Изобретение относится к области навигационных измерений, а более конкретно к измерениям с использованием астрономических средств.
Известен способ автоматического измерения координат места, времени, путевой скорости, текущих углов пространственной ориентации (курс, тангаж, крен), реализованный в радионавигационной аппаратуре «Бриз-КМ-РНК», являющийся аналогом. Радионавигационная аппаратура «Бриз-КМ-РНК» предназначена для оснащения объектов военно-морского флота и разработана Конструкторским бюро навигационных систем ЗАО «КБ НАВИС» [Рекламный проспект. Угломерная навигационная аппаратура ГЛОНАСС/GPS (+SBAS), ЗАО «КБ НАВИС»]. Она позволяет определять указанные координаты в движении, на стоянке и при подготовке стрельбы передвижной техники артиллерийских (ракетных) формирований по сигналам космических навигационных систем ГЛОНАСС и GPS и их функциональных дополнений. В состав аппаратуры «Бриз-КМ-РНК» входят три антенны СС201П, три усилителя МШ-РНБ, блок навигационный угломерный, блок индикации и управления, адаптер сетевой, комплект кабелей. Данная аппаратура используется на кораблях и имеет значительную массу (16-18 кг) и габариты, что является неприемлемым для размещения ее на носимом противотанковом ракетном комплексе.
Прототипом предлагаемого способа является способ ориентирования орудия, описанный в материалах докладов «Техника XXI века глазами молодых ученых и специалистов» [«Техника XXI века глазами молодых ученых и специалистов», Издательство ТулГУ, Тула, 2009 г., стр.252]. Способ ориентирования реализуется устройством ориентирования, описанным в патенте [Патент на промышленный образец №62445 «Пусковая установка противотанкового ракетного комплекса «Метис-М»», зарегистрированный в государственном реестре промышленных образцов Российской Федерации 16 апреля 2007 г.]. Данный способ включает последовательные установку измерителя в виде магнитометра, установленного на кронштейне выше крайней точки орудия не менее 60 см и направленного вдоль оси наведения орудия, блока расчета и индикации на орудие, калибровку измерителя, замер данных измерителя, расчет в блоке расчета и индикации текущих значений угла азимута и угла места, индикацию текущих значений угла азимута и угла места, разворот орудия до требуемых значений углов наведения по азимуту и месту.
Разворот орудия производят путем обеспечения равенства текущих и требуемых значений углов. Требуемые значения углов азимута и места сообщают оператору орудия до наведения и он их сохраняет в памяти или в виде записи. Для определения местонахождения орудия используется спутниковая навигационная система с одной антенной.
Недостатками прототипа являются следующие факторы.
Во-первых, зависимость точности расчета значений углов азимута от изменений магнитной обстановки на местности, например, на точность ориентирования орудия оказывают влияние металлические части обмундирования солдат. Они в значительной мере изменяют направление магнитного поля Земли вблизи орудия.
Во-вторых, необходимость производить трудоемкую калибровку магнитометра, что увеличивает время перевода пусковой установки из походного положения в боевое.
В-третьих, сниженные маскировочные качества орудия, вследствие необходимости выступания магнитометра над аппаратурным блоком пусковой установки не менее чем на 60 см.
Задачей изобретения являются возможность ориентирования орудия с высокой точностью угла азимута и угла места орудия, обеспечение независимости измерений текущих углов азимута и места орудия от изменений магнитного поля вокруг орудия, сокращение времени перевода орудия из походного положения в боевое, уменьшение демаскировочных свойств орудия.
Предлагаемый способ ориентирования орудия включает в себя последовательные установку измерителя, блока расчета и индикации на орудие, замер данных измерителя, расчет в блоке расчета и индикации текущих значений угла азимута и угла места, индикацию текущих значений угла азимута и угла места, разворот орудия до требуемых значений углов наведения по азимуту и месту, при этом новым является то, что измерителем служит двухантенная спутниковая навигационная система, которую устанавливают параллельно оси визирования орудия с направлением антенн в верхнюю полусферу, при этом замер координат местоположения антенн производят с частотой не менее 1 Гц, расчет текущих значений углов азимута и места в блоке расчета и индикации выполняют по измеренным координатам местоположения антенн.
