Изобретение относится к азимутальному прицеливанию мобильных пусковых установок (ПУ) ракетно-артиллерийского вооружения сухопутных войск при стрельбе по ненаблюдаемой цели.
Известны способы азимутального прицеливания ракетно-артиллерийского вооружения сухопутных войск при стрельбе по ненаблюдаемой цели (с закрытых позиций), основанные на угломерной привязке основного направления стрельбы к характерным местным ориентирам (реперам) с применением артиллерийской буссоли - см., например, В.А. Надин, И.А. Скорик, В.М. Шегерян «Артиллерия». М., ДОСААФ, 1972, стр. 252-280, 321; с применением механического прицела, панорамы и коллиматора - см., например, А.Б. Широкорад. «Отечественные минометы и реактивная артиллерия». Минск Харвест, Москва ACT, 2000, стр.368.
Известен способ ориентирования (иначе - грубого прицеливания) орудия (ПУ) с применением жестко базируемой на орудии (ПУ) параллельно линии визирования двухантенной системы спутниковой навигации (измерителя азимута - т.н. спутникового компаса) - см., например, патент РФ №2466343 (ближайший аналог). В предложенном техническом решении установку двухантенной системы измерителя на орудие (ПУ) осуществляют посредством легкосъемного кронштейна и штанги, при этом антенны направляют в верхнюю полусферу, а расчет и индикацию значения азимута производят с частотой не менее 1 Гц - с последующим разворотом ПУ по направлению стрельбы.
Однако предложенный способ ориентирования орудия (ПУ) имеет принципиальные ограничения по точности определения измеренного посредством спутникового компаса азимута и повышенные требования к стойкости крепления антенн, что связано с особенностями базирования измерителя, а именно непосредственно на орудие (ПУ), при неизбежном наличии габаритных, ударных (при выстреле/запуске боеприпаса), конструктивно-компоновочных и других ограничений, определяемых специфической целевой работой орудия (ПУ).
Техническим результатом предлагаемого изобретения является существенное (минимум на порядок) повышение точности азимутального прицеливания пусковой установки, в т.ч. со сменными транспортно-пусковыми контейнерами (ТПК) с ракетами класса «земля - земля», при минимизации действующих на спутниковый компас неблагоприятных воздействий от специфической целевой работы ПУ.
Указанная цель достигается тем, что подъемно-поворотную ПУ (в т.ч. с быстросменными ТПК) и спутниковый измеритель располагают на мобильном шасси (МШ) длиной не менее 3 м, посредством антенн спутникового измерителя формируют базовое направление (БН) в диапазоне углов между продольной осью и диагональю МШ в плане, для чего одну антенну измерителя устанавливают в передней, а вторую антенну измерителя устанавливают в задней оконечности МШ стационарно либо на раскладной штанге, и производят координатную привязку БН к связанному с МШ неподвижному угломерному лимбу ПУ, при этом разворот ПУ по направлению стрельбы производят относительно БН, зафиксированного посредством угломерного лимба. В ряде случаев на МШ может быть дополнительно размещена третья антенна измерителя азимута, которую при остановке МШ для прицеливания ПУ выносят вдоль БН на расстояние до 1 км. При этом контроль установки выносной антенны на линии БН может осуществляться с использованием лазерного сигнализатора либо диоптрического размещения световой сигнализации на антеннах измерителя, жестко закрепленных на МШ. Следует отметить, что на расстояние 0,5…3,0 длины МШ дополнительную азимутальную антенну измерителя целесообразно выносить посредством раскладной механической штанги. Дополнительно на МШ с двухантенным измерителем азимута для определения крена может быть стационарно установлена боковая антенна измерителя - перпендикулярно БН на расстоянии 0,2…1,2 ширины МШ (с соответствующим дополнением блока расчета и индикации текущими значениями крена МШ). При этом, в ряде случаев, две антенны измерителя размещают на одинаковой высоте на правой и левой сторонах кабины МШ, а третью антенну измерителя размещают в задней оконечности МШ на таком же расстоянии от продольной оси МШ, как и одну из антенн на кабине. В некоторых случаях может оказаться целесообразным размещение параллельно прицельной оси ПУ двух антенн измерителя азимута на оконечностях дополнительно введенной балки. При этом определение местоположения антенн измерителя при их установке на МШ и ПУ целесообразно производить с использованием оптических контрольных элементов, которые жестко закрепляют на каждой антенне.
