Изобретение относится к захвату, в частности к захвату Бернулли, для бесконтактного приема плоскостных элементов таких, как, например, кремниевые полупроводниковые пластины, с зажимным кольцом, соединенным с управляемой рукой робота, с соединенной с зажимным кольцом посредством воронкообразного конструктивного элемента ударной шайбой с захватной поверхностью, сообщающейся с проходящей через воронкообразный конструктивный элемент и ударную шайбу поточной системой, посредством которой после подачи на захват Бернулли избыточного давления у захватной поверхности ударной шайбы поршня должно создаваться разрежение для присоса захватываемой полупроводниковой пластины, с интегрированной в захватную поверхность прорезиненной установочной поверхностью опорного кольца, посредством которой осуществляется бесскользящее перемещение полупроводниковой пластины, присосанной к захватной поверхности, и с датчиком для распознавания полупроводниковой пластины, присосанной к захватной поверхности.
В автоматизированном производстве хрупких кремниевых полупроводниковых пластин или солнечных элементов для решения разнообразных задач по манипулированию известно, например, использование захватных систем с захватами, основанными на принципе Бернулли, посредством которых благодаря созданию разрежения у захватной поверхности захвата возможен бесконтактный прием отдельных полупроводниковых пластин в текущем положении. Однако при этом в качестве источника опасности повреждения полупроводниковых пластин оказалось обусловленное присосом незаторможенное столкновение соответствующей захватываемой полупроводниковой пластины с захватной поверхностью захвата.
Поэтому в основу настоящего изобретения положена задача создания захвата вышеупомянутого типа, с помощью которого для уменьшения брака при бесконтактном приеме плоскостных элементов таких, как, например, кремниевые полупроводниковые пластины, возможен исключительно щадящий в отношении удара подход (приближение) захватываемой полупроводниковой пластины к захватной поверхности захвата.
Эта задача согласно изобретению решается с помощью адаптированного к захвату по периметру амортизирующего устройства, контур которого, если смотреть на захват сверху, выходит по периметру за пределы контура последнего и которое создает для захватываемой полупроводниковой пластины при ее обусловленном присосом к захватной поверхности подходе такое амортизирующее сопротивление, что полупроводниковая пластина входит в контакт с прорезиненной установочной поверхностью опорного кольца щадящим в отношении удара образом.
Амортизирующее устройство захвата, предпочтительно, образовано щеткой с упругими щетинками, которые, если смотреть на захват сбоку, выступают на определенную величину над всеми прочими элементами захвата и создают, для захватываемой полупроводниковой пластины при обусловленном присосом к захватной поверхности подходе в качестве первого контакта, амортизирующее сопротивление. Концы щетинок, противоположные свободно проходящим концам щетинок, могут быть закреплены по окружной кромке для щетинок, удерживаемой в окружном зажимном пазу захвата с возможностью замены, образуемом зажимным кольцом и воронкообразным конструктивным элементом.
Возможно также выполнение амортизирующего устройства захвата в виде круглой пленочной заготовки из пластмассы с отделенными друг от друга шлицами упругими пластинками, радиально направленными от ее периметра внутрь, обеспечивающими необходимую амортизацию при обусловленном присосом подходе захватываемого плоскостного элемента. Возможны также эквивалентные варианты осуществления.
Если смотреть на захват сверху, контур захватной поверхности ударной шайбы и контур щетки, предпочтительно, являются круговыми, а ударная шайба и щетка установлены коаксиально оси захвата. Кроме того, упругие щетинки щетки, если смотреть на захват сверху, образуют открытое круглое кольцо примерно 340°, причем кольцевой участок щетки без щетинок пространственно относится к емкостному датчику для распознавания присосанной полупроводниковой пластины. Щетинки щетки могут быть также наклонены вниз относительно плоскости захватной поверхности ударной шайбы под углом 16,5±1°, причем определенная величина, на которую упругие щетинки щетки, если смотреть на захват сбоку, превышают все прочие конструктивные элементы захвата, располагается в диапазоне 1,5-3,5 мм. Все упругие щетинки щетки состоят, предпочтительно, из полиамида.
