Область техники, к которой относится изобретение
Изобретение относится к устройству, предназначенному для перемещения грузов, в частности к устройству, предназначенному для манипулирования и погрузки поддонов и грузовых контейнеров.
Предпосылки к созданию изобретения
Согласно существующему уровню техники различные рабочие машины, в особенности штабелеры, используются для разгрузки и загрузки грузовых контейнеров различными грузами, включая различные элементы, собранные на поддонах, платформах или транспортных платформах, так же как отдельные рулоны бумаги различных видов. Пример штабелера, у которого стрела с телескопическим управлением снабжена также вспомогательным соединением, описан в документе ЕР 0 410 082 А1. Другие примеры приведены в документах ЕР 0 415 608 А2 и US 4822237. Пример захватов или вил описан в документе GB 1552533.
Большие грузовые контейнеры обычно загружают таким образом, что рабочая машина с прикрепленными к ней устройствами и рабочими органами по меньшей мере частично входит в грузовой контейнер. Устройство подвижно соединяется с рабочей машиной, а рабочим органом обычно являются вилы. С вилами впереди рабочую машину вводят в грузовой контейнер, груз помещают на место, после чего рабочая машина выезжает обратно. Устройства и рабочие машины, предназначенные для загрузки контейнеров, имеют размеры, позволяющие им входить в грузовой контейнер. В частности, ширина рам устройств, предназначенных для загрузки контейнеров, и в особенности ширина вил, которые должны быть там помещены, ограничивается таким образом, чтобы они могли войти в контейнер с достаточным зазором, допускающим, например, раскачивание, ошибки при рулевом управлении или изменения в положении рабочей машины.
Кроме того, известны рабочие машины, которые оборудованы вилами и предназначены для манипулирования и транспортировки контейнеров. Размеры рабочих органов таких рабочих машин не предусматривают возможности укладки грузов в контейнеры.
Сущность изобретения
Целью настоящего изобретения является расширение возможностей использования применявшихся до сих пор устройств и рабочих машин с использованием их таким образом, чтобы загрузка и разгрузка контейнера, так же как манипулирование самим контейнером, были возможны с тем же устройством, которое является, в частности, регулируемой вилкой. Указанный признак обеспечивает также дополнительные области применения устройства, в частности, если устройство снабжено взаимозаменяемыми рабочими органами, и способствует улучшению производственного процесса, поскольку отпадает необходимость в использовании отдельных рабочих машин для манипулирования самим контейнером, или же не будет необходимости во взаимной замене рабочего органа другим органом, причем достигается снижение издержек, так же как и затрат времени.
Общая ширина рамы устройства согласно изобретению ограничивается так, что оно может использоваться для загрузки груза, помещенного, например, на поддоны, в контейнер. Устройство включает в себя двое вил, помещенных на регулируемом расстоянии между собой и имеющих общую ширину, которая меньше общей ширины рамы при манипулировании транспортными платформами. Вилы размещаются таким образом, чтобы приближаться друг к другу в такой степени, при которой они способны перемещать стандартные транспортные платформы, по меньшей мере со стороны их более длинного бока. С другой стороны, расстояние между вилами можно изменять, так что вилы позволяют перемещать стандартный контейнер, снабженный углублениями под вилку. При обработке контейнеров общая ширина вил больше общей ширины самой рамы. Особенностью изобретения является то, что конструкции, поддерживающие вилы, например различные каретки, по меньшей мере частично выдвигаются дальше бокового края рамы, причем эффективно используется вся ширина рамы.
Указанная разница в общей ширине рамы и выдвинутых вил или кареток позволяет укладывать грузы в контейнер с помощью достаточно узкого устройства. С другой стороны, указанная разница позволяет раздвигать вилы в диапазонах, достаточных для попадания в углубления под вилы с тем, чтобы обеспечить манипулирование всего контейнера. Перемещение вил или кареток оказывается, таким образом, достаточным для придания гибкости в использовании.
В патенте США № 4960357 описана вилка, соответствующая прежним техническим решениям, которая имеет два зубца вил, перемещающиеся в подъемной каретке. Подъемная каретка содержит горизонтальную нижнюю балку, передняя поверхность которой снабжена направляющей поверхностью, по которой катятся ролики, помещенные на зубце вил. Зубец вил прижимается к направляющей поверхности с помощью указанных роликов и под воздействием груза. Подъемная каретка содержит также горизонтальную верхнюю балку, верхняя поверхность которой снабжена направляющей поверхностью, по которой катятся ролики, помещенные на зубце вил. Задняя поверхность верхней балки также снабжена направляющей поверхностью, по которой катятся ролики, помещенные на зубце вил. Нагрузка на вилы, действующая в различных направлениях, прижимает ролики к направляющим поверхностям. Нижние ролики, и обычно также самые верхние ролики, помещаются с обеих сторон зубцов вил, что описано также в заявке WO 91/07345.
В устройстве согласно патенту США № 4960357 и заявке WO 91/07345 максимальная ширина раздвинутых вил всегда меньше максимальной ширины подъемной каретки, поддерживающей вилы, что ограничивает применение рабочего органа, таким образом, например, невозможно оказывается использовать углубления под вилы. Зубцы вил невозможно раздвинуть достаточно широко, поскольку в противном случае ролики опор выпадут с их направляющих поверхностей. С другой стороны, если общая максимальная ширина зубцов вил увеличена путем расширения рамы подъемной каретки, рабочий орган не сможет войти в дверной проем контейнера. В документе NL 9200588 описано устройство для обработки поддонов, однако при таком устройстве нет возможности максимально сдвинуть или раздвинуть зубцы вил с помощью исключительно исполнительного механизма. Зубцы вил должны также перемещаться вручную, что замедляет работу и небезопасно. Кроме того, в устройстве используется подшипник скольжения.
