейся, например, вокруг горизонтальной оси 47. В одном примере под столом 43 для пациента может быть обеспечен плоский сцинтилляционный детектор 44, который может вращаться синхронно с излучающей головкой 45, например, вокруг изоцентра 41. Пересечение оси 47 с центром луча 46, создаваемым излучающей головкой 45, может называться «изоцентром». Стол 43 для пациента может быть механизирован, так что пациент 42 может быть расположен так, чтобы область с опухолью была в или вблизи от изоцентра 41. Излучающая головка 45 может вращаться вокруг гентри 47 для обеспечения пациента 42 множеством варьирующихся доз излучения, например, в соответствии с планом лечения.
[0020] Фиг. 1B является примером частей системы 100 визуализации или радиотерапии, например, LINAC, управляемого с помощью MRI, который может использоваться для обеспечения управления с помощью изображений в режиме реального времени в соответствии с различными методиками этого раскрытия. В частности, система 100 на фиг. 1B может использовать изображения, полученные в режиме реального времени для управления или адаптации плана лечения с помощью радиотерапии в режиме реального времени. Система 100 может включать в себя терапевтическое устройство 102 (например, радиотерапевтическое устройство, которое может включать в себя линейный ускоритель (ʺLinacʺ)).
[0021] Пациент 104 может быть расположен на опоре 106 для пациента, такой как стол, кушетка или другая поверхность. Опора 106 для пациента может быть выполнена с возможностью изменения местоположения, например, относительно одного или нескольких других компонентов терапевтического устройства 102, например, для поднятия или изменения продольного положения пациента 104. Излучение может испускаться из источника 108 терапевтического излучения (например, ускоренные частицы, такие как рентгеновские лучи или протоны) по направлению к пациенту 104. В одном примере источник 108 излучения может быть выполнен с возможностью перемещения, например, вращения вокруг пациента 104, например, с использованием вращающейся опоры 110 (например, гентри), к которой может крепиться источник 108 терапевтического излучения. Источник 108 терапевтического излучения может быть выполнен с возможностью перемещения, например, вращения, например, с использованием элемента или манипулятора, который может быть соединен с терапевтическим устройством 102 и источником 108 терапевтического излучения. Терапевтическое устройство 102 в варианте осуществления может быть линейным ускорителем "Linac" (например, как показано и описано в отношении фиг. 1A), который может быть выполнен с возможностью направления луча рентгеновского излучения на цель (например, злокачественную опухоль) пациента 104.
[0022] Кроме того, система 102 может включать в себя систему 112 визуализации и управления (например, аппарат магнитно-резонансной томографии (MRI)), которая включает в себя систему 114 визуализации и схему 116 контроллера терапии (также называемого в этом раскрытии «схемой 116 контроллера» или «контроллером 116»), осуществляющего связь с терапевтическим устройством 102, как изображено с помощью молнии 118 (например, молния 118 может быть проводным или беспроводным соединением). Система 112 визуализации и управления также может включать в себя базу 117 данных, например, для хранения полученных изображений. Система 114 визуализации может включать в себя аппарат магнитно-резонансной томографии (MRI), который может использоваться в комбинации с терапевтическим устройством 102 (например, для обеспечения системы MRI-линейный ускоритель (ʺMRI-Linacʺ). Устройство MRI может использоваться для предоставления информации визуализации, которая может использоваться для управления или адаптации терапии пациента 104. Одна или несколько других систем визуализации могут дополнительно или альтернативно быть включены или использоваться с системой 102 или системой 114 визуализации, например, система компьютерной томографии (CT).
[0023] Система 114 визуализации может получать, например, трехмерные (3D) изображения пациента. Например, во время стадии планирования терапии работник здравоохранения, например, врач, медсестра, дозиметрист или техник могут управлять системой 102 для получения данных о 3D изображениях для планирования до терапии пациента, например, через систему 114 визуализации. Данные о 3D изображениях для планирования могут быть полезными при определении точного местоположения представляющей интерес области пациента, например, цели. В качестве другого примера, непосредственно перед терапией, например, спустя несколько дней после того, как было получено 3D изображение для планирования, работник здравоохранения может управлять системой 102 для получения нового 3D изображение, которое может использоваться во время терапии. Кроме того, во время терапии пациента 104 система 114 визуализации может получать множество одномерных (1D) линий, двумерных (2D) срезов или 3D объемных изображений MRI, включающих, по меньшей мере, часть области (которые при объединении могут сформировать 3D изображение области).
[0024] Контроллер 116 может управлять одним или несколькими аспектами системы 102. Например, контроллер 116 может управлять местоположением пациента, например, через опору 106 пациента, управлять дозой излучения, испускаемой источником 108 излучения, управлять или адаптировать форму апертуры луча для отслеживания цели и/или управлять перемещением и/или расположением источника 108 излучения.
[0025] Как было описано выше, система MRI-Linac может иметь свою собственную схему 116 контроллера для управления как визуализацией, так и Linac. Однако в иллюстративных реализациях, в которых система 114 визуализации является системой CT, контроллер системы CT может не управлять Linac. Таким образом, отдельные контроллеры управляют системой CT и Linac.
[0026] Система 102 может включать в себя систему 120 адаптации терапии (TAS), осуществляющую связь с системой 112 визуализации и управления, как изображено с помощью молнии 122. TAS 120 может принимать ранее полученный объем данных о 3D изображениях, например, из снимков MRI или компьютерной томографии, которые соответствует 3D изображению, полученному системой 114 визуализации. TAS может включать в себя схему 122 ввода/вывода для приема и передачи данных, схему 124 памяти для буферизации и/или хранения данных и схему 126 процессора. Схема 124 памяти, которая может быть любым соответствующим образом организованным хранилищем данных, может принимать данные об изображениях от системы 112 визуализации и управления. Схема 124 памяти может принимать данные об изображениях через беспроводное или проводное соединение, через традиционные порты данных и также может включить в себя схему для приема аналоговых данных об изображениях и схему аналого-цифрового преобразования для оцифровки данных об изображениях. Схема 124 памяти может предоставлять данные об изображениях схеме 126 процессора, которая может реализовывать функциональность настоящего изобретения в аппаратном обеспечении, программном обеспечении или их комбинации на универсальном компьютере. В одном варианте осуществления схема 126 процессора может быть графическим процессором (GPU).
[0027] Как описано более подробно ниже и в соответствии с этим раскрытием, TAS 120 может оценивать 3D движение по серии 2D срезов, полученных в режиме реального времени, например, с использованием MRI, для адаптации плана лечения с помощью радиотерапии в режиме реального времени. На стадии обучения TAS 120 может построить модель преобразования, которая связывает 2D срезы с ранее полученными объемами данных о 3D изображениях, например, полученных с использованием MRI или CT. На стадии отслеживания TAS 120 может выполнять 3D отслеживание в режиме реального времени на основании модели преобразования, построенной на стадии обучения. TAS 120 может определять, изменила ли область, например цель, местоположение, а затем выводить информацию системе 112 визуализации и управления, которая может позволять схеме 116 контроллера терапии управлять терапией в ответ на определенное изменение положения.