Захват согласно изобретению способствует тому, что присосанная полупроводниковая пластина в любом случае сначала входит в контакт с упругими щетинками щетки и тем самым при обусловленном присосом к захватной поверхности подходе захвата, так сказать, аккуратно амортизируется механическим путем, а затем щадящим в отношении удара образом приводится в контакт с прорезиненной установочной поверхностью опорного кольца. При этом не имеет значения, располагается плоскостной конструктивный элемент параллельно прорезиненной установочной поверхности или нет, более того, в любом случае опасность повреждения хрупких полупроводниковых пластин при манипулировании ими уменьшается, а количество брака среди них тем самым значительно сокращается. Прорезиненная установочная поверхность обеспечивает трение между захватываемой полупроводниковой пластиной и захватной поверхностью захвата, необходимое для быстрого перемещения в сторону.
Амортизирующее устройство захвата, адаптированное к последнему по периметру и выходящее за пределы окружного контура захвата, предпочтительным образом может быть также замкнутым резиновым кольцом в виде уплотнительной кромки из соответствующего упругого очень мягкого материала, посредством которого полупроводниковая пластина при своем обусловленном присосом прилегании к прорезиненной установочной поверхности опорного кольца, интегрированной в захватную поверхность, герметично уплотнена по периметру относительно ударной шайбы, через который проходит поточная система потоков. При этом варианте выполнения режим работы захвата Бернулли непосредственно после обусловленного присосом прилегания полупроводниковой пластины к прорезиненной опорной поверхности путем включения вакуумного насоса, подсоединенного к воздуховоду поточной системы, следует переключить на режим вакуумирования, в то время как второй воздуховод поточной системы, по