фиг.1
системы. Система управления содержит педаль 1, средняя часть которой шарнирно закреплена на полу кабины водителя. Один конец педали кинематически связан с датчиком системы управления скоростью движения транспортного средства, а другой - с датчиком 2, сигнализирующим о начале процесса торможения, и датчиком 3 системы управления торможением. Датчики 2 и 3 линиями связи соединены через стыковочное устройство 4 с электронным блоком 5 управления. Электронный блок 5 управления также соединен через стыковочное устройство 4 с датчиками 6-10, регистрирующими соответственно реальное замедление транспортного средства, давление в управляющей полости А модулятора 11, частоту вращения коленчатого вала двигателя внутреннего сгорания, включение-выключение сцепления и нейтральное положение в
коробке передач, и через блок 12 усилителей - с соленоидами электропневматических клапанов 13-18 управления соответственно моторным тормозом, сцеплением, рейкой подачи топлива насоса высокого давления, подачей воздуха из ресивера 19 в электропневмопривод рабочей тормозной системы, выдержкой и выпуском сжатого воздуха в управляющей полости А модулятора 11. Полость Б модулятора посредством магистрали 23 сообщена с тормозными камерами 24. 2 з.п. ф-лы, 3 ил.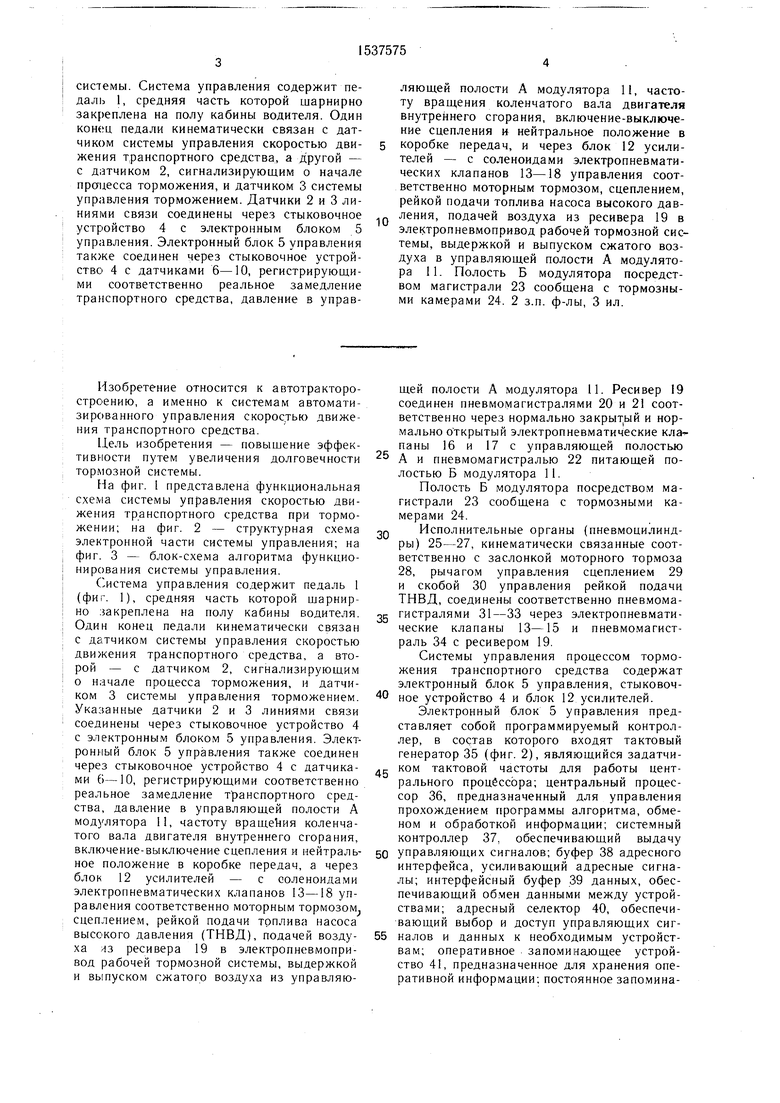




| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АКТИВНОЙ ЗАЩИТЫ ОТ ЮЗА КОЛЁСНЫХ ПАР ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2200102C2 |
| Двухпроводный электропневматический тормозной привод прицепа | 1988 |
|
SU1505814A1 |
| Электропневматический тормозной привод колеса транспортного средства | 1989 |
|
SU1676881A1 |
| Электропневматический тормозной привод транспортного средства большой грузоподъемности | 1990 |
|
SU1749086A1 |
| МОДУЛЯТОР ЭЛЕКТРОННОЙ ТОРМОЗНОЙ СИСТЕМЫ | 2005 |
|
RU2314217C2 |
| Электропневматическая противоблокировочная тормозная система транспортного средства | 1990 |
|
SU1710402A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ПРИВОДОМ МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2006 |
|
RU2327203C2 |
| Электропневматический тормозной привод транспортного средства | 1988 |
|
SU1594029A1 |
| Тормозной привод прицепного транспортного средства | 1987 |
|
SU1421575A1 |
| Электропневматическая тормозная система транспортного средства | 1983 |
|
SU1134438A2 |


Изобретение относится к автотракторостроению, а именно к системам автоматизированного управления скоростью движения транспортного средства. Целью изобретения является повышение эффективности путем увеличения долговечности тормозной системы. Система управления содержит педаль 1, средняя часть которой шарнирно закреплена на полу кабины водителя. Один конец педали кинематически связан с датчиком системы у а другой - с датчиком 2, сигнализирующим о начале процесса