[0028] Фиг. 2 является блок-схемой последовательности операций, изображающей пример методики, которая может использоваться для построения модели преобразования, которая может связывать 2D срезы с ранее полученными объемами данных о 3D изображениях. Блок-схема последовательности операций на фиг. 2 может представлять собой стадию обучения, на которой TAS 120 может создавать модель преобразования, которая может связывать 2D срезы с 3D движением. Сначала TAS 120 может получить набор полученных данных о 4D изображениях (блок 200) от системы 112 визуализации и управления. Данные об изображениях могут быть получены с использованием методик CT или MR томографии. Данные о 4D изображениях включают в себя объемы данных о 3D изображениях, полученных за период времени. Опционально, TAS 120 может использовать данные о 4D изображениях со стадии обучения для заполнения любых частей изображения, которые отсутствуют, когда TAS 120 позже использует 2D срезы во время стадии отслеживания.
[0029] Из данных о 4D изображениях TAS 120 может извлечь 2D срезы (блок 202) и выполнить оценку 3D поля движения между моментами времени, которые могут служить конечными точками периода времени (блок 204). Обращаясь сначала к оценке 3D поля движения (блок 204), чтобы количественно оценить движение в 4D данных 200 изображений, TAS 120 может извлечь первый опорный объем данных о 3D изображениях. По мере того, как объемы данных о 3D изображениях развиваются во времени, изменения между двумя объемами данных об изображениях могут быть охарактеризованы как деформация, задаваемая векторным полем деформации. TAS 120 может выполнить оценку 3D поля движения, например, путем вычисления векторных полей деформации (DVF) для того, чтобы найти деформацию между каждым последующим объемом данных о 3D изображениях и опорным объемом данных о 3D изображениях. В некоторых примерах деформация может быть деформацией от пиксела к пикселу (или от воксела к вокселу) во времени, где каждый пиксел (или воксел) может иметь вектор деформации, который задает его перемещение от одного 3D изображения к следующему 3D изображению, например, если у пациента была очень небольшая кальцификация, вектор может задавать, как эта кальцификация перемещалась. Если деформация отсутствует, все векторы деформации пикселов (или вокселов) равны нулю. Если деформация присутствует, векторы деформации пикселов (или вокселов) указывают в различных направлениях.
[0030] В одном примере схема 126 процессора TAS 120 может использовать методику нелинейной регистрации для определения деформации. В одном примере схема 126 процессора может вычислять DVF для каждого пиксела (или воксела) в изображении. В одном примере схема 126 процессора может вычислять DVF для пикселов (или вокселов) в представляющей интерес области, например, в конкретной цели или подвергающемся риску органе, например, сегментированного или другого изображения. В некоторых случаях для уменьшения сложности вычислений TAS 120 может использовать жесткую регистрацию вместо деформируемой регистрации.
[0031] После того, как TAS 120 вычисляет DVF, у TAS 120 имеется набор DVF, которые описывают, как орган движется, например, смещается, и/или вращается, и/или деформируется во время дыхания. Набор DVF может включать в себя значительное количество информации, которая может быть в вычислительном отношении сложной для обработки. Для упрощения вычислений схема 126 процессора TAS 120 может уменьшить размерность набора DVF, если это необходимо.
[0032] Вначале схема 126 процессора TAS 120 может применить методику уменьшения размерности к DVF. Как можно видеть на фиг. 2, методика уменьшения размерности может включать в себя применение анализа главных компонентов (PCA) к 3D данным поля движения (блок 206). Применение PCA к DVF приводит к набору главных компонентов или коэффициентов, которые задают векторы. Затем, используя заранее заданный критерий, такой как заранее заданная величина изменений или заранее заданная желаемая точность реконструированного поля деформаций, TAS 120 может уменьшить размерность путем выбора одного или нескольких компонентов PCA из набора главных компонентов (блок 208). В одном примере точность может быть задана как показатель разницы между реконструированным полем деформаций и полем деформаций, которое дала регистрация.
[0033] Методики уменьшения размерности не ограничиваются использованием PCA. Другие неограничивающие примеры методик уменьшения размерности включают в себя: анализ независимых компонентов (ICA), ядерный PCA, анализ канонических корреляций, локально-линейное вложение (LLE), LLE с использованием гессиана, карты собственных значений лапласиана, выравнивание локальных тангенциальных пространств, развертку максимумальной дисперсии и максимально информативные размерности.
[0034] Как указано выше, TAS 120 может извлечь 2D срезы из объема данных о 4D изображениях (блок 202). Как и с объемами данных о 3D изображениях, TAS 120 может выполнить оценку 2D поля движения, например, вычисляя DVF для нахождения деформации между последовательными данными 2D изображений (2D срезами) (блок 210).
[0035] В некоторых примерах TAS 120 может выбрать произвольные срезы в пределах объема данных о 4D изображениях. В других примерах TAS 120 может определить и выбрать ориентацию, такую как плоскость, например, сагиттальную, аксиальную, корональную, которая имеет наибольшую информацию о движении, и выбрать срезы из этой плоскости или другой ориентации. «Плоскость», ассоциированная с конкретным срезом MRI, не обязательно должна быть строго плоской, она может включать в себя некоторую кривизну, например, из-за артефактов искажений MRI, или срез, для которого, по меньшей мере, частично искажение MRI было компенсировано. Например, TAS 120 может обучаться на трех плоскостях и определять, какая плоскость обеспечивает лучшее предсказание 3D движения. В некоторых примерах TAS 120 может выбирать срезы из плоскостей в трех ортогональных направлениях и вычислять DVF в каждой из этих плоскостей.
[0036] После того, как TAS 120 вычислит DVF для данных о 2D изображениях, TAS 120 имеет набор DVF. Для упрощения вычислений схема 126 процессора TAS 120 может уменьшить размерность набора DVF путем применения методики уменьшения размерности к DVF. Методика уменьшения размерности может включать в себя применение TAS 120 PCA к данным 2D поля движения (блок 212) для генерации набора главных компонентов. Затем, с использованием заранее заданного критерия, такого как заранее заданная величина изменений или заранее заданная желаемая точность реконструированного поля деформаций, TAS 120 может уменьшить размерность путем выбора одного или нескольких компонентов PCA из набора главных компонентов (блок 214).