которому подавался воздух для создания разности давлений для присоса полупроводниковой пластины, отключается. Когда захват Бернулли присасывает полупроводниковую пластину, резиновое кольцо типа уплотнительной кромки стягивается и образует в комплекте с полупроводниковой пластиной уплотнительный контур. Внутри уплотнительного контура может создаваться вакуум так, что полупроводниковая пластина под действием наружного атмосферного давления прижимается к прорезиненной установочной поверхности и удерживается без скольжения. Таким образом, расход воздуха для надежного удержания полупроводниковой пластины на прорезиненной установочной поверхности опорного кольца может значительно сокращаться.
Далее предпочтительный вариант выполнения захвата согласно изобретению описывается со ссылкой на чертежи, на которых:
фиг.1 изображает вид сбоку схематически показанного захвата Бернулли с захватываемой полупроводниковой пластиной в разрезе,
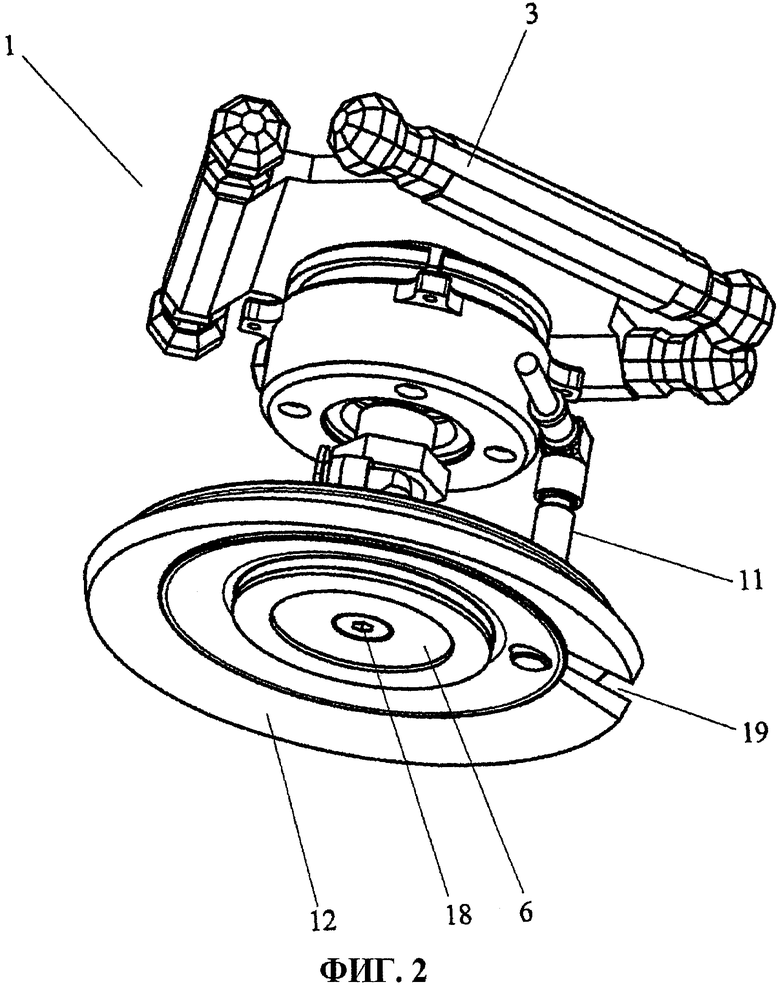
фиг.2 - вид захвата Бернулли снизу в перспективе без захватываемой полупроводниковой пластины,
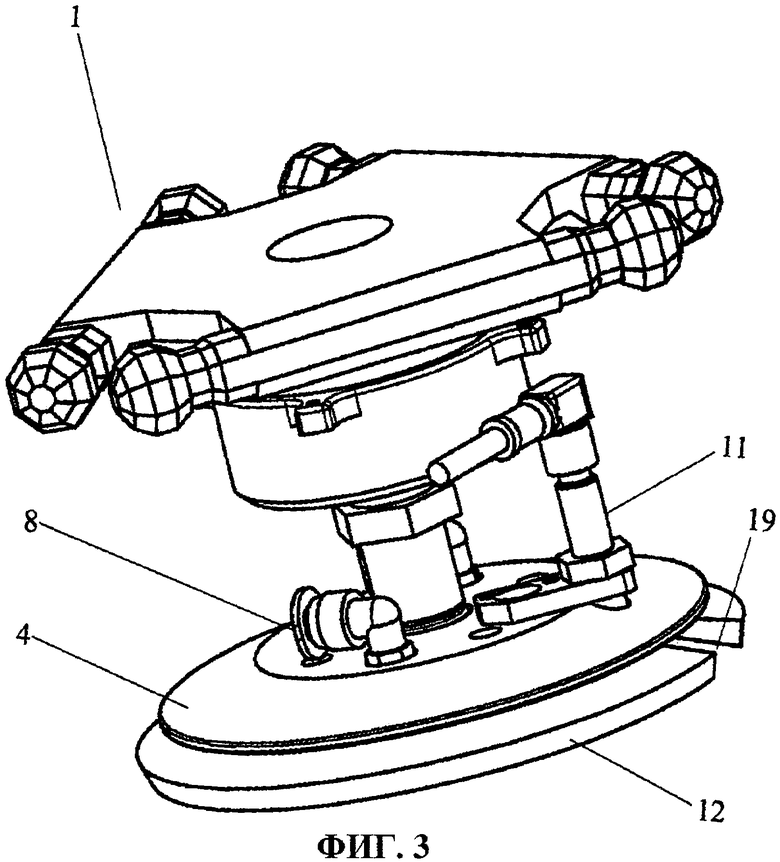
фиг.3 - вид захвата Бернулли сверху в перспективе без захватываемой полупроводниковой пластины и
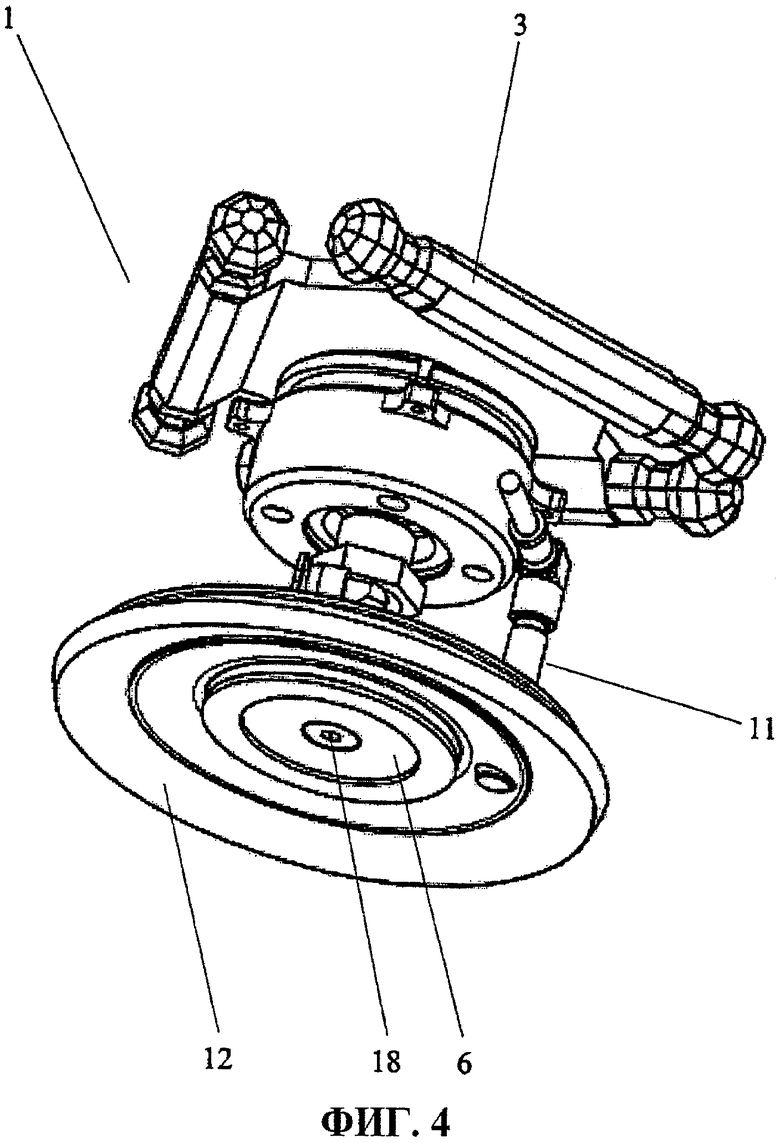
фиг.4 - вид захвата Бернулли в соответствии с фиг.2 в перспективе, причем, однако, амортизирующее устройство захвата образовано замкнутым резиновым кольцом.
Как видно на фиг.1-3, захват 1 Бернулли для бесконтактного захватывания плоскостных элементов таких, как, например, кремниевые полупроводниковые пластины 2, состоит по существу из зажимного кольца 4, соединенного по меньшей мере с одной управляемой рукой 3 робота, ударной шайбы 6, соединенного с зажимным кольцом 4 с помощью воронкообразного конструктивного элемента 5 и содержащего захватную поверхность 7, в которую интегрирована прорезиненная установочная