Предлагаемое изобретение относится к средствам управления газообменом между замкнутым герметичным объемом и внешней средой и может быть использовано для автоматического поддержания заданного состава газовой среды в химических реакторах, контейнерах.
Известна автоматизированная система управления степенью герметичности защитной оболочки на судах (патент РФ №02151383, МПК G01M 3/00, публ. 20.06.2000 г.), содержащая блок управления, сформированный по заранее заданному алгоритму, построенному на логической связи электрических параметров элементов автоматизированной системы, который включает источник электропитания, аналого-цифровой преобразователь информационных и силовых управляющих сигналов, датчики, регистрирующие параметры автоматизированной системы, средства коммутации информационных и силовых управляющих сигналов, электрически связанные с цифровым электронно-вычислительным устройством и подключенные к электроприводам регулируемых рабочих органов исполнительных устройств, составляющие систему исполнительных механизмов, собственно исполнительные устройства и электроприводы регулируемых рабочих органов группы исполнительных устройств, пневмомагистрали, соединяющие датчики с исполнительными механизмами и с объектом регулирования.
Недостатком известного устройства является отсутствие возможности управления динамикой естественной вентиляции в герметичном контейнере, в котором происходит каталитическое окисление водорода кислородом воздуха.
Задачей предлагаемого изобретения является разработка автоматизированной системы и способа ее задействования для управления динамикой естественной вентиляции герметичных контейнеров, в которых происходит каталитическое окисление водорода кислородом воздуха.
Новый технический результат, обеспечиваемый при использовании предлагаемого устройства, заключается в обеспечении возможности управления динамикой естественной вентиляции в герметичном контейнере, в котором происходит каталитическое окисление водорода кислородом воздуха, поступающим за счет газообмена герметичного контейнера с окружающей средой, для обеспечения регулируемого притока кислорода из воздуха в указанный контейнер с размещенными в нем источниками водорода и других газов, доступ к которому ограничен, обеспечения восстановления работоспособности катализатора.
Указанные задача и технические результаты обеспечиваются тем, что автоматизированная система управления динамикой естественной вентиляции в герметичном контейнере содержит блок управления, сформированный по заранее заданному алгоритму, построенному на логической связи электрических параметров элементов автоматизированной системы, который включает источник электропитания, аналого-цифровой преобразователь информационных и силовых управляющих сигналов в виде блока преобразования интерфейсов, датчики, регистрирующие параметры автоматизированной системы, средства коммутации информационных и силовых управляющих сигналов в виде блока ввода-вывода интерфейсов, электрически связанные с цифровым электронно-вычислительным устройством и подключенные к электроприводам регулируемых рабочих органов исполнительных устройств, составляющие систему исполнительных механизмов, собственно исполнительные устройства и электроприводы регулируемых рабочих органов группы исполнительных устройств, пневмомагистрали, соединяющие датчики с исполнительными механизмами и с герметичным контейнером, согласно изобретению, в качестве исполнительных устройств автоматизированная система содержит электропневмоклапаны, размещенные по одному в пневмомагистралях, связывающих их с герметичным контейнером, при этом в одной пневмагистрали электропневмоклапан соединен дополнительно с датчиком кислорода, а в другой - с фильтром, сообщающимся с внешней средой, и имеют прямые и обратные электрические связи с блоком управления по цепям управления и питания для управления изменением положения рабочих органов электропневмоклапанов, в герметичном контейнере дополнительно размещены источники водорода и других газов, поглотители газообразных продуктов процесса каталитического окисления водорода и других газов.
Кроме того, автоматизированная система содержит заданное число пневмомагистралей с электропневмоклапанами, подключенных к соответствующему числу герметичных контейнеров и к блоку управления через многоканальный блок ввода-вывода интерфейсов.
Кроме того, автоматизированная система содержит в качестве исполнительного устройства дополнительно в каждой пневмомагистрали электропневмодроссели, соединенные с электропневмоклапанами.
Кроме того, автоматизированная система содержит датчик водорода, совмещенный с датчиком кислорода в едином аналитическом блоке.
