Предлагаемые способ и система относятся к автоматике и вычислительной технике и могут быть использованы при построении систем автоматизированного управления складами, а именно для облегчения поиска грузов, в системах поиска шахтеров в шахтах после аварии, отслеживания перемещений персонала по территории охраняемых и важных объектов.
Известны способы определения координат подвижного объекта (патенты РФ №№2.013.785, 2.248.235, 2.284.542, 2.286.486, 2.351.945; патенты США №№4.916.455, 6.044.256, 7.151.447; патент Великобритании №2.256.730; патент Франции №2.630.565; патент WO №98/53.431; Бурлаков В. Радиочастотная идентификация. Электронные компоненты, 2005, №5, с.55-60 и другие).
Из известных способов и систем наиболее близкими к предлагаемым являются «Способ определения координат подвижного объекта в закрытых помещениях и система для его реализации» (патент РФ №2.351.945, G01S 5/00, 2007), которые и выбраны в качестве базовых объектов.
Известные способ и система обеспечивают повышение достоверности и надежности мониторинга подвижных объектов в закрытых помещениях путем использования сложных сигналов с фазовой манипуляцией и надежных радиочастотных идентификаторов на поверхностных акустических волнах (ПАВ).
Для развязки радиочастотных идентификаторов и радиомодемов выбраны разные частоты w1 и w2=2w1.
Однако частоты w1 и w2=2w1 являются кратными, и между радиочастотными идентификаторами и радиомодемами возможна связь на гармониках указанных частот, что не обеспечивает полной развязки между ними.
Кроме того, процедура получения опорного напряжения, необходимого для синхронного детектирования принимаемого ФМн-сигнала в приемном радиомодеме, включает вращение фазы гармонического колебания на 90°, что практически трудно реализуемо.
Технической задачей изобретения является повышение достоверности и надежности определения координат подвижных объектов в закрытых помещениях путем полной развязки по частоте между радиочастотными идентификаторами и радиомодемами и упрощения процедуры выделения опорного напряжения непосредственно из принимаемого сигнала с фазовой манипуляцией.
Поставленная задача решается тем, что способ определения координат подвижного объекта в закрытых помещениях с использованием электронных идентификаторов и считывателей, согласно которому, в соответствии с ближайшим аналогом, считыватель закрепляют на подвижном объекте, а электронные идентификаторы закрепляют на элементах конструкции помещения, при приближении к электронному идентификатору подвижного объекта его считывателем считывают код электронного идентификатора и вместе с кодом подвижного объекта передают через радиомодем на радиомодем электронно-вычислительной машины (ЭВМ), при этом положение электронных идентификаторов определяется сеткой с постоянным шагом, нанесенной на план помещения, коды электронных идентификаторов и коды координат их положения запоминают в ЭВМ, в которой определяют координаты подвижного объекта и отображают его положение на мониторе совместно с планом помещения, в качестве электронного идентификатора используют пьезокристалл с нанесенным на его поверхность алюминиевым встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, при приближении к электронному идентификатору подвижного объекта его считывателем облучают электронный идентификатор гармоническим колебанием несущей частоты w1, принимают его на электронном идентификаторе, преобразуют в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну опять в сложный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревого преобразователя, переизлучают его в эфир, принимают считывателем подвижного объекта, усиливают по амплитуде, осуществляют синхронное детектирование на частоте w1, выделяют низкочастотное напряжение, соответствующее коду электронного идентификатора, суммируют с кодом подвижного объекта, выделяют гармоническое колебание несущей частоты w2, манипулируют его по фазе суммарным кодом, усиливают по мощности, сформированный сложный сигнал с фазовой манипуляцией излучают в эфир и принимают радиомодемом ЭВМ, отличается от ближайшего аналога тем, что гармоническое колебание несущей частоты w1 преобразуют по частоте с использованием гармонического колебания частоты  , выделяют гармоническое колебание разностной частоты
, выделяют гармоническое колебание разностной частоты  , умножают его частоту на n, выделяют гармоническое колебание частоты
, умножают его частоту на n, выделяют гармоническое колебание частоты  , умножают его частоту на
, умножают его частоту на  и выделяют гармоническое колебание частоты
и выделяют гармоническое колебание частоты  , причем отношение
, причем отношение  выбирают дробно-рациональным, где n, m - простые числа, между которыми выполняется неравенство n≠m-1, принимаемый радиомодемом ЭВМ сложный сигнал с фазовой манипуляцией на частоте w2 умножают по фазе на два, выделяют гармоническое колебание на частоте 2w2, делят его по фазе на два, выделяют гармоническое колебание несущей частоты w2 и используют его для синхронного детектирования сложного сигнала с фазовой манипуляцией.
