Изобретение относится к машиностроению, в частности к конструкции приводов кривошипных прессов.
Известная конструкция [Патент РФ №2283233. Г.П.Большаков, В.А.Крук, А.М.Литвиненко, Г.В.Воскресенский. Привод ползуна механического пресса. Опубл. 10.09.2008, бюл. №25, МПК В30В 1/14] привода ползуна механического пресса, содержащего приводной кривошипный вал, снабженный маховиком, шатун приводного кривошипного вала, шарнирно соединенный с приводным кривошипным валом, прицепной шатун, шарнирно соединенный с шатуном приводного кривошипного вала, кривошипный вал прицепного шатуна, шарнирно соединенный с прицепным шатуном и снабженный муфтой выключения и маховиком фиксатор ползуна, при этом согласно изобретению привод дополнительно содержит фиксатор ползуна, кривошипный вал ползуна, шарнирно соединенный с ползуном, причем кривошип связан с шатуном приводного кривошипного вала и прицепным шатуном соосным шарнирами, при этом длины радиусов всех кривошипов равны между собой.
Недостатком данного устройства является наличие силового электрического вала, обеспечивающего как синхронное, так и рассогласованное движение валов основного и прицепного шатунов.
Наиболее близким к заявленному по совокупности существенных признаков является привод механического пресса [Патент РФ №2288100. А.М.Литвиненко, В.А.Крук, Г.В.Воскресенский. Привод механического пресса. Опубл. 27.11.2006, бюл. №33, МПК В30В 15/14], содержащий основной и дополнительный электродвигатели, редуктор основного кривошипного вала и редуктор дополнительного кривошипного вала, отличающийся тем, что редуктор дополнительного вала выполнен в виде самотормозящего редуктора с соосным входным и выходным валами, при этом входной вал самотормозящего редуктора соединен с ротором дополнительного электродвигателя, статор которого установлен на дополнительном основании.
