ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Данная заявка испрашивает приоритет по патентной заявке Японии № 2007-129089, поданной 15 мая 2007, и патентной заявке Японии № 2008-097153, поданной 3 апреля 2008, содержание которых включено в настоящую заявку посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится к портативному приводному инструменту, а конкретно, относится к конструкции для захвата портативного приводного инструмента.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
В патентном документе 1 и патентном документе 2, как представлено ниже, раскрыты портативные приводные инструменты. Данные портативные приводные инструменты содержат двигатель, который вращает насадку отвертки, и корпус, который вмещает в себя двигатель. На задней оконечной поверхности, расположенной на задней стороне корпуса, противоположной от стороны для инструмента, сформирован задний оконечный желобок, в который пользователь может помещать область кожи между большим пальцем и указательным пальцем. В обеих боковых поверхностях корпуса сформирована пара желобков боковых поверхностей, в которые могут помещаться большой палец и указательный палец. В соответствии с конструкцией, описанной в патентном документе 1 и патентном документе 2, пользователь, посредством помещения области кожи между большим пальцем и указательным пальцем в задний оконечный желобок и помещения большого пальца и указательного пальца в пару желобков боковых поверхностей, может непосредственно захватывать корпус со стороны задней оконечной поверхности. Когда корпус захвачен непосредственно со стороны задней оконечной поверхности, можно легко применять силу вдоль оси вращения инструмента, и пользователь может с силой давить приводной инструмент на обрабатываемый объект.
Патентный документ 1: публикация патентной заявки Японии № 2000-167785.
Патентный документ 2: публикация патентной заявки Японии № 2006-123086.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА, РЕШАЕМАЯ ПОСРЕДСТВОМ ИЗОБРЕТЕНИЯ
Что касается описанного выше приводного инструмента предыдущего уровня техники, то с помощью непосредственного захвата корпуса со стороны задней оконечной поверхности, пользователь может с силой давить приводной инструмент на обрабатываемый объект. Однако, если корпус захвачен непосредственно со стороны задней оконечной поверхности и приводной инструмент тянут вверх или поднимают вверх, на пользователя сильно воздействует масса приводного инструмента. Следовательно, при использовании приводного инструмента предыдущего уровня техники, например, в работе в течение долгого периода времени, существует проблема, что пользователь имеет тенденцию уставать. В свете этой проблемы данное изобретение предоставляет портативный приводной инструмент, который вряд ли будет утомлять пользователя, даже когда корпус захвачен непосредственно со стороны задней оконечной поверхности.
СРЕДСТВО РЕШЕНИЯ ТЕХНИЧЕСКОЙ ЗАДАЧИ