выбирают дробно-рациональным, где n, m - простые числа, между которыми выполняется неравенство n≠m-1, принимаемый радиомодемом ЭВМ сложный сигнал с фазовой манипуляцией на частоте w2 умножают по фазе на два, выделяют гармоническое колебание на частоте 2w2, делят его по фазе на два, выделяют гармоническое колебание несущей частоты w2 и используют его для синхронного детектирования сложного сигнала с фазовой манипуляцией.
Поставленная задача решается тем, что система для определения координат положения подвижного объекта в закрытых помещениях, содержащая, в соответствии с ближайшим аналогом, электронные идентификаторы, размещенные на элементах конструкции помещения, считыватель, закрепленный на подвижном объекте, передающий радиомодем, связанный со считывателем, и приемный радиомодем, подключенный к ЭВМ, при этом положение электронных идентификаторов определяется сеткой с постоянным шагом, нанесенной на план помещения, коды электронных идентификаторов и коды координат их положения запоминаются в ЭВМ, в которой определяются координаты подвижного объекта, и отображается его положение на мониторе совместно с планом помещения, считыватель выполнен в виде последовательно включенных задающего генератора, циркулятора, вход-выход которого связан с приемопередающей антенной, усилителя высокой частоты и фазового детектора, второй вход которого соединен с выходом задающего генератора, передающий радиомодем выполнен в виде последовательно подключенных к выходу фазового детектора линии задержки, сумматора, второй вход которого соединен с выходом генератора псевдослучайной последовательности, фазового манипулятора, второй вход которого соединен с выходом первого узкополосного фильтра, и усилителя мощности, выход которого соединен с вторым входом циркулятора, приемный радиомодем выполнен в виде удвоителя фазы, делителя фазы на два, первого и второго узкополосных фильтров, последовательно включенных приемной антенны, усилителя высокой частоты и фазового детектора, выход которого подключен к ЭВМ, электронный идентификатор выполнен в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, встречно-штыревой преобразователь содержит две гребенчатые системы электродов, электроды каждой из гребенок соединены друг с другом шинами, связанными с микрополосковой антенной, отличается от ближайшего аналога тем, что передающий модем снабжен регенеративным делителем, состоящим из последовательно подключенных к выходу задающего генератора смесителя, второго узкополосного фильтра, умножителя частоты на n, первого узкополосного фильтра, умножителя частоты на  и третьего узкополосного фильтра, выход которого соединен с вторым входом смесителя, в приемном радиомодеме к выходу усилителя высокой частоты последовательно подключены удвоитель фазы, первый узкополосный фильтр, делитель фазы на два и второй узкополосный фильтр, выход которого соединен с вторым входом фазового детектора.
и третьего узкополосного фильтра, выход которого соединен с вторым входом смесителя, в приемном радиомодеме к выходу усилителя высокой частоты последовательно подключены удвоитель фазы, первый узкополосный фильтр, делитель фазы на два и второй узкополосный фильтр, выход которого соединен с вторым входом фазового детектора.
Структурная схема системы, реализующей предлагаемый способ, представлена на фиг.1. Функциональная схема радиочастотного идентификатора изображена на фиг.2. Структурная схема считывателя и передающего радиомодема представлена на фиг.3. Структурная схема приемного радиомодема представлена на фиг.4. Временные диаграммы, поясняющие работу системы, показаны на фиг.5.
Радиочастотный идентификатор выполнен в виде пьезокристалла 18 с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной 19, и набором отражателей 22. Встречно-штыревой преобразователь (ВШП) поверхностных акустических волн (ПАВ) содержит две гребенчатые системы электродов 20, шины 21.1 и 21.2, которые соединяют электроды каждой из гребенок между собой. Шины 21.1 и 21.2 в свою очередь связаны с микрополосковой антенной 19.