поверхность 9 опорного кольца 10, проходящий через воронкообразный конструктивный элемент 5 и ударная шайба 6 поточной системы 8, сообщающейся с захватной поверхностью 7 захвата 1, амортизирующего устройства 12 в виде щетки с упругими щетинками 19, адаптированного к захвату 1 по периметру, и емкостного датчика 7 для распознавания полупроводниковой пластины 2, захватываемой захватом 1.
При подаче на захват 1 Бернулли избыточного давления с помощью поточной системы 8 у захватной поверхности 7 ударной шайбы 6 благодаря полученной разности давлений создается разрежение для присоса захватываемой полупроводниковой пластины 2. Поскольку, как лучше всего показано на фиг.1, ударная шайба 6 и щетка 12, образующая амортизирующее устройство, установлены коаксиально продольной оси 18 захвата 1, а круговой контур щетки, если смотреть на захват 1 сверху, выходит по периметру за пределы контура последнего и тем самым круговой захватной поверхности 7 ударной шайбы 6, захватываемая полупроводниковая пластина 2 при обусловленном присосом к захватной поверхности 7 подходе в любом случае сначала входит в контакт с упругими щетинками 13 щетки 12, выступающими, если смотреть на захват 1 сбоку, над зажимным кольцом 4, воронкообразным конструктивным элементом 5 и ударной шайбой 6 захвата 1 на величину в диапазоне 1,5-3,5 мм. Щетинки 13 щетки 12 захвата 1, которые согласно фиг.1 могут быть наклонены внизу относительно плоскости захватной поверхности 7 ударной шайбы 6 под углом 16,5±1°, оказывают обусловленному присосом подходу полупроводниковой пластины 2 такое амортизирующее сопротивление, что последняя входит в контакт с прорезиненной установочной поверхностью 9 опорного кольца 10 щадящим в отношении удара образом. Следовательно, опасность разрушения полупроводниковой пластины 2 значительно снижается механическим и вместе с тем энергосберегающим способом.