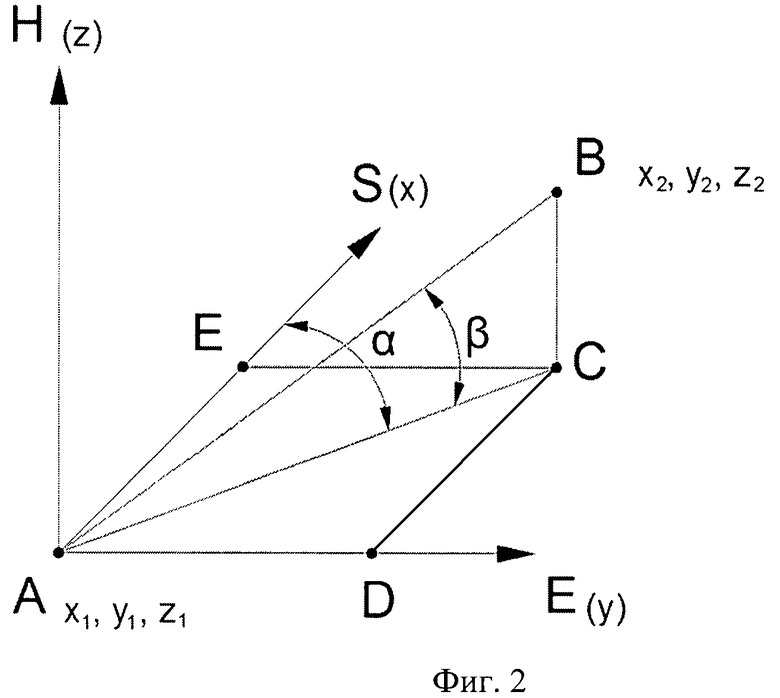
В развитие описанного способа ориентирования орудия определение значений текущих углов азимута и места производят по зависимостям, например:
 ,
,
 ,
,
где α - текущее значение угла азимута, градус;
β - текущее значение угла места, градус;
x1, x2, y1, y2, z1, z2 - прямоугольные географические координаты размещения первой и второй антенн соответственно, м.
Приведенные зависимости обеспечивают приемлемую точность расчета значений углов ориентирования.
Описанный выше предлагаемый способ ориентирования наиболее эффективен для ориентации орудия на местности, когда целеуказание еще не получено от командира. На дисплее блока расчета и индикации отображаются текущие значения углов азимута и места орудия, что позволяет сориентировать орудие по сектору стрельбы.
Однако в ряде случаев эксплуатация орудия требует от оператора после получения целеуказания запоминать значения углов, на которые должно быть развернуто орудие и неоднократно сравнивать показания углов целеуказания и текущих углов ориентирования орудия.
Тогда в способе по п.1 формулы изобретения до индикации значений угла азимута и угла места выполняют ввод в блок расчета и индикации требуемых значений угла азимута и угла места и производят в блоке расчета и индикации дополнительный расчет разности требуемых и текущих значений углов азимута и соответственно углов места, а индикацию углов осуществляют в виде отклонений текущих значений от требуемых значений углов азимута и места, разворот орудия до требуемых значений углов наведения по азимуту и месту. Ввод в блок расчета и индикации требуемых значений углов азимута и места производят из модуля доступа или из пульта управления оператора. Причем модуль доступа представляет собой устройство, выполняющее функции и радиостанции и цифровой вычислительной системы. Пульт управления оператора представляет собой устройство для получения координат и типа цели по средствам связи от командира расчета.
Преимуществом предложенного способа по сравнению со способом по п.1 является повышение функциональных возможностей в части облегчения действий оператора, а именно снижение вероятности ошибки при наведении орудия оператором на цель путем исключения необходимости запоминания оператором требуемых значений угла азимута и угла места, переданных ему командиром. Однако реализация способа по п.3 формулы изобретения по сравнению со способом по п.1 формулы изобретения требует, чтобы в состав изделия входил дополнительный кабель, соединяющий блок расчета и индикации с модулем доступа или пультом управления оператора и производится дополнительный расчет в блоке расчета и индикации разности углов, передаваемых затем на индикатор.
При ориентировании орудия оба способа, описанные в п.1 и в п.3 формулы изобретения имеют место. Способ по п.1 используется при развертывании орудия на местности, при уточнении секторов стрельбы. Способ по п.3 формулы изобретения используется при отработке целеуказания. Переход от одного способа ориентирования к другому осуществляется переключением тумблера выбора способа ориентирования на блоке расчета и индикации.
Заявленное техническое решение поясняется графическими материалами, где на фиг.1 изображен состав устройства ориентирования и способ крепления его на орудии, на фиг.2 изображена схема для определения текущих значений угла азимута и угла места.