Считыватель 2 выполнен в виде последовательно включенных задающего генератора 6, циркулятора 7, вход-выход которого связан с приемопередающей антенной 8, усилителя 9 высокой частоты и фазового детектора 10, второй вход которого соединен с выходом задающего генератора 6.
Передающий радиомодем 3 выполнен в виде последовательно подключенных к выходу фазового детектора 10 линии задержки 11, сумматора 13, второй вход которого соединен с выходом генератора 12 псевдослучайной последовательности (ПСП), фазового манипулятора 16 и усилителя 17 мощности, выход которого соединен с вторым входом циркулятора 7, последовательно подключенных к выходу задающего генератора 6 смесителя 30, второго узкополосного фильтра 31, умножителя 32 частоты на n, первого узкополосного фильтра 15, умножителя частоты 33 на  и третьего узкополосного фильтра 34, выход которого соединен с вторым входом смесителя 30.
и третьего узкополосного фильтра 34, выход которого соединен с вторым входом смесителя 30.
Приемный радиомодем 5 выполнен в виде последовательно подключенных к выходу приемной антенны 23 усилителя 24 высокой частоты, удвоителя 25 фазы, первого узкополосного фильтра 26, делителя 27 фазы на два, второго узкополосного фильтра 28 и фазового детектора 29, второй вход которого соединен с выходом усилителя 24 высокой частоты, а выход подключен к ЭВМ 4.
Способ определения координат подвижного объекта в закрытых помещениях реализуется следующим образом.
Составляется (или берется готовый) план здания, склада, шахты. Замеряются расстояния по этому плану между радиочастотными идентификаторами 1.i (i=1, 2, …, n), которые должны служить отметками координат. Например, для склада (ангара), в котором не имеется внутренних перегородок, на план можно нанести сетку с постоянным шагом между ячейками. В системе координат этого плана определяют координаты этих ячеек. В радиочастотные идентификаторы записывают координаты ячеек, идентификаторы соответственно маркируются путем выбора внутренней структуры встречно-штыревого преобразователя. На полу делается соответствующая разметка и высверливаются отверстия, в которые закладываются соответствующие идентификаторы, отверстия бетонируются. Можно под потолком натянуть проволоку, на которую можно закрепить идентификаторы 1.i (i=1, 2, …, n). В шахте можно идентификаторы закрепить с соответствующим шагом на потолке штрека.
На фиг.1 представлена система, реализующая предлагаемый способ, в которой радиочастотные идентификаторы 1.i (i=1, 2, …, n) содержат коды их координат и закреплены на строительных конструкциях. В память считывателя 2 записывают код подвижного объекта (оператора склада, шахтера, важного груза, погрузчика) и закрепляют его соответственно на поясе человека, на погрузчике, на грузе.
Задающим генератором 6 считывателя 2 формируется высокочастотное колебание (фиг.5, а):
 , 0≤t≤T1,
, 0≤t≤T1,
где U1, w1, φ1, T1 - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания, которое через циркулятор 7 поступает в антенну 8, излучается ею в эфир и облучает ближайший радиочастотный идентификатор 1.i (i=1, 2, …, n). Высокочастотное гармоническое колебание на частоте w1 улавливается микрополосковой антенной 19, настроенной на частоту w1, преобразуется встречно-штыревым преобразователем в акустическую волну, которая распространяется по поверхности пьезокристалла 18, отражается от отражателей 22 и опять преобразуется в сложный сигнал с фазовой манипуляцией (ФМн) (фиг.5, в):
 , 0≤t≤T1,
, 0≤t≤T1,
где φк1(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t) (фиг.5, б), отображающим координаты идентификатора, причем φк1(t)=const при Кτэ<t<(к+1)τэ и может изменяться скачком при t=Кτэ, т.е. на границах между элементарными посылками (К=1, 2, …, N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью T1(T1=N·τэ).
При этом внутренняя структура сформированного сложного ФМн-сигнала определяется топологией встречно-штыревого преобразователя, имеет индивидуальный характер и содержит информацию о местоположении идентификатора в соответствующем сооружении.