Приводной инструмент данного изобретения содержит первичный двигатель, который заставляет инструмент вращаться, и корпус, который вмещает в себя первичный двигатель. В задней оконечной поверхности корпуса, которая расположена на стороне, противоположной стороне для инструмента, сформирован задний оконечный желобок, в котором пользователь может расположить его/ее область кожи между его/ее большим пальцем и указательным пальцем. В обеих боковых поверхностях корпуса сформирована пара желобков боковых поверхностей, в которые пользователь может помещать его/ее большой палец и указательный палец. В соответствии с данным приводным инструментом, посредством помещения области кожи между большим пальцем и указательным пальцем в задний оконечный желобок и помещения большого пальца и указательного пальца в пару желобков боковых поверхностей, пользователь может непосредственно захватывать корпус со стороны задней оконечной поверхности. Когда корпус захвачен непосредственно со стороны задней оконечной поверхности, пользователь может с силой давить приводной инструмент на обрабатываемый объект.
В описанном выше приводном инструменте является предпочтительным, что, по меньшей мере, в одном из желобков боковых поверхностей сформирован участок с изменяющейся глубиной, таким образом, что его глубина уменьшается по направлению к задней оконечной поверхности корпуса. С участком с изменяющейся глубиной поверхность каждого желобка боковой поверхности скошена таким образом, что она обращена по направлению к стороне для инструмента. В соответствии с данной конфигурацией, когда пользователь прикладывает силу, чтобы тянуть приводной инструмент, предотвращается скольжение большого пальца и/или указательного пальца вдоль желобков боковых поверхностей.
В дополнение к описанному выше участку с изменяющейся глубиной является предпочтительным, что, по меньшей мере, в одном из желобков боковых поверхностей на участке с изменяющейся глубиной со стороны для инструмента сформирован участок с постоянной глубиной, имеющий по существу постоянную глубину. Когда пользователь прикладывает силу давления к приводному инструменту, если кончик пальца пользователя расположен на участке с изменяющейся глубиной желобка боковой поверхности, кончик пальца пользователя имеет тенденцию скользить по желобку боковой поверхности. Следовательно, является предпочтительным, что глубина желобка боковой поверхности является по существу постоянной на участке по направлению к стороне для инструмента по отношению к участку с изменяющейся глубиной.
Является предпочтительным, что, по меньшей мере, в одном из желобков боковых поверхностей сформирован, по меньшей мере, один выступ. В соответствии с данной конструкцией между поверхностью желобка боковой поверхности и большим пальцем и/или указательным пальцем может быть создана большая сила трения. Пользователь тогда может легко тянуть приводной инструмент вверх.
В описанном выше приводном инструменте является предпочтительным, что задний оконечный желобок, сформированный в корпусе, становится глубже по направлению к заднему концу корпуса. В соответствии с данной конструкцией область кожи между большим пальцем и указательным пальцем пользователя, помещенная в задний оконечный желобок, прочно входит в задний оконечный желобок. Предотвращается вывод из зацепления области кожи из заднего оконечного желобка, и поэтому пользователь может ощущать, что приводной инструмент становится легче.