Допустимые габаритные размеры грузовых контейнеров установлены, например, в стандарте ISO 668, в котором длина 40-, 30-, 20- и 10-футовых контейнеров установлена равной 12192 мм (40 футов), 9125 мм (29 футов 11¼ дюйма), 6058 мм (19 футов 10½ дюйма) или 2991 мм (9 футов ¾ дюйма), ширина равна 9438 мм (8 футов) и высота равна 2438 мм (8 футов) (альтернативно 2591 мм 8 футов 6 дюймов) или меньше 2438 мм). Нормативное значение общего веса равно 30480 кг, 25400 кг, 24000 кг и 10160 кг соответственно.
Наименьшие внутренние размеры контейнера составляют 11998 мм, 8931 мм, 5867 мм или 2802 мм по длине и 2330 мм по ширине. Наименьшие размеры дверного проема контейнера составляют 2134 мм или 2261 мм по высоте и 2286 мм по ширине. С точки зрения загрузки контейнера наиболее важными размерами являются ширина дверного проема, равная как минимум 2286 мм, и ширина внутренней части, равная как минимум 2330 мм.
Для удобства перемещения контейнер часто оборудуют углублениями под вилы (подъемными углублениями под вилы), которые размещаются парами с длинной стороны контейнера, в нижней части контейнера. В качестве примера углубления под вилы имеют ширину 360 мм, высоту 115 мм при расстоянии между центрами углублений под вилы, равном 2050 мм, причем расстояние между центрами может колебаться в пределах 50 мм. В другом примере углубления под вилы имеют ширину 14 дюймов (355,6 мм), их высота равна 4½ дюймам (114,3 мм) и расстояние между центрами равно 81 дюйму (2057,4 мм). Контейнер может также иметь две пары углублений под вилы, причем самая внутренняя пара углублений под вилы предназначена для обработки пустого контейнера. В одном примере углубления под вилы имеют ширину 310 мм, высоту 115 мм и расстояние между центрами углублений под вилы, равное 860 мм.
Устройство используют также для обработки поддонов, которые также стандартизированы. Наружные размеры так называемого поддона EUR равны 1200×800×144 мм. С более длинной стороны поддона проемы в поддоне для вил вилочного подъемника имеют размеры приблизительно 378 мм × 100 мм при расстоянии между центрами около 533 мм, а на более короткой стороне поддона размеры составляют приблизительно 223×100 мм при расстоянии между центрами около 378 мм.
В ходе разработки изобретения нами обнаружено, что ограничения, связанные с существующими техническими решениями, можно устранить, позволив зубцам вил простираться частично над наружным краем соответствующей направляющей поверхности или направляющих поверхностей, не нарушая работы подшипников. В указанном крайнем положении давление на поверхность между зубцами вил и направляющей поверхностью и реакция опоры, создаваемая направляющей поверхностью, все еще достаточны для обработки контейнеров. Соответствующая идея срабатывает также и в том случае, когда зубец вил переносится кареткой, которая одновременно движется вдоль направляющей поверхности в подъемной каретке рабочего органа и соединяет вилы с подъемной кареткой. Между передаточной кареткой и подъемной кареткой помещен подшипник.
В конкретном варианте реализации изобретения подшипник скольжения помещен между кареткой и направляющей поверхностью таким образом, что подшипник скольжения не выступает над наружным краем передаточной каретки или вилки, что имеет место, например, при использовании подшипника качения. Подшипник ограничен, например, будучи уже ширины каретки или вил, когда подшипник помещается между этими конструкциями. Согласно изобретению, например, подшипники скольжения необязательно определяют или ограничивают суммарную ширину рабочего органа или необязательно ограничивают общую ширину раздвинутых вил или раздвинутых кареток. Согласно изобретению вилы могут быть раздвинуты до достаточной ширины, например, для обработки контейнера. Подшипник в максимальной степени использует ширину направляющей поверхности и подъемной каретки, когда направляющая поверхность доходит до края подъемной каретки.
Согласно изобретению можно раздвинуть зубцы вил на ширину, соответствующую ширине поддонов, так же как и ширине, соответствующей углублениям под вилы грузового контейнера, исключительно с помощью исполнительных механизмов устройства, причем отпадает необходимость в ручном регулировании зубцов вил.
В конкретном варианте реализации изобретения подшипник скольжения, созданный с помощью листа скольжения, также помещают эксцентрично относительно зубца вил и каретки, со стороны внутреннего края зубца вил и передаточной каретки. Длина и общая площадь поверхности подшипника скольжения являются достаточными для поддержания давления на поверхность на достаточно низком уровне для того, чтобы сохранить погрузочную мощность устройства и сохранить функциональные возможности подшипника. Давление на поверхность устанавливается для той секции подшипника скольжения, которая зажата, например, между кареткой и направляющей поверхностью. В представленном варианте реализации изобретения каретка, т.е. передаточная каретка, несущая рабочий орган, и зубец вил разделены, делая возможным удаление или замену зубца вил без разборки конструкции или съема передаточной каретки с устройства или подъемной каретки.
Продолжение перемещения зубца вил или передаточной каретки дальше подъемной каретки ограничено таким образом, что раскачивание зубца вил не должно повлиять на функционирование. Однако ширина зубцов вил и передаточной каретки ограничена таким образом, что ширину вил можно уменьшить для того, чтобы они подходили для обработки поддона.
Важным преимуществом изобретения является гибкое использование устройства, при котором оно подходит для загрузки, а также для обработки контейнеров.