Предлагаемый способ ориентирования реализуется с использованием устройства ориентирования, в состав которого входит измеритель 3, блок расчета и индикации 5, соединенный с измерителем кабелем 6, по которому передаются в блок расчета и индикации замеренные измерителем данные. Питание устройства ориентирования производится от блока питания 4, размещенного внутри корпуса блока расчета и индикации. Измеритель представляет собой двухантенную спутниковую навигационную систему, закрепляемую на орудии с помощью штанги 2 и кронштейна 1. Кронштейн выполнен легкосъемным для сокращения времени размещения устройства ориентирования на орудии. Двухантенная спутниковая навигационная система установлена параллельно оси визирования орудия с направлением антенн в верхнюю полусферу. Измеритель производит определение координат местоположения антенн с частотой не менее 1 Гц. Частота 1 Гц достаточна для определения углов азимута и места с заданной точностью, что определено эмпирическим путем. По измеренным координатам местоположения антенн в блоке расчета и индикации выполняется расчет текущих значений углов азимута и места, которые отображаются на дисплее блока расчета и индикации. Блок расчета и индикации крепится на орудии лицевой стороной к оператору орудия и является легкосъемным. Дисплей расположен на лицевой стороне блока индикации.
После занятия расчетом боевой позиции оператор орудия устанавливает устройство ориентирования на орудии, включает его. На блоке расчета и индикации отображаются значения углов азимута и места орудия. Оператор совершает разворот орудия, ориентируя его согласно отведенному сектору стрельбы. Для получения приказов и целеуказания от командира используется модуль доступа, например модуль доступа ВАЯП1.110.167, разработанный ГУП НПЦ «Спурт» (г.Москва) или пульт управления оператора, например пульт командира ТЕЦА.466255.050, разработанный ЗАО НТЦ «ЭЛИНС» (г.Москва).
Описанное выше устройство ориентирования технически выполнимо с использованием схемотехнических решений аппаратуры «Бриз-КМ-РНК» и устройства ориентирования, описанного в патенте [Патент на промышленный образец №62445 «Пусковая установка противотанкового ракетного комплекса «Метис-М»», зарегистрированный в государственном реестре промышленных образцов Российской Федерации 16 апреля 2007 г.].
С применением новых способов ориентирования орудия погрешность определения текущих значений углов азимута и места и соответственно погрешность ориентирования орудия понизились вследствие исключения влияния магнитных помех на измеритель. Показания значений углов азимута и места стали более стабильными. Время перевода орудия из походного в боевое состояние снижается более чем на 1 мин за счет исключения времени на проведение калибровки магнитометра.
Предлагаемые способы ориентирования орудия применимы на различных видах вооружения, например на гранатометах, противотанковых ракетных комплексах, артиллерийских орудиях и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЯМОГО НАВЕДЕНИЯ ВООРУЖЕНИЯ НА ЦЕЛЬ (ВАРИАНТЫ) И УСТРОЙСТВО ОРИЕНТИРОВАНИЯ ПУСКОВОЙ УСТАНОВКИ ВООРУЖЕНИЯ | 2011 |
|
RU2463542C1 |
| ПРОТИВОТАНКОВЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2013 |
|
RU2540152C2 |
| Противотанковый ракетный комплекс | 2015 |
|
RU2612750C1 |
| СПОСОБ ПРЯМОГО НАВЕДЕНИЯ ВООРУЖЕНИЯ НА ЦЕЛЬ | 2003 |
|
RU2239766C1 |