Кроме того, автоматизированная система содержит в каждой пневмомагистрали между блоком управления и электропневмоклапанами по одному электрорезаку.
Новым в предлагаемом устройстве является обеспечение надежности процесса регулирования содержания кислорода и водорода в герметичном контейнере и гибкости процесса за счет своевременной и в необходимом количестве корректировки концентрации указанных компонентов во избежание достижения критических концентраций кислорода и водорода.
Известен в качестве прототипа предлагаемого способ задействования автоматизированной системы управления степенью герметизации в защитной оболочке (патент РФ №02151383, МПК G01M 3/00, публ. 20.06.2000 г.), включающий формирование управляющего сигнала для приведения в действие исполнительных устройств, формирования и коммутации информационных сигналов и управляющих команд.
Недостатком способа-прототипа является отсутствие возможности управления динамикой естественной вентиляции в герметичном контейнере, в котором происходит каталитическое окисление водорода кислородом воздуха.
Новый технический результат, обеспечиваемый при использовании предлагаемого способа, заключается в обеспечении возможности управления динамикой естественной вентиляции в герметичном контейнере, в котором происходит каталитическое окисление водорода кислородом воздуха, поступающего за счет газообмена герметичного контейнера с окружающей средой, для обеспечения регулируемого притока кислорода из воздуха в указанный контейнер с размещенными в нем источниками водорода и других газов, доступ к которому ограничен, обеспечения восстановления работоспособности катализатора.
Указанные задача и технический результат при использовании предлагаемого способа обеспечиваются тем, что для формирования управляющего сигнала для приведения в действие исполнительных устройств, формирования и коммутации информационных сигналов и управляющих команд, согласно изобретению, используют блок управления, сформированный по заранее заданному алгоритму, построенному на логической связи электрических параметров элементов автоматизированной системы, характеризующих начальные, конечные и промежуточные их положения, периодичность опроса датчиков, результаты измерения концентрации кислорода (водорода), посредством которых проводят аппроксимацию показаний датчиков одной из трех функциональных зависимостей содержания кислорода (водорода) в герметичном контейнере от времени (линейной, полиноминальной, экспоненциальной), заложенных в алгоритм, с последующим определением путем интерполяции указанной зависимости промежутка времени, за который произойдет допустимый расход кислорода (рост содержания водорода), и передачи сформированного управляющего сигнала по интерфейсу на соответствующее открытие электроприводом электропневмоклапана в пневмомагистрали, связывающей его с фильтром, для запуска кислорода из воздуха в герметичный контейнер (выхода водорода в обратном направлении), компенсирующий расход кислорода, или закрытие электропневмоклапана в пневмомагистрали, соединяющей его с фильтром, по завершении процесса газообмена для измерения датчиками текущей концентрации кислорода (водорода) в герметичном контейнере, результаты этих измерений фиксируются в памяти блока управления, затем передаются по интерфейсу на электропривод исполнительных устройств с возможностью доведения величины концентрации кислорода (водорода) в герметичном контейнере до уровня номинальной (допустимой).
Предлагаемое изобретение поясняется следующим образом.
На фиг.1 представлен общий вид основного варианта автоматизированной системы управления динамикой естественной вентиляции в герметичном контейнере (не показан), где 1, 9 - электропневмоклапаны, 2 - датчик кислорода, 3 - блок управления, содержащий: 4 - источник электропитания, 5 - блок ввода-вывода интерфейсов, 6 - блок преобразования интерфейсов; 7 - пневмомагистрали, 8 - фильтр.
Автоматизированная система управления динамикой естественной вентиляции в герметичном контейнере работает следующим образом.
В начальный момент подается управляющий сигнал из блока управления 5 на открытие электропневмоклапана в пневмомагистрали, соединяющей герметичный контейнер с датчиком кислорода (и датчиком водорода при его наличии).
Затем через блок управления автоматизированной системы производится опрос показаний датчика кислорода 2 на содержание кислорода в герметичном контейнере, который будет проводиться в режиме текущего времени. Датчик задействуется от источника электропитания 4.