Сформированный сложный ФМн-сигнал u2(t) излучается микрополосковой антенной 19 в эфир, улавливается приемопередающей антенной 8 и через циркулятор 7 и усилитель 9 высокой частоты поступает на первый (информационный) вход фазового детектора 10. На второй (опорный) вход последнего в качестве опорного напряжения подается высокочастотное колебание u1(t) (фиг.5, а) с выхода задающего генератора 6. В результате синхронного детектирования на выходе фазового детектора 10 образуется низкочастотное напряжение (фиг.5, г):
 , 0≤t≤T1,
, 0≤t≤T1,
где  ,
,
пропорциональное модулирующему коду M1(t) (фиг.5, б).
Это напряжение поступает на вход линии 11 задержки, где задерживается на время τз, равное длительности τ1 модулирующего кода M1(t), и поступает на первый вход сумматора 13. На второй вход последнего подается код подвижного объекта (оператора склада, погрузчика, шахтера) с выхода генератора 12 псевдослучайной последовательности (ПСП) длительностью τ2. На выходе сумматора 13 образуется суммарный модулирующий код М2(t) (фиг.5, е), состоящий из кода координат идентификатора и кода подвижного объекта, длительностью τ=τ1+τ2. Модулирующий код M2(t) поступает на первый вход фазового манипулятора 16.
Высокочастотное колебание u1(t) (фиг.5, а) с выхода задающего генератора 6 одновременно поступает на первый вход смесителя 30, на второй вход которого подается гармоническое колебание
 ,
,
где  ,
,
На выходе смесителя 30 образуется напряжение разностной частоты
 ,
,
где  ,
,
которое выделяется узкополосным фильтром 31 и поступает на вход умножителя 32 частоты на n. На выходе последнего образуется гармоническое колебание (фиг.5, д)

где  ,
,
которое выделяется узкополосным фильтром 15 и поступает на вход умножителя 33 частоты на  , на выходе которого образуется гармоническое колебание
, на выходе которого образуется гармоническое колебание
 ,
,
где 
которое выделяется узкополосным фильтром 34 и подается на второй вход смесителя 30.
Следовательно, на выходе регенеративного делителя 14, состоящего из двух умножителей частоты 31 и 33 в n и  раз, трех узкополосных фильтров 31, 15, 34 и смесителя 30, образуется гармоническое колебание u5(t), отношение частоты w2 которого к частоте w1 выбирается дробно-рациональным
раз, трех узкополосных фильтров 31, 15, 34 и смесителя 30, образуется гармоническое колебание u5(t), отношение частоты w2 которого к частоте w1 выбирается дробно-рациональным  . Это отношение позволяет исключить связь на гармониках между радиочастотными идентификаторами и радиомодемами.
. Это отношение позволяет исключить связь на гармониках между радиочастотными идентификаторами и радиомодемами.
Напряжение u5(t) (фиг.5, д) одновременно подается на второй вход фазового манипулятора 16, на выходе которого формируется сложный сигнал с фазовой манипуляцией (ФМн) (фиг.5, ж)
 , 0≤t≤T1,
, 0≤t≤T1,
который после усиления в усилителе 17 мощности через циркулятор 7 поступает в приемопередающую антенну 8, излучается ею в эфир, улавливается приемной антенной 23 и через усилитель 24 высокой частоты поступает на первый (информационный) вход фазового детектора 29 и на вход удвоителя 25 фазы. На выходе последнего образуется гармоническое колебание (фиг.5, з)
 , 0≤t≤Т1,
, 0≤t≤Т1,
где  ,
,
Так как 2φк(t)={0; π}, то в указанном колебании манипуляция фазы уже отсутствует.
Гармоническое колебание u7(t) выделяется узкополосным фильтром 26 и поступает на вход делителя 27 фазы на два, на выходе которого образуется гармоническое колебание (фиг.5, и)
 , 0≤t≤Т1,
, 0≤t≤Т1,
которое выделяется узкополосным фильтром 28, используется в качестве опорного напряжения и подается на второй (опорный) вход фазового детектора 29. В результате синхронного детектирования на выходе фазового детектора 29 образуется низкочастотное напряжение (фиг.5, к):
 , 0≤t≤Т1,
, 0≤t≤Т1,
где  ,
,
пропорциональное суммарному модулирующему коду M2(t) (фиг.5, е), которое поступает в ЭВМ 4.