В описанном выше приводном инструменте является предпочтительным, что отбортованный участок, выступающий из корпуса, сформирован в верхней части заднего оконечного желобка. Является предпочтительным, что данный отбортованный участок значительно выступает по направлению к заднему концу корпуса. В соответствии с данной конструкцией отбортованный участок примыкает сверху к области кожи пользователя, помещенной в задний оконечный желобок. По причине того что область кожи удерживается внутри заднего оконечного желобка, пользователь может ощущать, что приводной инструмент становится легче.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 представляет собой внешний вид сбоку приводной дрели;
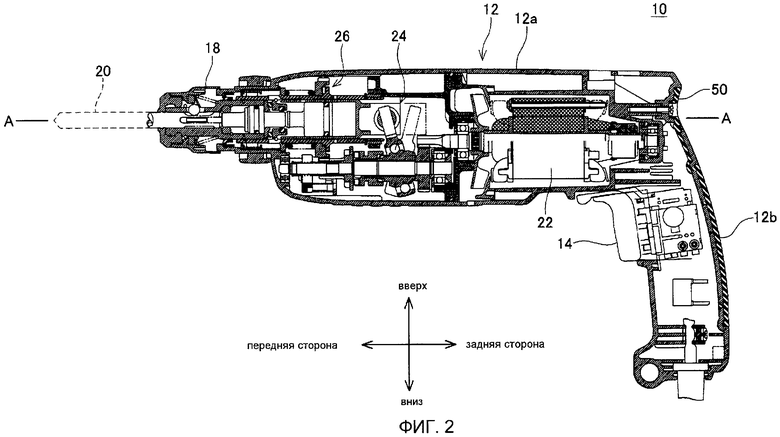
Фиг. 2 представляет собой изображение поперечного сечения, показывающее внутреннюю конструкцию приводной дрели;
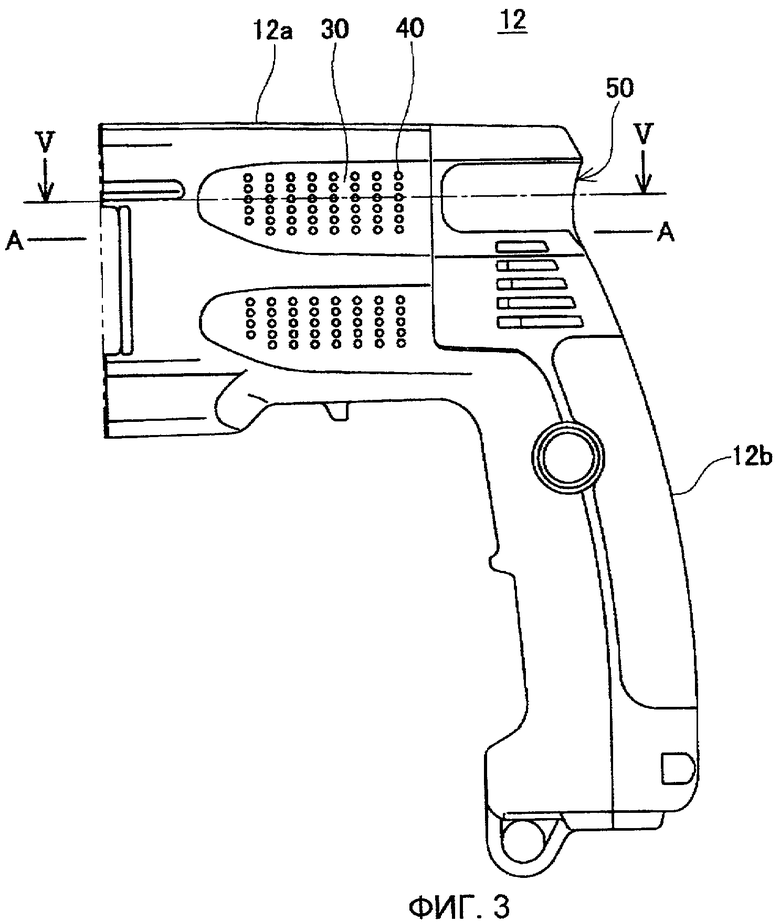
Фиг. 3 показывает вид сбоку участка корпуса, который находится на противоположной стороне от стороны, где находится сверло;
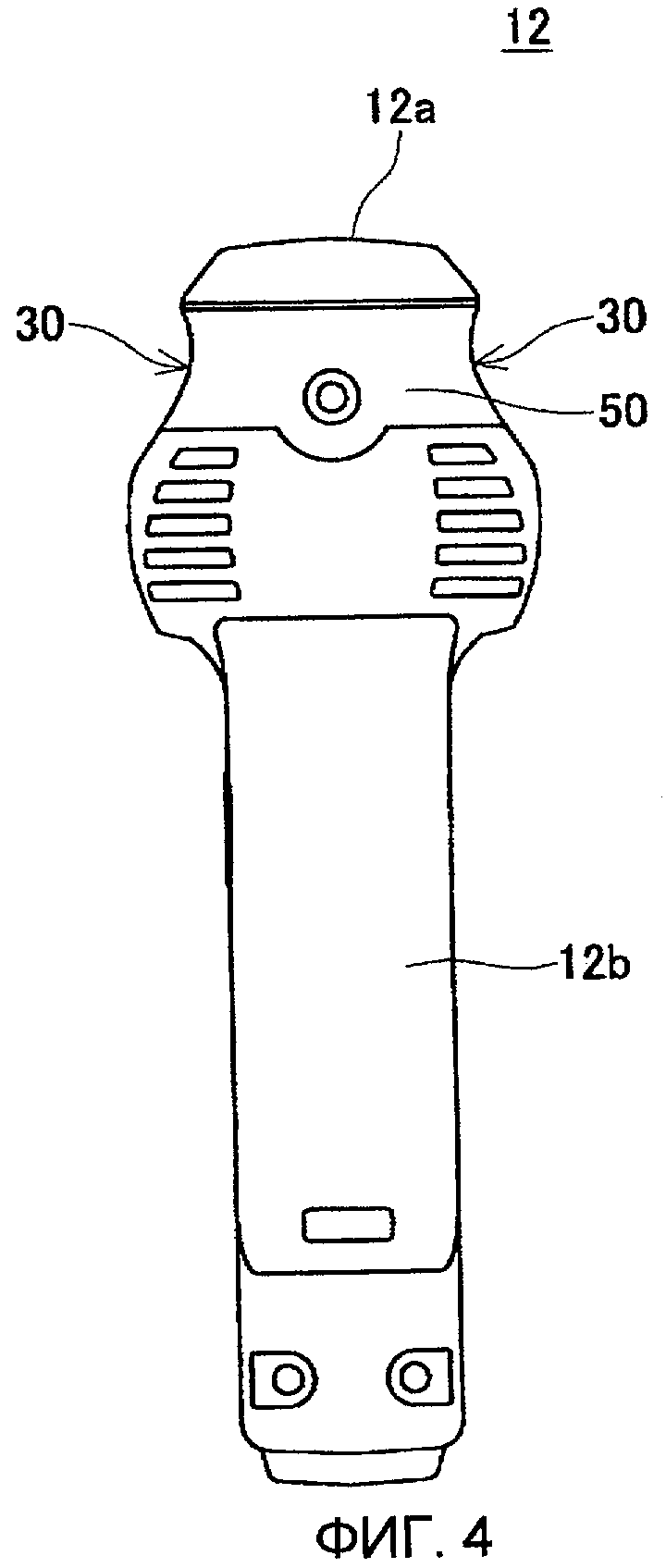
Фиг. 4 показывает изображение участка корпуса со стороны, противоположной от сверла;
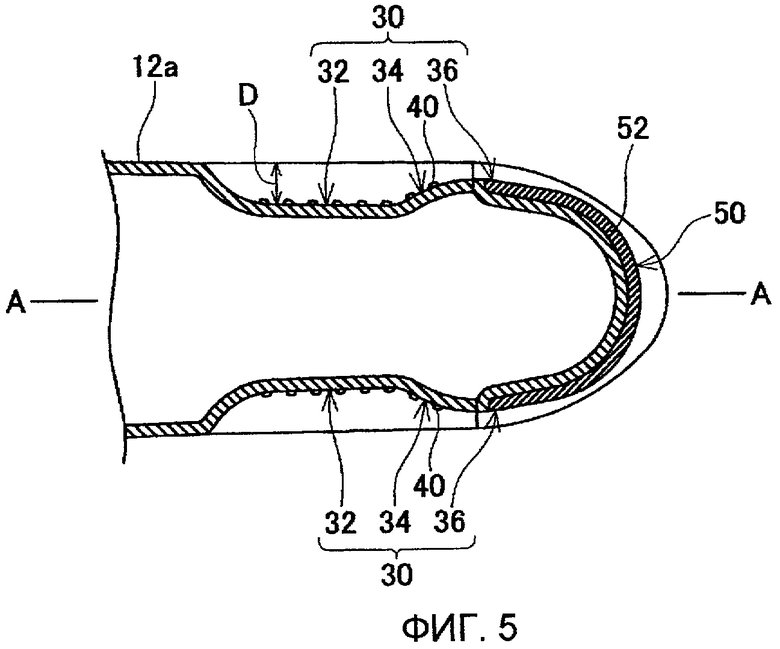
Фиг. 5 показывает поперечное сечение по линии V-V на Фиг. 3;
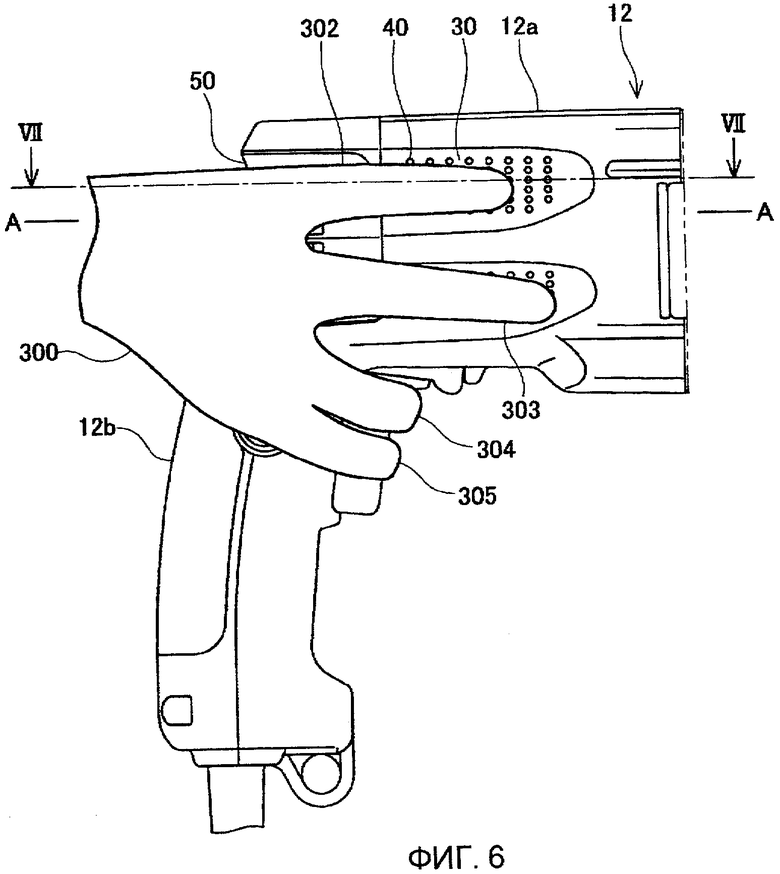
Фиг. 6 показывает способ захвата приводной дрели (при надавливании);
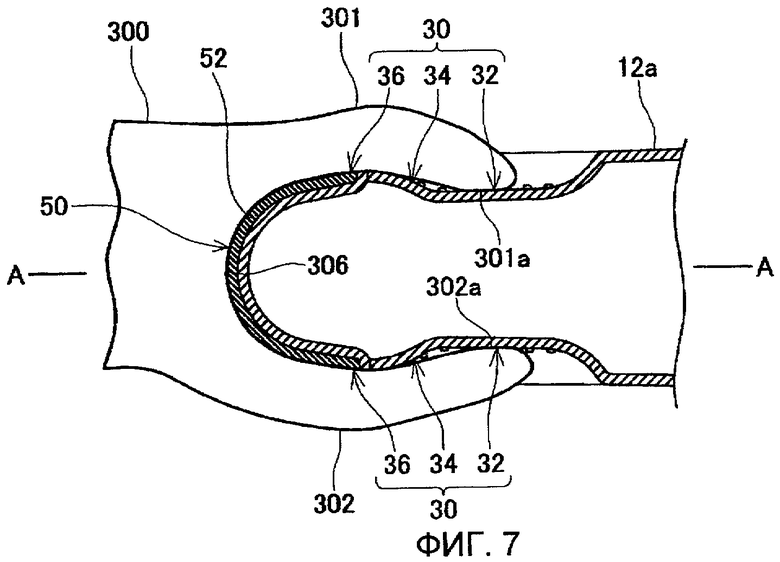
Фиг. 7 показывает поперечное сечение по линии VII-VII на Фиг. 6;
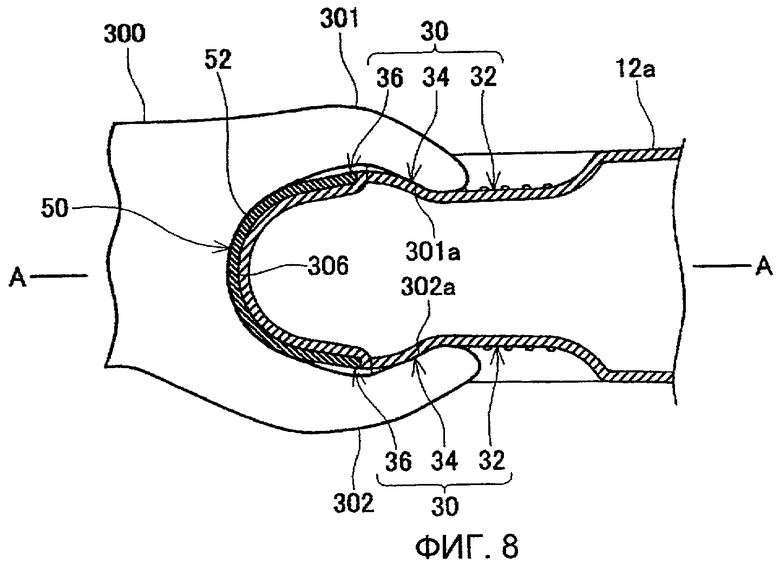
Фиг. 8 показывает способ захвата приводной дрели (при вытягивании);
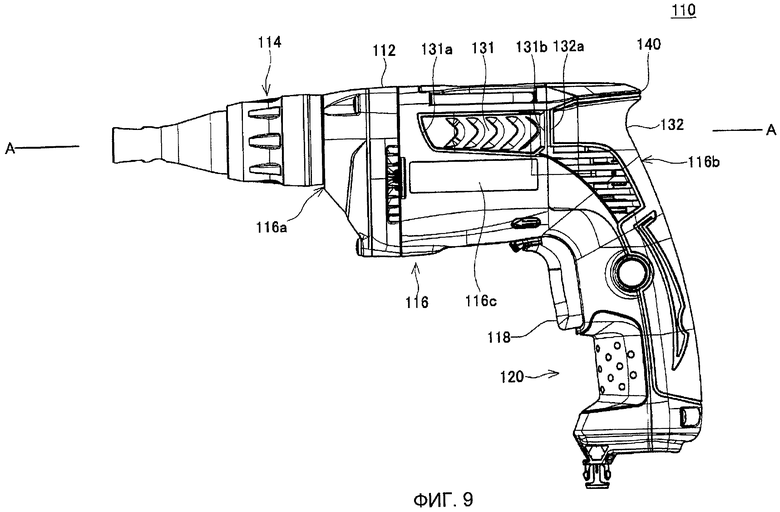
Фиг. 9 представляет собой изображение одной стороны приводного шуруповерта;
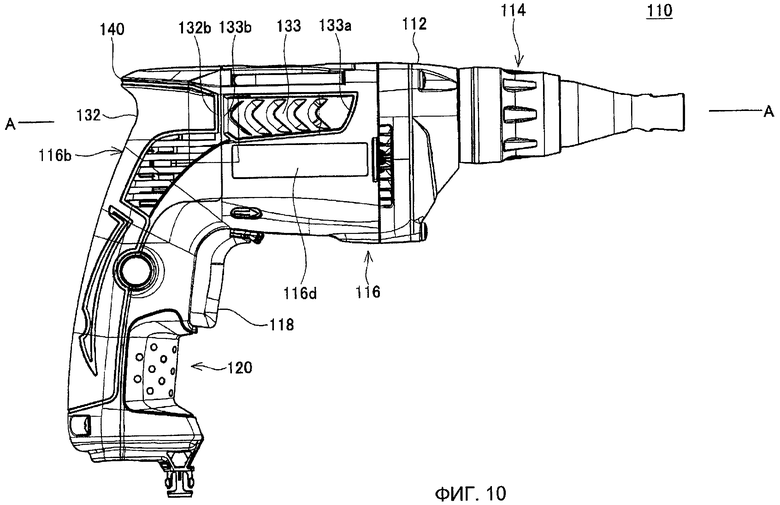
Фиг. 10 представляет собой изображение другой стороны приводного шуруповерта;
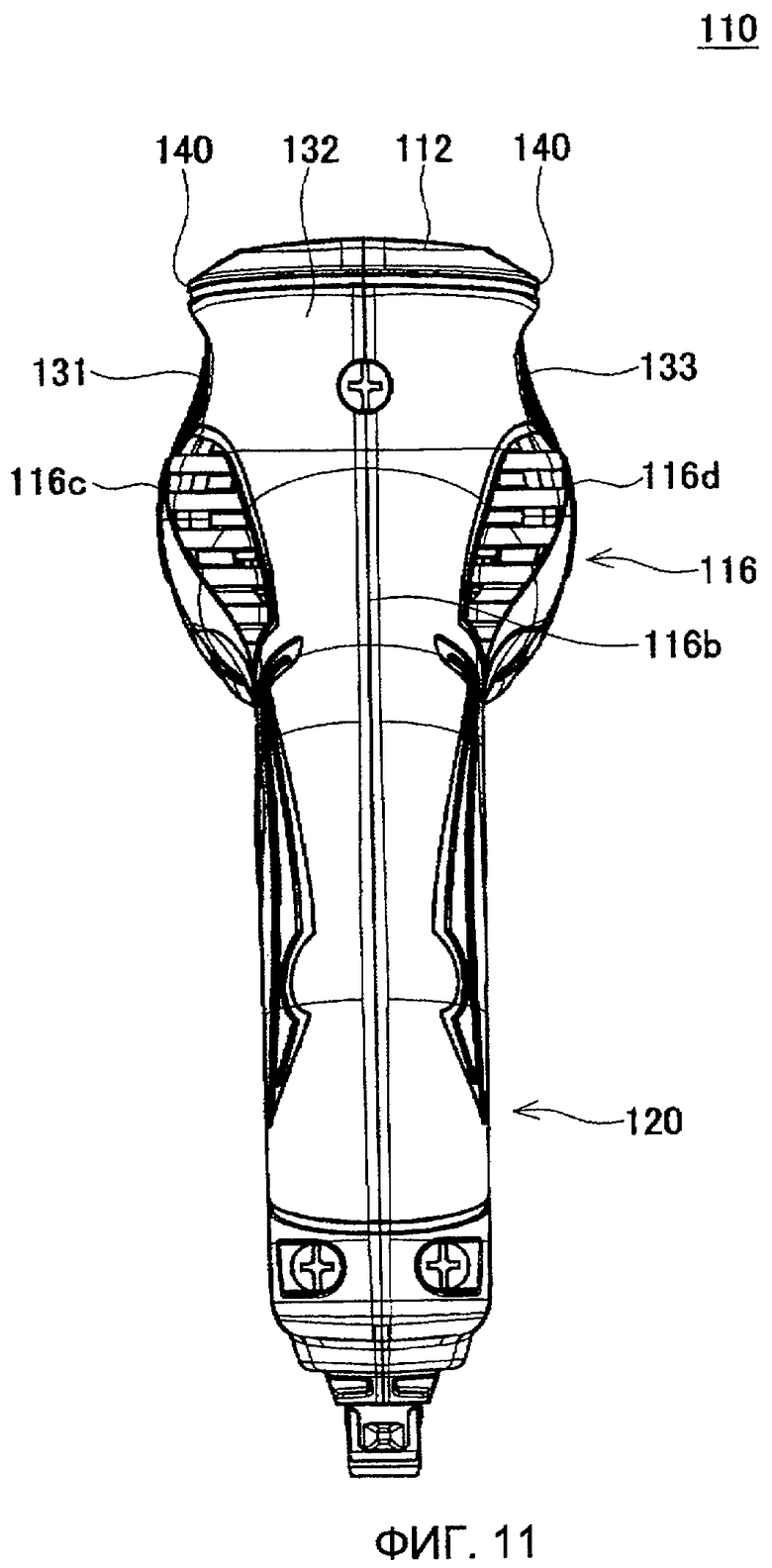
Фиг. 11 показывает задний оконечный участок приводного шуруповерта;
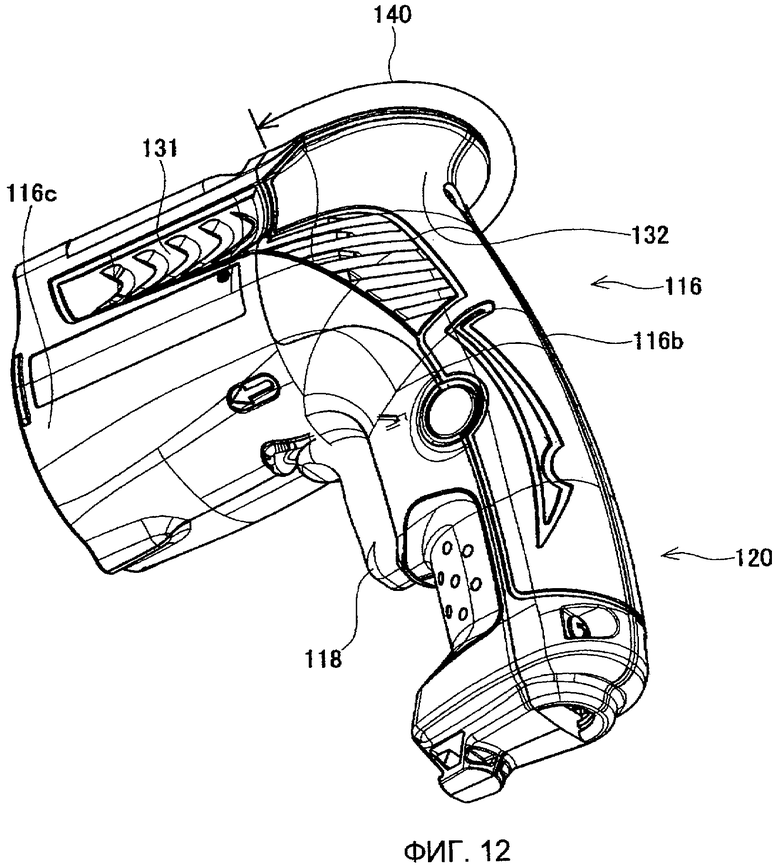
Фиг. 12 показывает задний оконечный участок приводного шуруповерта, изображенный в перспективе снизу вверх;
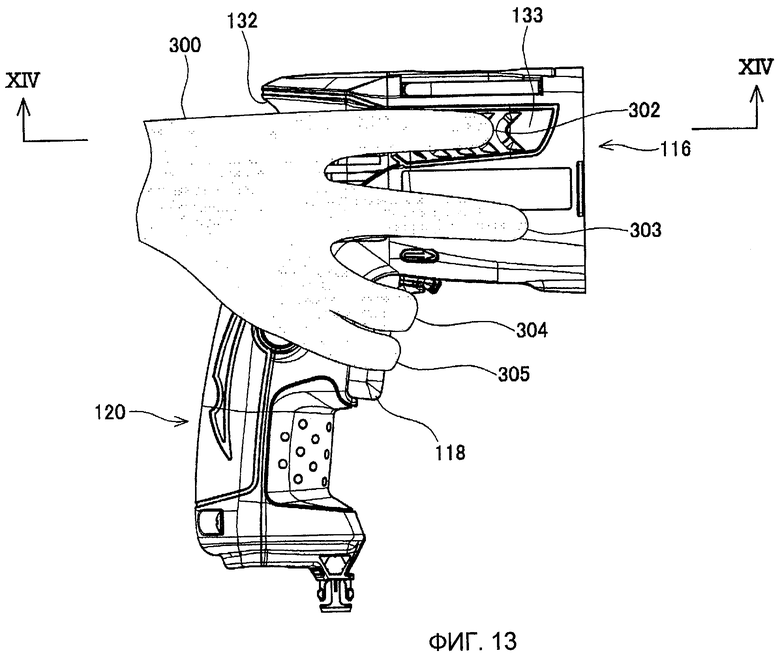
Фиг. 13 показывает способ, которым пользователь захватывает приводной шуруповерт;
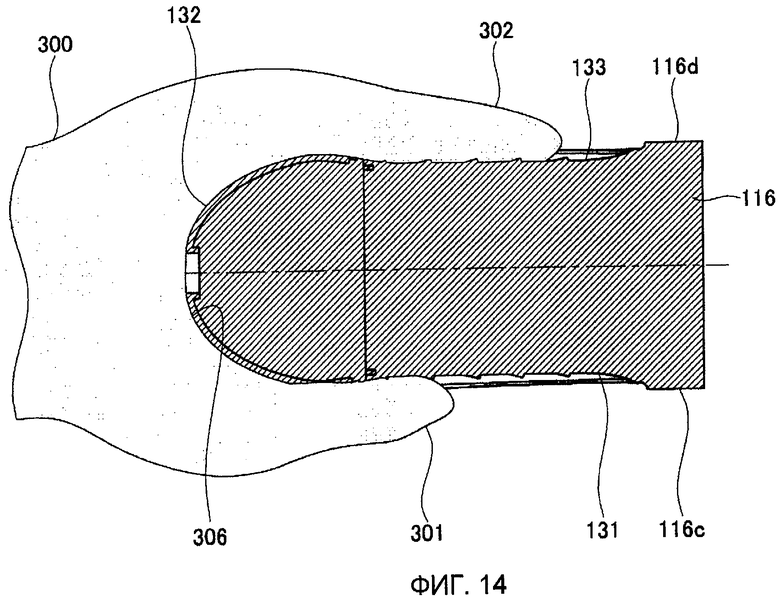
Фиг. 14 показывает поперечное сечение по линии XIV-XIV на Фиг. 13;
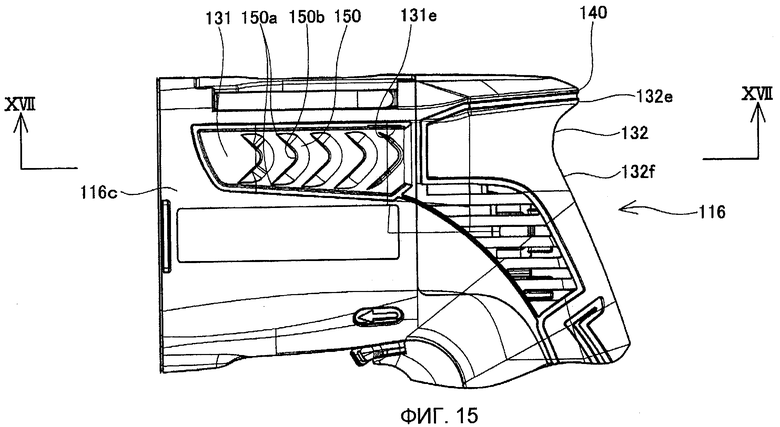
Фиг. 15 показывает изображение одной стороны участка тела корпуса;
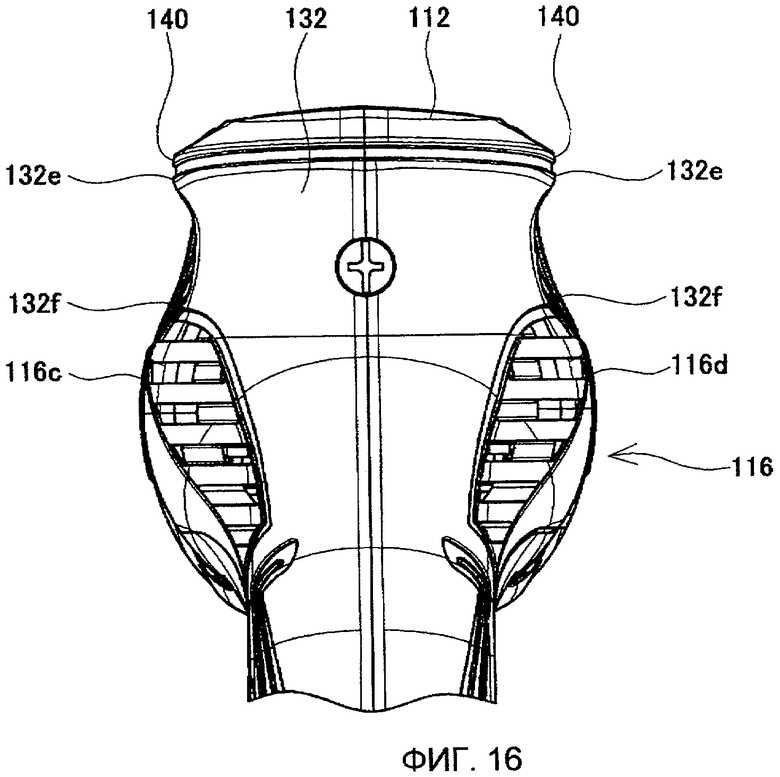
Фиг. 16 показывает заднюю оконечную часть участка тела корпуса; а
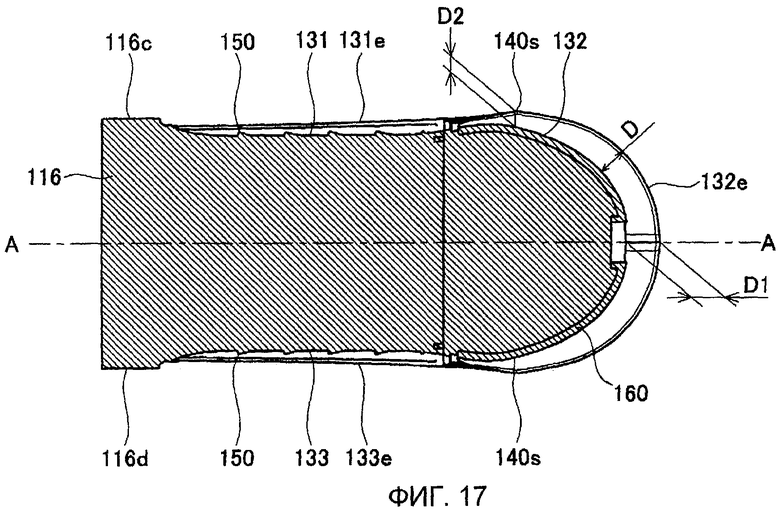
Фиг. 17 показывает поперечное сечение по линии XVII-XVII на Фиг. 15.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
ПРЕДПОЧТИТЕЛЬНЫЕ ПРИЗНАКИ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