[0037] Например, во время анализа PCA TAS 120 может определить вариацию основных компонентов. В качестве конкретного примера 1-ый главный компонент может быть самым большим и может объяснять 75% изменений, а 2-ой главный компонент может объяснять 10%. Если заранее заданная величина изменений составляет 85%, то TAS 120 может выбрать 1-ый и 2-ой главные компоненты.
[0038] В одном примере точность может быть задана как показатель разницы между реконструированным полем деформаций и полем деформаций, которое дала регистрация.
[0039] После того, как TAS 120 опционально уменьшила размерность как 3D поля движения PCA, так и 2D поля движения PCA, процессор 126 TAS 120 может генерировать многопараметрическую, многомерную функцию f, которая устанавливает соотношение или связывает компоненты 2D PCA и компоненты 3D PCA. Функция f может быть, например, линейной регрессией между столбцом Y, который содержит компоненты 3D PCA векторных полей деформации, и столбцом X, который содержит компоненты 2D PCA, как показано ниже:

где yij является координатой j в базисе главного компонента i временной последовательности в 3D PCA,
xij является координатой j в базисе главного компонента i временной последовательности в 2D PCA,
m является числом замеров во временной последовательности,
n является числом компонентов для 3D PCA, и
p является числом компонентов для 2D PCA для рассматриваемого среза.
[0040] Линейная регрессия может быть показана следующим образом:

где j является координатой j-го компонента в 3D PCA для всех временных последовательностей, и
β является вектором коэффициента регрессии.
[0041] В некоторых примерах методика линейной регрессии является регрессией главных компонентов. Хотя была описана методика линейной регрессии, может использоваться любой тип регрессионного анализа, такой как одна или несколько методик нелинейной регрессии. Процесс не ограничивается линейной регрессией, например, где f является многопараметрической, многомерной функцией.
[0042] Как только TAS 120 вычислила функцию f (блок 216), TAS может вычислить модель, которая связывает 2D срезы с 3D движением (в блоке 218). Модель может включать в себя компоненты 2D PCA и 3D PCA и функцию f, которая их связывает.
[0043] Во время стадии отслеживания TAS 120 может получать 2D срезы с любой ориентацией, например, сагиттальной, сагиттально-аксиальной, сагиттально-аксиально-корональной, если срезы находятся в том же самом анатомическом местоположении, что и местоположение, которое использовалось во время стадии обучения. Затем TAS 120 может вычислять PCA полученных данных об изображениях и использовать модель для отображения данных об изображениях обратно, чтобы увидеть, какой должна быть оценка полного 3D движения.
[0044] В некоторых примерах модель на стадии обучения может быть построена из набора 4D данных MRI. В некоторых таких примерах набор 4D данных MRI может быть получен из фазово- или амплитудно-сгруппированного 4D MRI-сканирования, полученного ранее или непосредственно перед терапией. Данные об изображениях могут быть получены для множества дыхательных циклов, где отдельные дыхательные циклы включают в себя множество частей, и TAS 120 может сгенерировать, по меньшей мере, два объема данных о 3D изображениях, используя центральную тенденцию данных об изображениях в подобных частях. Например, цикл дыхания может быть сгруппирован, и TAS 120 может сгенерировать 3D изображение, беря информацию из одних и тех же интервалов группировки в различных дыхательных фазах. Таким образом, TAS 120 может сгенерировать 4D изображение, усредненное по нескольким дыхательным циклам.
[0045] В других примерах 4D данные MRI могут быть получены из последовательности быстрых 3D MRI-сканирований. В некоторых случаях, например, если данные о 4D изображениях недоступны, 4D данные MRI могут быть смоделированы из статического 3D изображения MRI, например, с помощью некоторых дополнительных гипотез, таких как моделирование динамики движения.
[0046] Фиг. 3 является блок-схемой последовательности операций, изображающей пример методики, которая может использоваться для оценки 3D изображения пациента в режиме реального времени с использованием модели преобразования, построенной в соответствии с блок-схемой последовательности операций на фиг. 2. Блок-схема последовательности операций на фиг. 3 представляет собой стадию отслеживания в режиме реального времени, на которой TAS 120 может аппроксимировать оценку 3D поля движения, включая применение модели преобразования к оценке 2D поля движения, и определять, по меньшей мере, одно изменение в режиме реального времени, например, 3D местоположение, 3D деформацию и/или 3D вращение, по меньшей мере, части цели или области на основании аппроксимированного 3D поля движения.
[0047] На фиг. 3 TAS 120 может получить множество данных об изображениях в режиме реального времени, соответствующих 2D изображениям, например, 2D срезам MRI (блок 300). В некоторых примерах изображения могут включать в себя, по меньшей мере, часть цели. TAS 120 может выполнить оценку 2D поля движения для множества данных об изображениях, например, путем оценки DVF в режиме реального времени (и, следовательно, 3D изображения пациента в режиме реального времени) для нахождения деформации между последовательными данными 2D изображений, например, 2D срезами, (блок 302). Затем, TAS 120 может аппроксимировать оценку 3D поля движения, которая может включать в себя применение модели преобразования к оценке 2D поля движения. Например, TAS 120 может вычислить 2D PCA вновь полученных данных о 2D изображениях, например, 2D срезов (блок 304). Используя модель преобразования, оцененную с помощью функции f, которая связывает 2D PCA и 3D PCA (блок 306), TAS 120 может оценить компоненты 3D PCA (блок 308). Используя оцененные компоненты 3D PCA, TAS 120 может аппроксимировать оценку 3D поля движения в режиме реального времени области пациента (блок 310) и, таким образом, оценить движение цели, например, подвергающегося риску органа (блок 312).
[0048] В некоторых примерах TAS 120 может определить наилучшую ориентацию и местоположение 2D срезов для визуализации пациента во время терапии. Например, TAS 120 может определить подпространство, содержащее максимальную информацию для каждого компонента 3D PCA. Это подпространство может содержать информацию о деформации, которая наиболее сильно коррелирована с объемом данных о 3D изображениях и которая дает наиболее точное предсказание движения. TAS 120 может автоматически выбрать наилучшую ориентацию для выбора 2D среза с использованием этой информации о деформации.
[0049] В некоторых примерах TAS 120 может обеспечивать оценку компонентов 2D PCA в режиме реального времени. Например, вместо вычисления деформируемой регистрации между 2D срезами, TAS 120 может выполнить процесс оптимизации, который может непосредственно оценить координаты текущих срезов в 2D PCA, что будет генерировать наилучшие координаты, которые деформируют текущие срезы в модельный срез.
[0050] Путем определения оцененного движения цели TAS 120 может управлять терапией путем точной синхронизации терапии, если, по меньшей мере, часть области находится вне пределов заранее заданного пространственного окна синхронизации. Кроме того, TAS 120 может управлять терапией путем управления направлением испускаемого излучения устройства оказания терапии для отслеживания области.