торможения, и датчиком 3 системы управления торможением. Датчики 2 и 3 линиями связи соединены через стыковочное устройство 4 с электронным блоком 5 управления. Электронный блок 5 управления также соединен через стыковочное устройство 4 с датчиками 6 - 10, регистрирующими соответственно реальное замедление транспортного средства, давление в управляющей полости А модулятора 11, частоту вращения коленчатого вала двигателя внутреннего сгорания, включение-выключение сцепления и нейтральное положение в коробке передач, и через блок 12 усилителей - с соленоидами электропневматических клапанов 13 - 18 управления, соответственно моторным тормозом, сцеплением, рейкой подачи топлива насоса высокого давления, подачей воздуха из ресивера 19 в электропневмопривод рабочей тормозной системы, выдержкой и выпуском сжатого воздуха в управляющей полости А модулятора 11. Полость Б модулятора посредством маги
Изобретение относится к автотракторостроению, а именно к системам автоматизированного управления скоростью движения транспортного средства.
Цель изобретения - повышение эффективности путем увеличения долговечности тормозной системы.
На фиг. 1 представлена функциональная схема системы управления скоростью движения транспортного средства при торможении; на фиг. 2 - структурная схема электронной части системы управления; на фиг. 3 - блок-схема алгоритма функционирования системы управления.
Система управления содержит педаль 1 (фиг. 1), средняя часть которой шарнирно закреплена на полу кабины водителя. Один конец педали кинематически связан с датчиком системы управления скоростью движения транспортного средства, а второй - с датчиком 2, сигнализирующим о начале процесса торможения, и датчиком 3 системы управления торможением. Указанные датчики 2 и 3 линиями связи соединены через стыковочное устройство 4 с электронным блоком 5 управления. Электронный блок 5 управления также соединен через стыковочное устройство 4 с датчиками 6-10, регистрирующими соответственно реальное замедление транспортного средства, давление в управляющей полости А модулятора 11, частоту вращения коленчатого вала двигателя внутреннего сгорания, включение-выключение сцепления и нейтральное положение в коробке передач, а через блок 12 усилителей - с соленоидами электропневматических клапанов 13-18 управления соответственно моторным тормозом сцеплением, рейкой подачи топлива насоса высокого давления (ТНВД), подачей воздуха из ресивера 19 в электропневмопривод рабочей тормозной системы, выдержкой и выпуском сжатого воздуха из управляющей полости А модулятора 11. Ресивер 19 соединен пневмомагистралями 20 и 2 соответственно через нормально закрытый и нормально открытый электропневматические клапаны 16 и 17 с управляющей полостью
А и пневмомагистралью 22 питающей полостью Б модулятора 11.