(Признак 1) Корпус содержит участок тела корпуса, простирающийся вдоль оси вращения инструмента, и участок захвата, простирающийся от участка тела корпуса. В задней оконечной поверхности участка тела корпуса, которая расположена на противоположной стороне от инструмента, сформирован задний оконечный желобок, в который пользователь может помещать его/ее область кожи между его/ее большим пальцем и указательным пальцем. В обеих боковых поверхностях участка тела корпуса сформирована пара желобков боковых поверхностей, в которые пользователь может помещать большой палец и указательный палец. Ниже оси вращения инструмента предоставлен участок захвата, а выше оси вращения инструмента предоставлены желобки боковых поверхностей и задний оконечный желобок.
(Признак 2) На участке захвата предоставлен переключатель пускового механизма. Пользователь может приводить в действие переключатель пускового механизма большим пальцем и указательным пальцем, помещенными в пару желобков боковых поверхностей, с использованием безымянного пальца и/или мизинца.
(Признак 3) Пара желобков боковых поверхностей обладает зеркальной симметрией.
(Признак 4) В паре желобков боковых поверхностей сформированы многочисленные выступы. Многочисленные выступы предоставлены в обоих участках с изменяющейся глубиной и в участках с постоянной глубиной. Многочисленные выступы сформированы из материала, который является более мягким, чем корпус, и который имеет более высокий коэффициент трения, чем корпус. Многочисленные выступы могут, например, быть сформированы с использованием эластомера.
(Признак 5) В заднем оконечном желобке предоставлен листовой материал, который является более мягким, чем корпус.
Вариант осуществления 1
Приводная дрель первого варианта осуществления объясняется со ссылкой на чертежи. Приводная дрель первого варианта осуществления представляет собой портативный приводной инструмент, а конкретно представляет собой приводной инструмент, используемый при формировании отверстий.
Фиг. 1 показывает внешний вид сбоку приводной дрели 10 первого варианта осуществления. Фиг. 2 представляет собой изображение поперечного сечения приводной дрели 10, показанной на Фиг. 1. Как показано на Фиг. 1 и Фиг. 2, приводная дрель 10 содержит двигатель 22, инструментальный патрон 18, вращаемый двигателем 22, и редукторный механизм 26, который усиливает крутящий момент двигателя 22 и передает крутящий момент на инструментальный патрон 18. Сверло 20, которое представляет собой инструмент для сверления отверстий, может устанавливаться в инструментальный патрон 18 с возможностью отсоединения. Приводная дрель 10 может сверлить отверстия в древесине, металлических материалах, бетонных материалах и других материалах. Приводная дрель 10 также содержит ударный механизм 24, который трансформирует вращательное движение двигателя 22 в возвратно-поступательное движение, чтобы приложить ударную силу на сверло 20, установленное в инструментальном патроне 18. Приводная дрель 10 может заставить ударный механизм 24 функционировать избирательно, например, при выполнении отделочных работ.