Блок управления сформирован по заранее заданному алгоритму, построенному на логической связи электрических параметров элементов автоматизированной системы, а именно на связи (линейной, полиноминальной, экспоненциальной) исходных показаний, заложенных в алгоритм, с последующим определением путем интерполяции с помощью указанных зависимостей результатов текущих измерений концентрации кислорода от промежутка времени, за который произойдет допустимый расход кислорода в герметичном контейнере. При достижении крайних заданных значений расхода кислорода производится передача сформированного управляющего сигнала по интерфейсу на соответствующее открытие электроприводом электропневмоклапана в пневмомагистрали с фильтром для запуска кислорода из воздуха внешней среды в герметичный контейнер, компенсирующего расход кислорода, или закрытие электропневмоклапана в пневмомагистрали с фильтром по завершении процесса. Результаты этих измерений фиксируются в памяти блока управления, затем преобразуются в сигнал управления и передаются по интерфейсу на электропривод исполнительных устройств (электропривод электропневмоклапана) с возможностью доведения величины концентраций кислорода и водорода в герметичном контейнере до уровня номинальной (допустимой).
В более общем случае при наличии в системе дополнительно датчика водорода, совмещенного с датчиком кислорода в едином аналитическом блоке, номинальными (допустимыми) значениями показаний датчиков кислорода и водорода являются следующие:
Сo2=20,9 об.%; Сн2=0 об.%, что соответствует соотношению кислорода и водорода в атмосфере воздуха.
Критическими (конечными) значениями концентраций кислорода и водорода являются следующие значения:
Со2=2,0 об.%; Сн2=4,0 об.%, что соответствует состоянию «гремучей смеси» (горючей смеси) и является недопустимым для герметичного контейнера. Сигналы, соответствующие номинальным и критическим значениям концентраций кислорода и водорода, закладываются в блок памяти в составе блока 5 и поступают в блок 6.
При наличии датчика водорода измеряют исходные значения концентраций кислорода и водорода и тем и другим датчиком. Соответствующие этим значениям концентраций кислорода и водорода электрические сигналы (аналоговые сигналы) датчиков кислорода и водорода поступают в блок ввода-вывода интерфейсов 5 и преобразуются в цифровой сигнал аналого-цифровым преобразователем из состава блока 5. Эти значения закладываются в блок памяти в составе блока 5 и поступают в блок 6, где преобразуются в вид, необходимый для передачи по последовательной или параллельной линии внешним потребителям (ПК или оператору автоматизированной системы). Периодичность опроса текущих показаний датчиков кислорода и водорода определяется в блоке управления на основе построения графических зависимостей, например линейных или иных, выявленных в процессе наблюдений за изменением текущих значений концентраций кислорода и водорода, аппроксимирующих и интерполирующих зависимостей, соединяющих точки, соответствующие исходным, текущим и критическим значениям концентраций кислорода и водорода.
Последующие изменения показаний датчиков кислорода и водорода (Стекущее) в режиме текущего времени (с учетом истечения водорода из источников водорода и расхода кислорода на каталитическое окисление водорода в герметичном контейнере) будут приближаться к критическим значениям.
Процесс измерения и передачи текущих сигналов будет производиться аналогично измерению исходных значений концентраций кислорода и водорода.
Все измеренные сигналы будут заложены в блок памяти в составе блока 5. Количество текущих измерений концентраций кислорода и водорода в период времени между исходными (номинальными) и конечными (критическими) их значениями составляет 3-5 точек, что ограничено емкостью источников питания 4 при длительной эксплуатации предлагаемой системы.
В блоке управления 3 при достижении текущих значений концентраций кислорода и/или водорода, равных критическим значениям, формируется сигнал управления на закрытие исполнительными механизмами электропневмоклапана в пневмомагистрали, соединяющей герметичный контейнер с датчиком кислорода (водорода) и открытие электропневмоклапана в пневмомагистрали, соединяющей герметичный контейнер с фильтром 8.
В этот момент происходит естественная вентиляция герметичного контейнера за счет притока воздуха из внешней среды и достижение исходных (допустимых) значений концентраций кислорода и водорода. Процесс естественной вентиляции может повторяться неоднократно за период времени эксплуатации герметичного контейнера.