Полость Б модулятора посредством магистрали 23 сообщена с тормозными камерами 24.
Исполнительные органы (пневмоцилинд- ры) 25-27, кинематически связанные соответственно с заслонкой моторного тормоза 28, рычагом управления сцеплением 29 и скобой 30 управления рейкой подачи ТНВД, соединены соответственно пневмомагистралями 31-33 через электропневматические клапаны 13-15 и пневмомагист- раль 34 с ресивером 19
Системы управления процессом торможения транспортного средства содержат электронный блок 5 управления, стыковочное устройство 4 и блок 12 усилителей.
Электронный блок 5 управления представляет собой программируемый контроллер, в состав которого входят тактовый генератор 35 (фиг. 2), являющийся задатчиком тактовой частоты для работы цент.
рального процессора; центральный процессор 36, предназначенный для управления прохождением программы алгоритма, обменом и обработкой информации; системный контроллер 37. обеспечивающий выдачу
управляющих сигналов; буфер 38 адресного интерфейса, усиливающий адресные сигналы; интерфейсный буфер 39 данных, обеспечивающий обмен данными между устройствами; адресный селектор 40, обеспечивающий выбор и доступ управляющих сигналов и данных к необходимым устройствам; оперативное запоминающее устройство 41, предназначенное для хранения оперативной информации; постоянное запоминающее устройство 42, обеспечивающее хранение программы алгоритма; контроллер 43 прерываний, обеспечивающий прием информации с минимальными потерями времени; программируемый таймер 44, предназна- ценный для преобразования частотной информации в цифровой код; устройства 45 и 46 параллельного ввода-вывода, обеспечивающие обмен информацией с внешними устройствами; буферы данных ввода- вывода; буферы 50-52 данных информации, поступающей от внешних объектов (датчиков); буферы 53-55, обеспечивающие выдачу управляющих сигналов на стыковочное устройство 4; буфер 56, обеспечивающий ввод информации от датчиков 2,9 и 10; буфер 57, выполняющий передачу информации на блок 12 усилителей.
В состав стыковочного устройства 4 входят формирователи 58 и 59 входных сигналов, аналого-цифровые преобразователи 60-62.
Блок 12 усилителей представляет собой набор ключевых схем, обеспечивающих усиление сигналов, поступающих на исполнительные устройства (соленоиды электропневматических клапанов).
Функциональное соединение составных элементов электронной системы выполнено по следующей схеме (фиг. 2). Вход тактового генератора 35 линиями связи соединен с выходом системного контроллера 37, а выходом - с входом центрального процессе- ра 36 и входом системного контроллера 37. Выход центрального процессора 36 связан с входом буфера 38 адресного интерфейса. Центральный процессор 36 двухнаправ- ленными линиями связи соединен с системным контроллером 37 и интерфейсом бу- фером 39 данных. Вход буфера 38 адресного интерфейса соединен с системным контроллером 37, а выход - с входами адресного селектора 40, оперативного запоминающего устройства 41, постоянного запо- минающего устройства 42, контроллера 43 прерываний программируемого таймера 44 и устройств 45 и 4о ввода-вывода информации. Вход интерфейсного буфера 39 данных связан с выходом системного контроллера 37 и двухнаправленными линиями связи соединен с буферами 47-49 данных ввода-вывода. Вход адресного селектора 40 соединен с выходом системного контроллера 37, а выход - с входами буферов 47-49 данных, контроллера 43 прерываний, программируемого таймера 44 и уст- ройств 45 и 46 ввода-вывода, которые обеспечивают обмен информации с внешними объектами управления.