Приводная дрель 10 содержит корпус 12, который вмещает в себя двигатель 22, ударный механизм 24, редукторный механизм 26 и т.п. Корпус 12 сформирован, главным образом, из прочного пластмассового материала. Корпус 12 содержит участок тела корпуса 12a, по существу, со столбчатой формой вдоль оси вращения A-A сверла 20, и участок захвата 12b, простирающийся от оконечной части участка тела корпуса 12a, на стороне, противоположной сверлу (правая сторона на Фиг. 1 и Фиг. 2). Участок захвата 12b простирается вниз на Фиг. 1 и Фиг. 2 и образует предусмотренный угол с осью вращения A-A сверла 20. В целом, корпус 12 имеет, по существу, L-образную форму. Участок захвата 12b предоставлен с переключателем пускового механизма 14, который представляет собой пусковой переключатель для приводной дрели 10. И, как показано на Фиг. 1, боковая рукоятка 16 предоставлена на оконечной части на стороне сверла (левая сторона на Фиг. 1 и Фиг. 2) участка тела корпуса 12a. На Фиг. 1 боковая рукоятка 16 простирается перпендикулярно плоскости рисунка.
В дальнейшем, ось вращения A-A сверла 20 называется «ось вращения инструмента A-A”, оконечная часть участка тела корпуса 12a на стороне сверла (левая сторона на Фиг. 1 и Фиг. 2) называется “передняя оконечная часть” участка тела корпуса 12a, а оконечная часть участка тела корпуса 12a на противоположной от сверла стороне (правая сторона на Фиг. 1 и Фиг. 2) называется “задняя оконечная часть” участка тела корпуса 12a.
Как показано на Фиг. 1, желобок 30 сформирован в боковой поверхности участка тела корпуса 12a, простираясь от задней оконечной части вдоль оси вращения инструмента A-A. На Фиг. 1 желобок 30 сформирован выше оси вращения инструмента A-A. Необязательно, чтобы весь желобок 30 был расположен выше оси вращения инструмента A-A; достаточно, чтобы, по меньшей мере, самый глубокий участок желобка 30 был расположен выше оси вращения инструмента A-A. Как будет описано подробно позднее, в боковой поверхности на противоположной стороне также сформирован еще один желобок 30, хотя и не показанный на Фиг. 1. Пара желобков 30, сформированных в боковых поверхностях участка тела корпуса 12a, сформирована симметрично и в положениях выше оси вращения инструмента A-A (см. Фиг. 4).
В паре желобков 30 сформировано множество выступов 40. Выступы 40 сформированы из материала, более мягкого, чем корпус 12. Выступы 40 сформированы из материала, имеющего более высокий коэффициент трения, чем корпус 12. В данном варианте осуществления выступы 40 сформированы из эластомера. В задней оконечной поверхности участка тела корпуса 12a (поверхность на конце с правой стороны на Фиг. 1) сформирован желобок 50, соединяя пару желобков 30. Выступы 40 сформированы не только в паре желобков 30, но также в областях, расположенных ниже пары желобков 30.
В дальнейшем, желобки 30, сформированные в боковых поверхностях участка тела корпуса 12a, называются “желобки боковых поверхностей 30”, а желобок 50, сформированный в задней оконечной поверхности участка тела корпуса 12a, называется “задний оконечный желобок 50”.