Информация, содержащаяся в модулирующем коде M2(t), обрабатывается, запоминается и отображается на мониторе ЭВМ 4 совместно с планом здания (сооружения). Таким образом отслеживается положение подвижного объекта в закрытом помещении непрерывно во времени.
Такая информация может иметь особую важность для контроля и учета работы персонала складов и арсеналов с секретным и особо опасным оборудованием, так как положение такого оборудования в помещении будет контролироваться постоянно.
Таким образом, предлагаемые способ и система по сравнению с базовыми объектами и другими техническими решениями аналогичного назначения обеспечивают повышение достоверности и надежности определения координат подвижных объектов в закрытых помещениях. Это достигается полной развязкой по частоте между радиочастотными идентификаторами и радиомодемами и упрощением процедуры выделения опорного напряжения непосредственно из принимаемого сигнала с фазовой манипуляцией.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ПОДЗЕМНЫХ СООРУЖЕНИЙ МЕТРОПОЛИТЕНА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2425396C1 |
| Способ мониторинга состояния подземных сооружений и система для его реализации | 2019 |
|
RU2717079C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА В ЗАКРЫТЫХ ПОМЕЩЕНИЯХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2351945C1 |
| Способ мониторинга состояния подземных сооружений метрополитена и система для его реализации | 2020 |
|
RU2740514C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ПОДЗЕМНЫХ СООРУЖЕНИЙ МЕТРОПОЛИТЕНА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2711632C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ХРАНЕНИЯ ПРЕДМЕТА С ИСПОЛЬЗОВАНИЕМ РАДИОЧАСТОТНЫХ МЕТОК | 2011 |
|
RU2444025C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ СУБЪЕКТА НА ОБСЛУЖИВАЕМОМ ОБЪЕКТЕ | 2010 |
|
RU2434108C1 |
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2014 |
|
RU2559869C1 |
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2012 |
|
RU2499714C2 |
| Способ радиочастотной идентификации крупного и мелкого рогатого скота и устройство для его реализации | 2019 |
|
RU2725728C1 |
Предлагаемые способ и система относятся к автоматике и вычислительной технике и могут быть использованы при построении систем автоматизированного управления складами, а именно для облегчения поиска грузов, в системах поиска шахтеров в шахтах после аварии, отслеживания перемещений персонала по территории охраняемых и важных объектов. Технический результат - повышение достоверности и надежности определения координат подвижных объектов в закрытых помещениях путем полной развязки по частоте между радиочастотными идентификаторами и радиомодемами. Система для определения координат подвижного объекта в закрытых помещениях содержит радиочастотные идентификаторы 1.i (i=1, 2, …, n), считыватель 2, передающий радиомодем 3, приемный радиомодем 5, ЭВМ 4, при этом считыватель 2 содержит задающий генератор 6, циркулятор 7, усилитель 9 высокой частоты и фазовый детектор 10, передающий радиомодем содержит линию задержки 11, генератор 12 псевдослучайной последовательности (ПСП), сумматор 13, регенеративный делитель 14, фазовый манипулятор 16, усилитель 17 мощности, приемный радиомодем 5 содержит усилитель 24 высокой частоты, удвоитель 25 фазы, первый 26 и второй 28 узкополосные фильтры, делитель 27 фазы на два и фазовый детектор 29. 2 н.п. ф-лы, 5 ил.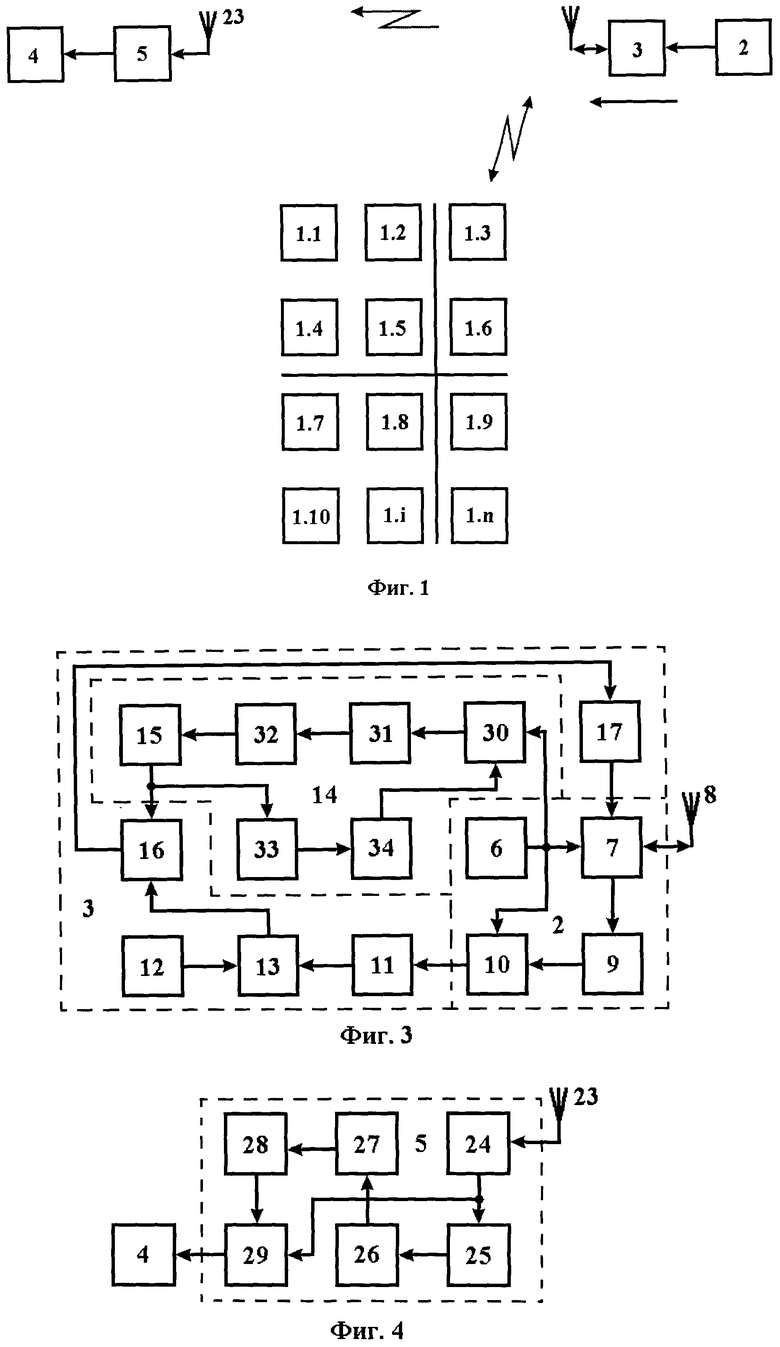