Предлагаемая автоматизированная система предназначена для управления медленно текущих самопроизвольных газообменных процессов.
Таким образом, предлагаемая автоматизированная система обеспечивает надежное и гибкое управление динамикой естественной вентиляции в герметичном контейнере, в котором происходит каталитическое окисление водорода кислородом воздуха, поступающего за счет газообмена герметичного контейнера с окружающей средой, для обеспечения регулируемого притока кислорода из воздуха в указанный контейнер с размещенными в нем источниками водорода и других газов, доступ к которому ограничен, обеспечения восстановления работоспособности катализатора на основе палладия.
Возможность промышленной реализации предлагаемого изобретения подтверждается следующими примерами.
Пример 1. Предлагаемая автоматизированная система опробована на действующем макете, где в качестве функциональных составляющих системы использованы покупные готовые изделия блоки (модуль аналогового ввода типа NL-4RTD, блок питания типа DRA18-12, блок интерфейсов типа NL-232C, электропневмоклапан типа ЭК-48, датчик кислорода типа Оксик-15, фильтр-поглотитель типа АПДС14).
В начальный момент времени герметичный контейнер заполнен азотом в качестве инертной среды, а содержание кислорода и водорода соответствует их критическим значениям, электропневмоклапаны закрыты. Блок управления 3 формирует сигнал на открытие электропневмоклапана 1 в пневмомагистрали 7, соединенной с датчиком кислорода, открывается электропневмоклапан 1.
Показания датчика, регистрирующего концентрацию кислорода, соответствуют критическому значению. Блок управления 3 формирует сигнал на открытие электропневмоклапана 1 в пневмомагистрали 7, соединенной с фильтром 8, открывается электропневмоклапан 9. В этот момент происходит естественная вентиляция герметичного контейнера за счет газообмена с внешней средой. При этом концентрация кислорода в герметичном контейнере достигает номинального значения (соответствующего его содержанию в воздухе), а концентрация водорода стремится к нулю. Это фиксируется датчиком кислорода. После завершения процесса газообмена блок управления подает сигнал на закрытие электропневмоклапанов 1 и 9. В условиях примера 1 принцип работы автоматизированной системы, состоящей из традиционных блоков, ограничен только возможностью реализации процесса регулирования ситуации с изменением концентраций водорода и кислорода от критической до номинальной, тогда как предлагаемая автоматизированная система обладает большим диапазоном функционирования за счет реализации с ее помощью процесса регулирования ситуации с изменением концентраций водорода и кислорода от номинальной до критической и наоборот.
Пример 2. В условиях примера 1, но с дополнительным включением в систему датчика водорода, совмещенного с датчиком кислорода в едином аналитическом блоке, что обеспечило возможность одновременного измерения концентрации водорода в герметичном контейнере.
Пример 3. В условиях примера 1, но с дополнительным включением в систему электропневмодросселя, что позволило обеспечить плавность газообменного процесса между герметичным контейнером и внешней средой.