Принципиальная схема пусковой установки на МШ, которая реализует предложенный способ азимутального прицеливания, приведена на фиг. 1. Формирование посредством двухантенного измерителя базового направления параллельно (вдоль) продольной оси МШ представлено на фиг. 2, по диагонали МШ (в плане) - на фиг. 3. Схемы размещения антенн измерителя на раскладных механических штангах показаны на фиг. 4 и фиг. 6 (варианты). Принципиальная схема развертывания выносной антенны измерителя относительно МШ приведена на фиг. 5. Вариант стационарного размещения на МШ трехантенного измерителя представлен на фиг. 7. Схема дополнительного двухантенного измерителя на оконечностях балки ПУ показана на фиг. 8.
Приняты обозначения:
1 - силовой корпус (рама) и трансмиссия МШ, включая обеспечивающие системы и агрегаты;
2 - кабина МШ;
3 - подъемно-поворотная ПУ;
4 - ТПК (направляющая) ракетного (кинетического) боеприпаса;
5 - передняя антенна измерителя;
6 - задняя антенна измерителя;
7 - раскладная (выдвижная) механическая штанга;
8 - дополнительная выносная антенна измерителя;
9 - боковая антенна измерителя;
10 - балка;
11 - головная на ПУ антенна измерителя;
12 - хвостовая на ПУ антенна измерителя.
Азимутальное прицеливание ПУ по предлагаемому техническому решению осуществляется следующим образом. Мобильное шасси поз.1 представляет собой колесную (гусеничную, колесно-гусеничную, на воздушной подушке и т.п.) платформу, на которой размещены, в частности, кабина поз. 2 (предназначена для штатного размещения экипажа и управления МШ) и подъемно-поворотная ПУ поз. 3 с закрепленным на ней одним либо несколькими ТПК (направляющими) поз. 4. Допускается как сменная (например, для одноразовых ТПК), так и стационарная (например, для многоствольных направляющих с перезаряжанием боеприпасов) реализация конструктива поз. 4. В данном случае важно отметить, что с учетом характерной длины ТПК (направляющих) поз. 4 тактического (оперативно-тактического) ракетно-артиллерийского вооружения сухопутных войск в диапазоне 2…12 м, общая длина МШ поз. 1 - для классической компоновки ПУ поз. 3 - будет на уровне 3…14 м (см. фиг. 1-3). В этой связи представляется целесообразным использование жесткой длинномерной базы МШ поз. 1 для определения с высокой точностью (не хуже десятых долей углового градуса) географического азимута МШ (базового направления) посредством двухантенного измерителя координат на базе спутниковых навигационных систем ГЛОНАСС, GPS, BeiDou (в перспективе - Galileo, IRNSS) и последующее азимутальное прицеливание (разворот по направлению стрельбы) ПУ поз. 3 именно относительно измеренного с высокой точностью БН. Расположение БН в плане, определяемое вдоль линии контрольных элементов антенн поз. 5 и поз. 6, целесообразно либо вдоль (параллельно) продольной оси МШ поз. 1 (см. фиг. 2, 4), либо по диагонали МШ поз. 1 (см. фиг. 3), либо в диапазоне углов между продольной осью и одной из диагоналей МШ (в общем случае). Материализованное таким образом БН (на длине/базе не менее 3 м) координатно привязывают (с точностью до десятых…сотых долей углового градуса) к жестко связанному с МШ поз. 1 неподвижному азимутальному угломерному лимбу ПУ поз. 3. При этом разворот ПУ поз. 3 по направлению стрельбы с требуемой точностью производят относительно БН, зафиксированного посредством неподвижного угломерного лимба (с периодическим контролем координатной привязки).