Пара желобков боковых поверхностей 30 и задний оконечный желобок 50, сформированные в участке тела корпуса 12a, разъясняются со ссылкой на Фиг. 3-5. Фиг. 3 показывает, по существу, половину стороны корпуса 12, которая противоположна сверлу. Фиг. 4 показывает корпус 12, видимый со стороны, противоположной сверлу. Фиг. 5 показывает поперечное сечение по линии V-V на Фиг. 3. Как показано на Фиг. 3-5, пара желобков боковых поверхностей 30 и задний оконечный желобок 50 образуют ряд желобков, протягивающихся таким образом, чтобы описать, по существу, U-образную форму. Формы поперечного сечения пары желобков боковых поверхностей 30 и заднего оконечного желобка 50 представляют собой изогнутые внутрь поверхности.
Как показано на Фиг. 5, каждый из пары желобков боковых поверхностей 30 может быть разделен, в соответствии с его глубиной D, на первый участок 32, второй участок 34 и третий участок 36. Первый участок 32 представляет собой участок, в котором глубина D является по существу постоянной. Первый участок 32 расположен на передней оконечной стороне (стороне сверла) участка тела корпуса 12a по отношению ко второму участку 34. Второй участок 34 представляет собой участок, в котором глубина D уменьшается от передней оконечной стороны по направлению к задней оконечной стороне участка тела корпуса 12a; его поверхность постепенно поднимается таким образом, чтобы она была обращена к передней оконечной стороне участка тела корпуса 12a. Второй участок 34 расположен на передней оконечной стороне (стороне сверла) участка тела корпуса 12a по отношению к третьему участку 36. Третий участок 36 представляет собой участок, в котором глубина D является по существу постоянной. Глубина D третьего участка 36 меньше, чем глубина D первого участка 32.
Описанные выше многочисленные выступы 40 предоставлены в первых участках 32 и вторых участках 34 пары желобков боковых поверхностей 30. А в заднем оконечном желобке 50 предоставлена поддающаяся деформации пластина 52, сформированная из эластомера. Поддающаяся деформации пластина 52 является более гибкой, чем корпус 12, и имеет более высокое сопротивление трению, чем корпус 12.
Фиг. 6 и Фиг. 7 показывают способ, которым пользователь захватывает приводную дрель 10. Как показано на Фиг. 6 и Фиг. 7, пользователь помещает его/ее большой палец 301 и указательный палец 302 в пару желобков боковых поверхностей 30, помещает его/ее средний палец 303 на боковую поверхность участка тела корпуса 12 и помещает его/ее безымянный палец 304 и/или мизинец 305 на участок захвата 12b. Таким образом, приводная дрель 10 может быть крепко захвачена. В то же время, его/ее участок области кожи 306 между большим пальцем 301 и указательным пальцем 302 помещается в задний оконечный желобок 50.
Как показано на Фиг. 7, кончики пальцев 301a, 302a большого пальца 301 и указательного пальца 302 располагаются в первых участках 32 пары желобков боковых поверхностей 30. Положения кончиков пальцев 301a, 302a могут изменяться в зависимости от размера руки 300 пользователя. Для приводной дрели 10 данного варианта осуществления в пределах первых участков 32 спроектирована, по существу, постоянная глубина, и поэтому приводная дрель 10 может быть захвачена правильно, независимо от размера руки 300 пользователя. Переключателем пускового механизма 14 управляют безымянным пальцем 304 и/или мизинцем 305. Пользователь может держать боковую рукоятку 16 другой рукой.
В пространственном положении захвата, показанном на Фиг. 6 и Фиг. 7, рука 300 пользователя располагается выше оси вращения инструмента A-A. Следовательно, пользователь может давить приводную дрель 10 с большой силой вдоль оси вращения инструмента A-A. Пользователь легко может с силой давить сверло 20 на обрабатываемый объект, и даже в сравнительно твердых обрабатываемых объектах могут быть легко сформированы отверстия.
После формирования отверстия с использованием приводной дрели 10 пользователь должен вытащить сверло 20 из отверстия, которое было сформировано. Для того чтобы вытащить сверло 20 из отверстия, которое было сформировано, необходимо сравнительно сильно потянуть приводную дрель 10 вдоль оси вращения инструмента A-A. Фиг. 8 показывает способ, которым на приводную дрель 10 прикладывают тянущую силу вдоль оси вращения инструмента A-A. Фиг. 8 соответствует Фиг. 7. Как становится ясно при сравнивании Фиг. 7 и Фиг. 8, при переходе от прикладывания на приводную дрель 10 силы давления к прикладыванию тянущей силы меняются положения кончиков пальцев 101a и 102a большого пальца 101 и указательного пальца 102. Как показано на Фиг. 8, при прикладывании к приводной дрели 10 тянущей силы пользователь может располагать кончики пальцев 301a, 302a большого пальца 301 и указательного пальца 302 во вторых участках 34 соответствующих желобков 30. Как объяснялось выше, во вторых участках 34 желобков 30 глубина D уменьшается от передней оконечной стороны участка тела корпуса 12a по направлению к задней оконечной стороне, а поверхность скошена таким образом, чтобы быть обращенной к передней оконечной стороне участка тела корпуса 12a. Кроме того, во вторых участках 34 желобков 30 сформированы многочисленные выступы 40. Следовательно, пользователь со сравнительно значительной силой может тянуть приводную дрель 10 вдоль оси вращения инструмента A-A без скольжения большого пальца 301 и указательного пальца 302. Используя данную конфигурацию, сверло 20 может легко быть вытянуто из отверстия, которое было сформировано.
В дополнение к захватывающему пространственному положению, показанному на Фиг. 6-8, пользователь может захватывать участок захвата 12b с использованием всех пальцев с 301 по 305, чтобы держать приводную дрель 10. Кроме того, в этом случае пользователь может захватывать боковую рукоятку 16 еще и другой рукой.
Выше была подробно объяснена приводная дрель 10 первого варианта осуществления; но это всего лишь пример, и он никоим образом не ограничивает объем правовых притязаний формулы изобретения. Технология, описанная в рамках формулы изобретения, содержит различные модификации и изменения конкретного примера, описанного выше.
Например, выступы 40, сформированные в паре желобков боковых поверхностей 30, в дополнение к форме растровой точки в описанном выше варианте осуществления, могут быть сформированы с формами линий, такими как, например, в дактилоскопических узорах. Также, когда, например, пользователь надевает толстые перчатки во время работы, эффективно формировать выступы 40 из материала, более прочного, чем в корпусе 12.
Технология, использованная в приводной дрели 10 первого варианта осуществления, может быть применена в различных других приводных дрелях. Преимущественные эффекты настоящих технологий сохраняются при применении с любым типом первичного двигателя приводного инструмента (например, электрическим двигателем, двигателем на сжимаемых текучих средах, двигателем внутреннего сгорания) или при выполнении задачи для приводного инструмента (например, вскрывание отверстий, затягивание винтов, отделка).
Вариант осуществления 2
Применение в приводном шуруповерте второго варианта осуществления объясняется со ссылкой на чертежи. Приводной шуруповерт данного варианта осуществления представляет собой портативный приводной инструмент и представляет собой приводной инструмент, используемый главным образом для задач, связанных с затягиванием винтов.
Фиг. 9 представляет собой изображение одной стороны приводного шуруповерта 110. Фиг. 10 представляет собой изображение другой стороны приводного шуруповерта 110. Фиг. 11 показывает задний конец приводного шуруповерта 110.
Как показано на Фиг. 9, приводной шуруповерт 110 содержит корпус 112 и инструментальный патрон 114, свободно вращающийся в корпусе 112. Наконечник шуруповерта, который представляет собой инструмент для затягивания шурупов, может быть установлен с возможностью отсоединения в инструментальный патрон 114. Инструментальный патрон 114 приводится во вращение двигателем (непоказанным), заключенным внутри корпуса 112.
Корпус 112 формируют, главным образом, из твердой пластмассы. Корпус 112 имеет, в целом, по существу, L-образную форму и содержит участок тела корпуса 116 и участок захвата 120. Участок тела корпуса 116 простирается от передней оконечной части 116a, расположенной на стороне инструментального патрона 114, вдоль оси вращения A-А инструментального патрона 114, к задней оконечной части 116b, расположенной на стороне, противоположной от инструментального патрона 114. В данной работе ось вращения A-А инструментального патрона 114 приравнивается к оси вращения наконечника шуруповерта, установленного в инструментальный патрон 114. Ниже ось вращения A-А инструментального патрона 114 может называться “ось вращения A-A инструмента”.
Участок захвата 120 простирается от задней оконечной части 116b участка тела корпуса 116 таким образом, что образует угол с участком тела корпуса 116. Как показано на Фиг. 9 и Фиг. 10, корпус 112, в целом, представлен в L-образной форме. Участок захвата 120 предоставлен с переключателем пускового механизма 118 для запуска приводного шуруповерта 110.