Краткое описание чертежей
Ниже изобретение будет описано более подробно со ссылкой на прилагаемые чертежи, на которых:
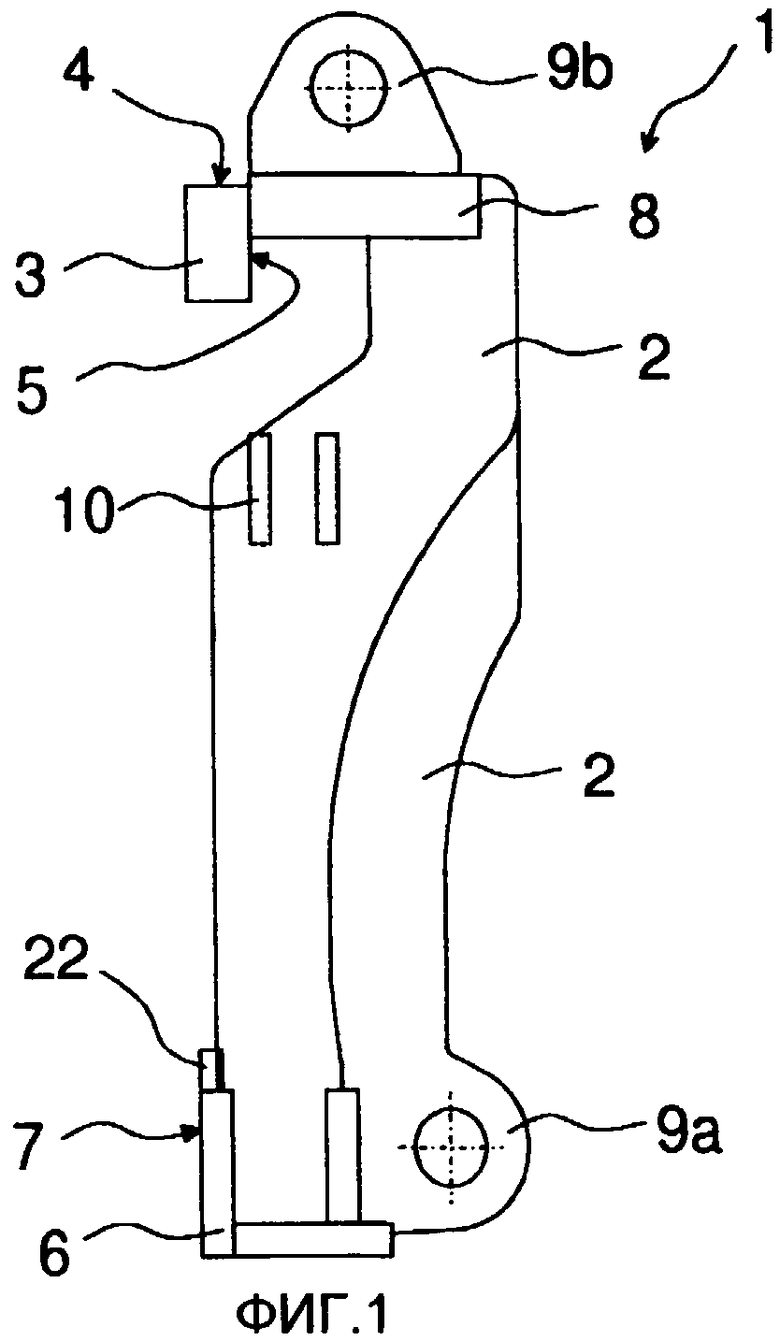
на фиг.1 показан вид сбоку подъемной каретки;
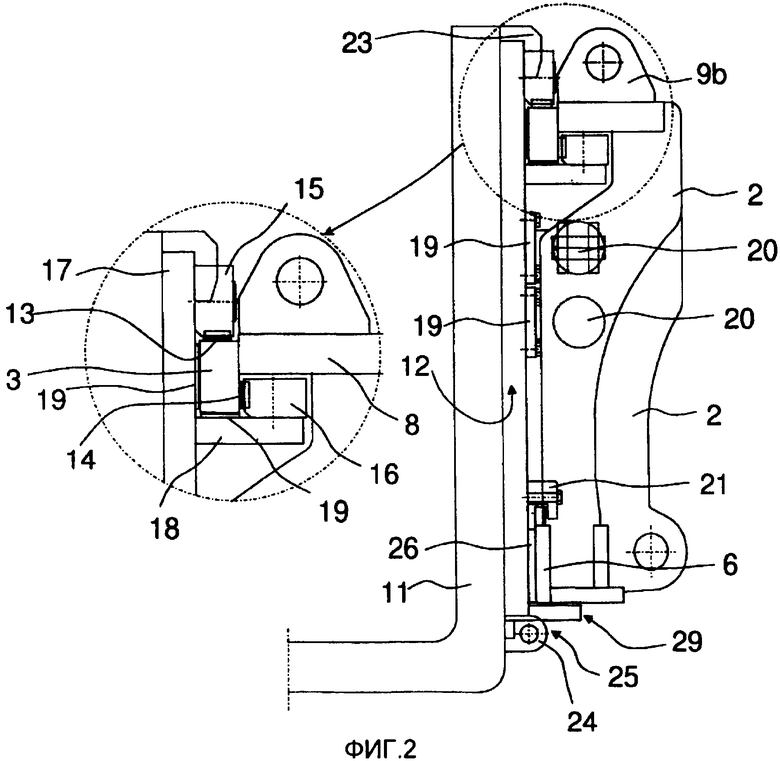
на фиг.2 показан вид сбоку подъемной каретки, передаточной каретки и зубца вил;
на фиг.3 показан вид сзади передаточной каретки;
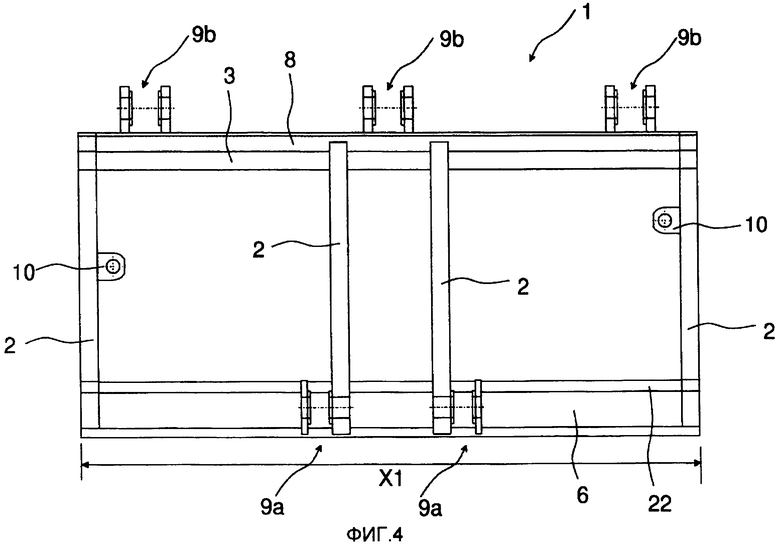
на фиг.4 показан вид сзади подъемной каретки; и
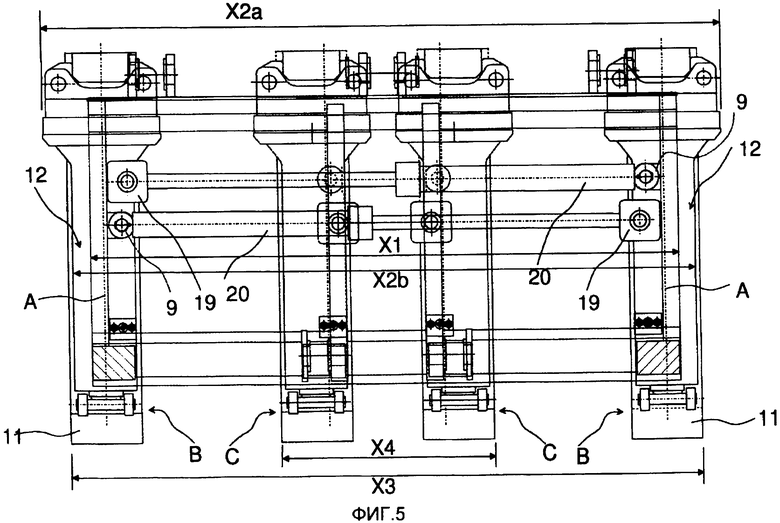
на фиг.5 показан вид сзади различных положений передаточных кареток в зависимости от подъемной каретки.
Подробное описание изобретения
На фиг.1 показан вид сбоку подъемной каретки 1 устройства. Подъемная каретка 1 состоит в общем из четырех частей 2 рамы, которые соединяются первой верхней горизонтальной балкой 3, верхняя поверхность которой снабжена первой направляющей поверхностью 4, являющейся по существу горизонтальной и обращенной в этом примере вверх, так что она образует горизонтальную поверхность. На фиг.1 показана часть 2 рамы, находящаяся на конце подъемной каретки 1 и часть 2 рамы, находящаяся возле середины подъемной каретки 1. Эта часть 2 рамы снабжена также проушиной 9а, с которой должен быть соединен исполнительный механизм (не показан на фигуре), предназначенный для управления наклоном устройства вперед или назад. Исполнительным механизмом обычно является гидравлический цилиндр, который соединяется также с конструкцией балки, с которой устройство также соединяется посредством соединительного узла. Направляющая поверхность 4 предназначена для поддержки конструкций, соединенных с подъемной кареткой 1, и грузов, которые перемещают устройство. На задней поверхности балки 3 имеется вторая направляющая поверхность 5, которая является, по существу, горизонтальной и в этом примере обращена назад, где она образует вертикальную