Вход оперативного запоминающего устройства 41 сообщен с выходом системно- го контроллера 37, а выход - с входом буфера 47 данных ввода-вывода. Вход буфера 49 данных соединен с выходом системного контроллера 37, а выход двухнаправленными линиями связи - с контроллером 43 прерываний, программируемым таймером 44 и устройствами 45 и t6 параллельного ввода-вывода информации. Вход постоянного запоминающего устройства 42 соединен с выходом системного контроллера 37, а выход - с входом буфера 48 данных. Выходы контроллера 43 прерываний, программируемого таймера 44, устройств 45 и 46 параллельного ввода-вывода сообщены линиями связи с выходом системного контроллера 37. Вход программируемого таймера 44 также соединен с выходом формирователя 58 входных сигналов, вход которого связан с выходом датчика 8 частоты вращения коленчатого вала двигателя.
Выходы датчиков 3, 6 и 7 соединены соответственно с входами аналого-цифровых преобразователей 60-62, информационные выходы которых сообщены соответственно с входами буферов 50-52 данных, а входы последних связаны с соответствующими каналами устройств 45 и 46 параллельного ввода-вывода информации. Входы аналого-цифровых преобразователей 60-62 также сообщены линиями связи с выходами соответствующих буферов 53-55 данных, входы которых соединены с каналами устройств 45 и 46 параллельного ввода-вывода.
Выходы датчиков 2, 9 и 10 соответственно начала процесса торможения, включения- выключения сцепления и нейтрального положения в коробке передач соединены с входами формирователя 59 входных сигналов, выходы которого связаны с входом буфера 56 данных, а его выходы - с каналом ввода информации устройства 46 параллельного ввода-вывода. Канал вывода этого устройства соединен с входами буфера 57 данных, выходы которого соединен с входами блока 12 усилителей, выходы последнего сообщены линиями связи с соленоидами электропневматических клапанов 13- 18.
На фиг. 3 представлена блок-схема алгоритма функционирования системы управления.
Блок 63. Ввод в электронный блок 5 управления сигналов от датчиков: 2 - начала процесса торможения; 3 - требуемого ja и 6 - реального ja замедлений транспортного средства; 7 - давления в управляющей полости А модулятора 11; 8 - частоты вращения коленчатого вала двигателя;
9- включения-выключения сцепления;
10- нейтрального положения в коробке передач.
Блок 64. Осуществляется проверка состояния датчика 2. Если контакты датчика 2 замкнуты (f/2-1), то запрещается переключение передач и осуществляется переход на блок 65, если нет, то происходит обесточивание всех электропневматических клапанов.
Блок 65. Сравниваются требуемое /з и реальное ja замедления транспортного средства. При осуществляется переход на блок 66, в противном случае - переход на следующий блок сравнения }а и /з.
Блок 66. Осуществляется проверка состояния коробки передач (датчик 10). Если передача включена, то переход на блок 67, если передача выключена, то подается команда на включение электропневматического клапана 16.
Блок 67. Проверяется состояние сцепления (датчик 9). Если сцепление замкнуто ((), то осуществляется переход на блрк 68, если нет, то подается команда на включение электропневматического клапана 16.
Блок 68. Осуществляется проверка наличия сигнала на электропневмоклапане 15, управляющего рейкой подачи топлива в ТНВД. Если сигнал не поступает (() и подача топлива не равна минимальной, то осуществляется переход к блоку 69, если нет, то проверяется наличие сигнала на электропневмоклапане 13.
Блок 69. Обеспечивается подача сигнала на включение электропневмоклапана 15 ((). Переход к блоку 70.
Блок 70. Сравнивается частота шдв вращения коленчатого вала двигателя с частотой сомин его вращения на холостом режиме. Если )чин, то осуществляется пе реход на блок 63, если нет - выполняется обесточивание электропневмоклапана 13.
Блок 71. Проверяется наличие сигнала на электропневмоклапане 13 моторного тормоза. Если моторный тормоз выключен ((), то осуществляется переход на блок 72, если нет - подается команда на включение электропневмоклапана 16.
Блок 72. Обеспечивается подача сигнала на включение электропневмоклапана 13 ((/1з 1). Переход на блок 70.
Блок 73. Выполняется обесточивание электропневмоклапана 13 (). Переход к бло-су 74.