Как показано на Фиг. 8, Фиг. 9 и Фиг. 10, в боковых поверхностях 116c, 116d участка тела корпуса 116 сформированы желобки боковых поверхностей 131, 133. Желобки боковых поверхностей 131, 133 предоставлены на участках боковых поверхностей 116c, 116d участка тела корпуса 116 на стороне задней оконечной части 116b. Желобок боковой поверхности 131, сформированный в одной боковой поверхности 116c, простирается, по существу, по прямой линии вдоль оси вращения инструмента A-A от переднего конца 131a к заднему концу 131b. Точно так же желобок боковой поверхности 133, сформированный в другой боковой поверхности 116d, простирается, по существу, по прямой линии вдоль оси вращения инструмента A-A от переднего конца 133a к заднему концу 133b. Пара желобков боковых поверхностей 131, 133 сформирована симметрично, охватывая участок тела корпуса 116.
Задний оконечный желобок 132 сформирован в задней оконечной части 116b участка тела корпуса 116. Один конец 132a заднего оконечного желобка 132 соединен с задним концом 131b одного желобка боковой поверхности 131, а другой конец 132b заднего оконечного желобка 132 соединен с задним концом 133b другого желобка боковой поверхности 133. То есть, посредством заднего оконечного желобка 132, соединена вместе пара желобков боковых поверхностей 131, 133. Пара желобков боковых поверхностей 131, 133 и задний оконечный желобок 132 образуют ряд желобков, простирающихся от одной боковой поверхности 116c участка тела корпуса 116, к задней оконечной части 116b, к другой боковой поверхности 116d.
Совокупность желобков боковых поверхностей 131, 133 и задний оконечный желобок 132 сформированы выше оси вращения A-А инструментального патрона 114. Однако совокупность желобков боковых поверхностей 131, 133 и заднего оконечного желобка 132 не расположена выше оси вращения A-A, а выше оси вращения инструмента A-A расположены самые глубокие участки желобков боковых поверхностей 131, 133 и задний оконечный желобок 132.
Фиг. 12 показывает заднюю оконечную часть 116b участка тела корпуса 116, изображенную в перспективе снизу вверх. Как показано на Фиг. 9, Фиг. 10, Фиг. 11 и Фиг. 12, в задней оконечной части 116b участка тела корпуса 116, в верхней части заднего оконечного желобка 132 сформирован отбортованный участок 140. Отбортованный участок 140 выступает в форме борта в направлении, в котором открывается задний оконечный желобок 132 (боковые направления и обратное направление приводного шуруповерта 110).
Фиг. 13 и Фиг. 14 показывают способ, в котором пользователь захватывает приводной шуруповерт 110 правой рукой 300. Как показано на Фиг. 13 и Фиг. 14, большой палец пользователя 301 помещают в один желобок боковой поверхности 131, а его/ее указательный палец 302 помещают в другой желобок боковой поверхности 133. Средний палец пользователя 303 помещают на другой боковой поверхности 116c участка тела корпуса 116. Его/ее участок области кожи 306 между большим пальцем 301 и указательным пальцем 302 помещают в задний оконечный желобок 132. Безымянный палец пользователя 304 и мизинец 305 помещают на переключатель пускового механизма 118 участка захвата 120. Таким образом, при использовании приводного шуруповерта 110 данного варианта осуществления пользователь может принять пространственное положение захвата, в котором непосредственно захватывается задняя оконечная часть 116b участка тела корпуса 116.
В пространственном положении захвата, показанном на Фиг. 13 и Фиг. 14, рука пользователя 300 расположена выше оси вращения инструмента A-A. Следовательно, пользователь может давить приводной шуруповерт 110 вдоль оси вращения инструмента A-A со значительной силой. Пользователь может с силой давить наконечник шуруповерта на обрабатываемый объект и может легко затягивать шуруп даже в сравнительно твердый обрабатываемый объект.
В дополнение к пространственному положению захвата, показанному на Фиг. 13 и Фиг. 14, пользователь может также использовать пространственное положение захвата, в котором, чтобы захватить участок захвата 20, используются все пальцы с 301 по 305.
Далее со ссылкой на Фиг. 15, Фиг. 16 и Фиг. 17 подробно разъясняются конструкции желобков боковых поверхностей 131, 133 и заднего оконечного желобка 132, сформированных в участке тела корпуса 116. Фиг. 15 показывает одну боковую поверхность 116c участка тела корпуса 116. Фиг. 16 показывает заднюю оконечную часть 116b участка тела корпуса 116. Фиг. 17 представляет собой изображение поперечного сечения вдоль линии XVII-XVII на Фиг. 15.
Многочисленные выступы 150 сформированы в желобках боковых поверхностей 131, 133, сформированных на боковых поверхностях 116c, 116d участка тела корпуса 116. Каждый выступ 150 имеет форму V, причем оба конца 150a V-образно суженного выступа 150 располагаются на стороне передней оконечной части 116a участка тела корпуса 116, а центральный участок 150b выступа 150 смещается по направлению к стороне задней оконечной части 116b участка тела корпуса 116. Данные выступы 150 подпирают большой палец пользователя 301 и указательный палец 302, когда пользователь захватывает приводной шуруповерт 110. Большой палец пользователя 301 и указательный палец 302 зацепляются посредством данных выступов 150 и предохраняются от скольжения.
Как объяснялось выше, отбортованный участок 140, выступающий наружу, сформирован в верхней части заднего оконечного желобка 132. Посредством данной конфигурации верхний ободок 132e заднего оконечного желобка 132 также заметно выступает наружу. Как показано на Фиг. 15 и Фиг. 16, в заднем оконечном желобке 132 данный верхний ободок 132e заметно больше выступает из участка тела корпуса 116, чем выступает нижний конец 132f заднего оконечного желобка 132. Как показано на Фиг. 15, в одной части заднего оконечного желобка 132 нижний ободок 132f заднего оконечного желобка 132 очерчен не четко. Однако в заднем оконечном желобке 132 поверхность изогнута в вогнутой форме, а в участке ниже заднего оконечного желобка 132 поверхность изогнута в выпуклой форме. Следовательно, нижний ободок 132f заднего оконечного желобка 132 представляет собой точку перегиба, в которой меняется направление поверхности изгиба.
Как показано на Фиг. 17, верхний ободок 132e заднего оконечного желобка 132 заметно больше выступает из участка тела корпуса 116, чем выступают верхние ободки 131e, 133e желобков боковых поверхностей 131, 133. Более конкретно, верхний ободок 132e заднего оконечного желобка 132 заметно больше выступает по направлению к задней оконечной стороне участка тела корпуса 116 (то есть по направлению к центру заднего оконечного желобка 132). Посредством данной конфигурации глубина D заднего оконечного желобка 132 становится глубже по направлению к заднему концу участка тела корпуса 116 (то есть по направлению к промежуточному положению между одним концом 132a и другим концом 132b заднего оконечного желобка 132). В данной работе глубина D заднего оконечного желобка 132 представляет собой глубину от верхнего ободка 132e заднего оконечного желобка 132 до самого глубокого участка. Конкретно, является предпочтительным, чтобы на заднем конце участка тела корпуса 116 глубина D1 заднего оконечного желобка 132 составляла 6 миллиметров или больше и чтобы в позиции 140s, в которой отбортованный участок 140 наиболее выступает в боковых направлениях участка тела корпуса 116, глубина D2 заднего оконечного желобка 132 составляла 2 миллиметра или больше. В данном варианте осуществления глубина D1 на заднем конце участка тела корпуса 116 составляет 7 миллиметров, глубина D2 в позиции 140S наибольшего выступа отбортованного участка 140 в боковых направлениях участка тела корпуса 116 составляет 3 миллиметра, а глубина D заднего оконечного желобка 132 непрерывно уменьшается от позиции D1 к позиции D2.
В соответствии с описанной выше конструкцией заднего оконечного желобка 132, когда пользователь захватывает участок тела корпуса 116, как показано на Фиг. 13 и Фиг. 14, участок области кожи 306 между большим пальцем 301 и указательным пальцем 302 закрывается сверху отбортованным участком 140. Посредством данной конфигурации участок области кожи 306 между большим пальцем 301 и указательным пальцем 302 прочно помещается внутри заднего оконечного желобка 132. В пространственном положении захвата, показанном на Фиг. 13 и Фиг. 14, несмотря на то, что легко прикладывать силу, чтобы давить на приводной шуруповерт 110, когда приводной шуруповерт 110 необходимо поднимать вверх, пользователь чувствует, что масса приводного шуруповерта 110 становится больше. В данном случае, если область кожи участка 306 прочно помещается внутри заднего оконечного желобка 132, пользователь может чувствовать, что масса приводного шуруповерта 110 сравнительно распределяется, и может продолжать зажимать приводной шуруповерт 110 в течение долгого периода времени.
