Изобретение относится к артиллерии, а именно к способам наведения на цель самоходных орудий или реактивных систем залпового огня при стрельбе с закрытых огневых позиций.
Цель изобретения повышение точности ориентирования и наведения при сокращении времени ориентирования и наведения.
На фиг.1 представлена схема ориентирования орудия; на фиг.2 структурная схема устройства, размещаемого на орудии; на фиг.3 выполнение датчика углов доворота.
Устройство для ориентирования и наведения орудия при стрельбе с закрытой огневой позиции содержит (фиг.1) визир (не показано), установленный на командирской машине 1, размещенные на артиллерийском орудии 2 панораму (не показано), датчик 3 углов доворота, связанный с механизмом 4 горизонтального наведения орудия 2 через редуктор 5, блок 6 формирования управляющего сигнала, исполнительное устройство 7, блок 8 гироскопического ориентирования и приемопередатчик 9 команд. При этом выход датчика 3 углов доворота подключен к первому входу блока 6 формирования управляющего сигнала, к второму входу которого подключен блок 8 гироскопического ориентирования, четвертый вход соединен с выходом приемопередатчика команд 9, а третий вход служит для ручного ввода величин дирекционных углов α оси, α ц продольной оси и направления на цель от расчета орудия.
Датчик 3 углов доворота (фиг.3) содержит генератор 10 тактовых импульсов, соединенный через дешифратор 11 с блоком 12 сканирующих светодиодов, механический модулятор, выполненный в виде прозрачного диска 13 с кодовой маской 14, закрепленного на оси 15, связанной с редуктором 5 с помощью фигурной втулки 16 и прижимной шайбы 17, в которой установлены винты 18, фокон 19 с фотодиодом 20, усилитель 21 напряжения и индикатор 22. При этом блок 12 сканирующих светодиодов оптически сопряжен через механический модулятор 13 и фокон 19 с фотодиодом 20, выход которого через усилитель 21 напряжения соединен с индикатором 22 и блоком 6 формирования управляющих сигналов.
Способ с помощью устройства реализуется следующим образом.
На огневой позиции устанавливают командирскую машину 1 на удалении 30-40 м от орудия 2. Ориентируют визир командирской машины 1 по дирекционным углам и определяют дирекционный угол α ор на панораму орудия 2. При положении ствола, соответствующем оси орудия, отмечаются по визиру командирской машины 1 и определяют угломер по визиру Y, при этом на индикаторе 22 датчика 3 углов доворота высвечивается нулевое значение угла доворота. Рассчитывают α оси орудия по формуле α оси= α ор-(60-00-Y). Затем рассчитывают угол доворота ствола на цель δ по формуле δ= α ц- α оси и наводят орудие на цель на величину рассчитанного доворота δ с помощью механизма 4 горизонтального наведения. При этом вращение через редуктор 5 передается на ось 15 датчика 3 углов доворота.
В датчике 3 углов доворота тактовые импульсы от генератора 10 тактовых импульсов поступают на дешифратор 11, который распределяет импульсы на светодиоды блока 12 сканирующих светодиодов и последовательно включает их. С фотодиода 20 снимается сигнал от светодиодов, промодулированный диском 13 с нанесенной на нем кодовой маской 14. Сигнал в двоичном коде о положении диска 13, который соответствует величине угла доворота δ ствола орудия усиливается с помощью усилителя 20 и высвечивается на индикаторе 22.
Сигналы от датчика 3 угла доворота, блок 8 гироскопического ориентирования, приемопередатчика команд 9 поступают в блок 6 формирования управляющего сигнала, где осуществляется выработка сигнала доворота ствола в нужном направлении, который затем подается на исполнительное устройство 7, посредством которого механизм 4 горизонтального наведения доворачивает ствол орудия в нужном направлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 1995 |
|
RU2108614C1 |
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ (ВАРИАНТЫ) | 1998 |
|
RU2150064C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ (ВАРИАНТЫ) | 2003 |
|
RU2245504C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БОКОВОГО УВОДА НАПРАВЛЕНИЯ СТРЕЛЬБЫ ИЗ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2581997C2 |
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 1998 |
|
RU2133435C1 |
| СПОСОБ РЕШЕНИЯ ОГНЕВОЙ ЗАДАЧИ ДИСТАНЦИОННО УПРАВЛЯЕМЫМ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ ВОЕННОГО НАЗНАЧЕНИЯ В АВТОНОМНОМ РЕЖИМЕ | 2024 |
|
RU2840168C1 |
| СИСТЕМА ОРИЕНТИРОВАНИЯ МОБИЛЬНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО ИЗВЕСТНОМУ ОРИЕНТИРНОМУ НАПРАВЛЕНИЮ | 2024 |
|
RU2838002C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
Изобретение относится к артиллерии, а именно к способам наведения на цель орудий при стрельбе с закрытых огненных позиций. Цель изобретения повышение точности ориентирования и наведения при сокращении времени ориентирования и наведения. Устройство, реализующее способ, содержит визир, установленный на командирской машине, установленные на орудии с панорамой и механизмом 4 горизонтального наведения датчик 3 углов доворота, связанный с механизмом 1 наведения через редуктор 5, блок 6 формирования управляющего сигнала, исполнительное устройство 7, блок 8 гироскопического ориентирования и приемопередатчик 9 команд. После ориентирования командирской машины по дирекционным углам и определения угломера с орудия на визир командирской машины определяют дирекционный угол продольной оси орудия с помощью блока 8 гироскопического ориентирования, вводят значения этого угла в блок 6 формирования управляющего сигнала, в который поступают также сигналы от датчика 3 углов доворота, от приемопередатчика 9 команд. По значениям этих сигналов блок 6 формирования упавляющего сигнала осуществляют выработку сигнала доворота ствола орудия на цель в нужном направлении, в соответствии с которым через исполнительное устройство 7 механизм 4 горизонтального наведения автоматически доводит ствол орудия в нужном направлении. 2 з. п. ф-лы, 3 ил.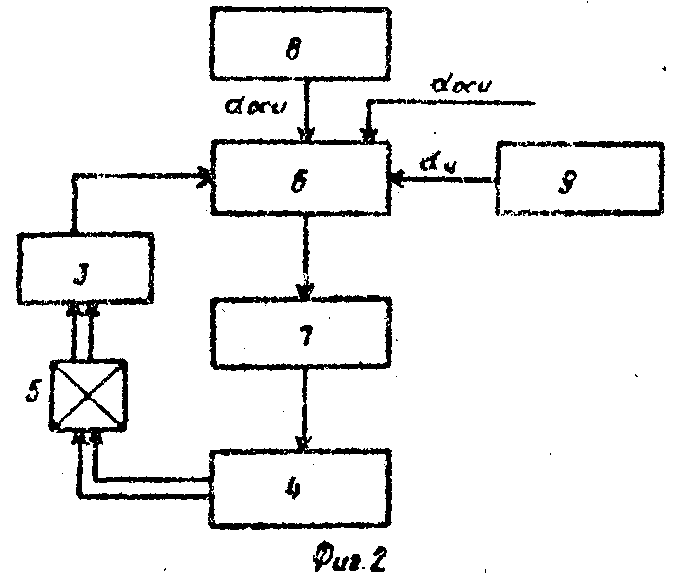
| Орудийная панорама | |||
| Руководство службы | |||
| М.: Военихдат, 1971, с.6-12, 26-27. |