Кроме того, как видно на фиг.1, концы 15 щетинок, противоположные свободно проходящим концам 14 щетинок, закреплены по периметру кромки 16 для щетинок, удерживаемой с возможностью замены в окружном зажимном пазу 17 захвата 1, образованном зажимным кольцом 4 и воронкообразным конструктивным элементом 5. Таким образом, при необходимости, возможна соответствующая замена амортизирующего устройства в соответствии с площадью захватываемой полупроводниковой пластины 2.
На фиг.2 и 3 показано, что в изображенном варианте выполнения захвата 1 упругие щетинки 13 щетки 12, если смотреть на захват 1 сверху, образуют открытое круглое кольцо примерно 340°, причем кольцевой участок 19 щетки 12 без щетинок пространственно относится к емкостному датчику 11 для распознавания присосанной полупроводниковой пластины 2.
Согласно фиг.4 амортизирующее устройство 12 захвата 1, адаптированное к последнему по периметру и выходящее за пределы окружного контура захвата 1, образовано замкнутым резиновым кольцом в виде уплотнительной кромки из соответствующего очень мягкого материала, посредством которого полупроводниковая пластина 2 при своем обусловленном присосом прилегании к прорезиненной установочной поверхности 9 опорного кольца 10, интегрированной в захватную поверхность 7, герметично уплотнена по периметру относительно ударной шайбы, через которую проходит поточная система 8. Режим работы захвата 1 Бернулли непосредственно после обусловленного присосом прилегания полупроводниковой пластины 2 к прорезиненной опорной поверхности 9 опорного кольца 10 путем включения вакуумного насоса, подсоединенного к воздуховоду поточной системы 8, следует переключить на режим вакуумирования, в то время как второй воздуховод поточной системы 8, по которому подавался воздух для создания разности давлений для присоса полупроводниковой пластины 2, отключается. Когда захват 1 Бернулли присасывает полупроводниковую пластину 2, резиновое кольцо 12 в виде уплотнительной кромки стягивается и образует в комплекте с полупроводниковой пластиной 2 уплотнительный контур. Внутри уплотнительного контура может создаваться вакуум так, что полупроводниковая пластина 2 под действием наружного атмосферного давления прижимается к прорезиненной установочной поверхности 9 и удерживается без скольжения. Таким образом, расход воздуха для надежного удержания полупроводниковой пластины 2 на прорезиненной установочной поверхности 9 опорного кольца 10 значительно сокращается.