Как показано на Фиг. 17, в заднем оконечном желобке 132 предоставлен листовой материал 160, сформированный из эластомера. Листовой материал 160 является более гибким, чем материал корпуса 112, и имеет более высокое сопротивление трению, чем корпус 112.
В соответствии с данной конструкцией, когда пользователь помещает участок области кожи 306 между большим пальцем 301 и указательным пальцем 302 в задний оконечный желобок 132, участок области кожи 306 погружается в листовой материал 160 и участок области кожи 306 прочно помещается внутри заднего оконечного желобка 132.
Как объяснялось выше, даже в пространственном положении, в котором участок тела корпуса 116 приводного шуруповерта 110 данного варианта осуществления непосредственно захвачен (см. Фиг. 13 и Фиг. 14), пользователь может крепко захватить приводной шуруповерт 110. В соответствии с данной конфигурацией движения вытягивания приводного шуруповерта 110 вверх и движения поднимания приводного шуруповерта 110 могут быть выполнены без ощущения большой нагрузки. Пользователь может легко управлять приводным шуруповертом 110 данного варианта осуществления, а эффективность выполнения задачи может быть значительно повышена.
С помощью изложенного выше был подробно объяснен приводной шуруповерт 110 второго варианта осуществления; однако это представляет собой только примеры и никоим образом не ограничивает объем правовых притязаний формулы изобретения. Технология, описанная в рамках формулы изобретения, содержит различные модификации и изменения конкретного примера, описанного выше.
Технология, используемая в приводном шуруповерте второго варианта осуществления, может быть применена в различных других приводных инструментах. Преимущественные результаты технологии данного изобретения не теряются в зависимости от типа первичного двигателя приводного инструмента (электрического двигателя, двигателя на сжимаемых текучих средах, двигателя внутреннего сгорания) или от задачи применения приводного инструмента (вскрывание отверстий, затягивание винтов, отделка).
Конкретно, конструкция заднего оконечного желобка и отбортованного участка в приводном шуруповерте 110 второго варианта осуществления может соответственно быть применена в приводной дрели первого варианта осуществления.
Технические элементы, раскрытые в описании, или чертежи могут быть использованы отдельно или во всех типах комбинаций и не ограничены комбинациями, изложенными в формуле изобретения на момент подачи заявки. Более того, раскрытый здесь объект изобретения может быть использован для одновременного достижения множества целей или для достижения только одной цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕЙКОПЛАСТЫРНАЯ СТРУКТУРА ДЛЯ ЛЕЧЕНИЯ РАН, ВЫЗВАННЫХ ВРОСШИМИ НОГТЯМИ | 2015 |
|
RU2717937C2 |
| БОЙКОВОЕ УСТРОЙСТВО | 2015 |
|
RU2702181C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2009 |
|
RU2544971C2 |
| ИНСТРУМЕНТ ДЛЯ СВЕРЛЕНИЯ С ПЕРЕСТАВЛЯЕМЫМИ РЕЖУЩИМИ ПЛАСТИНАМИ | 1995 |
|
RU2147491C1 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2009 |
|
RU2509642C2 |
| МОДУЛЬНЫЙ СВЕРЛИЛЬНЫЙ ИНСТРУМЕНТ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2007 |
|
RU2446918C2 |
| ПАТРОН ДЛЯ ПЕРФОРАТОРА | 2007 |
|
RU2436667C2 |
| ХОЛОДИЛЬНЫЙ АППАРАТ, В ЧАСТНОСТИ, БЫТОВОЙ ХОЛОДИЛЬНЫЙ АППАРАТ | 2011 |
|
RU2537536C2 |
| НАПРАВИТЕЛЬ ИНСТРУМЕНТА | 2012 |
|
RU2605999C2 |
| ХИРУРГИЧЕСКАЯ ДРЕЛЬ | 2016 |
|
RU2686046C2 |
Изобретение относится к конструкции для захвата портативного приводного инструмента. Инструмент содержит корпус и двигатель, который вращает инструмент. Корпус содержит задний оконечный желобок и пару желобков боковых поверхностей. Задний оконечный желобок предназначен для помещения пользователем области кожи между большим пальцем и указательным пальцем. Задний оконечный желобок сформирован на задней оконечной поверхности корпуса, которая размещена на противоположной стороне от инструмента. Желобки боковых поверхностей предназначены для помещения пользователем большого пальца и указательного пальца. Желобки боковых поверхностей сформированы на обеих боковых поверхностях корпуса. По меньшей мере один из пары желобков боковых поверхностей включает участок с изменяющейся глубиной. Причем глубина по меньшей мере одного из пары желобков боковых поверхностей уменьшается по направлению к задней оконечной поверхности корпуса. В результате уменьшается усталость пользователя в процессе работы инструментом. 12 з.п. ф-лы, 17 ил.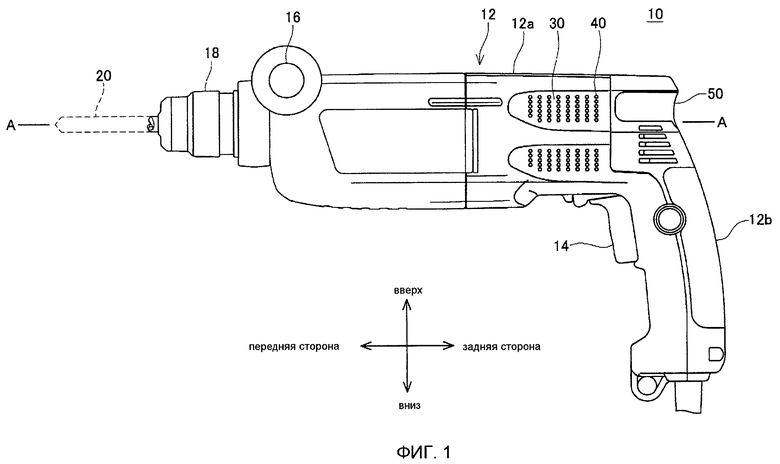
1. Портативный приводной инструмент, содержащий
двигатель, который вращает инструмент и
корпус, который вмещает в себя двигатель, причем корпус содержит задний оконечный желобок, в который пользователь может помещать его область кожи между его большим пальцем и указательным пальцем, сформированный на задней оконечной поверхности корпуса, которая размещена на противоположной стороне от инструмента, и пару желобков боковых поверхностей, в которые пользователь может помещать большой палец и указательный палец, сформированных на обеих боковых поверхностях корпуса, при этом по меньшей мере один из пары желобков боковых поверхностей включает участок с изменяющейся глубиной, причем глубина по меньшей мере одного из пары желобков боковых поверхностей уменьшается по направлению к задней оконечной поверхности корпуса.
2. Инструмент по п.1, в котором участок с изменяющейся глубиной сформирован в каждом из пары желобков боковых поверхностей.
3. Инструмент по п.1, в котором по меньшей мере один из пары желобков боковых поверхностей включает участок с изменяющейся глубиной и участок с постоянной глубиной, причем глубина участка с постоянной глубиной является, по существу, постоянной от участка с изменяющейся глубиной по направлению к стороне инструмента.
4. Инструмент по п.1, в котором по меньшей мере один выступ сформирован по меньшей мере в одном из пары желобков боковых поверхностей.
5. Инструмент по п.4, в котором по меньшей мере один выступ сформирован в пределах участка с изменяющейся глубиной.
6. Инструмент по п.4, в котором по меньшей мере один выступ изготовлен из материала более мягкого, чем материал корпуса.
7. Инструмент по п.4, в котором, по меньшей мере, один выступ имеет V-образную форму, сужающуюся по направлению к задней оконечной стороне корпуса от обоих оконечных участков V-образной формы к промежуточному участку V-образной формы.
8. Инструмент по п.1, в котором задний оконечный желобок становится глубже по направлению к заднему концу корпуса.
9. Инструмент по п.1, в котором участок верхнего ободка заднего оконечного желобка выступает больше, чем участок нижнего ободка заднего оконечного желобка.
10. Инструмент по п.1, в котором глубина заднего оконечного желобка на заднем конце корпуса равна 6 мм или более.
11. Инструмент по п.1, в котором отбортованный участок, выступающий из корпуса, сформирован в верхней части заднего оконечного желобка корпуса.
12. Инструмент по п.11, в котором отбортованный участок выступает больше по направлению к заднему концу корпуса.
13. Инструмент по п.1, в котором задний оконечный желобок и пара желобков боковых поверхностей сформированы в ряд.
| DE 7905217 U1, 23.05.1979 | |||
| JP 2001198856 A, 24.07.2001 | |||
| JP 2006123086 A, 18.05.2006 | |||
| ПРИСПОСОБЛЕНИЯ ДЛЯ УДЕРЖАНИЯ РАБОЧЕГО ОРГАНА | 1992 |
|
RU2027609C1 |