[0051] Следует отметить, что, хотя методики описаны как зависящие от пациента, методики этого раскрытия могут быть распространены на общий статистический 3D PCA. В этом случае 3D PCA, определяемый во время стадии обучения, может быть определен на нескольких пациентах.
[0052] Перед отслеживанием в режиме реального времени может быть желательно, чтобы TAS 120 выполнила предварительное совмещение на стадии предварительной обработки, чтобы гарантировать, что первоначально полученные данные о 4D изображениях, из которых была определена модель преобразования, совмещены с текущим положением пациента. Может быть желательно удостовериться, что срезы, используемые во время стадии отслеживания, являются такими же, как использовались во время стадии обучения. Неточное совмещение может произойти, например, если данные о 4D изображениях были получены в предыдущий день.
[0053] В акте предварительного совмещения TAS 120 может определить коррекцию для перемещения пациента между первым сеансом пациента в первый раз, например, на стадии обучения в первый день, и вторым сеансом пациента во второй раз, например, на стадии отслеживания во второй день. TAS 120 может выполнить жесткое совмещение 3D PCA к текущему пациенту. TAS 120 может скорректировать компоненты 3D PCA через различные стратегии переориентации в случае нелинейной регистрации на стадии обучения. В одном примере TAS 120 может определить, какие срезы использовать во время стадии отслеживания, на основании срезов, использовавшихся во время стадии моделирования, для обеспечения согласованности.
[0054] Фиг. 4 изображает пример частей радиотерапевтической системы 400, например, LINAC, управляемого с помощью MRI. Радиотерапевтическая система 400 может включать в себя терапевтическую систему 402, систему 412 визуализации и интерфейс 434 конечного пользователя. Терапевтическая система 402 может включать в себя терапевтическое устройство, например, которое может включать в себя линейный ускоритель (ʺlinacʺ). Linac может быть выполнен с возможностью обеспечения радиотерапии для пациента 408. Пациент 408 может быть расположен на опоре 410 пациента, такой как стол, кушетка или другая поверхность. Опора 410 пациента может быть выполнена с возможностью изменения местоположения, например, относительно одного или нескольких других компонентов linac, например, поднятия или изменения продольного положения пациента 408. В одном примере опора 410 пациента может быть механизированной, так что пациент 408 может быть расположен так, что цель находится в или вблизи от центра терапевтического устройства.
[0055] Излучение может испускаться из источника 406 излучения к пациенту 408. В одном примере источник 406 излучения может быть выполнен с возможностью перемещения, например, вращения вокруг пациента 408, например, путем использования вращающейся опоры 404 (например, гентри или манипулятора), к которой может крепиться источник 406 излучения. Источник 406 излучения может быть выполнен с возможностью направления луча рентгеновского излучения (или других частиц) к цели (например, злокачественной опухоли) пациента 408. Источник 406 излучения может быть выполнен с возможностью вращения, например, для обеспечения пациента 408 множеством доз излучения (например, варьирующихся доз), например, в соответствии с планом лечения.
[0056] Система 412 визуализации может включать в себя устройство 414 визуализации, такое как аппарат магнитно-резонансной томографии (MRI), который может использоваться с терапевтической системой 402 (например, для обеспечения системы MRI-линейный ускоритель (ʺMRI-linacʺ)). Устройство MRI может использоваться для обеспечения информации визуализации, которая может использоваться для определения местоположения цели в пациенте 408, например, для направления радиотерапии в заданное место пациента 408, например, в цель. Система 412 визуализации может дополнительно или альтернативно включать в себя систему компьютерной томографии (CT) или другую систему визуализации. Система 412 визуализации может включать в себя один или несколько датчиков 416. Один или несколько датчиков 416 могут включать в себя плоский детектор (например, детектор рентгеновского излучения), например, который может быть расположен напротив источника рентгеновского излучения. Система 412 визуализации может включать в себя один или несколько входов 418, один или несколько выходов 420, схему 422 процессора, схему 424 памяти, базу 426 данных, схему 428 связи, схему 430 таймера и схему 432 контроллера.
[0057] Система 412 визуализации может получить, например, опорное изображение (например, изображение для планирования терапии) пациента 408, по меньшей мере, с тремя измерениями (например, опорное 3D MR-изображение или опорное 4D MR-изображение). В одном примере информация об опорном 3D MR-изображении может быть получена с помощью системы визуализации. Опорное 3D MR-изображение может быть полезным при определении местоположения представляющей интерес области пациента (например, цели). В одном примере во время курса терапии пациента 408 система 412 визуализации может получить множество одномерных (1D) линий, изображений двумерных (2D) срезов или проекций, 3D MR-изображение (например, 3D изображение объема), или 4D MR-изображение (например, последовательность 3D MR-изображений за некоторый период времени).
[0058] Терапевтическая cистема 402 может быть коммуникационно соединена с системой 412 визуализации и интерфейсом 434 конечного пользователя. Система 412 визуализации может включать в себя, или может быть коммуникационно соединена с интерфейсом 434 конечного пользователя. Это коммуникационное соединение может включать в себя использование одной или нескольких линий связи (например, линии 438 связи), которые, например, могут включать в себя проводной или беспроводной передатчик, схемы приемника или приемопередатчика (например, на каждом конце линии связи), коммуникационную шину, коммуникационную сеть или компьютерную сеть.
[0059] Схема 422 процессора может быть выполнена с возможностью определения информации о локализации (например, местоположении) цели в пациенте 408. Выход 420 может быть выполнен с возможностью предоставления информации, например, о местоположении цели, например, терапевтической системе 402, например, во время радиотерапевтического сеанса пациента 408. Интерфейс 434 конечного пользователя может использоваться медицинским персоналом, например, онкологом-радиологом, дозиметристом или радиологом (например, рентгенологом). В одном примере интерфейс 434 конечного пользователя может включать в себя звуковой/визуальный индикатор (например, монитор). Схема 432 контроллера может быть выполнена с возможностью управления одним или несколькими аспектами системы 412 визуализации. В одном примере схема 432 контроллера может управлять использованием или работой градиентных катушек устройства 414 визуализации, например, указывать ориентацию среза 2D MR-изображения в режиме реального времени. Схема 424 памяти может предоставлять информацию схеме 422 процессора, который может реализовывать методики, описанные в настоящем описании, в аппаратном обеспечении, программном обеспечении или их комбинации на универсальном компьютере. В одном примере схема 422 процессора может включать в себя графический процессор (GPU).