Перечень позиций
1 - захват Бернулли
2 - плоскостной элемент, полупроводниковая пластина
3 - рука робота
4 - зажимное кольцо
5 - воронкообразный конструктивный элемент
6 - ударная шайба
7 - захватная поверхность
8 - поточная система
9 - прорезиненная установочная поверхность
10 - опорное кольцо
11 - датчик
12 - амортизирующее устройство, щетка, резиновое кольцо
13 - щетинки
14 - свободно проходящие концы щетинок
15 - фиксированные концы щетинок
16 - кромка для щетинок
17 - зажимный паз
18 - продольная ось захвата
19 - кольцевой участок щетки без щетинок
d - определенная величина
Изобретение относится к захвату, в частности захвату Бернулли, для приема плоскостных элементов, например, кремниевых полупроводниковых пластин, с обеспечением низкой нагрузки на них. Захват содержит зажимное кольцо, соединенное с управляемой рукой робота, соединенную с зажимным кольцом ударную шайбу с захватной поверхностью, сообщающейся с поточной системой, посредством которой после подачи на захват Бернулли избыточного давления у захватной поверхности ударной шайбы создается разрежение для присоса захватываемой полупроводниковой пластины. Захват также содержит интегрированную в захватную поверхность прорезиненную установочную поверхность опорного кольца для осуществления бесскользящего перемещения полупроводниковой пластины, присосанной к захватной поверхности, и емкостной датчик для распознавания полупроводниковой пластины, присосанной к захватной поверхности. Для обеспечения исключительно щадящего в отношении удара контакта захватываемой полупроводниковой пластины с захватной поверхностью предусмотрено адаптированное по периметру амортизирующее устройство, создающее для захватываемой полупроводниковой пластины амортизирующее сопротивление. 2 н. и 5 з.п. ф-лы, 4 ил.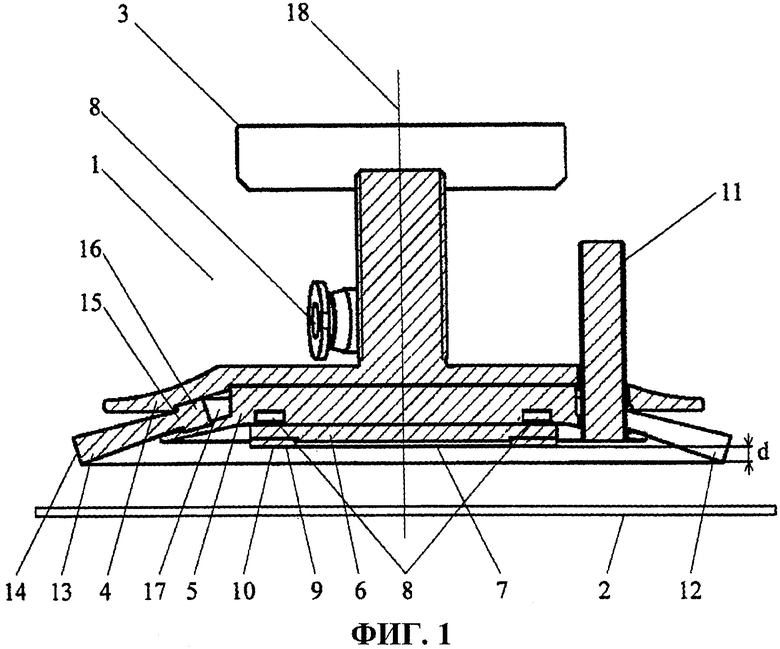
1. Захват, в частности захват (1) Бернулли, для приема плоскостных элементов, таких как, например, кремниевые полупроводниковые пластины (2), содержащий зажимное кольцо (4), соединенное с управляемой рукой (3) робота, соединенную с зажимным кольцом (4) посредством воронкообразного конструктивного элемента (5) ударную шайбу (6) с захватной поверхностью (7), сообщающейся с проходящей через воронкообразный конструктивный элемент (5) и ударную шайбу (6) поточной системой (8), посредством которой после подачи на захват (1) Бернулли избыточного давления у захватной поверхности (7) ударной шайбы (6) создается разрежение для присоса захватываемой полупроводниковой пластины (2), интегрированную в захватную поверхность (7) установочную поверхность (9) опорного кольца (10), посредством которой осуществляется бесскользящее перемещение полупроводниковой пластины (2), присосанной к захватной поверхности (7), и адаптированное к захвату (1) по периметру амортизирующее устройство (12), контур которого, если смотреть на захват (1) сверху, выходит по периметру за пределы контуров всех прочих элементов (4, 5, 6) захвата (1) и которое создает для захватываемой полупроводниковой пластины (2) при ее обусловленном присосом к захватной поверхности (7) подходе такое амортизирующее сопротивление, что полупроводниковая пластина (2) входит в контакт с установочной поверхностью (9) опорного кольца (10) щадящим в отношении удара образом, отличающийся тем, что установочная поверхность (9) опорного кольца (10) прорезинена, амортизирующее устройство (12), адаптированное к захвату (1) по периметру, образовано щеткой (12) с упругими щетинками, которые, если смотреть на захват (1) сбоку, выступают над всеми прочими элементами (4, 5, 6) захвата (1) на величину (d), находящуюся в диапазоне 1,5-3,5 мм, и создают для захватываемой полупроводниковой пластины (2) при обусловленном присосом к захватной поверхности (7) подходе в качестве первого контакта амортизирующее сопротивление, при этом на захвате (1) предусмотрен емкостный датчик (11) для распознавания полупроводниковой пластины (2), присосанной к захватной поверхности (7).
