Изобретение относится к размагничиванию судов и касается вопросов настройки многодатчиковых систем управления магнитным полем, обеспечивающих минимизацию эксплуатационных изменений внешнего магнитного поля судна, посредством автоматического управления токами в обмотках судовых размагничивающих устройств.
Эффективность использования многодатчиковых систем управления магнитным полем судна существенно зависит от качества их настройки, в процессе которой необходимо выделять сигналы, обусловленные влиянием магнитного поля Земли и вызванной им индуцированной намагниченности судна для последующего их учета или компенсации. Необходимым условием выделения сигналов, обусловленных влиянием магнитного поля Земли, является изменение компонент магнитного поля Земли, действующих в направлении основных осей судна. Наиболее просто такое изменение может быть осуществлено для продольной и поперечной по отношению к судну компонент магнитного поля Земли. Для этого необходимо лишь изменять курс судна. Очевидно, что максимальные изменения продольной и поперечной компонент внешнего магнитного поля достигаются при поочередной ориентации судна по главным магнитным курсам.
Возможности изменения компоненты магнитного поля Земли, действующей вдоль вертикальной оси, значительно более ограничены, так как для такого изменения требуется изменение угла крена судна. В частности, для выделения сигнала, обусловленного влиянием вертикальной составляющей магнитного поля Земли, на установленный на судне магнитометрический датчик может быть использована известная методика (см. В.А.Бледнов «Основные принципы определения компонент магнитного поля Земли на движущихся ферромагнитных объектах (основы теории разделения полей)», УСПЕХИ ФИЗИЧЕСКИХ НАУК. Октябрь 1997 г., Том 167, №10), предусматривающая выполнение нескольких серий измерений, в каждую из которых входит определенное количество одновременных опросов компонентных магнитометрических датчиков, входящих в измерительную систему. К движущемуся объекту предъявляется только одно требование - переориентация на малые углы как минимум в двух любых взаимно ортогональных плоскостях. Обычно такое требование выполняется автоматически, так как при движении судно непроизвольно совершает подобные колебания.
При таком способе нет необходимости применения дополнительных устройств для обеспечения крена судна, однако его реализация весьма сложна, так как предусматривает синхронное измерение близких физических величин, требует использования высокоточной аппаратуры и характеризуется высокой трудоемкостью.
Более приемлемым для практического использования и наиболее близким к заявляемому способу является способ разделения магнитного поля судна, предусматривающий изменение действующей на судно вертикальной компоненты магнитного поля Земли посредством активных судовых успокоителей качки, используемых в режиме раскачивания (см. патент Великобритании № GB 2221037 A от 24.01.1990 г.) - прототип. В известном техническом решении также используется синхронное измерение вертикальной компоненты магнитного поля закрепленным на мачте датчиком и углов крена судна.
Известный способ обеспечивает достаточно большие изменения внешнего магнитного поля, действующего на судно в вертикальном направлении, однако применим только на судах, оснащенных активными успокоителями качки. Кроме того, ему свойственны динамическая погрешность, вызываемая вихревыми токами в проводящем корпусе судна, возникающими при качке, и погрешность из-за неизбежно возникающих, наряду с изменениями вертикальной компоненты, изменений поперечной компоненты действующего на судно магнитного поля.
Задачей предлагаемого изобретения является снижение погрешности выделения сигнала, обусловленного вертикальной составляющей магнитного поля Земли в бортовой многодатчиковой системе управления магнитным полем судна и упрощение процесса получения измерительной информации.