[0060] Этот документ описывает, среди прочего, применение модели преобразования к 2D цели или оценку движения OAR для получения оцененной 3D цели или оценки движения OAR; одна или несколько других методик для оценки 3D движения могут использоваться в комбинации с методиками, описанными в настоящем описании. Например, один или несколько аспектов различных методик, описанных в этом раскрытии, могут быть объединены с одним или несколькими аспектами, описанными в следующих заявках на патент США, которые полностью включены в настоящее описание путем ссылки: 1) заявка на патент США № 62/090,115, озаглавленная ʺMAGNETIC RESONANCE PROJECTION IMAGINGʺ, поданная 10 декабря 2014 (номер в реестре патентного поверенного № 4186.006PRV); 2) заявка на патент США № 62/069,066, озаглавленная ʺREAL TIME ORGAN MOTION PREDICTION DUE TO BREATHING FOR MRI-LINACʺ, поданная 27 октября 2014 (номер в реестре патентного поверенного № 4186.003PRV); 3) заявка на патент США № 62/089,482, озаглавленная ʺMAGNETIC RESONANCE IMAGING TARGET LOCALIZATIONʺ, поданная 9 декабря 2014 (номер в реестре патентного поверенного № 4186.009PRV); и 4) заявка на патент США № 62/069,145, озаглавленная ʺMRI-LINAC REAL-TIME IMAGE GUIDANCE TECHNIQUESʺ, поданная 27 октября 2014 (номер в реестре патентного поверенного № 4186.005PRV).
Дополнительные замечания
[0061] Пример 1 включает в себя предмет изобретения (такой как способ, средство для выполнения действия, машиночитаемую среду (такую как машиночитаемый носитель), содержащую инструкции, которые при выполнении машиной заставляют машину выполнять действия, или устройство, выполненное с возможностью выполнять) для управления адаптивной радиационной терапией, управляемой с помощью изображения в режиме реального времени, по меньшей мере, части области пациента, способ, содержащий получение множества данных об изображениях в режиме реального времени, соответствующих двумерным (2D) изображениям магнитно-резонансной томографии (MRI), включающим в себя, по меньшей мере, часть области; выполнение оценки 2D поля движения по множеству данных об изображениях; аппроксимацию оценки трехмерного (3D) поля движения, включающей в себя применение модели преобразования к оценке 2D поля движения; определение, по меньшей мере, одного изменения в режиме реального времени, по меньшей мере, части области на основании аппроксимированной оценки 3D поля движения; и управление терапией, по меньшей мере, части области c использованием определенного, по меньшей мере, одного изменения.
[0062] В Примере 2, предмет изобретения Примера 1 может опционально включать в себя использование модели преобразования, при этом модель преобразования определяется путем: получения, по меньшей мере, двух объемов данных о 3D изображениях в течение первого периода времени, по меньшей мере, двух объемов данных о 3D изображениях, включающих в себя, по меньшей мере, часть области; выполнения оценки 3D поля движения, по меньшей мере, по двум объемам данных о 3D изображениях, полученных в течение первого периода времени; получения данных о 2D изображениях, соответствующих, по меньшей мере, двум 2D изображениям в течение первого периода времени, данные о 2D изображениях включают в себя, по меньшей мере, часть области; выполнения оценки 2D поля движения по данным о 2D изображениях, полученным в течение первого периода времени; и определения модели преобразования с использованием уменьшенного 3D поля движения и 2D поля движения.
[0063] В Примере 3, предмет изобретения Примера 2 может опционально включать в себя, по меньшей мере, одно из: выполнения оценки 3D поля движения или выполнения оценки 2D поля движения, которое включает в себя вычисление векторного поля деформации.
[0064] В Примере 4, предмет изобретения одного или нескольких из Примеров 2 и 3 может опционально включать в себя уменьшение размерности, по меньшей мере, одного из: оцененного 3D поля движения и оцененного 2D поля движения.
[0065] В Примере 5, предмет изобретения Примера 4 может опционально включать в себя выполнение анализа главных компонентов для определения множества главных компонентов; и при этом уменьшение размерности, по меньшей мере, одного из: оцененного 3D поля движения и оцененного 2D поля движения включает в себя выбор, по меньшей мере, одного из главных компонентов на основании заранее заданного критерия.
[0066] В Примере 6, предмет изобретения одного или нескольких из Примеров 2-5 может опционально включать в себя определение модели преобразования с использованием уменьшенного 3D поля движения и 2D поля движения, которое включает в себя выполнение регрессии главных компонентов.
[0067] В Примере 7, предмет изобретения одного или нескольких из Примеров 1-6 может опционально включать в себя управление терапией, которое содержит: синхронизацию терапии, если, по меньшей мере, часть области находится вне пределов заранее заданного пространственного окна синхронизации.
[0068] В Примере 8, предмет изобретения одного или нескольких из Примеров 1-7 может опционально включать в себя управление терапией, которое содержит: управление направлением испускаемого излучения устройства оказания терапии для отслеживания области.
[0069] В Примере 9 предмет изобретения одного или нескольких из Примеров 1-8 может опционально включать в себя определение коррекции на перемещение пациента между первым сеансом пациента в первый раз и вторым сеансом пациента во второй раз.
[0070] В Примере 10 предмет изобретения одного или нескольких из Примеров 2-9 может опционально включить в себя получение, по меньшей мере, двух объемов данных о 3D изображениях в течение первого периода времени, которое включает в себя: получение данных об изображениях за множество дыхательных циклов, при этом отдельные дыхательные циклы включают в себя множество частей; и генерацию, по меньшей мер,е двух объемов данных о 3D изображениях с использованием центральной тенденции данных об изображениях в подобных частях.
[0071] В Примере 11 предмет изобретения одного или нескольких из Примеров 1-10 может опционально включать в себя, по меньшей мере, одно изменение в режиме реального времени, которое включает в себя, по меньшей мере, одну 3D деформацию в режиме реального времени.
[0072] В Примере 12 предмет изобретения одного или нескольких из Примеров 1-11 может опционально включать в себя, по меньшей мере, одно изменение в режиме реального времени, которое включает в себя, по меньшей мере, одно 3D местоположение в режиме реального времени.
[0073] В Примере 13 предмет изобретения одного или нескольких из Примеров 1-12 может опционально включать в себя, по меньшей мере, одно изменение в режиме реального времени, которое включает в себя, по меньшей мере, одно 3D вращение в режиме реального времени.