| НОСИМЫЙ ПРОТИВОТАНКОВЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2010 |
|
RU2415366C1 |
| СПОСОБ ПРЯМОГО НАВЕДЕНИЯ ВООРУЖЕНИЯ НА ЦЕЛЬ | 2012 |
|
RU2519289C1 |
| СИСТЕМА ПРИЦЕЛИВАНИЯ ОРУЖИЯ | 2021 |
|
RU2784528C1 |
| СПОСОБ АЗИМУТАЛЬНОГО ПРИЦЕЛИВАНИЯ ПУСКОВОЙ УСТАНОВКИ | 2015 |
|
RU2604592C2 |
| СПОСОБ ПРЯМОГО НАВЕДЕНИЯ ВООРУЖЕНИЯ НА ДВИЖУЩУЮСЯ ЦЕЛЬ | 2011 |
|
RU2463543C1 |
| Способ стрельбы управляемыми снарядами с лазерной полуактивной головкой самонаведения | 2019 |
|
RU2716462C1 |
Изобретение относится к области навигационных измерений. На орудие устанавливаются измеритель, блок расчета и индикации. Производится замер данных измерителя, расчет в блоке расчета и индикации текущих значений угла азимута и угла места орудия, индикация значений угла азимута и угла места и разворот орудия до требуемых значений углов наведения по азимуту и месту. Измерителем является двухантенная спутниковая навигационная система, устанавливаемая на орудии параллельно оси визирования орудия с направлением антенн в верхнюю полусферу. Замер координат местоположения антенн производят с частотой не менее 1 Гц. Расчет в блоке расчета и индикации выполняют по измеренным координатам местоположения антенн. Технический результат заключается в сокращении времени и повышении точности ориентирования орудия, а также в снижении демаскировочных свойств орудия вследствие возможности снижения габаритных характеристик устройства ориентирования. 2 з.п. ф-лы, 2 ил.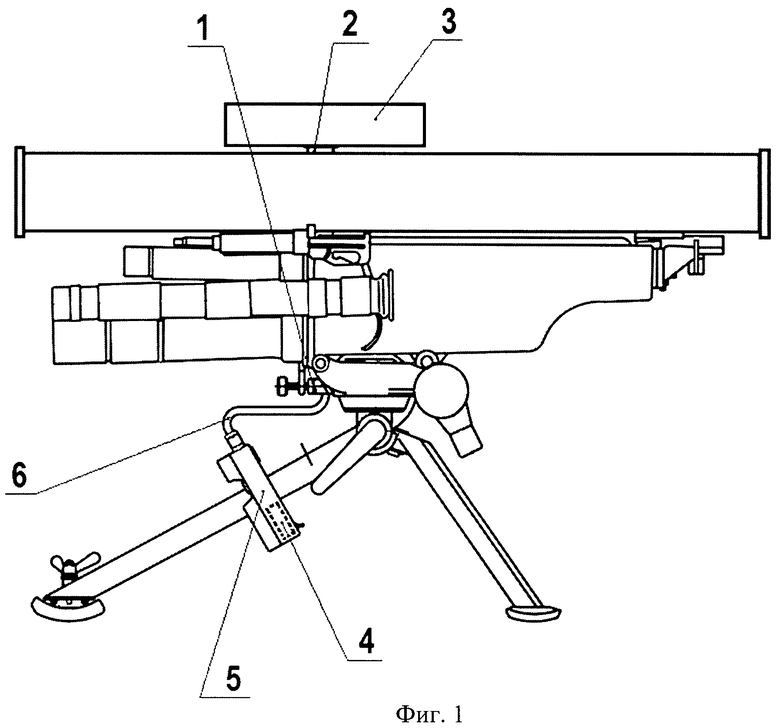
1. Способ ориентирования орудия, включающий последовательные установку измерителя, блока расчета и индикации на орудии, замер данных измерителя, расчет в блоке расчета и индикации текущих значений угла азимута и угла места орудия, индикацию значений угла азимута и угла места, разворот орудия до требуемых значений углов наведения по азимуту и месту, отличающийся тем, что установку измерителя в виде двух антенн спутниковой навигационной системы осуществляют на орудии параллельно оси визирования орудия с направлением антенн в верхнюю полусферу, замер координат местоположения антенн производят с частотой не менее 1 Гц, расчет в блоке расчета и индикации выполняют по измеренным координатам местоположения антенн.
2. Способ по п.1, отличающийся тем, что расчет текущих значений углов азимута и места производят, например, по зависимостям:
где α - текущее значение угла азимута, градус; β - текущее значение угла места, градус; x1, x2, y1, y2, z1, z2 - прямоугольные географические координаты размещения первой и второй антенн соответственно, м.
3. Способ по п.1, отличающийся тем, что до индикации значений угла азимута и угла места выполняют ввод в блок расчета и индикации требуемых значений угла азимута и угла места и производят в блоке расчета и индикации дополнительный расчет разности требуемых и текущих значений углов азимута и соответственно углов места, а индикацию углов осуществляют в виде отклонений текущих значений от требуемых значений углов азимута и места.
| СПОСОБ ОРИЕНТИРОВАНИЯ И НАВЕДЕНИЯ ОРУДИЯ ПРИ СТРЕЛЬБЕ С ЗАКРЫТОЙ ОГНЕВОЙ ПОЗИЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
SU1621676A1 |
| US 7136751 B2, 14.11.2006 | |||
| Состав термитной смеси для сварки чугуна | 1978 |
|
SU747657A1 |
| US 7698983 B1, 20.04.2010 | |||
| Способ изготовления цветных плиток для полов и облицовки стен | 1948 |
|
SU78299A1 |