Выполнение поставленной задачи достигается тем, что в известном способе выделения сигнала, обусловленного влиянием вертикальной составляющей магнитного поля Земли, в бортовой многодатчиковой системе управления магнитным полем судна, включающем изменение действующего в направлении вертикальной оси судна внешнего магнитного поля путем принудительного кренования судна, измерение приращений электрических сигналов закрепленных на корпусе судна бортовых магнитометрических датчиков многодатчиковой системы управления магнитным полем судна и определение по результатам выполненных измерений сигнала, обусловленного влиянием вертикальной составляющей магнитного поля Земли, принудительное кренование для изменения внешнего магнитного поля в направлении вертикальной оси судна осуществляют в статическом режиме с помощью балластных цистерн при ориентации продольной оси судна в направлении Запад - Восток, для чего судно накреняют поочередно на оба борта; в одну сторону до достижения минимально допустимого угла между направлением вектора магнитного поля Земли и диаметральной плоскостью судна, и в противоположную сторону - на максимально допустимый угол крена, при этом измерения приращений электрических сигналов осуществляют по суммарному сигналу датчиков многодатчиковой системы управления магнитным полем судна.
Снижение погрешности выделения сигнала, обусловленного вертикальной составляющей магнитного поля Земли в бортовой многодатчиковой системе управления магнитным полем судна, обеспечивается совокупностью отличительных признаков предлагаемого способа.
Осуществление кренования судна в статическом режиме с помощью балластных цистерн позволяет полностью исключить динамическую погрешность, вызываемую вихревыми токами в проводящем корпусе судна, возникающими при качке. Кроме того, использование статических кренов упрощает процесс проведения измерений.
Сигнал, обусловленный влиянием вертикальной составляющей магнитного поля Земли на корпус судна, выделяется при действии двух максимально отличающихся значений вертикальной составляющей при крайних значениях угловых перемещений. Кренование проводится на магнитных курсах либо Восток, либо Запад, что исключает неблагоприятное воздействие продольной составляющей внешнего поля. Рациональный выбор углов крена на каждый из бортов судна позволяет повысить уровень приращений электрических сигналов бортовых магнитометрических датчиков, измеряемых при реализации предлагаемого способа, что приводит к снижению погрешности получения измерительной информации.
Измерение приращений электрических сигналов по суммарному сигналу датчиков многодатчиковой системы управления магнитным полем судна позволяет снизить погрешность из-за изменений поперечной компоненты действующего на судно магнитного поля, так как в суммарном сигнале из-за, как правило, имеющих место симметрии корпуса судна и симметричного размещения магнитометрических датчиков этот вид погрешности существенно ниже, чем в сигнале каждого конкретного датчика. Кроме того, погрешность суммарного сигнала датчиков многодатчиковой системы управления магнитным полем судна, обусловленная различного рода случайными помехами, убывает с ростом числа датчиков, что также благоприятно сказывается на погрешности выделения сигнала, обусловленного влиянием вертикальной составляющей магнитного поля Земли.
Сущность предлагаемого изобретения поясняется рисунком, на котором схематично представлены ферромагнитный корпус судна с закрепленными на нем бортовыми магнитометрическими датчиками. На корпусе 1 судна установлены симметрично относительно диаметральной плоскости (ДП) судна и закреплены магнитометрические датчики 2. Показаны также векторные величины магнитного поля, действующего на корпус судна и угловые параметры, используемые в пояснении сущности предлагаемого изобретения. На рисунке приняты следующие обозначения:
Нз - вектор магнитного поля Земли;
Hz - вертикальная составляющая магнитного поля Земли;
Ну - горизонтальная составляющая магнитного поля Земли;
φ - максимально допустимый угол крена судна;
α - угол между вертикальным направлением и вектором магнитного поля Земли (α=arctg(Hy/Hz));
Δα - угол между направлением вектора магнитного поля Земли и диаметральной плоскостью судна при крене.
В случаях если α≤φ, судно накреняют в сторону уменьшения угла между ДП и вектором магнитного поля Земли на угол α. При этом Δα=0. В случаях если α>φ, судно накреняют на угол φ. При этом Δα=α-φ.
Выделение сигнала, обусловленного влиянием вертикальной составляющей магнитного поля Земли, в бортовой многодатчиковой системе управления магнитным полем судна предлагаемым способом осуществляется следующим образом.
На измерительном стенде судно устанавливается магнитным курсом Восток или Запад. Для данной широтной зоны определяются элементы земного магнетизма Hz, Ну, например Hz=52,7 мкТл, Ну=12,6 мкТл. Затем рассчитывают угол α.