Недостатком данного привода является появление ошибки, вызванной неточным положением шатуна основного кривошипного вала, дополнительного и прицепного шатунов, которое обусловлено зазором в подшипнике и упругостью данных шатунов.
Изобретение направлено на устранение указанных недостатков.
Это достигается тем, что привод ползуна механического пресса, содержащий двигатели, основной кривошипный вал, снабженный маховиком, шатун основного кривошипного вала, шарнирно соединенный с основным кривошипным валом, прицепной шатун, шарнирно соединенный с шатуном основного кривошипного вала, дополнительный кривошипный вал с дополнительным шатуном, шарнирно соединенным с шатуном основного кривошипного вала, снабженный муфтой выключения и маховиком, согласно изобретению дополнительно снабжен датчиком взаимного положения шатуна основного кривошипного вала и дополнительного шатуна, который установлен в шарнире между упомянутыми шатуном основного кривошипного вала и дополнительным шатуном и подсоединен к системе управления приводом.
Достижение технического результата обусловлено наличием дополнительного датчика, который учитывает действительную ошибку перемещения шатуна основного кривошипного вала и дополнительного шатуна.
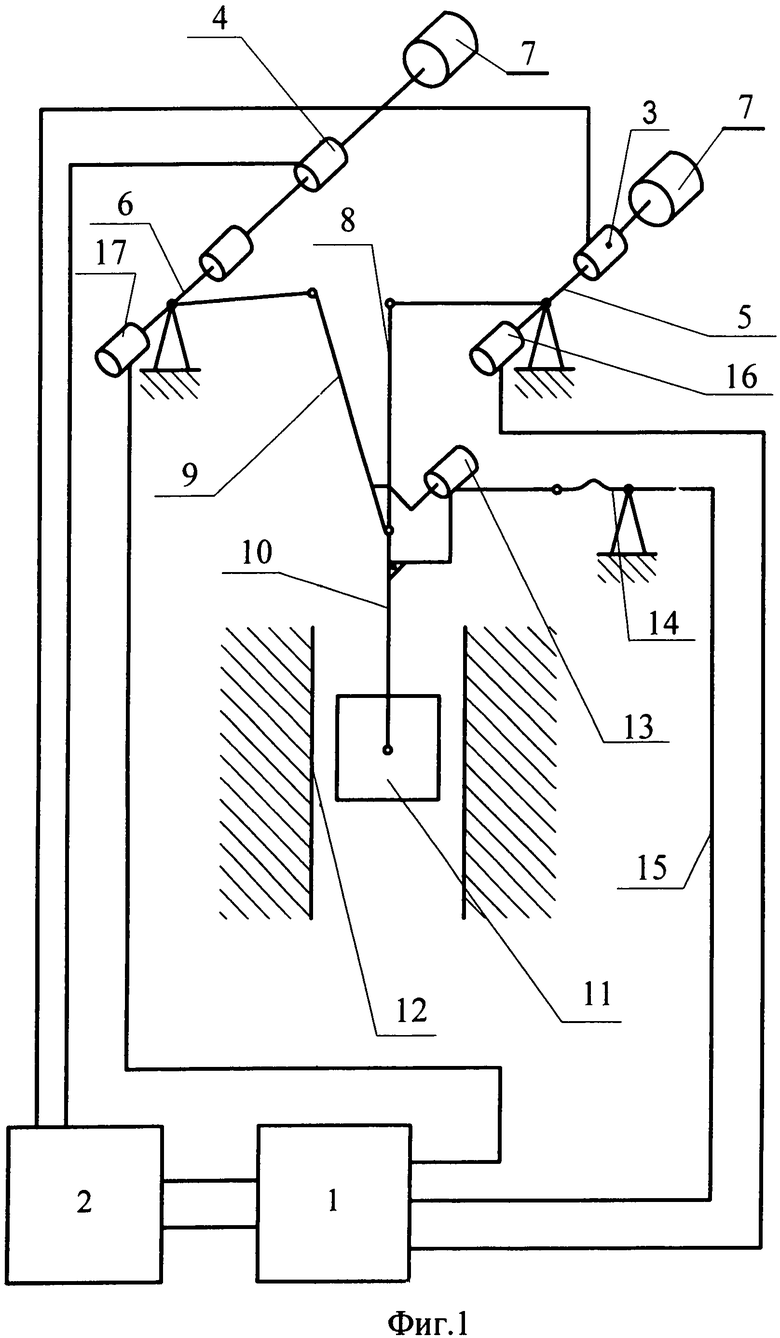
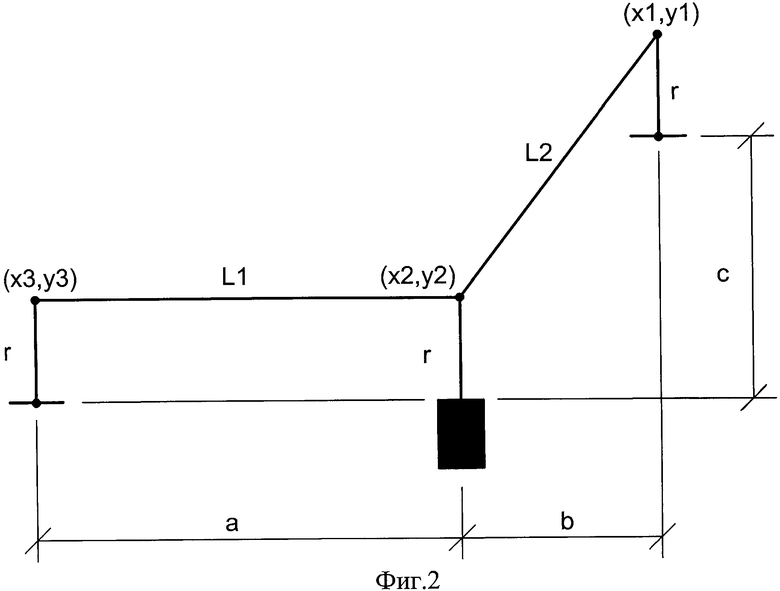
На фиг.1 схематично показана блок-схема заявленного привода, на фиг.2 показана графическая часть математической модели привода, выполненной в программной оболочке MathCad.
Обозначения, приведенные на фиг.2, имеют следующие значения:
r - радиусы маховиков основного и дополнительного кривошипных валов;
L1, L2 - длины дополнительного шатуна и шатуна основного кривошипного вала соответственно;
а, b, с - геометрия расположения частей относительно друг друга и оси ползуна.
Координаты точек шарнирных соединений кривошипов с шатунами, шатунов с кривошипной осью ползуна и ползуна обозначены соответственно: (х1, у1), (х2, у2), (х3, у3) и (х0, у0).