поверхность. Назначением направляющей поверхности 5 является предотвращение выпадения вперед конструкций и грузов, соединенных с подъемной кареткой 1 и одновременная поддержка их направляющей поверхностью 4. В дополнение к перпендикулярному положению, направляющие поверхности могут занимать наклонное положение относительно друг друга. Части 2 рамы соединяются также второй нижней горизонтальной 6, передняя поверхность которой снабжена третьей направляющей поверхностью 7, которая является вертикальной. Назначением направляющей поверхности 7 является поддержка подвижных конструкций, нагруженных весом груза, на подъемной каретке 1. В случае необходимости части 2 рамы соединяются также другими конструкциями, которые укрепляют подъемную каретку 1, ее соединительные части, или имеют другое назначение. Например, подъемная каретка 1 имеет третью горизонтальную балку 8, перед которой прикреплена балка 3, и которая снабжена тремя проушинами 9b, которые образуют часть шарниров, посредством которых устройство подвижно соединяется с конструкцией балки рабочей машины. Внутренняя поверхность самой наружной части 2 рамы снабжена также проушиной 10, с которой соединен исполнительный механизм 20, предназначенный для регулирования расстояния между зубцами 11 вил.
На фиг.2 показаны и подъемная каретка 1, и передаточная каретка 12, поддерживающие зубец 11 вил. Передаточная каретка 12 установлена с передней стороны частей 2 рамы, а вилы, в свою очередь, подвешиваются с передней стороны передаточной каретки 12. Устройство содержит всего две передаточные каретки 12 для двух зубцов 11 вил. Зубцы 11 имеют L-образную форму, будучи известны как таковые, а грузы помещают на горизонтальной части вил 12. Зубцы вил 11 входят также настолько глубоко в углубления под вилы контейнера, что вертикальная часть вил 11 оказывается рядом с боковой стенкой контейнера.