α=arctg(Hy/Hz)=13,5°.
Для данного судна φ=14°. Величина Нз=54,2 мкТл.
При крене в направлении сближения с вектором Нз устанавливается крен 13,5°. В этом случае на судно в вертикальном направлении действует 54,2 мкТл. В этом положении фиксируется значение суммарного сигнала бортовых магнитометрических датчиков.
При крене на другой борт устанавливается крен 14°. При этом на судно в вертикальном направлении действует 48,2 мкТл. В этом положении также фиксируется значение суммарного сигнала бортовых магнитометрических датчиков.
По результатам выполненных измерений определяется сигнал, обусловленный вертикальной составляющей магнитного поля Земли.
При выполнении данной операции обеспечивается изменение вертикальной составляющей внешнего магнитного поля, равное 6 мкТл, составляющее 14% от действующей на судно вертикальной составляющей магнитного поля Земли, что при обычно реализуемой приборной погрешности 0,5% обеспечивает определение сигнала, обусловленного вертикальной составляющей магнитного поля Земли, с вполне удовлетворительной погрешностью.
Предлагаемый способ позволяет снизить погрешность выделения сигнала, обусловленного влиянием вертикальной составляющей магнитного поля Земли, и повысить качество настройки систем управления магнитным полем судна, что выгодно отличает его от прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАСТРОЙКИ МАГНИТОМЕТРИЧЕСКОГО МНОГОДАТЧИКОВОГО РЕГУЛЯТОРА ТОКОВ В ОБМОТКАХ РАЗМАГНИЧИВАЮЩЕГО УСТРОЙСТВА СУДНА С ФЕРРОМАГНИТНЫМ КОРПУСОМ | 2009 |
|
RU2412857C1 |
| УСТРОЙСТВО ДЛЯ ВЫДЕЛЕНИЯ СИГНАЛА, ОБУСЛОВЛЕННОГО ВЛИЯНИЕМ ВЕРТИКАЛЬНОЙ СОСТАВЛЯЮЩЕЙ МАГНИТНОГО ПОЛЯ ЗЕМЛИ НА БОРТОВУЮ СИСТЕМУ КОНТРОЛЯ МАГНИТНОГО ПОЛЯ ПОДВОДНОГО ОБЪЕКТА | 2012 |
|
RU2522688C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ТОКАМИ В ОБМОТКАХ РАЗМАГНИЧИВАЮЩЕГО УСТРОЙСТВА СУДНА С ФЕРРОМАГНИТНЫМ КОРПУСОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2415050C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433427C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433429C2 |
| СПОСОБ ПОВЕРКИ МАГНИТОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 2012 |
|
RU2503026C1 |
| РАЗМАГНИЧИВАЮЩЕЕ УСТРОЙСТВО СУДНА | 2008 |
|
RU2381139C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2007 |
|
RU2331090C1 |
| СПОСОБ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2008 |
|
RU2390803C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ ДЕВИАЦИИ МАГНИТОМЕТРИЧЕСКИХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550774C1 |
Изобретение относится к технике размагничивания судов и касается вопросов настройки многодатчиковых систем управления магнитным полем, обеспечивающих минимизацию эксплуатационных изменений внешнего магнитного поля судна. Способ включает изменение действующего в направлении вертикальной оси судна внешнего магнитного поля путем принудительного кренования судна, измерение приращений электрических сигналов закрепленных на корпусе судна бортовых магнитометрических