Блок 74. Выполняется обесточивание электропневмоклапана 15 ((). Переход к блоку 75.
Блок 75. Обеспечивается подача команды на включение электропневматического клапана 14 ((/и ) Перевод к блоку 63.
Блок 76. Выполняется подача команды на включение электропневматического клапана 16 (() подачи сжатого воздуха из ресивера в модулятор 11. Переход на блок 77.
Блок 77. Происходит обесточивание электропневмоклапана 17, обеспечивающего выдержку давления в управляющей полости А модулятора 11 (). Переход к блоку 78.
Блок 78. Обесточивается электропневмоклапан 18 (() выпуска воздуха из управляющей полости А модулятора 11 в атмосферу. Переход к блоку 70.
Блок 79. Производится сравнение требуемого з и реального /„ замедлений транспортного средства. При осуществляется переход на блок 80, а если , выполняется проверка наличия сигнала на электропневматическом клапане 16.
Блок 80. Проверяется наличие сигнала на злектропневмоклапане 16, осуществляющего подачу сжатого воздуха из ресивера 19 в управляющую полость А модулятора 11. Если клапан включен ((), то осуществляется переход на блок 81, в противном случае выполняется проверка наличия сигнала на электропневмоклапане 13. Блок 81. Выполняется подача сигнала на включение электропневмоклапана 17 (() выдержки давления в управляющей полости А модулятора 11. Переход к блоку 82.
5
Блок 82. Обесточивается электропневмо- клапан 18 ((), обеспечивающий выпуск воздуха из управляющей лолости А модулятора 11 в атмосферу. Осуществляется переход на блок 70.
0 Блок 83. Выполняется проверка наличия сигнала на электропневмоклапане 13, управляющего моторным тормозом. При включенном состоянии (() клапана осуществляется переход на блок 70, в противном случае - на блок 84.
5 Блок 84. Осуществляется проверка наличия сигнала на электропневмоклапане 15, управляющего рейкой подачи топлива в ТНВД. Если электропневмоклапан включен ((), выполняется переход к блоку 70.
Ф Блок 85. Выполняется проверка наличия сигнала на электропневмоклапане 16, выполняющего подачу сжатого воздуха из ресивера 19 к модулятору 11. Если клапан включен ((), то осуществляется переход на блок 86, если нет ((), то
5 проверяется наличие сигнала на электропневмоклапане 13.
Блок 86. Выполняется подача сигнала на включение электропневмоклапана 17 (() выдержки давления сжатого воздуха в управляющей поЛости А модулятора
0 ц. Переход к блоку 87.
Блок 87. Обеспечивается подача сигнала на включение электропневматического клапана 18 (), выполняющего выпуск сжатого воздуха из управляющей
5 полости А модулятора 11 в атмосферу. Переход к блоку 88.
Блок 88. Проверяется наличие давления в управляющей полости А модулятоpa И. Если давление равно атмосферному ( 0), то осуществляется переход к блоку 89, если нет - на блок 70.
Блок 89. Обесточивается электропневмо- клапан 16 (), обеспечивающий подачу сжатого воздуха на вход модулятора 11.
Блок 90. Обесточивается электропневмо- клапан 17 (), обеспечивающий выдержку давления в управляющей полости А модулятора 11. Выполняется переход к блоку 91.
Блок 91. Обесточивается электропневмо- клапан 18 (t/ig-0), обеспечивающий выпуск сжатого воздуха из управляющей полости А модулятора 11 в атмосферу. Переход к блоку 70.
Блок 92. Выполняется проверка наличия сигналов на электропневмоклапане 13, управляющего моторным тормозом. Если клапан включен (), то осуществляется переход к блоку 93, если нет (), то переход к блоку 94.
Блок 93. Обесточивается электропневмо- клапан 13 (), управляющий моторным тормозом. Выполняется переход к блоку 70.
Блок 94. Выполняется проверка наличия сигнала на электропневмоклапане 15, управляющего рейкой подачи топлива в ТНВД. Если клапан включен (), то происходит переход на блок 95, если нет (L/-,), то переход к блоку 70.