Как правило, азимутальное прицеливание ПУ поз. 3 по предлагаемому техническому решению производится с места (при неподвижном МШ поз. 1), хотя в ряде случаев - при существенно сниженных требованиях к точности - допускается азимутальное прицеливание ПУ поз. 3 в движении (при отсутствии резких эволюций МШ поз. 1). При этом с целью улучшения точности определения БН за счет увеличения базы МШ поз. 1 одна (поз. 5) либо обе (поз. 5, поз. 6) антенны измерителя могут быть выдвинуты вдоль БН (например, вперед и/или назад по продольной оси МШ поз. 1) на раскладной штанге поз. 7 (см. фиг. 4).
Дальнейшее увеличение точности азимутального прицеливания ПУ поз. 3 при стрельбе с места может быть достигнуто путем кардинального увеличения антенной базы измерителя азимута. Вариантом технической реализации в данном случае может являться оснащение МШ поз. 1 дополнительной - третьей - антенной поз. 8 измерителя азимута (см. фиг. 5), которую при занятии МШ позиции для стрельбы выносят вдоль БН (вперед или назад) на расстояние до 1 км (выбрано из условия гарантированного обеспечения точности азимутального прицеливания ПУ не хуже сотых...тысячных долей углового градуса для стрельбы оперативно-тактических ракет сухопутных войск на максимальный радиус действия). При этом контроль установки выносной антенны поз. 8 измерителя на линии БН осуществляют, например, с использованием лазерного сигнализатора (обеспечивает удержание лазерного луча с МШ поз. 1 на контрольном элементе выносной антенны поз. 8) либо с использованием диоптрического размещения световой индикации на антеннах поз. 5 и поз. 6, жестко закрепленных на МШ поз. 1 (диоптрическое размещение световой индикации предполагает однозначное «концентрическое» визирование оператором изображения антенных устройств поз. 5, поз. 6 с линии БН при правильной установке антенны поз. 8 и, соответственно, искажение «концентрической» геометрии изображения в случае смещения антенны поз. 8 с линии БН).
В более простом варианте технической реализации - при достаточности отнесения дополнительной антенны поз. 8 на расстояние 0,5…3,0 длины МШ поз. 1 - указанную дополнительную антенну поз. 8 выносят вдоль БН (вперед или назад) посредством раскладной штанги поз. 7 (см. фиг. 6).
При необходимости иметь данные по крену МШ поз. 1 на мобильном шасси может быть жестко установлена на максимальном удалении (плече) от БН дополнительная боковая антенна поз. 9 измерителя (см. фиг. 7). С учетом рациональных значений необходимой точности определения крена, прочности/жесткости несущих силовых элементов, в т.ч. выносных, удобства монтажа и эксплуатации размещение антенны поз. 9 целесообразно выполнять на расстоянии 0,2…1,2 ширины МШ поз. 1 перпендикулярно БН. Например, представляется рациональным жесткое (стационарное) размещение антенн поз. 5 и поз. 9 измерителя на одинаковой высоте на правой и левой сторонах кабины поз. 2 МШ поз. 1 (определение крена), при этом антенну поз. 6 измерителя стационарно размещают в задней оконечности МШ поз. 1 на таком же расстоянии (плече) от продольной оси МШ, как и одну из антенн (в данном случае, поз. 5) на кабине поз. 2 (определение БН). Соответственно, блок расчета и индикации программно дополняется в части определения текущих значений крена МШ поз. 1.
В ряде случаев может найти применение вариант формирования второго базового направления (БН2) параллельно прицельной линии ПУ поз. 3 в дополнение к основному (первому) базовому направлению (БН1), формируемому на МШ поз. 1 как описано выше (см. фиг. 8). При этом дополнительные антенны - поз. 11 (головная антенна) и поз. 12 (хвостовая антенна) измерителя азимута - жестко размещают на оконечностях дополнительно введенной балки поз. 10, которую стационарно закрепляют на ПУ поз. 3 параллельно прицельной линии. Данный вариант позволяет оперативно обеспечить предварительное (грубое) азимутальное прицеливание ПУ, что может найти применение на некоторых ракетно-артиллерийских комплексах, допускающих открытие огня с минимальной предварительной подготовкой. Кроме того, данный вариант позволяет работать в штатном режиме со сменными ТПК, применять унифицированные по датчиковому и вычислительному составу автоматизированные информационно-управляющие системы прицеливания ПУ, взаимно калибровать, а также, в ряде случаев, дублировать формирование базового направления.