датчиков многодатчиковой системы управления магнитным полем судна и определение по результатам выполненных измерений сигнала, обусловленного влиянием вертикальной составляющей магнитного поля Земли. Принудительное кренование для изменения внешнего магнитного поля в направлении вертикальной оси судна осуществляют в статическом режиме с помощью балластных цистерн, ориентируя продольную ось судна в направлении Запад - Восток. Для этого накреняют судно поочередно на оба борта: в одну сторону до достижения минимально допустимого угла между направлением вектора магнитного поля Земли и диаметральной плоскостью судна, а в противоположную сторону - на максимально допустимый угол крена. При этом измерения приращений электрических сигналов осуществляют по суммарному сигналу датчиков многодатчиковой системы управления магнитным полем судна. Изобретение позволяет снизить погрешность выделения сигнала, обусловленного влиянием вертикальной составляющей магнитного поля Земли, повысить качество настройки систем управления магнитным полем судна и упростить процесс, получения измерительной информации. 1 ил.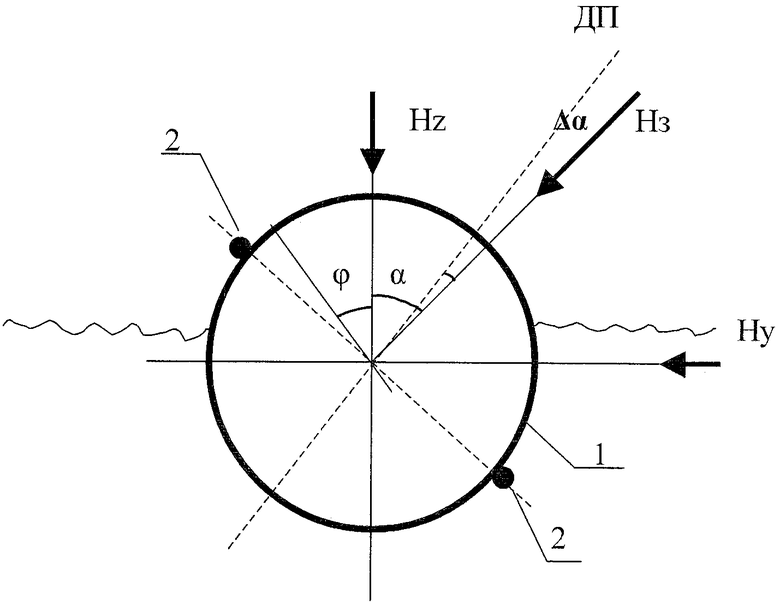
Способ выделения сигнала, обусловленного влиянием вертикальной составляющей магнитного поля Земли, в бортовой многодатчиковой системе управления магнитным полем судна, включающий изменение действующего в направлении вертикальной оси судна внешнего магнитного поля путем принудительного кренования судна, измерение приращений электрических сигналов закрепленных на корпусе судна бортовых магнитометрических датчиков многодатчиковой системы управления магнитным полем судна и определение по результатам выполненных измерений сигнала, обусловленного влиянием вертикальной составляющей магнитного поля Земли, отличающийся тем, что принудительное кренование для изменения внешнего магнитного поля в направлении вертикальной оси судна осуществляют в статическом режиме с помощью балластных цистерн, ориентируя продольную ось судна в направлении Запад - Восток, для чего накреняют судно поочередно на оба борта: в одну сторону до достижения минимально допустимого угла между направлением вектора магнитного поля Земли и диаметральной плоскостью судна и в противоположную сторону - на максимально допустимый угол крена, при этом измерения приращений электрических сигналов осуществляют по суммарному сигналу датчиков многодатчиковой системы управления магнитным полем судна.
| КОМПОЗИЦИЯ ИНГРЕДИЕНТОВ ДЛЯ АЛКОГОЛЬНОГО НАПИТКА "ГЕМАТОНИК" | 2001 |
|
RU2221037C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НА БОРТУ ДВИЖУЩЕГОСЯ ФЕРРОМАГНИТНОГО НОСИТЕЛЯ КОМПОНЕНТ МАГНИТНОГО ПОЛЯ ЗЕМЛИ И СОСТАВЛЯЮЩИХ ЕГО СОБСТВЕННОГО МАГНИТНОГО ПОЛЯ | 1994 |
|
RU2073891C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНДУКЦИИ ГЕОМАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2002 |
|
RU2206109C1 |
| Устройство для измерения вариаций магнитного поля Земли в движении | 1982 |
|
SU1124240A1 |