Увеличенный участок фиг.2 показывает более подробно подшипник устройства и, в частности, функционирование подшипника скольжения. Рама 17 передаточной каретки 12 является вертикальной балкой, верхний конец которой со стороны подъемной каретки 1, снабжен первым гнездом 15 подшипника, причем первый подшипник скольжения 13 прикреплен к его нижней поверхности. Подшипник скольжения 13 помещен в выемку в гнезде 15 подшипника. Подшипник скольжения 13 размещается напротив направляющей поверхности 4. Верхний конец рамы 17, со стороны подъемной каретки 1, снабжен также вторым гнездом 16 подшипника, и второй подшипник скольжения прикреплен к его передней поверхности. Подшипник скольжения 14 помещен в выемку в гнезде 16 подшипника. Подшипник скольжения 14 размещается напротив направляющей поверхности 5. Гнездо 16 подшипника прикреплено к раме 17 посредством кронштейна 18, помещенного под балкой 3. Частям 2 рамы придана такая форма, что кронштейн 18 и гнездо 16 подшипника могут проходить мимо частей 2 рамы и двигаться по всей длине направляющих поверхностей 4 и 5. Передняя поверхность балки 3, обращенная к раме 17, и, в случае необходимости, также нижняя поверхность, обращенная к кронштейну 18, могут быть оборудованы подшипниками скольжения 19, но нагрузка в этих точках значительно меньше нагрузки на подшипники скольжения 13 и 14, и они обычно имеют небольшой зазор.
Третий подшипник скольжения 26 помещается в нижней части рамы 17, напротив направляющей поверхности 7, для того чтобы скользить вдоль направляющей поверхности 7. Подшипник скольжения 26 может также быть прикреплен к раме 17 с помощью опоры или отдельного кожуха, образующего часть рамы 17. Подшипник скольжения 26 является горизонтальным, и в этом примере он обращен вперед, образуя вертикальную поверхность. Его ориентация может также быть слегка наклонной.
Кроме того, к раме 17 крепятся и другие конструкции, исходя из функциональных возможностей устройства. Каждая передаточная каретка 12 снабжена проушиной 19, с которой соединяется исполнительный механизм 20, предназначенный для перемещения передаточной каретки 12. Исполнительный механизм 20 соединяется также с подъемной кареткой 1. К раме 17 прикреплен также задерживающий выступ 21, загнутый за удерживающую балку 22. Задерживающий выступ 21 предназначен для того, чтобы не допустить отход на значительное расстояние рамы 17 и, одновременно, передаточной каретки 12, зубца 11 и подшипника скольжения 26 от балки 6 и, одновременно, от подъемной каретки 1, вызванного, например, раскачиванием. Горизонтальная удерживающая балка 22 прикреплена сверху к балке 6 с передней стороны частей 2 рамы. На верхнем конце зубца 11 помещен ограничительный выступ 23, который должен помещаться сверху на раму 17 для того, чтобы не допустить извлечения зубца 11 из рамы 17. В нижней части зубца 11 предусмотрены также запорные средства 24, с помощью которых зубец 11 зафиксирован на аналогичном средстве 25 в нижней части рамы 17 с целью не допустить подъема ограничительного выступа 23 и зубца 11 и извлечения зубца 11 из рамы 17. Благодаря тому, что зубец 11 и передаточная каретка 12 являются раздельными элементами, существует возможность замены зубца в передаточной каретке 12 на другой вилочный зубец или на совершенно другой рабочий орган, например захват для обработки грузов.
Передаточная каретка 12 и зубец 11 могут также соединяться друг с другом другим путем, например болтами. Кроме того, передаточная каретка 12 и зубец могут формировать цельную, например сварную, конструкцию, в составе которой они заменяются совместно в случае необходимости замены зубцов 11, движущихся в подъемной каретке 1, или вил. Вариант реализации с применением вил является наиболее предпочтительным в отношении обработки контейнеров, но представленная подъемная каретка 1 и передаточная каретка 12 могут также использоваться в сочетании с другими средствами, рабочими органами и конструкциями, предназначенными для обработки грузов. Даже тогда с представленной передаточной кареткой 12 можно добиться большого диапазона перемещения, превышающего ширину передаточной каретки 1 и направляющих поверхностей. Передаточная каретка 12 и относящиеся к ней конструкции могут также представлять собой однородный или интегрированный структурный узел.
На фиг.3 показан вид сзади передаточной каретки 12 без зубца 11. Подъемная каретка 1 очерчивается на фиг.3 пунктиром. Зубец 11 показан на фигуре только в своей горизонтальной части. Передаточная каретка 12, показанная на фиг.2, является левосторонней передаточной кареткой 12, которая видна с задней стороны устройства и подъемной каретки 1, на фиг.3 соответствующим образом показана правосторонняя передаточная каретка 12, однако передаточные каретки являются зеркальным отражением друг друга, в особенности в отношении вида подшипников скольжения 13, 14 и 26.
На фиг.3 можно видеть, что подшипник скольжения 13 в особенности использует направляющую поверхность 4, помещенную против него (фиг.1), в максимальной степени, когда поверхность скольжения 4 тянется от одного края подъемной каретки 1 до противоположного края. Тот же принцип в одинаковой степени применяется к подшипнику скольжения 14. Допускается даже выдвижение подшипника скольжения 13 несколько дальше края балки 3, если только поверхностное давление в оставшейся части является достаточно низким. Поверхностное давление вызывается нагрузкой и зависит от площади поверхности подшипника скольжения. Материал и лист скольжения известны как таковые, полностью доступны и выбраны для использования изобретения.
