L
сл
с
Изобретение относится к машиностроению и может быть использовано в промышленных роботах-манипуляторах для захвата и транспортировки кинескопов.
Целью изобретения является повышение надежности работы за счет обеспечения возможности захвата открытого конуса кинескопа.
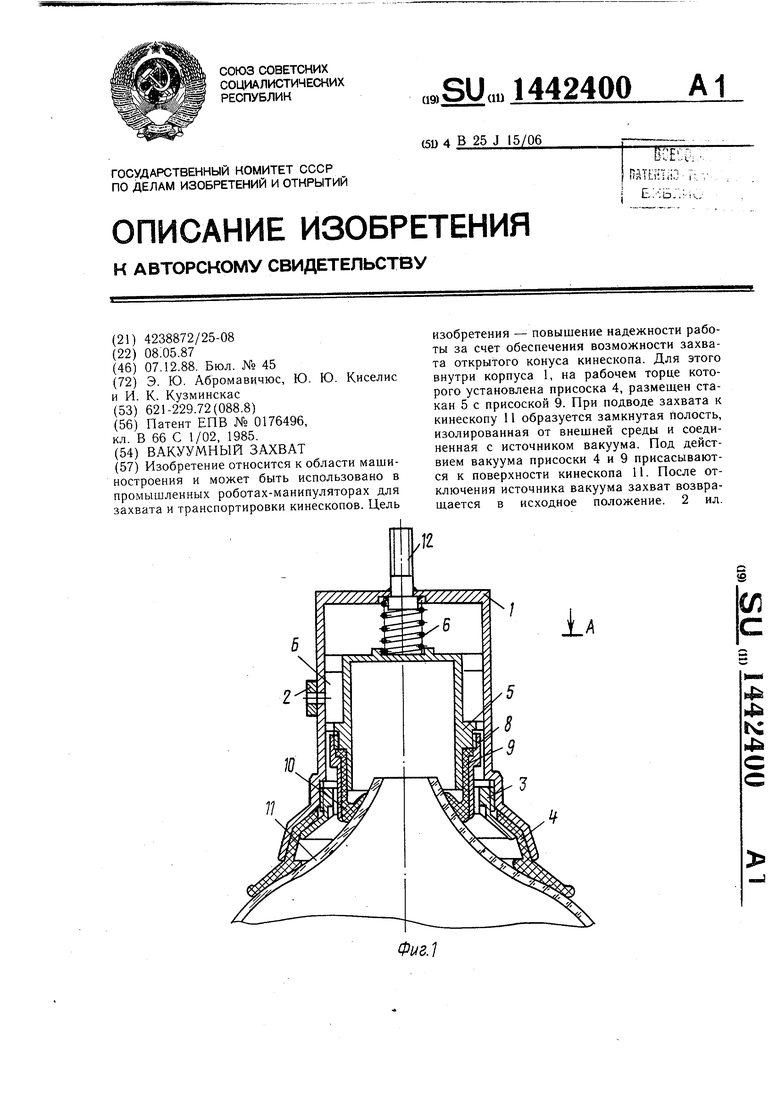
На фиг. 1 изображен вакуумный захват, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1.
Вакуумный захват содержит корпус 1, полость которого соединена ч ёрез бобышку 2 с источником вакуума (не показан). На корпусе 1 при помощи конусного кольца 3 закреплена присоска 4, выполненная из упру- гого материала, например резины. В корпусе 1 соосно ему установлен стакан 5, торец которого подпружинен пружиной 6 относительно корпуса 1. Стакан 5 установлен в корпусе 1 с возможностью вертикального перемепдения, при этом на наружной поверхности стакана 5 выполнены сегменты 7, образующие проточную полость Б между корпусом 1 и стаканом 5 (фиг. 2). На стакане 5 установлена при помощи кольца 8 присоска 9, выполненная также из упругого материала, например резины. Захватный участок 10 присоски 9 расположен в зоне, ограниченной образующей стакана 5. Угол, под которым расположены захватные поверхности присоски 4 и присоски 9 относительно вертикальной оси устройства, должен быть на 8-10° меньше угла захватываемой поверхности конуса кинескопа 11 для обеспечения надежного прилегания.
Вакуумный захват при помощи болта 12 крепится к исполнительному органу автоматического манипулятора или промыщленного робота (не показан).
Вакуумный захват работает следующим образом.
При подводе вакуумного захвата к кинескопу 11 присоска 9 прижимается к его поверхности. При дальнейшем вертикальном перемещении захвата вниз стакан 5 сжимает
пружину 6 до момента прижатия присоски 4 к поверхности конуса кинескопа 11. После прижатия присоски 4 между корпусом 1, стаканом 5 и конусом кинескопа 11 образуется замкнутая полость, изолированная от внешней среды и соединенная через бобышку 2 с источником вакуума. Под действием вакуума присоски 4и 9 присасываются к поверхности кинескопа 11. При этом на зах- ватный участок 10 присоски 9, расположенной в зоне, ограниченной образующей стакана 5, воздействует атмосферное давление полости стакана 5. Под действием атмосферного давления и разрежения между захватной поверхностью участка 10 и поверхностью кинескопа 11 захватный участок 10 плотно присасывается. Это обеспечивает
как герметизацию полости вакуумирования, так и дополнительное усилие зах.вата, обеспечивающее возможность надежного захвата открытого конуса кинескопа 11.