Привод механического пресса содержит систему управления (регулятор положения 1); силовую часть 2; двигатели 3, 4; основной кривошипный вала 5; дополнительный кривошипный вал 6; маховики 7; шатун 8 основного кривошипного вала; дополнительный шатун 9 дополнительного кривошипного вала 6; прицепной шатун 10; ползун 11, движущийся в направляющих 12, и датчик 13 взаимного положения шатуна основного кривошипного вала и дополнительного шатуна, который с помощью гибкого соединения 14 и проводов 15 подсоединен к системе управления. Кроме того, имеются датчики положения: датчик положения 16 основного кривошипного вала 5 и датчик положения 17 дополнительного кривошипного вала, которые также подсоединены к регулятору положения 1.
Привод работает следующим образом: в согласованном режиме движение кривошипных валов 5 и 6 синхронно. В случае осуществления других режимов напряжение подается на двигатель 4, статор которого воздействует на ротор, который в свою очередь через редуктор ускоряет или тормозит дополнительный шатун. При этом в закон изменения ординаты ползуна, искаженный из-за наличия зазора в шарнире между шатуном основного кривошипного вала и дополнительным шатуном, а также из-за наличия упругости шатунов, непрерывно вводится корректирующий сигнал с датчика 13 взаимного положения шатуна основного кривошипного вала и дополнительного шатуна, что приводит к стабилизации режимов работы.
Располагая законами изменения X2(t), Y2(t), X13(t) и зная, что X0(t)=a, можем определить для любого момента времени t закон изменения ординаты ползуна Y0(t):
 ;
;
где: X13(t) - сигнал с датчика.
Достоинством привода является то, что он обладает повышенной устойчивостью к воздействию возмущений, вызванных зазором и упругостью.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРМОЗ КРИВОШИПНОГО ПРЕССА | 2007 |
|
RU2350797C1 |
| ПРИВОД ПОЛЗУНА МЕХАНИЧЕСКОГО ПРЕССА | 2005 |
|
RU2283233C1 |
| Тормоз кривошипного пресса | 2021 |
|
RU2766616C1 |
| ПРИВОД МЕХАНИЧЕСКОГО ПРЕССА | 2005 |
|
RU2288100C1 |
| Тормоз кривошипного пресса | 2021 |
|
RU2769479C1 |
| Тормоз кривошипного пресса | 2017 |
|
RU2681073C1 |
| Зубчатый механизм пресса | 2023 |
|
RU2817027C1 |
| Система управления механического пресса | 1970 |
|
SU366674A1 |
| КРИВОШИПНЫЙ ПРЕСС | 2005 |
|
RU2308376C2 |
| ПАТЕНТНО-ТЕХИИНЕГКАЯ БИБЛИОТЕКАПРЕСС | 1971 |
|
SU299283A1 |
Изобретение относится к машиностроению и может быть использовано в механических кривошипных прессах. Привод ползуна пресса содержит двигатели, основной кривошипный вал с маховиком, шарнирно соединенный с шатуном, дополнительный кривошипный вал с дополнительным шатуном. С шатуном основного кривошипного вала шарнирно соединен прицепной шатун. Дополнительный вал снабжен муфтой выключения и маховиком. В шарнире между шатуном основного кривошипного вала и дополнительным шатуном установлен датчик взаимного положения упомянутых шатунов, который подсоединен к системе управления приводом. В результате обеспечивается повышение устойчивости к воздействию возмущений, вызванных зазором в шарнире между шатуном основного кривошипного вала и дополнительным шатуном и упругостью упомянутых шатунов. 2 ил.
Привод ползуна механического пресса, содержащий двигатели, основной кривошипный вал, снабженный маховиком, шатун основного кривошипного вала, шарнирно соединенный с основным кривошипным валом, прицепной шатун, шарнирно соединенный с шатуном основного кривошипного вала, дополнительный кривошипный вал с дополнительным шатуном, шарнирно соединенным с шатуном основного кривошипного вала, снабженный муфтой выключения и маховиком, систему управления приводом, отличающийся тем, что он дополнительно снабжен датчиком взаимного положения шатуна основного кривошипного вала и дополнительного шатуна, который установлен в шарнире между упомянутыми шатуном основного кривошипного вала и дополнительным шатуном и подсоединен к системе управления приводом.
| ПРИВОД МЕХАНИЧЕСКОГО ПРЕССА | 2005 |
|
RU2288100C1 |
| ПРИВОД ПОЛЗУНА МЕХАНИЧЕСКОГО ПРЕССА | 2005 |
|
RU2283233C1 |
| ПРИВОД МЕХАНИЧЕСКОГО ПРЕССА | 1972 |
|
SU434026A1 |
| JP 2004034057 А, 05.02.2004 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