Следует отметить, что определение местоположения стационарно закрепляемых и выносных на штанге поз. 7 антенн измерителя при их размещении на МШ поз. 1 и балке поз. 10 ПУ поз. 3 целесообразно осуществлять с использованием оптических контрольных элементов, которые жестко закрепляют на каждой антенне. При этом посредством традиционной технологии взаимной привязки объектов на базе оптических коллиматоров достигаются необходимые точности установки антенн измерителя в том или ином описанном выше сочетании, которые, в свою очередь, обеспечивают заявленную точность азимутального прицеливания ПУ.
Прицеливание подъемно-поворотной ПУ с заданной точностью по углу места (в вертикальной плоскости) осуществляется посредством штатных аппаратно-программных средств, включая датчики угла наклона ПУ (например, на базе инклинометров).
Применение предложенного технического решения целесообразно для азимутального прицеливания дальнобойных ракетных (артиллерийских) комплексов сухопутных войск, размещаемых на мобильных шасси. При этом длинномерная база МШ позволяет достигать повышенных точностей азимутального прицеливания ПУ относительно базового направления (на уровне десятых…сотых долей углового градуса), что гарантированно обеспечивает решение задачи высокоточного попадания в цель при стрельбе с закрытых позиций.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТИРОВАНИЯ ОРУДИЯ | 2011 |
|
RU2466343C1 |
| СПОСОБ ПОДДЕРЖАНИЯ ДВИЖЕНИЯ БАТАЛЬОНА СУХОПУТНЫХ ВОЙСК РЕАКТИВНОЙ СИСТЕМОЙ ЗАЛПОВОГО ОГНЯ И РЕАКТИВНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2249170C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний | 2017 |
|
RU2661676C1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170906C1 |
| ИНФОРМАЦИОННО-АНАЛИТИЧЕСКИЙ КОМПЛЕКС НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2010 |
|
RU2428660C1 |
| ОБЪЕКТ БРОНЕТЕХНИКИ НА КОЛЕСНОМ ШАССИ | 2007 |
|
RU2355977C1 |
| ОБЪЕКТ БРОНЕТЕХНИКИ НА КОЛЕСНОМ ШАССИ | 2007 |
|
RU2355992C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
Изобретение относится к азимутальному прицеливанию мобильных пусковых установок (ПУ) ракетно-артиллерийского вооружения сухопутных войск при стрельбе по ненаблюдаемой цели. Техническим результатом предлагаемого изобретения является повышение точности азимутального прицеливания пусковой установки, в т.ч. со сменными транспортно-пусковыми контейнерами (ТПК) с ракетами класса «земля - земля», при минимизации действующих на спутниковый измеритель неблагоприятных воздействий от специфической целевой работы ПУ. Подъемно-поворотную ПУ и спутниковый измеритель располагают на мобильном шасси (МШ) длиной не менее 3 м. Посредством антенн спутникового измерителя формируют базовое направление (БН) в диапазоне углов между продольной осью и диагональю МШ в плане. Одну антенну измерителя устанавливают в передней, а вторую антенну измерителя устанавливают в задней оконечности МШ стационарно либо на раскладной штанге. Производят координатную привязку БН к связанному с МШ неподвижному угломерному лимбу ПУ. Разворот ПУ по направлению стрельбы производят относительно БН, зафиксированного посредством угломерного лимба. 8 з.п. ф-лы, 8 ил.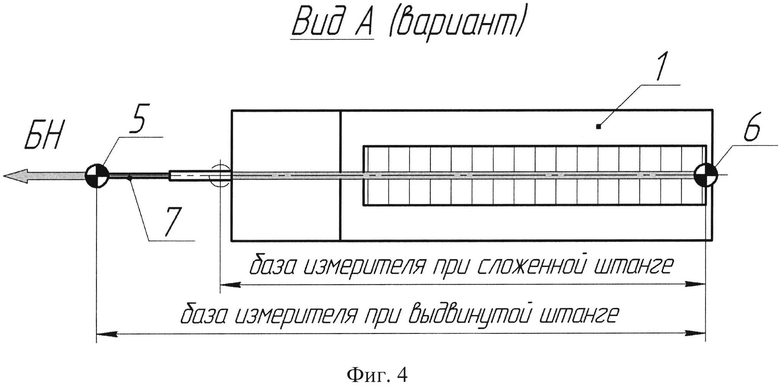