Блок 95. Обесточивается электропневмо- клапан 15 (), управляющий рейкой подачи топлива в ТНВД. Выполняется переход к блоку 70.
Блок 96. Обесточиваются все электропневматические клапаны ( Ј/м-0; ( ) и управление передается к системе автоматизированного управления трансмиссией.
Система управления скоростью движения транспортного средства при торможении работает следующим образом.
Работу системы управления торможением рассмотрим на примере торможения двигателем, моторным тормозом и одним из раздельных контуров рабочей тормозной системы. В электронный блок 5 управления поступают сигналы через стыковочное устройство 4 от датчиков 2, 3 и 6-10 соответственно начала процесса торможения, требуемого замедления, реального замедления транспортного средства, давления в управляющей полости А модулятора 11, частоты вращения коленчатого вала двигателя, включения-выключения сцепления и нейтрали в коробке передач.
При воздействии водителя на конец педали 1, связанной с системой торможения, датчик 2 замыкается и измененные сигналы от датчиков 2 и 3, информирующие соответственно о начале процесса
торможения и величине перемещения педали, т. е. о величине требуемого замедления з, поступают через стыковочное устройство 4 в электронный бло,с 5 управления. Последний анализирует сигналы, поступающие от датчиков 2, 3 и 6-10 и сравнивает требуемое замедление з, заданное перемещением педали 1, с реальным замедлением /а, поступающим от датчика 6
Q замедления, установленного на транспортном средстве. Если реальное замедление ja меньше заданного /, то электронный блок 5 управления анализирует состояние сцепления (включено или выключено) и коробки передач (нейтральное положение или
5 включена передача), то положения которых зависит передача крутящего момента от двигателя к трансмиссии, и в зависимости от этого электронный блок управления подает команду на включение вспомоQ гательной или рабочей тормозной системы.
В том случае, когда осуществляется передача крутящего момента от двигателя к трансмиссии, электронный блок 5 управления через блок 12 усилителей подает ко5 манду на включение электропневматического клапана 15, соединяющего ресивер 19 через пневмомагистрали 33 и 34 с пневмо- цилиндром 27, кинематически связанным со скобой 30 управления подачей топлива.
Подача топлива при этом прекращается и происходит торможение двигателем. В процессе торможения двигателем электронный блок 5 управления сравнивает текущую частоту и)дв вращения вала двигателя с частотой о)«ин его вращения на холостом ре жиме, и если выполняется условие шдв сомин, то электронный блок управления производит повторный анализ (опрос) текущих значений сигналов от датчиков 2, 3 и 6-10, информирующих о состоянии объектов управления и реальном замедлении транспорт0 ного средства. Если реальное замедление /а равно заданному /з, то процесс торможения продолжается двигателем.
При необходимости увеличения реального замедления }а электронный блок 5 управления дополнительно подает команду че- рез блок 12 усилителей на включение электропневматического клапана 13, сообщающего ресивер 19 через пневмомагистрали 34 и 31 с пневмоцилиндром 25, кинематически связанным с заслонкой мотор0 ного тормоза 28, и включает его в работу. При этом происходит торможение моторным тормозом. Если реальное замедление /а транспортного средства равно заданному }з, то процесс торможения продолжается моторным тормозом. В случае, когда
5 реальное замедление /а при торможении моторным тормозом меньше заданного }s, то включается в работу рабочая тормозная система. Электронный блок 5 управления
через блок 12 усилителей дополнительно подает команду на включение электропневматического клапана 16, сообщающего ресивер 19 через лневмомагистрали 20 и 21 и нормально открытый электропневматический клапан 17 с управляющей полостью А модулятора 11. Последний срабатывает и сжатый воздух из ресивера 19 через пневмомагистрали 20 и 22, питающую полость Б модулятора 11 и магистраль 23 поступает в тормозные камеры 24. Происходит совместное торможение моторным тормозом и рабочей тормозной системой.