На фиг.3 можно видеть, что подшипник скольжения 13, так же как подшипник скольжения 14, помещаются эксцентрично относительно центральной линии А передаточной каретки 12, которая в этом случае сливается с центральной линией зубца 11 (фиг.2). В результате можно переместить передаточную каретку 12 и зубец 11 дальше подъемной каретки 1 в поперечном направлении (на фиг.3 вправо), причем зубец 11 и/или передаточная каретка 12 будут определять общую ширину Х2 устройства, которая больше максимальной общей ширины Х1 подъемной каретки 1, соответствуя таким образом длине направляющей поверхности 4 и, в представленном варианте реализации, также длине направляющих поверхностей 5 и 7. Верхняя часть рамы 17 с ее подшипниками шире, чем остальная рама 17, но везде также наружный край рамы 17 будет простираться дальше подъемной каретки 1, обеспечивая в результате максимальную общую ширину X2b, когда вилка находится в положении В (фиг.5). В этом случае общая ширина X1 также меньше общей ширины X2b. Соответствующим образом подшипник скольжения 26 также помещают эксцентрично, причем подшипники скольжения 13, 14 и 26 помещают ближе к внутреннему краю передаточной каретки 12, то есть смещают ближе ко второй передаточной каретке 12 и центральной части подъемной каретки 1. Эта часть передаточной каретки, до которой подшипник скольжения 13 не доходит, может таким образом перемещаться дальше от направляющей поверхности 4. Однако центральная линия А зубца 11 и передаточной каретки 12 помещается над подъемной кареткой 1, которая видна спереди, также при крайнем положении вил в позиции В.
Достаточная поддержка передаточной каретки 12 против ненужного раскачивания обеспечивается с помощью ограничительного средства 29, прикрепленного к нижней части рамы 17 и помещенного под балкой 6 (фиг.2). Ограничительный выступ 21 также прикреплен к раме 17 эксцентрично, так что он помещается внутри самой внешней части 2 рамы. В крайнем положении В передаточной каретки 12 ограничительный выступ 21 помещается рядом с частью 2 рамы и также используется как ограничитель в случае поломки исполнительного механизма 21, двигающего передаточную каретку 12.
В примере по фиг.3 зубец 11 также отходит дальше подъемной каретки в поперечном направлении, когда максимальная общая ширина Х3 разведенных вил, в частности их зубцов 11, больше общей ширины Х1. Общая ширина Х3 является ключевой, например, при обработке контейнера с его углублениями под вилы. Общая ширина Х1, в свою очередь, важна исходя из узкого дверного проема контейнера, так чтобы можно было производить загрузку контейнера. Общая ширина Х4 суженных вил (фиг.5), в свою очередь, имеет ключевое значение при обработке одиночных грузов, предназначенных к загрузке. Размеры устройства подобраны таким образом, чтобы и перемещение контейнера, и загрузка контейнера грузами были бы возможны с помощью одного и того же устройства.
На фиг.4 показан вид сзади подъемной каретки 1. Части 2 рамы снабжены также проушинами 10 для исполнительного механизма 20. Назначением исполнительного механизма 20 (фиг.5) является перемещение передаточной каретки 12, и он соединяется с проушиной 10 передаточной каретки 12. Исполнительным механизмом 20 обычно является гидравлический цилиндр, соединенный со схемой управления рабочей машины, которая используется также для управления исполнительными механизмами (не показаны на фигуре), прикрепленными к проушинам 9а. Возможно также прикрепление к проушинам 9а такой конструкции балки, которая наклоняется исполнительными механизмами, причем исполнительные механизмы не соединяются непосредственно с проушинами 9а. В результате указанная конструкция соединяется с проушинами 9а. Три проушины 9b предназначены для соединения устройства, т.е. подъемной каретки 1, с балкой рабочей машины. Проушины 9b образуют три соединительные точки, причем конструкция становится достаточно жесткой. Как показано на фиг.5, исполнительные механизмы помещаются поверх друг друга в горизонтальном направлении и выступают между самыми крайними частями 2 рамы. Исполнительные механизмы 20 проходят две центральные части 2 рамы.
На фиг.5 проиллюстрированы также различные крайние положения двух передаточных кареток 12 и одновременно зубцов 11. В крайнем расширенном положении В передаточных кареток 12 общая ширина зубцов 11 равна Х3. Суженное положение С передаточных кареток 12 с общей шириной Х4 проиллюстрировано очерчиванием передаточных кареток 12 пунктирной линией. Исполнительные механизмы 20 перемещают также передаточные каретки 12 и, одновременно, зубцы 11 в нужное положение между шириной Х3 и шириной Х4. Соотношение между общей шириной Х2а, X2b и Х3 зубцов 11 или передаточных кареток 12 и общей шириной Х1 подъемной каретки 1 должно изучаться в первую очередь на подшипнике 13, но также и на подшипнике 14 и/или подшипнике 26, поскольку в этих точках подъемная каретка 1 и передаточная каретка 12 опираются друг на друга.
Что касается размеров, то общая ширина Х1 подъемной каретки 1 составляет приблизительно 2150-2050 мм, предпочтительно 2100 мм, расстояние между центрами Z зубцов вил 11 при расширенном положении В составляет приблизительно 1950-2050 мм, предпочтительно 2000 мм и в суженном положении приблизительно 460-560 мм, предпочтительно 510 мм. Следует отметить, что передаточная каретка 12 выступает приблизительно на 49-69 мм, предпочтительно на 59 мм наружу относительно подъемной каретки 1. Соответствующим образом зубец 11 выступает приблизительно на 64-84 мм, предпочтительно на 74 мм наружу относительно подъемной каретки 1. Ширина зубца 11 предпочтительно равна 250 мм, а ширина нижней части передаточной каретки составляет около 220 мм.