1. Способ азимутального прицеливания пусковой установки (ПУ), включающий определение азимута посредством двухантенного, с направлением антенн в верхнюю полусферу, спутникового измерителя координат, расчет и индикацию значения азимута с частотой не менее 1 Гц и разворот ПУ по направлению стрельбы, отличающийся тем, что подъемно-поворотную ПУ и спутниковый измеритель располагают на мобильном шасси (МШ) длиной не менее 3 м, посредством антенн спутникового измерителя формируют базовое направление (БН) в диапазоне углов между продольной осью и диагональю МШ в плане, для чего одну антенну измерителя устанавливают в передней оконечности МШ, а вторую антенну измерителя устанавливают в задней оконечности МШ стационарно либо на раскладной штанге и производят координатную привязку БН к связанному с МШ неподвижному угломерному лимбу ПУ, при этом разворот ПУ по направлению стрельбы производят относительно БН, зафиксированного посредством угломерного лимба.
2. Способ азимутального прицеливания ПУ по п. 1, отличающийся тем, что на МШ дополнительно размещают третью антенну измерителя азимута, которую при остановке МШ для прицеливания ПУ выносят вдоль БН на расстояние до 1 км.
3. Способ азимутального прицеливания ПУ по п. 2, отличающийся тем, что контроль установки выносной антенны измерителя на линии БН осуществляют с использованием лазерного сигнализатора.
4. Способ азимутального прицеливания ПУ по п. 2, отличающийся тем, что контроль установки выносной антенны измерителя на линии БН осуществляют с использованием диоптрического размещения световой индикации на антеннах измерителя, жестко закрепленных на МШ.
5. Способ азимутального прицеливания ПУ по п. 2, отличающийся тем, что на расстояние 0,5…3,0 длины МШ третью антенну измерителя выносят вдоль БН посредством раскладной штанги.
6. Способ азимутального прицеливания ПУ по п. 1, отличающийся тем, что на МШ стационарно устанавливают дополнительную боковую антенну измерителя перпендикулярно БН на расстоянии 0,2…1,2 ширины МШ и дополняют расчет и индикацию значениями крена МШ.
7. Способ азимутального прицеливания ПУ по п. 6, отличающийся тем, что две антенны измерителя размещают на одинаковой высоте на правой и левой сторонах кабины МШ, а третью антенну измерителя размещают в задней оконечности МШ на таком же расстоянии от продольной оси МШ, как и одну из антенн на кабине.
8. Способ азимутального прицеливания ПУ по п. 1, отличающийся тем, что параллельно прицельной оси ПУ на оконечностях дополнительно введенной балки ПУ жестко размещают две антенны измерителя.
9. Способ азимутального прицеливания ПУ по пп. 1, 6, 8, отличающийся тем, что определение местоположения антенн измерителя при их установке на МШ и балку ПУ производят с использованием оптических контрольных элементов, которые жестко закрепляют на каждой антенне.
| СПОСОБ ОРИЕНТИРОВАНИЯ ОРУДИЯ | 2011 |
|
RU2466343C1 |
| СПОСОБ ПРЕДСТАРТОВОЙ ВЫСТАВКИ ВЫСОКОТОЧНЫХ РАКЕТ | 1995 |
|
RU2150124C1 |
| Переносный станок для шлифования направляющих станины токарного станка | 1960 |
|
SU142907A1 |
| БОЕВАЯ МАШИНА | 2010 |
|
RU2442097C1 |
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2102678C1 |