1. Способ определения координат положения подвижного объекта в закрытых помещениях с использованием электронных идентификаторов и считывателей, согласно которому считыватель закрепляют на подвижном объекте, а электронные идентификаторы закрепляют на элементах конструкции помещения, при приближении к электронному идентификатору подвижного объекта его считывателем считывают код электронного идентификатора и вместе с кодом подвижного объекта передают через радиомодем на радиомодем электронно-вычислительной машины (ЭВМ), при этом положение электронных идентификаторов определяется сеткой с постоянным шагом, нанесенной на план помещения, коды электронных идентификаторов и коды координат их положения запоминают в ЭВМ, в которой определяют координаты подвижного объекта и отображают его положение на мониторе совместно с планом помещения, в качестве электронного идентификатора используют пьезокристалл с нанесенным на его поверхность алюминиевым встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, при приближении к электронному идентификатору подвижного объекта его считывателем облучают электронный идентификатор гармоническим колебанием несущей частоты w1, принимают его на электронном идентификаторе, преобразуют в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну опять в сложный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревого преобразователя, переизлучают его в эфир, принимают считывателем подвижного объекта, усиливают по амплитуде, осуществляют синхронное детектирование на частоте w1, выделяют низкочастотное напряжение, соответствующее коду электронного идентификатора, задерживают его на время, равное длительности кода электронного идентификатора, суммируют с кодом подвижного объекта, выделяют гармоническое колебание несущей частоты w2, манипулируют его по фазе суммарным кодом, усиливают по мощности, сформированный сложный сигнал с фазовой манипуляцией излучают в эфир и принимают радиомодемом ЭВМ, отличающийся тем, что гармоническое колебание несущей частоты w1 преобразуют по частоте с использованием гармонического колебания частоты 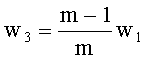 , выделяют гармоническое колебание разностной частоты
, выделяют гармоническое колебание разностной частоты 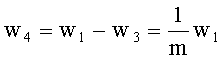 , умножают его частоту на n, выделяют гармоническое колебание частоты , умножают его частоту на и выделяют гармоническое колебание частоты , причем отношение выбирают дробно-рациональным, где n, m - простые числа, между которыми выполняется неравенство n≠m-1, принимаемый радиомодемом ЭВМ сложный сигнал с фазовой манипуляцией на частоте w2 умножают по фазе на два, выделяют гармоническое колебание на частоте 2w2, делят его по фазе на два, выделяют гармоническое колебание несущей частоты w2 и используют его для синхронного детектирования сложного сигнала с фазовой манипуляцией.