Результаты экспериментальных исследований сведены в таблицу 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ДИНАМИКОЙ ПРИНУДИТЕЛЬНОЙ ВЕНТИЛЯЦИИ В ГЕРМЕТИЧНОМ КОНТЕЙНЕРЕ И СПОСОБ ЕЕ ЗАДЕЙСТВОВАНИЯ | 2011 |
|
RU2453895C1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ СОСТАВА ВОЗДУШНОЙ СРЕДЫ В ГЕРМЕТИЧНОМ КОНТЕЙНЕРЕ | 2011 |
|
RU2465512C1 |
| УСТРОЙСТВО ДЛЯ ПРИНУДИТЕЛЬНОГО ГАЗООБМЕНА В ГЕРМЕТИЧНОМ КОНТЕЙНЕРЕ | 2011 |
|
RU2465513C1 |
| Система управления скоростью движения транспортного средства | 1987 |
|
SU1537575A1 |
| СИСТЕМА НАДДУВА ТОПЛИВНЫХ БАКОВ ДВИГАТЕЛЬНОЙ УСТАНОВКИ КОСМИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2119082C1 |
| Автоматическая система регулирования давления | 2020 |
|
RU2744321C1 |
| Устройство управления пневматическим приводом вагонного замедлителя | 2017 |
|
RU2689468C2 |
| СИСТЕМА ПОДАЧИ ТОПЛИВА ДВИГАТЕЛЬНОЙ УСТАНОВКИ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2533592C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ СОДЕРЖАНИЯ КИСЛОРОДА В ПОМЕЩЕНИИ | 2020 |
|
RU2745853C1 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2758581C1 |
Изобретение используется для автоматического поддержания заданного состава газовой среды в герметичных контейнерах, например в химических реакторах, в которых происходит каталитическое окисление водорода кислородом воздуха. Изобретение направлено на обеспечение возможности управления динамикой естественной вентиляции в таких контейнерах, обеспечение регулируемого притока кислорода из воздуха в них, что обеспечивается за счет того, что система управления согласно изобретению содержит блок управления, который включает источник электропитания, аналого-цифровой преобразователь информационных и силовых управляющих сигналов в виде блока преобразования интерфейсов, датчики, средства коммутации информационных и силовых управляющих сигналов в виде блока ввода-вывода интерфейсов, электрически связанные с цифровым электронно-вычислительным устройством и подключенные к электроприводам регулируемых рабочих органов исполнительных устройств, составляющих систему исполнительных механизмов, электроприводы регулируемых рабочих органов группы исполнительных устройств, пневмомагистрали, соединяющие датчики с исполнительными механизмами и с герметичным контейнером. При этом в качестве исполнительных устройств используются электропневмоклапаны, размещенные по одному в пневмомагистралях, связывающих их с герметичным контейнером. В одной пневмомагистрали электропневмоклапан соединен дополнительно с датчиком кислорода, а в другой - с фильтром, сообщающимся с внешней средой. Электропневмоклапаны имеют прямые и обратные электрические связи с блоком управления по цепям управления и питания для управления изменением положения рабочих органов электропневмоклапанов. 2 н. и 4 з.п. ф-лы, 1 ил.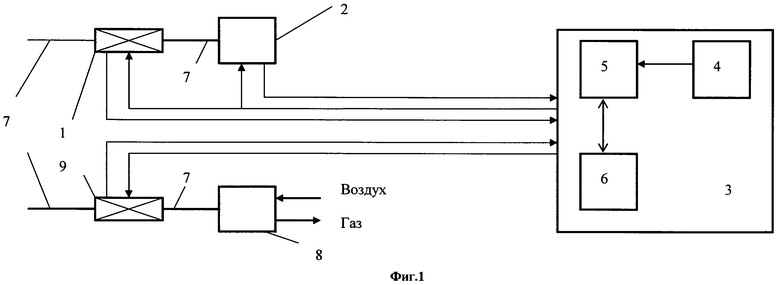
1. Автоматизированная система управления динамикой естественной вентиляции в герметичном контейнере, содержащая блок управления, сформированный по заранее заданному алгоритму, построенному на логической связи электрических параметров элементов автоматизированной системы, который включает источник электропитания, аналого-цифровой преобразователь информационных и силовых управляющих сигналов в виде блока преобразования интерфейсов, датчики, регистрирующие параметры автоматизированной системы, средства коммутации информационных и силовых управляющих сигналов в виде блока ввода-вывода интерфейсов, электрически связанные с цифровым электронно-вычислительным устройством и подключенные к электроприводам регулируемых рабочих органов исполнительных устройств, составляющих систему исполнительных механизмов, собственно исполнительные устройства и электроприводы регулируемых рабочих органов группы исполнительных устройств, пневмомагистрали, соединяющие датчики с исполнительными механизмами и с герметичным контейнером, отличающаяся тем, что в качестве исполнительных устройств автоматизированная система содержит электропневмоклапаны, размещенные по одному в пневмомагистралях, связывающих их с герметичным контейнером, при этом в одной пневмомагистрали электропневмоклапан соединен дополнительно с датчиком кислорода, а в другой - с фильтром, сообщающимся с внешней средой, и имеет прямые и обратные электрические связи с блоком управления по цепям управления и питания для управления изменением положения рабочих органов электропневмоклапанов, в герметичном контейнере дополнительно размещены источники водорода и других газов, поглотители газообразных продуктов процесса каталитического окисления водорода и других газов.