[0074] Пример 14 включает в себя предмет изобретения (такой как устройство, аппарат, систему или машину) для управления адаптивной радиационной терапией, управляемой с помощью изображения в режиме реального времени, по меньшей мере, части области пациента, который содержит: систему адаптации терапии, выполненную с возможностью: получения множества данных об изображениях в режиме реального времени, соответствующих двумерным (2D) изображениям магнитно-резонансной томографии (MRI), включающим, по меньшей мере, часть области; выполнения оценки 2D поля движения по множеству данных об изображениях; аппроксимации оценки трехмерного (3D) поля движения, включающей в себя применение модели преобразования к оценке 2D поля движения; определения, по меньшей мере, одного изменения в режиме реального времени, по меньшей мере, части области на основании аппроксимированной оценки 3D поля движения; и схему контроллера терапии, выполненную с возможностью: управления терапией, по меньшей мере, части области с использованием определенного, по меньшей мере, одного изменения.
[0075] В Примере 15, предмет изобретения Примера 14 может опционально включать в себя систему адаптации терапии, которая выполнена с возможностью: использования модели преобразования, при этом модель преобразования определяется путем: получения, по меньшей мере, двух объемов данных о 3D изображениях в течение первого периода времени, по меньшей мере, двух объемов данных о 3D изображениях, включающих в себя, по меньшей мере, часть области; выполнения оценки 3D поля движения, по меньшей мере, по двум объемам данных о 3D изображениях, полученных в течение первого периода времени; получения данных о 2D изображениях, соответствующих, по меньшей мере, двум 2D изображениям в течение первого периода времени, данные о 2D изображениях включают, по меньшей мере, часть области; выполнения оценки 2D поля движения по данным о 2D изображениях, полученных в течение первого периода времени; и определения модели преобразования с использованием уменьшенного 3D поля движения и 2D поля движения.
[0076] В Примере 16, предмет изобретения Примера 15 может опционально включать в себя, по меньшей мере, одно из: выполнения оценки 3D поля движения или выполнения оценки 2D поля движения, которое включает в себя вычисление векторного поля деформации.
[0077] В Примере 17, предмет изобретения одного или нескольких из Примеров 15 и 16 может опционально включать в себя систему адаптации терапии, которая выполнена с возможностью: уменьшения размерности, по меньшей мере, одного из: оцененного 3D поля движения и оцененного 2D поля движения.
[0078] В Примере 18, предмет изобретения Примера 17 может опционально включать в себя систему адаптации терапии, которая выполнена с возможностью: выполнения анализа главных компонентов для определения множества главных компонентов; и при этом система адаптации терапии выполнена с возможностью уменьшения размерности, по меньшей мере, одного из: оцененного 3D поля движения и оцененного 2D поля движения, которое включает в себя выбор, по меньшей мере, одного из главных компонентов на основании заранее заданного критерия.
[0079] В Примере 19, предмет изобретения одного или нескольких из Примеров 15-18 может опционально включать в себя систему адаптации терапии, которая выполнена с возможностью определения модели преобразования с использованием уменьшенного 3D поля движения и 2D поля движения, которое включает в себя выполнение регрессии главных компонентов.
[0080] В Примере 20, предмет изобретения одного или нескольких из Примеров 14-19 может опционально включать в себя схему контроллера терапии, выполненную с возможностью управления терапией, и выполненную с возможностью синхронизации терапии, если, по меньшей мере, часть области находится вне пределов заранее заданного пространственного окна синхронизации.
[0081] В Примере 21, предмет изобретения одного или нескольких из Примеров 14-20 может опционально включать в себя схему контроллера терапии, которая выполнена с возможностью управления терапией, и выполненную с возможностью управления направлением испускаемого излучения устройства оказания терапии для отслеживания области.
[0082] В Примере 22, предмет изобретения одного или нескольких из Примеров 14-21 может опционально включать в себя систему адаптации терапии, которая выполнена с возможностью определения коррекции на перемещение пациента между первым сеансом пациента в первый раз и вторым сеансом пациента во второй раз.
[0083] В Примере 23, предмет изобретения одного или нескольких из Примеров 15-22 может опционально включать в себя систему адаптации терапии, которая выполнена с возможностью получения, по меньшей мере, двух объемов данных о 3D изображениях в течение первого периода времени, и выполненную с возможностью получения данных об изображениях за множество дыхательных циклов, при этом отдельные дыхательные циклы включают в себя множество частей; и генерации, по меньшей мере, двух объемов данных о 3D изображениях с использованием центральной тенденции данных об изображениях в подобных частях.
[0084] В Примере 24, предмет изобретения одного или нескольких из Примеров 14-23 может опционально включать в себя, по меньшей мере, одно изменение в режиме реального времени, которое включает в себя, по меньшей мере, одну 3D деформацию в режиме реального времени.
[0085] В Примере 25, предмет изобретения одного или нескольких из Примеров 14-24 может опционально включать в себя, по меньшей мере, одно изменение в режиме реального времени, которое включает в себя, по меньшей мере, одно 3D местоположение в режиме реального времени.
[0086] В Примере 26, предмет изобретения одного или нескольких из Примеров 14-25 может опционально включать в себя, по меньшей мере, одно изменение в режиме реального времени, которое включает в себя, по меньшей мере, одно 3D вращение в режиме реального времени.
[0087] Вышеупомянутое подробное описание включает в себя ссылки на прилагаемые чертежи, которые являются частью подробного описания. Чертежи показывают, в качестве иллюстрации, конкретные варианты осуществления, в которых изобретение может быть реализовано на практике. Эти варианты осуществления также называются в настоящем описании «примерами». Такие примеры могут включать в себя элементы в дополнение к показанным или описанным. Однако автор настоящего изобретения также предусматривает примеры, в которых обеспечены только показанные или описанные элементы.
[0088] Кроме того, авторы настоящего изобретения также рассматривают примеры с использованием любой комбинации или перестановки показанных или описанных элементов (или одного или нескольких их аспектов), либо относительно конкретного примера (или одного или нескольких их аспектов), либо относительно других примеров (или одного или нескольких их аспектов), показанных или описанных в настоящем описании.
[0089] Все публикации, патенты и патентные документы, упомянутые в этом документе, полностью включены в настоящее описание путем ссылки, как если бы они были по отдельности включены путем ссылки. В случае несовместимых практик между этим документом и документами, включенными путем ссылки, практики во включенной ссылке(ах) должны рассматриваться как дополнительные к таковым в этом документе; для непримиримых противоречий используются практики в этом документе.
[0090] В этом документе единственное число, как обычно в патентных документах, подразумевает один или более одного, независимо от любых других случаев или использований фраз «по меньшей мере один» или «один или несколько». В этом документе термин «или» используется для обозначения неисключающего или, такого, что «A или B» включает в себя «A, но не B», «B, но не A» и «A и B», если не указано иное. В этом документе термины «включающий в себя» и «в котором» используются в качестве простых эквивалентов соответствующих терминов «содержащий» и «при этом». Кроме того, в прилагаемой формуле изобретения термины «включающий в себя» и «содержащий» являются открытыми, то есть аппарат, система, устройство, изделие, композиция, состав или процесс, который включает в себя элементы в дополнение к перечисленным после такого термина в пункте формулы изобретения, все также попадает в объем этого пункта формулы изобретения. Кроме того, в прилагаемой формуле изобретения термины «первый», «второй», «третий» и т.д. используются просто в качестве обозначений и не накладывают численные требования к их объектам.