При достижении заданного замедления з электронный блок 5 управления подает команду на включение электропневматического клапана 17, перекрывающего сообщение ресивера 19 с управляющей полостью А модулятора 11. В этом случае давление в полости А и тормозных камерах 24 выдерживается постоянным, что позволяет поддерживать реальное замедление транспортного средства на заданном уровне. При это1У текущая частота содв вращения коленчатого вала двигателя сравнивается с минимальной частотой «мин, соответствующей его работе на холостом режиме. Если , то подается команда электронным блоком управления на выключение моторного тормоза, размыкание сцепления и на возвращение скобы 30 управления рейкой подача топлива в положение, соответствующее работе двигателя на холостом режиме. В этом случае дальнейшее торможение осуществляется рабочей тормозной системой.
Если происходит совместное торможение моторным тормозом и рабочей тормозной системой и реальное замедление / „ становится больше заданного /а, то электронный блок 5 управления через блок 12 усилителей подает команду, на включение электропневматического клапана 18, сообщающего управляющую полость А модуля- торз 11 с атмосферой. При этом происходит уменьшение давления в тормозных камерах 24 и соответственно уменьшается реальное замедление /а транспортного средства.- Следящее действие модулятора 11 в saBt-симости от величины перемещения педали 1, контролируемого датчиком 3, обеспечивается электронным блоком 5 управления путем подачи сигналов на включение или выключение электропневматич«ских клапанов 17 и 18, сообщающих управляющую полость А с ресивером 19 или атмосферой.
В случае, когда давление в управляющей полости А модулятора 1J, регистрируемого датчиком 7, достигает атмосферного, электронный блок 5 управления подает команду на выключение рабочей тормозной системы (обесточиваются соленоиды электропневматических клапанов 16-18).
Если рабочая тормозная система выключена, а реальное замедление ja транспорт 0
ного средства остается больше заданного /з, то осуществляется выключение моторного тормоза 28 и дальнейшее торможение осуществляется двигателем. В этом
случае электронный блок 5 управления обесточивает электропневматический клапан 13 и сжатый воздух из пневмоцилиндра 25 по пневмомагистрали 31 через электропневматический клапан 13 выходит в атмосферу. При этом текущая частота содв вращения вала двигателя сравнивается с минимальной частотой сомин, соответствующей его работе на холостом режиме. Если содв сомин, то снимается команда электронным блоком 5 управления с электропневматического клапана 15, который выпускает сжатый воздух из пневмоцилиндра 27 по пневмомагистрали 33 в атмосферу. При этом скоба 30, кинематически связанная с рейкой топливного насоса высокого давления, возвращается в положение, соответствующее работе двигателя на холостом режиме, и торможение двигателем прекращается.
При резком перемещении тормозной педали до положения, соответствующего определенному замедлению транспортного сред5 ства, происходит сразу включение ЭБУ тех систем, которые обеспечивают заданное замедление.
Если передача в коробке передач не включена или выключено (разомкнуто) сцепление, т. е. крутящий момент от дви0 гателя не передается к трансмиссии, то при воздействии на педаль 1 торможение происходит только рабочей тормозной системой. Включение в действие рабочей тормозной системы в зависимости от величины перемещения педали 1 происходит аналогично,
5 как и при передаче крутящего момента от двигателя к трансмиссии, как было описано.
При размыкании контактов- датчика 2, т. е. по прекращении процесса торможения,
Q электронный блок 5 управления обесточивает соленоиды электропневматических клапанов 13-18 и происходит переход на программу системы автоматизированного управления трансмиссией транспортного средства.