2. Захват по п.1, отличающийся тем, что концы (15) щетинок, противоположные свободно выходящим концам (14) щетинок, закреплены по окружной кромке (16) щетки, удерживаемой в окружном зажимном пазу (17) захвата (1) с возможностью замены, образуемом зажимным кольцом (4) и воронкообразным конструктивным элементом (5).
3. Захват по п.1 или 2, отличающийся тем, что, если смотреть на захват (1) сверху, контур захватной поверхности (7) ударной шайбы (6) и контур щетки (12) выполнены круговыми, причем ударная шайба (6) и щетка (12) расположены коаксиально продольной оси (18) захвата (1).
4. Захват по п.1, отличающийся тем, что упругие щетинки (13) щетки (12), если смотреть на захват (1) сверху, образуют открытое круглое кольцо примерно 340°, причем кольцевой участок (19) щетки (12) без щетинок пространственно относится к емкостному датчику (11) для распознавания присосанной полупроводниковой пластины (2).
5. Захват по п.1, отличающийся тем, что щетинки (13) щетки (12) проходят наклонно вниз относительно плоскости захватной поверхности (7) ударной шайбы (6) под углом (16,5±1°).
6. Захват по п.1, отличающийся тем, что упругие щетинки (13) щетки (12) выполнены из полиамида.
7. Захват, в частности захват (1) Бернулли, для приема плоскостных элементов, таких как, например, кремниевые полупроводниковые пластины (2), содержащий зажимное кольцо (4), соединенное с управляемой рукой (3) робота, соединенную с зажимным кольцом (4) посредством воронкообразного конструктивного элемента (5) ударную шайбу (6) с захватной поверхностью (7), сообщающейся с проходящей через воронкообразный конструктивный элемент (5) и ударную шайбу (6) поточной системой (8), посредством которой после подачи на захват (1) Бернулли избыточного давления у захватной поверхности (7) ударной шайбы (6) создается разрежение для присоса захватываемой полупроводниковой пластины (2), интегрированную в захватную поверхность (7) установочную поверхность (9) опорного кольца (10), посредством которой осуществляется бесскользящее перемещение полупроводниковой пластины (2), присосанной к захватной поверхности (7), и адаптированное к захвату (1) по периметру амортизирующее устройство (12), контур которого, если смотреть на захват (1) сверху, выходит по периметру за пределы контуров всех прочих элементов (4, 5, 6) захвата (1) и которое создает для захватываемой полупроводниковой пластины (2) при ее обусловленном присосом к захватной поверхности (7) подходе такое амортизирующее сопротивление, что полупроводниковая пластина (2) входит в контакт с установочной поверхностью (9) опорного кольца (10) щадящим в отношении удара образом, отличающийся тем, что установочная поверхность (9) опорного кольца (10) прорезинена, амортизирующее устройство (12), адаптированное к захвату (1) по периметру, образовано замкнутым резиновым кольцом в виде уплотнительной кромки из мягкого материала, посредством которого полупроводниковая пластина (2) при своем обусловленном присосом прилегании к прорезиненной установочной поверхности (9) опорного кольца (10), интегрированной в захватную поверхность (7), герметично уплотнена по периметру относительно ударной шайбы (6), через которую проходит проточная система (8), при этом на захвате (1) предусмотрен емкостный датчик (11) для распознавания полупроводниковой пластины (2), присосанной к захватной поверхности (7).
| US 6601888 B2, 05.08.2003 | |||
| US 6808216 В2, 26.10.2004 | |||
| Состав для получения защитного покрытия | 1985 |
|
SU1271623A1 |
| US 4852926 А, 01.08.1989 | |||
| МАНИПУЛЯТОР ДЛЯ ПЕРЕНОСА ТОНКИХ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН | 0 |
|
SU257628A1 |