[0091] Примеры способа, описанные в настоящем описании, могут быть, по меньшей мере, частично реализованы с помощью компьютера или машины. Некоторые примеры могут включать в себя машиночитаемый носитель или машиночитаемую среду, в которой закодированы инструкции, выполненные с возможностью конфигурации электронного устройства для выполнения способов, как было описано в упомянутых выше примерах. Реализация таких способов может включать в себя код, такой как микрокод, код на языке ассемблера, код на языке верхнего уровня и т.п. Такой код может включать в себя машиночитаемые инструкции для выполнения различных способов. Код может формировать части компьютерных программных продуктов. Кроме того, в одном примере код может реально храниться на одном или нескольких энергозависимых, долговременных или энергонезависимых материальных машиночитаемых носителях, например, во время исполнения или в другое время. Примеры этих материальных машиночитаемых носителей могут включать в себя, но не ограничиваются только этим, жесткие диски, съемные магнитные диски, съемные оптические диски (например, компакт-диски и цифровые видеодиски), магнитные кассеты, карты памяти, оперативные запоминающие устройства (RAM), постоянные запоминающие устройства (ROM) и т.п.
[0092] Приведенное выше описание является иллюстративным, а не ограничивающим. Например, описанные выше примеры (или один или несколько их аспектов) могут использоваться в комбинации друг с другом. Могут использоваться другие варианты осуществления, например, специалистом в области техники после изучения приведенного выше описания. Реферат обеспечен в соответствии с 1.72 (b) раздела 37 Свода федеральных правил США (37 C.F.R. 1.72 (b)) для того, чтобы позволить читателю быстро определить природу технического раскрытия. Он представлен с пониманием того, что он не будет использоваться для интерпретации или ограничения объема, или смысла формулы изобретения. Кроме того, в приведенном выше подробном описании различные признаки могут группироваться вместе для оптимизации раскрытия. Это не должно рассматриваться как предположение, что не включенный в формулу изобретения раскрытый признак является существенным для какого-либо пункта формулы изобретения. Скорее объект изобретения может заключаться менее, чем во всех признаках конкретного раскрытого варианта осуществления. Таким образом, прилагаемая формула изобретения настоящим включена в подробное описание в качестве примеров или вариантов осуществления, где каждый пункт формулы изобретения сам по себе является отдельным вариантом осуществления, и предполагается, что такие варианты осуществления могут быть объединены друг с другом в различных комбинациях или перестановках. Объем изобретения должен определяться прилагаемой формулой изобретения, наряду с полным объемом эквивалентов, на которые эта формула изобретения дает право.



Группа изобретений относится к медицинской технике, а именно к медицинским системам визуализации и радиотерапии. Реализованный с помощью компьютера способ управления адаптивной радиационной терапией, управляемой с помощью изображения в режиме реального времени по меньшей мере части области пациента, содержит этапы, на которых получают множество данных об изображениях в режиме реального времени, соответствующих двумерным (2D) изображениям магнитно-резонансной томографии (MRI), включающих в себя по меньшей мере часть области, выполняют оценку 2D поля движения по множеству данных об изображениях, выполняют аппроксимацию оценки трехмерного (3D) поля движения, включающей в себя применение модели преобразования к оценке 2D поля движения, при этом модель преобразования определяется путем: выполнения оценки 3D поля движения по меньшей мере по двум объемам данных о 3D изображениях, включающих в себя по меньшей мере часть области и полученных в течение первого периода времени; выполнения оценки 2D поля движения по данным о 2D изображениях, соответствующих по меньшей мере двум 2D изображениям, включающих в себя по меньшей мере часть области и полученных в течение первого периода времени, и определения модели преобразования с использованием уменьшения размерности по меньшей мере одного из: оцененного 3D поля движения и оцененного 2D поля движения; определяют по меньшей мере одно изменение в режиме реального времени по меньшей мере части области на основании аппроксимированной оценки 3D поля движения; и управляют терапией по меньшей мере части области с использованием определенного по меньшей мере одного изменения. Система для управления адаптивной радиационной терапией содержит систему адаптации терапии и схему контроллера терапии, выполненную с возможностью управления терапией по меньшей мере части области с использованием определенного по меньшей мере одного изменения. Использование изобретений позволяет повысить точность 3D локализации и быстроту отслеживания цели для учета движения пациента. 2 н. и 19 з.п. ф-лы, 4 ил.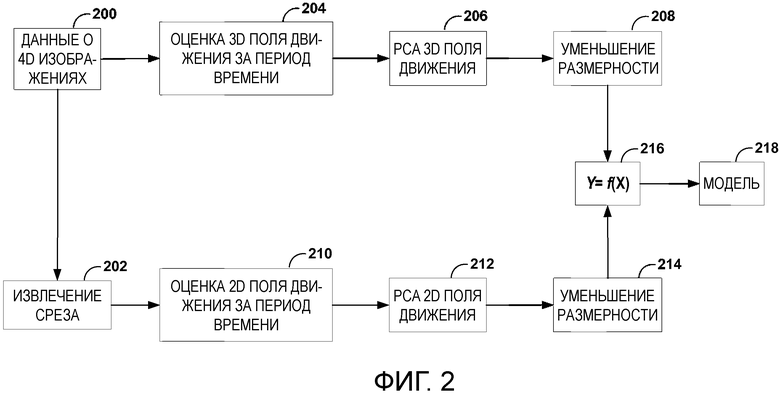
1. Реализованный с помощью компьютера способ управления адаптивной радиационной терапией, управляемой с помощью изображения в режиме реального времени по меньшей мере части области пациента, содержащий этапы, на которых:
получают множество данных об изображениях в режиме реального времени, соответствующих двумерным (2D) изображениям магнитно-резонансной томографии (MRI), включающих в себя по меньшей мере часть области;
выполняют оценку 2D поля движения по множеству данных об изображениях;
выполняют аппроксимацию оценки трехмерного (3D) поля движения, включающей в себя применение модели преобразования к оценке 2D поля движения;
при этом модель преобразования определяется путем:
выполнения оценки 3D поля движения по меньшей мере по двум объемам данных о 3D изображениях, включающих в себя по меньшей мере часть области и полученных в течение первого периода времени;
выполнения оценки 2D поля движения по данным о 2D изображениях, соответствующих по меньшей мере двум 2D изображениям, включающих в себя по меньшей мере часть области и полученных в течение первого периода времени, и
определения модели преобразования с использованием уменьшения размерности по меньшей мере одного из: оцененного 3D поля движения и оцененного 2D поля движения;
определяют по меньшей мере одно изменение в режиме реального времени по меньшей мере части области на основании аппроксимированной оценки 3D поля движения; и
управляют терапией по меньшей мере части области с использованием определенного по меньшей мере одного изменения.