После отключения источника вакуума захват возвращается в исходное положение.
Формула изобретения
Вакуумный захват преимущественно для кинескопов, содержащий корпус с двумя кон- центрично расположенными на нем присосками, причем полость внешней присоски соединена с источником вакуума, отличающийся тем, что, с целью повышения надежности, он снабжен расположенным в корпусе соосно с присосками стаканом, открытый торец которого жестко связан с внутренней присоской, при этом стакан подпру;-кинен относительно корпуса.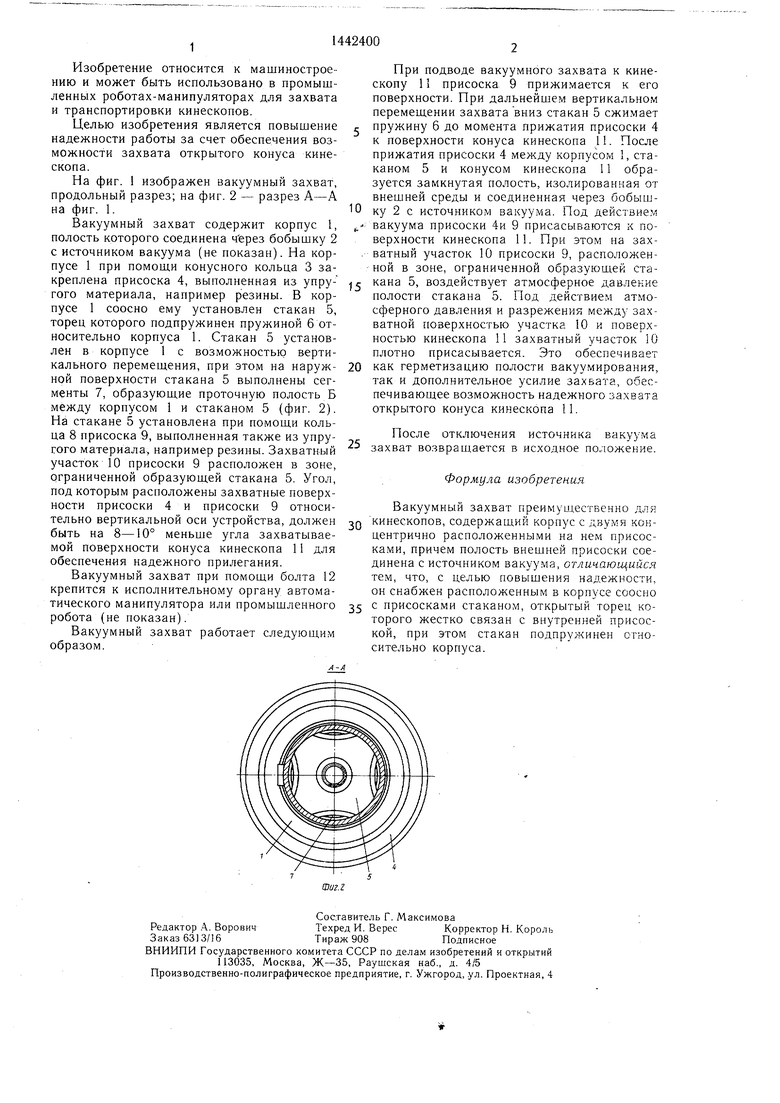
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| Вакуумный захват | 1990 |
|
SU1771959A1 |
| Вакуумный схват | 1986 |
|
SU1491702A1 |
| Вакуумный захватный орган | 1980 |
|
SU946743A1 |
| НИЗКОВАКУУМНЫЙ ДОИЛЬНЫЙ АППАРАТ | 2004 |
|
RU2293465C2 |
| Вакуумное грузозахватное устройство | 1986 |
|
SU1373667A1 |
| Магнитно-вакуумный захват | 1991 |
|
SU1811486A3 |
| Многопозиционный вакуумный захват | 1988 |
|
SU1662844A1 |
| Схват робота | 1987 |
|
SU1502299A1 |
Изобретение относится к области машиностроения и может быть использовано в промышленных роботах-манипуляторах для захвата и транспортировки кинескопов. Цель изобретения - повышение надежности работы за счет обеспечения возможности захвата открытого конуса кинескопа. Для этого внутри корпуса 1, на рабочем торце которого установлена присоска 4, размещен стакан 5 с присоской 9. При подводе захвата к кинескопу 11 образуется замкнутая полость, изолированная от внешней среды и соединенная с источником вакуума. Под действием вакуума присоски 4 и 9 присасываются к поверхности кинескопа 11. После отключения источника вакуума захват возвращается в исходное положение. 2 ил.