2. Автоматизированная система управления динамикой естественной вентиляции в герметичном контейнере по п.1, отличающаяся тем, что, с целью обеспечения возможности управления динамикой естественной вентиляции в нескольких герметичных контейнерах, она содержит заданное число пневмомагистралей с электропневмоклапанами, подключенных к соответствующему числу герметичных контейнеров и к блоку управления через многоканальный блок ввода-вывода интерфейсов.
3. Автоматизированная система управления динамикой естественной вентиляции в герметичном контейнере по п.1, отличающаяся тем, что, с целью упрощения конструкции и регулирования процесса газообмена, в качестве исполнительного устройства она содержит дополнительно в каждой пневмомагистрали электропневмодроссели, соединенные с электропневмоклапанами.
4. Автоматизированная система управления динамикой естественной вентиляции в герметичном контейнере по п.1, отличающаяся тем, что, с целью обеспечения возможности контролирования изменения концентрации водорода, она содержит датчик водорода, совмещенный с датчиком кислорода в едином аналитическом блоке.
5. Автоматизированная система управления динамикой естественной вентиляции в герметичном контейнере по п.1, отличающаяся тем, что, с целью оперативного отключения автоматизированной системы от пневмомагистралей с электропневмоклапанами, в каждой пневмомагистрали между блоком управления и электропневмоклапанами установлены по одному электрорезаку.
6. Способ задействования автоматизированной системы управления динамикой естественной вентиляции в герметичном контейнере по п.1, включающий формирование управляющего сигнала для приведения в действие исполнительных устройств и формирования и коммутации информационных сигналов и управляющих команд, отличающийся тем, что, с целью обеспечения возможности управления динамикой естественной вентиляции в герметичном контейнере, в котором происходит каталитическое окисление водорода кислородом воздуха, для обеспечения регулируемого притока кислорода в указанный контейнер для поддержания заданной концентрации кислорода за счет обеспечения возможности приведения системы в исходное положение, производят с использованием блока управления, сформированного по заранее заданному алгоритму, построенному на логической связи электрических параметров элементов автоматизированной системы, характеризующих начальные, конечные и промежуточные их положения, периодичность опроса датчиков, результаты измерения концентрации кислорода, посредством которых проводят аппроксимацию показаний датчика одной из трех функциональных зависимостей содержания кислорода в герметичном контейнере от времени (линейной, полиноминальной, экспоненциальной), заложенных в алгоритм, с последующим определением путем интерполяции указанной зависимости промежутка времени, за который произойдет допустимый расход кислорода, и передачи сформированного управляющего сигнала по интерфейсу на соответствующее открытие электроприводом электропневмоклапана в пневмомагистрали, связывающей его с фильтром для запуска кислорода из воздуха в герметичный контейнер, компенсирующий расход кислорода, или закрытие электропневмоклапана в пневмомагистрали, связывающей его с фильтром, по завершении процесса газообмена для измерения датчиком текущей концентрации кислорода в герметичном контейнере, результаты этих измерений фиксируются в памяти блока управления, затем передаются по интерфейсу на электропривод исполнительных устройств с возможностью доведения величины концентрации кислорода в герметичном контейнере до уровня номинальной.
| СИСТЕМА КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ЗАЩИТНОЙ ОБОЛОЧКИ СУДОВОЙ ЯЭУ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ | 1998 |
|
RU2151383C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ УТЕЧКИ ТЕКУЩИХ СРЕД И ТРЕВОЖНОГО ОПОВЕЩЕНИЯ | 2008 |
|
RU2358252C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОЗДУХОНЕПРОНИЦАЕМОСТИ ЗАМКНУТЫХ ПРОСТРАНСТВ | 2007 |
|
RU2419077C2 |
| JP 63214635 А, 07.09.1988 | |||
| US 2007033987 A1, 15.02.2007. | |||