Изобретение не ограничивается исключительно примерами, рассмотренными или представленными выше, но может варьироваться согласно прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВАЯ КАРЕТКА ГРУЗОПОДЪЕМНИКА ПОГРУЗЧИКА | 2024 |
|
RU2828413C1 |
| КАРЕТКА ВИЛ ВИЛОЧНОГО ПОГРУЗЧИКА | 2010 |
|
RU2533627C2 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| СКЛАДНОЙ КОНТЕЙНЕР(ВАРИАНТЫ) | 2009 |
|
RU2530866C2 |
| СТОЛ ПЕРЕГРУЗОЧНЫЙ | 2022 |
|
RU2791485C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМОЙ В ЗАВИСИМОСТИ ОТ ПОЛОЖЕНИЯ ЦЕНТРА МАСС ГРУЗА ТОЧКОЙ ПОДВЕСА | 2007 |
|
RU2344986C1 |
| СТОЛ ПЕРЕГРУЗОЧНЫЙ | 2019 |
|
RU2737114C1 |
| СТОЛ ПЕРЕГРУЗОЧНЫЙ | 2018 |
|
RU2695863C1 |
| СПОСОБ ПЕРЕГРУЗКИ ГРУЗОВ И СООТВЕТСТВУЮЩАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2005 |
|
RU2374107C2 |
| БОЛЬШЕГРУЗНЫЙ КОНТЕЙНЕР | 1996 |
|
RU2089481C1 |
Устройство для перемещения грузов содержит подъемную каретку, имеющую общую ширину, которая меньше дверного проема загружаемого контейнера, направляющую поверхность, которая проходит по всей ширине подъемной каретки, два зубца вил, которые могут двигаться, опираясь на направляющую поверхность. Зубцы вил имеют суженное положение для перемещения грузов, при котором общая ширина зубцов меньше общей ширины подъемной каретки, и два подшипника для перемещения зубцов, причем каждый подшипник помещен между каждым зубцом и направляющей поверхностью. Зубцы вил имеют также расширенное положение для обработки контейнеров и для сопряжения с углублениями под вилы на контейнере, причем общая ширина зубцов больше общей ширины подъемной каретки. В другом примере предусмотрены две передаточных каретки, причем каждая из них соединена с подъемной кареткой и может двигаться, опираясь на направляющую поверхность. Каждый подшипник является листом скольжения, прикрепленным к зубцу вил эксцентрично относительно центральной линии А зубца вил, и смещен к центральной части подъемной каретки. Изобретение обеспечивает повышение удобства эксплуатации устройства. 2 н. и 16 з.п. ф-лы, 5 ил.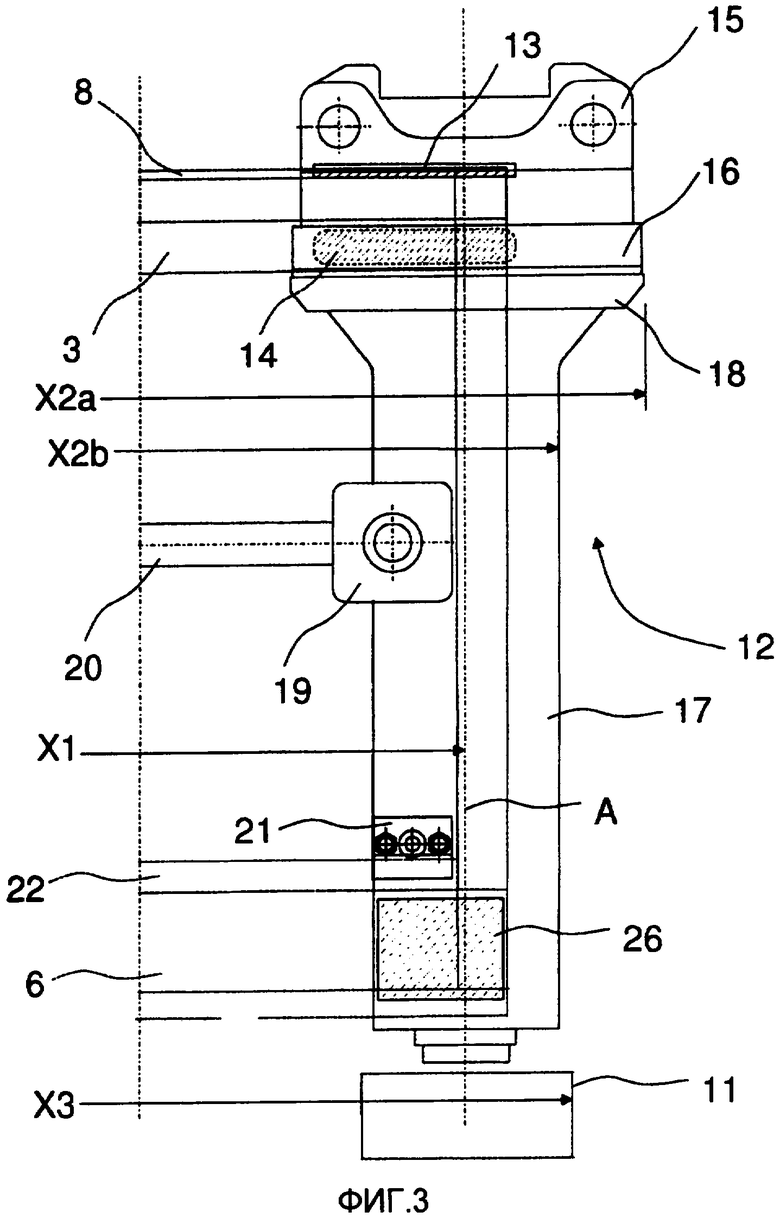
1. Устройство для перемещения грузов, содержащее:
- подъемную каретку, имеющую общую ширину;
первую направляющую поверхность, которая является, по существу, горизонтальной и проходит по всей ширине подъемной каретки;
- два зубца вил, которые соединяются с подъемной кареткой и которые могут двигаться в подъемной каретке, опираясь на первую направляющую поверхность;
два исполнительных механизма, соединенные с подъемной кареткой, с помощью которых зубцы вил могут перемещаться до, по меньшей мере, суженного положения с целью обработки поддонов, когда общая ширина зубцов вил меньше общей ширины подъемной каретки, и до, по меньшей мере, расширенного положения с целью перемещения грузовых контейнеров, когда общая ширина зубцов вил больше общей ширины подъемной каретки; и
- два подшипника для перемещения зубцов вил, причем каждый подшипник помещен между каждым зубцом вил и первой направляющей поверхностью,
- при этом каждый подшипник является листом скольжения, прикрепленным к зубцу вил эксцентрично относительно центральной линии А зубца вил, и смещен к центральной части подъемной каретки.