5
Формула изобретения
0 через четырехлинейный и одинарный защитные клапаны сообщенные пневмомагистра- лями с- ресиверами раздельных контуров тормозного привода тягача и прицепа, тормозные камеры, соединенные с ресивера5 ми через модуляторы давления с управлением от электронного блока, при этом последний связан с подпедальным задатчиком, датчиками системы управления скоростью
13
движения транспортного средства, например датчиками осевой нагрузки и угловой скорости колес, ручной тормозной кран управления стояночной тормозной системой, соединенной с ресивером и через ускорительный клапан - с энергоаккумуляторами тормозных камер, отличающаяся тем, что, с целью повышения эффективности путем увеличения долговечности тормозной системы, она снабжена дополнительной подсистемой автоматизированного управления процессом торможения двигателем, моторным тормозом и рабочей тормозной системой, которая включает в себя датчик начала процесса торможения, датчик системы управления торможением, стыковочные устройства, датчик регистрации реального замедления транспортного средства, датчик давления управляющей полости модулятора, датчик частоты вращения коленчатого вала двигателя, датчик включения-выключения сцепления, датчик нейтрального положения коробки передач, электропневматические клапаны управления моторным тормозом, сцеплением, рейкой подачи топлива насоса высокого давления, подачей воздуха из ресивера в электропневмопривод рабочей тормозной системы, выдержкой и выпуском сжатого воздуха из управляющей полости модулятора, нормально открытый и нормально закрытый клапаны с управляющей полостью, одной педалью управления, средняя часть которой закреплена на полу кабины водителя, один конец педали матически связан с датчиком системы управления скоростью движения транспортного средства, второй - с датчиком начала процесса торможения и датчиком системы управления торможением, которые соединены через стыковочное устройство с электронным блоком управления, последний соединен через соответствующее стыковочное устройство с датчиком реального замедления транспортного средства, датчиком давления управляющей полости модулятора, датчиком частоты вращения коленчатого вала двигателя, датчиком включения-выключения сцепления, датчиком нейтрального положения коробки передач, и через блок усилителей - с соленоидами электропневматических клапанов управления моторным тормозом, сцеплением, рейкой подачи топлива насоса высокого -давления, пддачей воздуха из ресивера в электропневмопривод рабочей тор мозной системы, выдержкой и выпуском сжатого воздуха из управляющей полости модулятора, ресивер сообщен пневмомагистралями через нормально открытый и нормально закрытый клапаны с управляющей полостью и пневмомагист- ралью - с питающей полостью модулятора, сообщенного с тормозными камерами, ис14
0
полнительные органы, кинематически связанные с заслонкой моторного тормоза, рычагом управления сцеплением, рейкой подачи топлива насоса высокого давления, сообщены
пневмомагистралями через электропневматические клапаны с ресивером.
сигналов датчика начала процесса торможения, датчика включения-выключения сцепления, датчика нейтрального положения коробки передач, аналого-цифровые преобразователи сигналов датчиков системы управления торможением, реального замедления,
5 давления управляющей полости модулятора.
3 Система управления по п. 1, отличающаяся тем, что она дополнительно снабжена электронным блоком управления, включающим программируемый контроллер, в состав которого входят тактовый генератор, соединенный с системным контроллером и центральным процессором, который связан с буфером адресного интерфейса,
5 буфером данных и системным контроллером, буфер адресного интерфейса соединен с адресным селектором, оперативным запоминающим устройством, постоянным запоминающим устройством,контроллером прерываний, программируемым таймером и уст0 ройством ввода-вывода информации, причем оперативное запоминающее устройство и постоянное запоминающее устройство связаны через соответствующие буферы данных с буфером интерфейса данных, контроллер прерываний, программируемый таймер и уст5 ройство ввода-вывода информации соединены через соответствующий буфер с буфером интерфейса данных, системный контроллер связан с буфером адресного интерфейса, с адресным селектором, буфером интер0 фейса данных, оперативным запоминающим устройством, постоянным запоминающим устройством и их буферами данных, контроллером прерываний, программируемым таймером, устройствами ввода-вывода информации, буфером данных этих устройств, и
5 буфером интерфейса данных, причем адресный селектор соединен с буфером данных оперативного запоминающего устройства, постоянного запоминающего устройства, устройства ввода-вывода информации, а также связан. с контроллером прерываний,
0 программируемым таймером и устройствами ввода-вывода информации, программируемый таймер соединен с контроллером прерываний, устройство ввода-вывода информации - со стыковочным устройством
s через буферы данных ввода-вывода информации.
Фие.2
DDDI
10 131415161718
и о, ин - 0
% О, О
Un o,Utt 0

| Автомобильная промышленность | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