2. Реализованный с помощью компьютера способ по п. 1, в котором по меньшей мере одно из: выполнения оценки 3D поля движения и выполнения оценки 2D поля движения включает в себя вычисление векторного поля деформации.
3. Реализованный с помощью компьютера способ по п. 1, содержащий этап, на котором:
выполняют анализ главных компонентов для определения множества главных компонентов; и
при этом уменьшение размерности одного из: оцененного 3D поля движения и оцененного 2D поля движения включает в себя выбор по меньшей мере одного из главных компонентов на основании заранее заданного критерия.
4. Реализованный с помощью компьютера способ по п. 1, в котором этап, на котором определяют модель преобразования с использованием уменьшения размерности по меньшей мере одного из: оцененного 3D поля движения и оцененного 2D поля движения, включает в себя выполнение регрессии главных компонентов.
5. Реализованный с помощью компьютера способ по п. 1, в котором этап, на котором управляют терапией, содержит этап, на котором:
синхронизируют терапию, если по меньшей мере часть области находится вне пределов заранее заданного пространственного окна синхронизации.
6. Реализованный с помощью компьютера способ по п. 1, в котором этап, на котором управляют терапией, содержит этап, на котором:
управляют направлением испускаемого излучения устройства оказания терапии для отслеживания области.
7. Реализованный с помощью компьютера способ по п. 1, содержащий этап, на котором:
определяют коррекцию на перемещение пациента между первым сеансом пациента в первый раз и вторым сеансом пациента во второй раз.
8. Реализованный с помощью компьютера способ по п. 1, в котором этап, на котором получают по меньшей мере два объема данных о 3D изображениях в течение первого периода времени, включает в себя этапы, на которых:
получают данные об изображениях за множество дыхательных циклов, при этом отдельные дыхательные циклы включают в себя множество частей; и
генерируют по меньшей мере два объема данных о 3D изображениях с использованием центральной тенденции данных об изображениях в подобных частях.
9. Реализованный с помощью компьютера способ по п. 1, в котором по меньшей мере одно изменение в режиме реального времени включает в себя по меньшей мере одну 3D деформацию в режиме реального времени.
10. Реализованный с помощью компьютера способ по п. 1, в котором по меньшей мере одно изменение в режиме реального времени включает в себя по меньшей мере одно 3D местоположение в режиме реального времени.
11. Реализованный с помощью компьютера способ по п. 1, в котором по меньшей мере одно изменение в режиме реального времени включает в себя по меньшей мере одно 3D вращение в режиме реального времени.
12. Система для управления адаптивной радиационной терапией, управляемой с помощью изображения в режиме реального времени по меньшей мере части области пациента, содержащая:
систему адаптации терапии, выполненную с возможностью:
получения множества данных об изображениях в режиме реального времени, соответствующих двумерным (2D) изображениям магнитно-резонансной томографии (MRI), включающим в себя по меньшей мере часть области;
выполнения оценки 2D поля движения по множеству данных об изображениях;
аппроксимации оценки трехмерного (3D) поля движения, включающей в себя применение модели преобразования к оценке 2D поля движения;
при этом модель преобразования определяется путем:
выполнения оценки 3D поля движения по меньшей мере по двум объемам данных о 3D изображениях, включающих в себя по меньшей мере часть области и полученных в течение первого периода времени;
выполнения оценки 2D поля движения по данным о 2D изображениях, включающих в себя по меньшей мере часть области и полученных в течение первого периода времени; и
определения модели преобразования с использованием уменьшения размерности по меньшей мере одного из: оцененного 3D поля движения и оцененного 2D поля движения;
определения по меньшей мере одного изменения в режиме реального времени по меньшей мере части области на основании аппроксимированной оценки 3D поля движения; и
схему контроллера терапии, выполненную с возможностью:
управления терапией по меньшей мере части области с использованием определенного по меньшей мере одного изменения.
13. Система по п. 12, в которой по меньшей мере одно из: выполнения оценки 3D поля движения и выполнения оценки 2D поля движения включает в себя вычисление векторного поля деформации.
14. Система по п. 12, в которой система адаптации терапии выполнена с возможностью:
выполнения анализа главных компонентов для определения множества главных компонентов; и
при этом система адаптации терапии выполнена с возможностью уменьшения размерности по меньшей мере одного из: оцененного 3D поля движения и оцененного 2D поля движения, которое включает в себя выбор по меньшей мере одного из главных компонентов на основании заранее заданного критерия.
15. Система по п. 12, в которой система адаптации терапии выполнена с возможностью определения модели преобразования с использованием уменьшения размерности по меньшей мере одного из: оцененного 3D поля движения и оцененного 2D поля движения, выполненного с возможностью выполнять регрессию главного компонента.
16. Система по п. 12, в которой схема контроллера терапии, выполненная с возможностью управления терапией, выполнена с возможностью:
синхронизации терапии, если по меньшей мере часть области находится вне пределов заранее заданного пространственного окна синхронизации.
17. Система по п. 13, в которой схема контроллера терапии, выполненная с возможностью управления терапией, выполнена с возможностью:
управления направлением испускаемого излучения устройства оказания терапии для отслеживания области.
18. Система по п. 12, в которой система адаптации терапии выполнена с возможностью:
определения коррекции на перемещение пациента между первым сеансом пациента в первый раз и вторым сеансом пациента во второй раз.
19. Система по п. 12, в которой система адаптации терапии, выполненная с возможностью получения по меньшей мере двух объемов данных о 3D изображениях в течение первого периода времени, выполнена с возможностью:
получения данных об изображениях за множество дыхательных циклов, при этом отдельные дыхательные циклы включают в себя множество частей; и
генерации по меньшей мере двух объемов данных о 3D изображениях с использованием центральной тенденции данных об изображениях в подобных частях.
20. Система по п. 12, в которой по меньшей мере одно изменение в режиме реального времени включает в себя по меньшей мере одну 3D деформацию в режиме реального времени.
21. Система по п. 12, в которой по меньшей мере одно изменение в режиме реального времени включает в себя по меньшей мере одно 3D местоположение в режиме реального времени или по меньшей мере одно 3D вращение в режиме реального времени.
| US 2003048267 A1, 13.03.2003 | |||
| US 2006074292 A1, 06.04.2006 | |||
| US 2012245453 A1, 27.09.2012 | |||
| RU 2007132466 A, 10.03.2009. |