2. Устройство по п.1, в котором общая ширина подъемной каретки составляет меньше 2286 мм; расстояние между центральными линиями А зубцов в суженном положении составляет от 460 до 560 мм; причем расстояние между центральными линиями А зубцов вил в выдвинутом положении составляет приблизительно 1950-2050 мм, и общая ширина подъемной каретки составляет от 2150-2050 мм.
3. Устройство по п.2, в котором общая ширина подъемной каретки составляет 2100 мм, расстояние между центральными линиями А зубцов вил в выдвинутом положении составляет 2000 мм, и в суженном положении - 510 мм.
4. Устройство по п.1, содержащее две передаточные каретки, посредством которых каждый зубец вил соединяется с подъемной кареткой, при этом каждый подшипник помещен между каждой подъемной кареткой и первой направляющей поверхностью, и в расширенном положении передаточные каретки имеют общую ширину, которая больше общей ширины подъемной каретки.
5. Устройство по п.4, в котором ширина передаточной каретки составляет приблизительно 205-235 мм, предпочтительно 220 мм, и продолжение передаточной каретки над указанной направляющей поверхностью в расширенном положении вил составляет приблизительно 54-64 мм, предпочтительно 59 мм.
6. Устройство по п.4 или 5, в котором лист скольжения размещен эксцентрично также относительно центральной линии А передаточной каретки.
7. Устройство по п.1, в котором общая ширина зубцов вил в расширенном положении больше общей ширины подъемной каретки, а расстояние между центральными линиями зубцов вил меньше общей ширины подъемной каретки.
8. Устройство по п.1, в котором исполнительный механизм содержит гидравлический цилиндр.
9. Устройство по п.1, в котором подъемная каретка содержит три проушины, прикрепленные к подъемной каретке, посредством которых подъемная каретка подвешивается к балке рабочей машины так, что подъемная каретка может поворачиваться относительно горизонтальной оси вращения.
10. Устройство по п.1, в котором подъемная каретка содержит также, по существу, горизонтальную вторую направляющую поверхность, к которой прижаты зубцы вил, а также второй подшипник между второй направляющей поверхностью и зубцами вил.
11. Устройство по п.10, в котором второй подшипник является листом скольжения, помещенным эксцентрично относительно центральной линии А зубца вил.
12. Устройство по п.1, которое содержит также, по существу, горизонтальную третью направляющую поверхность, к которой прижаты зубцы вил, а также третий подшипник между третьей направляющей поверхностью и зубцами вил.
13. Устройство по п.12, в котором третий подшипник является листом скольжения, помещенным эксцентрично относительно центральной линии А зубца вил.
14. Устройство по п.1, в котором каждый зубец вилки содержит также ограничительный выступ, перемещающийся по подъемной каретке и препятствующий извлечению зубцов вил из подъемной каретки.
15. Устройство по п.9, в котором рабочей машиной является штабелер.
16. Устройство для перемещения грузов, содержащее:
- подъемную каретку, имеющую общую ширину;
- первую направляющую поверхность, которая является, по существу, горизонтальной и проходит по всей ширине подъемной каретки;
- две передаточных каретки, которые соединены с подъемной кареткой и которые могут двигаться в подъемной каретке, опираясь на первую направляющую поверхность;
- два исполнительных механизма, соединенные с подъемной кареткой, с помощью которых зубцы вил могут перемещаться до, по меньшей мере, суженного положения, когда общая ширина зубцов вил меньше общей ширины подъемной каретки, и до, по меньшей мере, расширенного положения, когда общая ширина зубцов вил больше общей ширины подъемной каретки; и
- два подшипника для перемещения передаточных кареток, причем каждый подшипник является листом скольжения, прикрепленным к передаточной каретке, помещенным между передаточной кареткой и первой направляющей поверхностью, при этом лист скольжения расположен эксцентрично относительно центральной линии А передаточной каретки и смещен по направлению к центральной части подъемной каретки.
17. Устройство по п.16, в котором подъемная каретка содержит также, по существу горизонтальную, третью направляющую поверхность, к которой прижаты передаточные каретки, и подшипник между третьей направляющей поверхностью и каждой передаточной кареткой, причем указанный подшипник является листом скольжения, прикрепленным к передаточной каретке и расположенным эксцентрично относительно центральной линии А передаточной каретки и смещен к центральной части подъемной каретки.
18. Устройство по п.16 или 17, в котором подъемная каретка содержит также, по существу, горизонтальную вторую направляющую поверхность, к которой прижаты передаточные каретки, и подшипник между второй направляющей поверхностью и каждой передаточной кареткой, причем указанный подшипник является листом скольжения, прикрепленным к передаточной каретке и расположенным эксцентрично относительно передаточной каретки и смещен по направлению к центральной части подъемной каретки.
| NL 9200588 A, 18.10.1993 | |||
| Пневматический переносной костер | 1980 |
|
SU949192A2 |
| СПОСОБ ЗАГРУЗКИ И РАЗГРУЗКИ КОНТЕЙНЕРОВ, ПЕРЕВОЗИМЫХ ЖЕЛЕЗНОДОРОЖНЫМИ ПЛАТФОРМАМИ | 1998 |
|
RU2127703C1 |
| КОМАНДА СДВИГА И ДЕЛЕНИЯ ДЕСЯТИЧНОГО ЧИСЛА | 2017 |
|
RU2726147C1 |
| US 3018011 A, 23.01.1962 | |||
| JP 2000327290, 28.11.2000. | |||