, умножают его частоту на n, выделяют гармоническое колебание частоты , умножают его частоту на и выделяют гармоническое колебание частоты , причем отношение выбирают дробно-рациональным, где n, m - простые числа, между которыми выполняется неравенство n≠m-1, принимаемый радиомодемом ЭВМ сложный сигнал с фазовой манипуляцией на частоте w2 умножают по фазе на два, выделяют гармоническое колебание на частоте 2w2, делят его по фазе на два, выделяют гармоническое колебание несущей частоты w2 и используют его для синхронного детектирования сложного сигнала с фазовой манипуляцией.
2. Система для определения координат положения подвижного объекта в закрытых помещениях, содержащая электронные идентификаторы, размещенные на элементах конструкции помещения, считыватель, закрепленный на подвижном объекте, передающий радиомодем, связанный со считывателем, и приемный радиомодем, подключенный к электронно-вычислительной машине (ЭВМ), при этом положение электронных идентификаторов определяется сеткой с постоянным шагом, нанесенной на план помещения, коды электронных идентификаторов и коды координат их положения запоминаются в ЭВМ, в которой определяются координаты подвижного объекта, и отображается его положение на мониторе совместно с планом помещения, считыватель выполнен в виде последовательно включенных задающего генератора, циркулятора, вход-выход которого связан с приемопередающей антенной, усилителя высокой частоты и фазового детектора, второй вход которого соединен с выходом задающего генератора, передающий радиомодем выполнен в виде последовательно подключенных к выходу фазового детектора линии задержки, сумматора, второй вход которого соединен с выходом генератора псевдослучайной последовательности, фазового манипулятора и усилителя мощности, выход которого соединен с вторым входом циркулятора, приемный радиомодем выполнен в виде удвоителя фазы, делителя фазы на два, первого и второго узкополосных фильтров, последовательно включенных приемной антенны, усилителя высокой частоты и фазового детектора, выход которого подключен к ЭВМ, электронный идентификатор выполнен в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, встречно-штыревой преобразователь содержит две гребенчатые системы электродов, электроды каждой из гребенок соединены друг с другом шинами, связанными с микрополосковой антенной, отличающаяся тем, что передающий модем снабжен регенеративным делителем, состоящим из последовательно подключенных к выходу задающего генератора смесителя, второго узкополосного фильтра, умножителя частоты на n, первого узкополосного фильтра, умножителя частоты на и третьего узкополосного фильтра, выход которого соединен с вторым входом смесителя, в приемном радиомодеме к выходу усилителя высокой частоты последовательно подключены удвоитель фазы, первый узкополосный фильтр, делитель фазы на два и второй узкополосный фильтр, выход которого соединен с вторым входом фазового детектора.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА В ЗАКРЫТЫХ ПОМЕЩЕНИЯХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2351945C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА В ЗАКРЫТЫХ ПОМЕЩЕНИЯХ | 2004 |
|
RU2284542C2 |
| US 7786978 B2, 31.08.2010 | |||
| US 4916455 А, 10.04.1990. | |||

